第二章机器人操作手运动学
- 格式:ppt
- 大小:2.54 MB
- 文档页数:36

![第2章 机器人运动学—数学基础[可打印版,含习题]](https://uimg.taocdn.com/c5aed3c4a1c7aa00b52acbd8.webp)
第二章工业机器人的机械结构和运动控制章节目录2。
1 工业机器人的系统组成2。
1。
1 操作机2。
1。
2 控制器2。
1.3 示教器2。
2 工业机器人的技术指标学习目标导入案例课堂认知扩展与提高本章小结思考练习2.3 工业机器人的运动控制2.3.1 机器人运动学问题2。
3。
2 机器人的点位运动…2。
3.3 机器人的位置控制课前回顾何为工业机器人?工业机器人具有几个显著特点,分别是什么?工业机器人的常见分类有哪些,简述其行业应用。
学习目标认知目标*熟悉工业机器人的常见技术指标*掌握工业机器人的机构组成及各部分的功能*了解工业机器人的运动控制能力目标*能够正确识别工业机器人的基本组成*能够正确判别工业机器人的点位运动和连续路径运动导入案例国产机器人竞争力缺失关键技术是瓶颈众所周知,中国机器人产业由于先天因素,在单体与核心零部件仍然落后于日、美、韩等发达国家。
虽然中国机器人产业经过 30 年的发展,形成了较为完善的产业基础,但与发达国家相比,仍存在较大差距,产业基础依然薄弱,关键零部件严重依赖进口.整个机器人产业链主要分为上游核心零部件(主要是机器人三大核心零部件——伺服电机、减速器和控制系统,相当于机器人的“大脑")、中游机器人本体(机器人的“身体”)和下游系统集成商(国内 95% 的企业都集中在这个环节上)三个层面.课堂认知2.1 工业机器人的系统组成第一代工业机器人主要由以下几部分组成:操作机、控制器和示教器。
对于第二代及第三代工业机器人还包括感知系统和分析决策系统,它们分别由传感器及软件实现。
工业机器人系统组成2。
1.1 操作机操作机(或称机器人本体)是工业机器人的机械主体,是用来完成各种作业的执行机构。
它主要由机械臂、驱动装置、传动单元及内部传感器等部分组成.关节型机器人操作机基本构造机器人操作机最后一个轴的机械接口通常为一连接法兰,可接装不同的机械操作装置,如夹紧爪、吸盘、焊枪等。
(1)机械臂关节型工业机器人的机械臂是由关节连在一起的许多机械连杆的集合体。
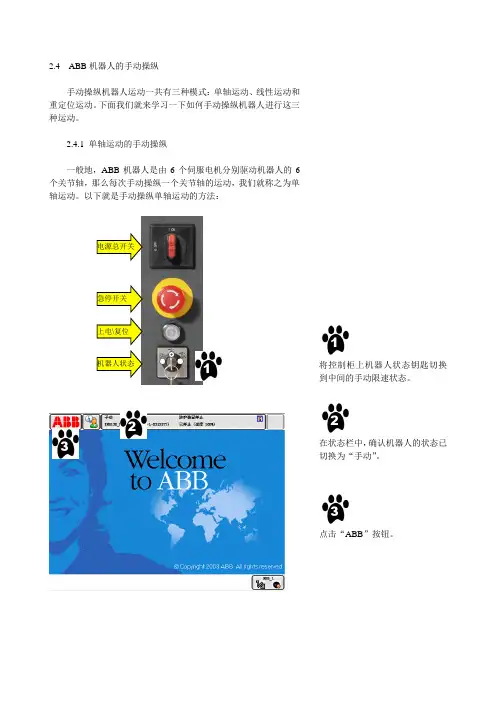
2.4 ABB 机器人的手动操纵手动操纵机器人运动一共有三种模式:单轴运动、线性运动和重定位运动。
下面我们就来学习一下如何手动操纵机器人进行这三种运动。
2.4.1 单轴运动的手动操纵一般地,ABB 机器人是由6个伺服电机分别驱动机器人的6个关节轴,那么每次手动操纵一个关节轴的运动,我们就称之为单轴运动。
以下就是手动操纵单轴运动的方法:将控制柜上机器人状态钥匙切换到中间的手动限速状态。
在状态栏中,确认机器人的状态已切换为“手动”。
点击“ABB ”按钮。
电源总开关急停开关上电\复位机器人状态选择“手动操纵”。
点击“动作模式”。
选中“轴1-3”,然后点击“确定”。
选中“轴4-6”,就可以操纵轴4-6.用左手按下使能按钮,进入“电机开启”状态。
在状态栏中,确认“电机开启”状态。
显示“轴1-3”的操纵杆方向。
黄箭头代表正方向。
操纵杆的使用技巧:我们可以将机器人的操纵杆比作汽车的油门,操纵杆的操纵幅度是与机器人的运动速度相关的。
操纵幅度较小则机器人运动速度较慢。
操纵幅度较大则机器人运动速度较快。
所以大家在操作的时候,尽量以操纵小幅度使机器人慢慢运动,开始我们的手动操纵学习。
2.4.2 线性运动的手动操纵机器人的线性运动是指安装在机器人第六轴法兰盘上的工具在空间中作线性运动。
以下就是手动操纵线性运动的方法:机器人六个轴的位置选择“手动操纵”点击“动作模式”。
选择“线性”,然后点击“确定”。
点击“工具坐标”。
机器人的线性运动是指安装在第六轴法兰盘上的工具在空间中线性运动,所以要在“工具坐标”中指定对应的工具。
选中对应的工具“tool1”。
关于工具数据的建立,请查看本书的第四章第4节的内容。
用左手按下使能按钮,进入“电机开启”状态。
在状态栏中,确认“电机开启”状态。
显示“轴X Y Z”的操纵杆方向。
黄箭头代表正方向。
增量模式的使用:工具的TCP点在空间中线性运动。
操纵杆的使用技巧:我们可以将机器人的操纵杆比作汽车的油门,操纵杆的操纵幅度是与机器人的运动速度相关的。
第二章机器人基础知识2.3工业机器人运动学(一)【内容提要】本课主要学习工业机器人技术的运动学基础知识,涉及机器人正逆运动学的概念、平面二连杆机器人的运动学、以及机器人一般运动学的数学基础(位姿描述、齐次变换及运算)。
知识要点:✓机器人正逆运动学概念✓平面二连杆机器人的正逆运动学✓机器人的位姿描述✓齐次变换及运算重点:✓掌握机器人正逆运动学概念✓掌握平面二连杆机器人的正逆运动学✓理解机器人的位姿描述和齐次变换✓掌握齐次变换及运算难点:✓机器人的位姿描述、齐次变换及运算关键字:✓机器人正逆运动学、平面二连杆机器人、位姿描述、齐次变换及运算【本课内容相关资料】2.3机器人运动学从机构学的角度看,机器人可以看成开式运动链结构,由一系列连杆通转动或移动关节串联而成。
机器人运动学研究的是机器人各关节运动的几何关系,具体而言是各连杆之间的位移关系、速度关系和加速度关系。
本节仅研究位移关系,重点是研究手部相对于机座的位姿与各连杆之间的相互关系。
“位姿”是“位置和姿态”的简称。
工业机器人手部相对于机座的位姿与工业机器人各连杆之间的相互关系直接相关。
为了便于数学上的分析,一般将连杆和关节按空间顺序进行编号。
同时,选定一个与机座固联的坐标系,称为固定坐标系,并为每一个连杆(包括手部)选定一个与之固联的坐标系,称为连杆坐标系。
一般把机座也视为一个连杆,即零号连杆。
这样,连杆之间的相互关系可以用连杆坐标系之间的相互关系来描述。
工业机器人手部相对机座的位姿就是固联在手部的坐标系相对固定坐标系的位姿。
这样,就可以将“手部相对于机座的位姿”这样一个物理问题转化为一个数学问题,即,得到了工业机器人的运动学数学模型,便于用计算机进行分析计算。
工业机器人运动学主要包括正向运动学和反向运动学两类问题。
正向运动学是在已知各个关节变量的前提下,解决如何建立工业机器人运动学方程,以及如何求解手部相对固定坐标系位姿的问题。
反向运动学则是在已知手部要到达目标位姿的前提下,解决如何求出关节变量的问题。
教案(章、节备课)教案(课时备课)第3次课2学时图2.1 空间任一点的坐标表示课目、课题第一节 位姿描述1、 齐次坐标2。
动系的位姿表示教学目的和要求掌握齐次坐标及动系位姿表示重点 难点重点: 齐次坐标和动系位姿表示 难点:动系位姿表示教学进程(含课堂教学内容、教学方法、辅助手段、师生互动、时间分配、板书设计)一、复习 二、讲授新课2、1 位姿描述2。
1。
1 齐次坐标一、空间任意点的坐标表示 在选定的直角坐标系{A }中,空间任一点P的位置能够用3 ⨯ 1的位置矢量A P 表示,其左上标表示选定的坐标系{A },此时AP =[P X PY P Z]T式中:P X 、P Y 、P Z是点P 在坐标系{A }中的 三个位置坐标分量,如图2、1所示。
二、齐次坐标表示将一个n 维空间的点用n + 1维坐标表示,则该n + 1维坐标即为n 维坐标的齐次坐标。
一般情况下w称为该齐次坐标中的比例因子,当取w = 1时,其表示方法称为齐次坐标的规格化形式,即 P = [P X PY P Z 1]T三、坐标轴的方向表示i 、j、k 分别表示直角坐标系中X 、Y、Z 坐标轴的单位矢量,用齐次坐标表示之,则有X = [1 0 0 0 ]TY = [0 1 0 0]TZ = [0 0 1 0]T由上述可知,若规定:4 ⨯ 1列阵[a b c w ]T 中第四个元素为零,且满足a 2+ b2 + c 2 = 1,则[a b c 0]T中a 、b 、c 的表示某轴的方向; 4 ⨯ 1列阵[a b c w]T 中第四个元素不为零,则[a b c w]T 表示空间某点的位置。
四、矢量的方向表示图2。
2中所示的矢量u的方向用4 ⨯ 1列阵可表达为:u = [a b c 0]T图2.2坐标轴及矢量的方向表示图2.4 连杆的位姿表示a = cos α,b =c os β,c = cos γ图2。
2中所示的矢量u 的起点O 为坐标原点,用4 ⨯ 1列阵可表达为:O = [0 0 0 1]T例2。