MATCH-AT空三加密软件操作手册
- 格式:pdf
- 大小:7.00 MB
- 文档页数:39

第六章-空三加密第六章空三加密空三加密即解析空中三角测量,指的是用摄影测量解析法确定区域内所有影像的外方位元素。
空三加密的传统做法是利用少量控制点的像方和物方坐标,解求出未知点的坐标,使得每个模型中的已知点都增加四个以上,然后利用这些已知点解求所有影像的外方位元素。
这中间包含一个已知点由少到多的过程,所以形象地称之为空三加密。
概括地讲,空三加密的目的可以分为两个方面:第一是用于地形测图的摄影测量加密;第二是高精度摄影测量加密,用于各种不同的目的(张剑清,2003)。
本章以MapMatrix系统空三加密相关模块AATMatrix的操作流程为例介绍空三加密的主要流程,包括单像空间后方交会、GPS辅助空三、GPS/IMU联合平差、光束法区域网平差等内容。
作为补充和比较,又增加介绍了LPS空三的过程。
6.1 实习内容和要求本章的实习内容主要是空中三角测量,要求同学们能够掌握控制三角测量和光束法平差的原理方法,熟悉用AATMatrix和LPS两个软件进行空三加密的流程。
6.2 AATMatrix空三加密6.2.1 原理和操作流程概述利用测区中影像连接点(加密点)的像点坐标和少量的已知像点坐标及其大地坐标的地面控制点,通过平差计算,求解连接点的大地坐标与影像的外方位元素,称为区域网空中三角测量。
区域网空中三角测量提供的平差结果是后续的一系列摄影测量处理与应用的基础。
区域网空中三角测量按平差单元可分为航带法、独立模型法和光束法,其中光束法理论最严密、解算精度最高。
成为空三的主流方法。
光束法区域网平差的基本思想是,以每张像片为单元,区域内每张像片的控制点、加密点都列立共线条件方程式,建立全区域统一的误差方程,统一平差解算,整体解求区域内每张像片的6个外方位元素及所有加密点的地面坐标。
AATMatrix单个测区工作流程图如图6-1所示:1. 测区参数设置,包括摄影比例尺,测区编号,以及相机类型等2.相机参数的导入,注意相机文件的路径3.影像的导入,设置航带数及添加影像并且对像素大小,相机参数,相机是否反转等进行设置4.控制点导入,注意PATB不支持带字母的控制点格式并且注意路径(或GPS/IMU参数的导人,注意线元素和角元素的顺序关系)三.操作步骤:5.内定向,包括手工和自动量测两种方式6.航带连接,通过相邻相邻航带间的航带连接点确定航带间的连接关系,为后期航带间转点提供初值(如果是GPS辅助空三,不需要做航带连接)7.自动提取,通过相对定向确定航带内相临影像之间相对位置关系,以及由公共连接点来确定相对定向模型。

多视几何理论辅助的无人机低空摄影测量解析空三于瑞鹏【摘要】针对地形起伏大、高差大的测区,Inpho软件空三加密结果不理想或者无法完成空三加密.为此文中提出利用PhotoScan软件先对影像进行匹配处理,将经过优化的外方位元素,导入Inpho软件进行空三加密,两者结合,结果发现空三精度和速度大大提高.【期刊名称】《矿山测量》【年(卷),期】2017(045)006【总页数】4页(P73-75,104)【关键词】Inpho;PhotoScan;POS;外方位元素;空三加密【作者】于瑞鹏【作者单位】山东省第一地质矿产勘查院,山东济南 250014【正文语种】中文【中图分类】TD178;P231.2在摄影测量数字化成图作业时,空三加密是重要步骤之一,其方法是利用像片上的像点坐标与一些定向的控制点,采用摄影测量的方法来计算每个影像的外方位元素,然后依据摄影测量过程的几何反转,重新构建可以量测的几何立体模型,基于此方法就可以计算与像点对应的地面上点的坐标[1-2]。
由GPS定位技术获取航摄仪的位置参数,由IMU测定其姿态参数。
在无人机飞行条件下,GPS接收机定位精度很难实现高精度定位,信号容易失锁或者发生周跳,虽然修复周跳和信号失锁的方法有很多,但其定位精度和可靠性在高速度情况下也难以保证,对定位结果造成影响[3]。
利用原始的POS数据做空三加密时,结果不理想或者失败,因此如何提高空三加密的精度和速度就成为一个非常重要的研究内容。
根据生产实践,探讨PhotoScan辅助Inpho软件做空三加密的方法和技巧。
1 数据处理系统1.1 PhotoScan优化影像外方位元素流程Agisoft PhotoScan Professional是一个按照计算机视觉自动生成3D模型的软件。
采用多视图3D重建技术,可以处理具有重叠区域的图像,并且能够采用添加外部控制点的方法来生成具有真实地理空间坐标的3D模型。
可使用该软件处理航空摄影图像或高分辨率数码相机拍摄的图像。
INPHO软件自动空三加密启动软件后建立一个新的工程,点击菜单栏的File,弹出窗口点击New File 弹出对话窗口点击ok,出现下面的窗口。
根据相关的设计文件,数据视情况开始相应的操作1.建立相机文件双击1弹出下面的对话窗口点击后弹出窗口填写相应的相机名称、类型、镜头类型。
点击后,弹出窗口点击,出窗口根据相机的检校文件,把相应的值填写到窗口中,由于影像经过畸变差改正所在像主点的坐标值都给定零值,点击接着点击下图中的到此相机文件就建好了。
2.导入影像数据回到project editor界面,双击Frame Type,弹出对话框。
在对话框,选择Import的第一个选项,如下图点击按钮,选中选择影像存放的工程目录文件夹点击按钮影像导入,在“”处填写飞行区域的地面平均高度值,点击按钮进行下一步点击按钮,出现下图的操作点击图中的按钮,点击下图中的按钮3.影像就导入工程完成了。
导入GPS导航数据导入航片初始坐标,即根据数据检查软件输出的XYZ坐标为初设概略航片坐标。
格式如下:# /航带分隔符11 x11 y11 z11 /航片号 X坐标 Y坐标 Z坐标12 x12 y12 z12#21 x21 y21 z2122 x22 y22 z22#⋯⋯⋯⋯#如果是GPS辅助摄影,按photoID px py pz omega phi kappa顺序导入,航带之间用“#”隔开。
接着双击下图中红线标注处双击后弹出下图的窗口点击上图中红色框标处,出现下图的对话窗口点击上图中红色框标处,出现下图的对话窗口选择根据数据检查软件输出的XYZ坐标建立的GPS导航数据后,双击图中红色框标注的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口把影像序号、坐标对应好后点击上图中的按钮出现下图的对话窗口勾选相对应的选项后点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口根据设计要求填入限差值。
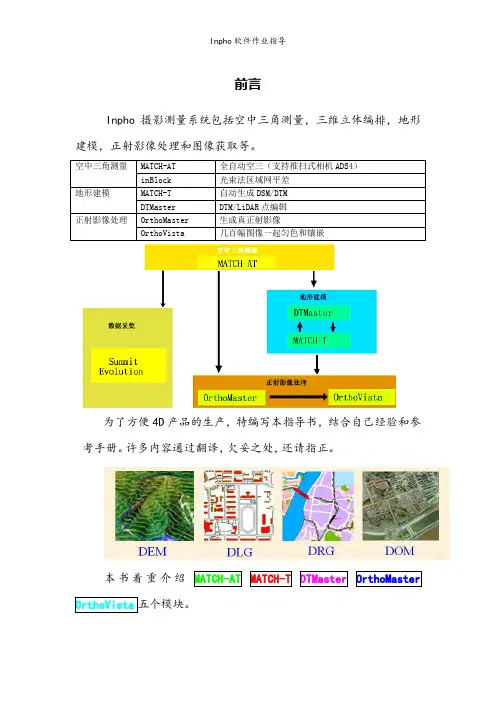
前言Inpho 摄影测量系统包括空中三角测量,三维立体编排,地形建模,正射影像处理和图像获取等。
空中三角测量MATCH-AT 全自动空三(支持推扫式相机ADS4)inBlock 光束法区域网平差地形建模MATCH-T 自动生成DSM/DTMDTMaster DTM/LiDAR点编辑正射影像处理OrthoMaster 生成真正射影像OrthoVista 几百幅图像一起匀色和镶嵌为了方便4D产品的生产,特编写本指导书,结合自己经验和参考手册。
许多内容通过翻译,欠妥之处,还请指正。
本书着重介绍MATCH-AT MATCH-T DTMaster OrthoMaster OrthoVista五个模块。
1.1.MATCH-AT 自动空三加密S S T T E E P P11新建工程,需要以下几个数据:数字影像相机文件外方位元素初始值外业控制资料(控制点成果和刺点片)工作内容•指定项目名称•载入近似中心(GPS、INS)•载入图像•确定单位,像素大小,照相机的名称和mount rotation,地形高度•自动设定块打开Match-AT,点击,下拉点击弹出对话窗①输入工程名和存储路径②导入航片初始坐标,即根据航摄索引图等初设概略航片坐标。
格式如下2750 388000 5000000 3000 /航片号 X坐标 Y坐标 Z坐标2749 389000 5000000 30002748 390000 5000000 3000# /航带分隔符2779 360000 4997000 30002780 361000 4997000 30002781 362000 4997000 3000#…………#如果是GPS辅助摄影,按# Strip 1759 539286.802 335214.655 1774.851 -1.8738 -0.3952 -3.4960760 539839.899 335206.408 1782.623 -1.5935 -0.3668 -3.4721761 540439.471 335192.804 1783.540 0.2288 0.8253 -3.7421# Strip 2... ... ...顺序导入,航带之间用“#”隔开。

Inpho软件在文登航空数字地形图测绘项目中的应用摘要:本文使用的软件inpho全数字摄影测量工作站对文登1:500航空摄影测绘项目进行空三加密,该项目使用UltraCam Eagle航摄仪进行航飞,生产1:500DLG、DEM、DOM,所以要求空三加密的精度非常高,针对在空三加密实际作业中遇到的一些实际情况和解决的办法进行分析,并对空三加密的技术流程进行了说明。
一、已有资料分析该摄区原始影像共2998张UCE原始影像,航空摄影时航向重叠度60%-65%,旁向重叠度30%-40%,旋偏角不大于15o,最大不超过25o。
在一条航线上达到或接近最大旋偏角的像片不超过3片;在一个摄区内出现最大旋偏角的像片数不超过测区像片总数的4%,另外该项目提供了初始pos数据。
根据该区的航飞情况和已有资料情况,该区域共划分为四个加密区块,根据国家空中三角摄影测量的规范,并结合着自己多年从事空三加密的工作经验,本项目像控布点的基本方案是每隔8到10条基线逐条航线布点,但是北部山区丛林密布,地形险恶,仅有个别小路,山上为数不多的几座房屋还是军事基地,禁止进入,对像控布设加大了困难,最后在北部山区布点方案放宽到16基线,航带间跨越1条航带,对空三加密带来很大的困难,并且对最终能否达到的精度也存在着很大担忧。
二、空三加密目的空三加密即解析空中三角测量,指的是利用摄影测量解析法确定区域内所有影像的外方位元素。
空三加密的传统做法是利用少量控制点的像方和物方坐标,解求出未知点的坐标,使得每个模型中的已知点都增加四个以上,然后利用这些已知点解求所有影像的外方位元素。
这中间包含一个已知点由少到多的过程,所以形象地称之为空三加密,空三加密是航空摄影测量的第一步,它决定数字测图的精度和质量,所以减少空三加密的误差是保证后续工作的基础。
三、光束法平差的基本原理平差的基本原理是以一张相片组成的一束光束作为一个平差单元,以中心投影的共线方程作为平差基础方程,通过各光线束在空间的旋转和平移,使模型之间的公共光线实现最佳交汇,使整体区域最佳的纳入到控制点坐标系中,从而确定加密点的地面坐标和影像的外方位元素。
无人机数据处理完整解决方案操作手册目录1产品特点 (1)1。
1无人驾驶小飞机项目情况简介 (2)1.2数据处理软件技术指标 (3)1.3硬件设备要求 (3)1。
4处理软件要求 (3)1。
5数据要求 (3)2数据处理操作流程 (4)2.1数据处理流程图 (4)2。
2空三加密 (4)2。
2.1启用软件FlightMatrix (4)2。
2.1。
1创建Flightmatrix工程42.2。
1。
2设置工程选项参数42。
2.1.3自动化处理 (7)2.2。
1.4DA TMatrix交互编辑 (8)2。
2.1.5调用PA TB进行平差解算 (9)2。
3生成DEM、DOM (10)2.4镶嵌成图 (10)2。
4。
1启用软件EPT (10)2。
4。
1.1导入MapMatrix工程生成DOM镶嵌工程122。
4。
1。
2编辑镶嵌线152.5图幅修补 (16)2。
6创建DLG,进行数字测图 (17)1产品特点1)空三加密1.可根据已有航飞POS信息自动建立航线、划分航带,也可手动划分航带。
2.完全摒弃传统航测提点和转点流程,可不依赖POS信息实现全自动快速提点和转点,匹配同影像旋偏角无关,克服了小数码影像排列不规则、俯仰角、旋偏角等特别大的缺点.即使是超过80%区域为水面覆盖,程序依旧能匹配出高重叠度的同名像点,整个测区连接强度高。
3.直接支持数码相机输出的JPG格式或TIF格式,无需格式转换。
4.无需影像预旋转,横排、纵排都可实现自动转点,节约数据准备时间.5.实现畸变改正参数化,方便用户修正畸变改正参数,不需要事先对影像做去畸变即可完成后续4D产品生产。
6.除无人机小数码影像外,还适用于其它航空影像。
7.空三加密支持无外业像控点模式,方便快速制作挂图,满足相关需求。
8.专门针对中国测绘科学研究院二维检校场和武汉大学遥感学院近景实验室三维检校场检校报告格式研发了傻瓜式批处理影像畸变差改正工具,格式对应,检校参数直接填入,无需转换,方便空三成果导入到其他航测软件进行后续处理。

用Cloud-AT进行空三数据处理流程讲义(软件系统为XP系统,同时建议计算机上安装ArcGIS、ERDAS、PhotoShop等常用图像处理软件及UltraEdit文本编辑软件)软件学习共分四个大步骤:(1)工程文件的制作:包括(一)(2)特征点提取:包括(二、三)(3)粗差点的剔除:包括(四、五、六、七)(4)DEM、DOM及拼接:包括(八、九、十)一、制作工程文件1、将经纬度转换高斯坐标工具操作步骤:(1)新建一个文本文件,把从飞控中传输下来的坐标信息中的纬度和经度复制到文件,(2)然后根据测区情况,填写中央经度,(3)点击批量转换,选择存有纬度和经度数据的文件,保存结果即可。
注意:默认的转换文件格式里只有两列:纬度经度。
2、Pos.ori(人工建立)POS_Normal20090912(日期) 0(文件头,不能随便改变)影像名称序号序号X Y Z omga phi kappaIMG_0696.JPG 696 696 38541484.5 2512765.4 683.1 6 4.1 172.3IMG_0697.JPG 697 697 38541373.2 2512749 681.9 7.6 5.9 172.1IMG_0698.JPG 698 698 38541262.8 2512731.2 685.2 4 7 172IMG_0699.JPG 699 699 38541146 2512713.9 687.4 4.5 4.7 172.2。
建立一个文本文件,后缀该为*ori,文件格式要按上述格式对照填写。
注意:a、Ori格式文件规定X方向朝东,即数学坐标系,用经纬度转直角坐标系的软件时,X,Y要互换,选择批量处理。
b、第三个kappa角,Ori文件是这样规定的:从西往东飞行,根据飞控数据加一个或减一个数值,使其接近0度;从南往北飞行,根据飞控数据加一个或减一个数值,使其接近90度;从东往西飞行,根据飞控数据加一个或减一个数值,使其接近180度;从东往西飞行,根据飞控数据加一个或减一个数值,使其接近270度;其余方向可根据实际飞行轨迹粗略估计出该角度(X正方向为0度,逆时针为正),根据飞控数据加一个或减一个数值,使其接近该度数。
航测内业软件简介•旧称Smart 3D ,ContextCapture是Acute3D公司的主打的具有突破传统摄影测量的软件产品。
能够处理手机、单反相机、激光雷达等多种数据源的数据,处理的模型效果在当今所有三维软件中也是名列前茅。
现在Acute3D公司已经被Bentley公司收购,从而实现了摄影测量、3D扫描、CAD建模技术的融合使用。
• ContextCapture软件主要由Master(主控制台)、Engine(任务启动引擎)、Viewer(三维模型展示)等组成。
处理数据时要注意,主控制台加载照片完成后,一定要打开Engine软件,才能开始数据处理。
•这款软件的建模优势有四点。
•第一,快速,简单,全自动。
前期输入需要处理的照片,设置好参数后便可完成空三加密,三维建模重建,DOM,DSM生成等工作。
•第二,三维模型效果逼真。
•第三,支持多种三维数据格式。
OSGB(Open Scene Graph Binary),Smart3D生成的三维模型格式,是由二进制存储的带有嵌入式链接纹理的数据(.jpg);OBJ,国际通用的标准3D模型格式,大部分三维软件都支持这种格式的三维数据,最初是由Alias|Wavefront公司开发。
•第四,支持多种数据源,包括固定翼无人机、载人飞机、旋翼无人机甚至手机数据都可以进行建模运算。
一、新建工程打开“ContextCapture Master”点击新建工程可以新建工程。
二、新建区块工程建好完毕后,需要新建区块或者导入区块,CC是将所有的项目以区块的形式处理的。
三、导入影像在区块中选择影像,然后添加影像,可以一张张影像的添加,也可以添加影像目录。
四、空三选择概要选项卡,然后点击右边的提交空中三角测量即可进行空三,在提交的时候需要设置好空三的各种角度参数。
四、空三设置空三的计算策略,相机内参、内外方位元素的计算评估办法即可提交。
四、空三提交完成空三后,打开ContextCapture Engine即可开始进行空三计算,这个时候可以关闭ContextCapture Master界面。
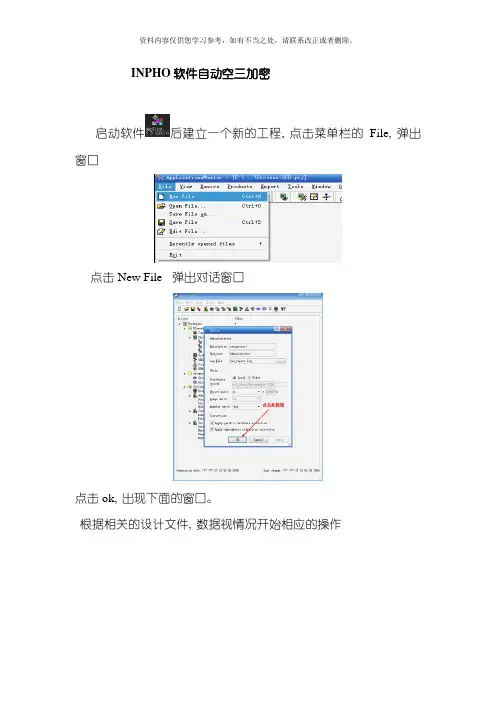
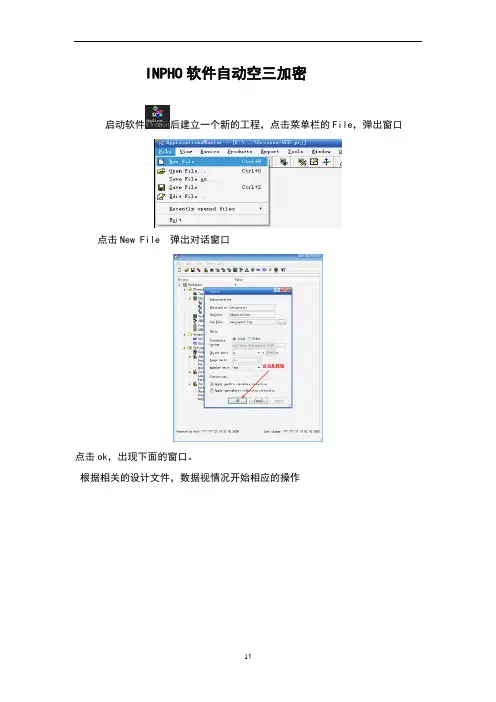
INPHO软件自动空三加密
启动软件后建立一个新的工程, 点击菜单栏的File, 弹出窗口
点击New File 弹出对话窗口
点击ok, 出现下面的窗口。
根据相关的设计文件, 数据视情况开始相应的操作
1.建立相机文件
双击1弹出下面的对话窗口
点击后弹出窗口
填写相应的相机名称、类型、镜头类型。
点击后, 弹出窗口
点击, 出窗口
根据相机的检校文件, 把相应的值填写到窗口中, 由于影像经过畸变差改正所在像主点的坐标值都给定零值, 点击
接着点击下图中的
到此相机文件就建好了。
2.导入影像数据
回到project editor界面, 双击Frame Type, 弹出对话框。
在对话框, 选择Import的第一个选项, 如下图。
matchat用户操作手册新建工程坐标系设置·针对框幅式数据:1(推荐使用)新建工程时使用本地坐标系,导入pos和控制点时也为本地坐标系要求在数据准备时将pos文件(注:通用坐标系转换软件即可,转换精度越高越好;若不同坐标系造成控制点预测点位与实地位置差太多,会出现自由网平差结果很好但绝对定向控制点被当成粗差情况)、控制点文件坐标转换至目标坐标系,经过inpho处理得到的结果即为目标坐标系成果2pos文件为非目标坐标系(经纬度)时:新建工程时,coordinate system指定目标坐标系,选择other,然后指定对应椭球及投影导入pos文件的时候,指定其输入坐标系(以pos为经纬度为例)同理,如果控制点文件非目标坐标系,也需要在其导入时指定输入坐标系(一般情况下,控制点文件均为目标坐标系成果,在导入时会按照新建工程时目标坐标系自动指定)·ADS系列数据(指经过Xpro处理的ADS40、80、100系列数据空三成果导入inpho)新建工程时,basics中选择other指定目标坐标系导入影像时指定对应sup文件,默认为空三成果为WGS84经纬度成果,不需要设置导入目标坐标系下控制点文件,作为检查空三成果是否恢复正确及空三精度的依据·卫星数据,同理ADS数据---basics中设置目标坐标系;导入rpc、rpb参数默认WGS84注:ADS、卫星数据要注意是否添加椭球定义变量新建工程之新椭球定义新的目标坐标系统可以由现有geographic systes和projected systems选项经椭球变换、投影变换及高程变换来定义1新椭球定义:选中基准椭球例如WGS84,然后copy系统自动生成编号,点击edit,进入编辑界面给重新定义的椭球命名;选择基于基准椭球的7参数方式(例如from或者to WGS84),并填写7参数:偏移量米为单位,旋转量为弧度秒,缩放量为ppm;以geoway软件计算的7参数为例,平移量取反,旋转量/3.1314926*180*3600,缩放偏量*10*6,值取反,填入对应项(其他软件计算的7参数可能会有正负号变化)2高程变换需要对高程精化文件(bin文件)进行格式转化,以globalmapper为例,转换步骤如下;然后将输出的文件放至文件夹C:\ProgramData\Trimble\GeoSpatial Geoids7.0下;inpho 椭球定义窗口对应下拉菜单即可进行选择注:如果没有水准精化文件,可以对椭球人为赋值高程改正,但是精度会有所损失注:如果利用两套控制点进行7参数计算,两套控制点高程已经做过高程转换,通过此7参数可以包含椭球变换和高程变化3投影变换Projected systems中选择对应的投影方式,copy双击进行编辑修改完毕,点击ok即可新建工程之相机文件设置相关一Inpho相机文件需要按照相机检教文件对应项输入·无人机数据以如下报告为例由于国内外针对无人机镜头采用不同的检教模型,所以国内无人机相机检教参数不能直接输入inpho,建议先去除畸变,使用去除畸变影像在inpho进行后序处理;此时主点偏移,畸变参数均为0;若是inpho空三成果用于DLG采集要导入三方软件中,如Mapmatrix中可以不用事先对影像进行旋转,如JX4需要把去除畸变的影像按照航带进行旋转保证相邻影像的像对关系正确,才能在Jx4中恢复正确立体分别输入焦距,像幅大小,像素大小等信息Inpho中输入主点偏移的时候可以选择像素单位或者mm单位;像素单位时国内检教一般为左下角为起算点,inpho设置有中心和左上角起算,所以像素单位检教文件推荐换算成mm单位后导入inpho。
⽆⼈机航⽚处理软件⼀、ERDAS LPS(Leica Photogrammetry Suite)是徕卡公司推出的遥感及摄影测量系统。
主要为处理地球空间影像提供了精密和⾯向⽣产的摄影测量⼯具。
LPS可以处理来⾃多种航天、航空传感器的多种格式影像,包括⿊/⽩、彩⾊和最⾼⾄16bits的多光谱等各类数字影像。
ss⼆、DPGRID新⼀代数字摄影测量⽹格数字摄影测量⽹格(Digital Thotogrammetry Grid--DPGrid)是由中国⼯程院院⼠、武汉⼤学教授张祖勋提出。
DPGrid数字摄影测量⽹格系统打破传统的摄影测量流程,集⽣产、质量检测、管理为⼀体,合理地安排⼈、机的⼯作,充分应⽤当前先进的数字影像匹配、⾼性能并⾏计算、海量存储与⽹络通讯等技术,实现航空航天遥感数据的⾃动快速处理和空间信息的快速获取,其性能远远⾼于当前的数字摄影测量⼯作站,能够满⾜三维空间信息快速采集与更新的需要,实现为国民经济各部门与社会各⽅⾯提供具有很强现势性的三维空间信息。
2007年7⽉12⽇,该产品通过国家鉴定,鉴定结论:“该系统研究思想新颖、研究成果先进,将为数字摄影测量的新⼀轮跨越式发展、为建⽴⼤规模的摄影测量数据处理中⼼和三线阵卫星影像的快速处理奠定基础。
该系统整体上达到国际先进⽔平,其中数字摄影测量⽹格DPGrid并⾏处理技术、影像匹配技术和⽹络全⽆缝测图技术达到国际领先⽔平”。
新⼀代航空航天数字摄影测量处理平台DPGrid,填补了我国数字摄影测量数据处理技术的空⽩,标志着我国数字摄影测量技术整体上达到国际先进⽔平。
具有⾃主版权的⾼性能新⼀代航空航天数字摄影测量处理平台DPGrid,可以推⼴应⽤于国家基础测绘、城市基础地理信息动态更新、国⼟资源调查、⽣态环境监测、灾害监测、海洋资源、农业监测、快速响应等各个领域,⼤幅度地提⾼航空航天遥感影像数据处理的效率,缩短地图更新周期,提⾼空间信息获取的实时性,特别是对⼤型的⾃然灾害的快速评估、应急反映的⽅⾯,对于我国的社会经济发展以及军事安全等都具有重要的意义。
空三加密作业过程指导-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII空三加密作业过程指导一、资料分析1、弄清航片所构成加密区域的情况:航线数量,每条航线的航片数量,航线旁向航向的重叠度,航线跳接等情况。
2、航片的内容:观察每张航片是否有阴影,云层。
纹理的复杂单调与否。
如有云层,要查明是否有补飞的航片。
如阴影太大,纹理单调,空三量测要考虑手工加点。
3、检查控制点的分布情况,要覆盖整个加密测区,在拟定好的区域内是否满足立体观测的要求。
二、数据准备1、航片的数据转换:旋转颠倒的航片成正向,检查四角框标的可量测性与否,航片数据格式转换,排列航片构成作业区域。
2、制作相机文件。
3、制作控制点文件。
4、建立测区,按加密软件的要求输入信息,将上面准备的数据组织成工作目录。
三、空三量测1、内定向。
2、手工选择航线偏移点。
3、动相对定向,自动模型连接,自动航线连接,自动选择加密点。
4、手工干预。
在上面的自动过程中如有失败的要进行手工操作。
检查自动选择的加密点是否均匀覆盖测区,在缺点或点稀少的标准点位上量测一些点。
5、控制点及检查点量测。
6、接边点的量测。
四、空三平差利用空三平差程序对上一步骤的数据进行计算,依据相应规范的限差迭代修改下列三项超限的点,直至满足要求。
1、点的观测精度,主要修改点的上下视差。
2、控制精度,修正控制点的误差。
3、接边精度,修正接边点的误差。
以上过程需反复趋近。
五、成果整理1、完整性。
2、易读性。
前言Inpho 摄影测量系统包括空中三角测量,三维立体编排,地形建模,正射影像处理和图像获取等。
为了方便4D产品的生产,特编写本指导书,结合自己经验和参考手册。
许多内容通过翻译,欠妥之处,还请指正。
本书着重介绍1.1.MATCH-AT 自动空三加密S S T T E E P P11新建工程,需要以下几个数据:数字影像相机文件外方位元素初始值外业控制资料(控制点成果和刺点片)工作内容•指定项目名称•载入近似中心(GPS、INS)•载入图像•确定单位,像素大小,照相机的名称和mount rotation,地形高度•自动设定块打开Match-AT,点击,下拉点击弹出对话窗①输入工程名和存储路径②导入航片初始坐标,即根据航摄索引图等初设概略航片坐标。
格式如下2750 388000 5000000 3000 /航片号 X坐标 Y坐标 Z坐标2749 389000 5000000 30002748 390000 5000000 3000# /航带分隔符2779 360000 4997000 30002780 361000 4997000 30002781 362000 4997000 3000#…………#如果是GPS辅助摄影,按# Strip 1759 539286.802 335214.655 1774.851 -1.8738 -0.3952 -3.4960760 539839.899 335206.408 1782.623 -1.5935 -0.3668 -3.4721761 540439.471 335192.804 1783.540 0.2288 0.8253 -3.7421# Strip 2... ... ...顺序导入,航带之间用“#”隔开。
③导入航片影像,可按目录和单片加入。
表示已经加入,表示影像还没有加入,注意航片初始坐标航片号与影像的对应。
④输入其他参数MOUNT ROTATION这个参数定义的旋转图像坐标系统对飞行方向。
测绘与空间地理信息GEOMATICS & SPATIAL INFORMATION TECHNOLOGY第44卷第1期2021年1月Vol.44,No.1Jan.,2021基于多种软件进行无人机数据空三加密处理方法的探讨陈颖(福建省地质测绘院,福建福州350011)摘要:随着无人机在测绘行业的广泛利用与推广,快速便捷处理无人机数据成为研究热点。
本文以无人机数据的空三加密处理为主,介绍了 PhotoScan 、1NPHO 、SVSUAV 三种软件的无人机数据处理的流程及其优缺点,提出 了利用各软件优点与数据兼容特点,结合不同软件平台进行无人机数据空三加密处理,提升了空三加密整体精 度,并为后续的DLC 、DEM 、DOM 的生产提供精度达标的基础数据。
关键词:无人机数据;空三加密;PhotoScan ;1NPHO ; SVSUAV 中图分类号:P231文献标识码:A 文章编号:1672-5867( 2021) 01-0173-03Discussion on Processing Methods of Aerial Triangulation forUAV Images Based on Multiple Software PlatformsCHEN Ying(Fujian Geological Surveying and Mapping Institute , Fuzhou 350011, China )Abstract :With the wide use and promotion of UAV in surveying and mapping industry, the rapid and convenient processing of UAVdata has become a research hotspot. This paper mainly focuses on aerial triangulation method of UAV, introduces advantages and dis advantages in the data aerial triangulation processing flow by using PhotoScan , 1NPHO , and SVSUAV. Based on different software platforms, it improves the accuracy of aerial triangulation and provides basic data for the subsequent production of DLG, DEM,and DOM.Key words : UAV data ; aerial triangulation ; PhotoScan ; 1NPHO 0引言无人机航测系统与传统测绘相比,具有使用成本低、机动灵活、载荷多样性、用途广泛、操作简单、安全可靠、 高效快速等优点,在航测制图、灾害应急、安全执法、农林 监测、水利防汛、电力巡线、海洋环境、高校科研等行业中发挥着越来越多的作用[1-4]。
第36卷第1期2020年3月测绘标准化Sondardization of Serveying and MappingVci.36No1Myr.2020基于Iipho的空三加密方法王伟丽(自然资源部第一航测遥感院陕西西安74054)On Aeriai Trianrulation with InphoWANG WPin摘要:针对在A p P c软件下,大中比例尺地形图测图空三加密的模型定向残差问题,探讨借助Apho和软件的优势,有效结合软件进行质量控制,快速完成空三加密的方法。
这种方法不仅能弥补资源不足,还能提高空三加密工作的效率。
关键词:空三加密;单模型绝对定向;A p C j;MapMatOo;:Aeeat Tnangulation;Singte Monet ACsolutOy Oneetation;A p C c;MapMatOo中图法分类号:P231A p C j的空三功能模块MATCH-AT是高端航测软件中的经典°A p C j是基于特征和最小二乘法组合来完成连接点的匹配,通过交叉的多重连接点的连接以及像片间的条带间的连接,使连接点匹配达到了0.1个像元的精度,具有较强的连接点匹配能力和高精度的点位预测能力。
A p P c在空三加密方面虽然自动化程度高,但其立体测图功能在国内众多软件中不占优势,需要使用空三数据在测图软件中建立立体模型。
航天远景的MapMatOo能快速恢复立体模型,计算模型连接点和控制点的单模型绝对定向残差,再根据绝对定向残差结果在A p P c软件中调整模型连接点和控制点,从而保证空三加密的精度,为后续工序的数据采集工作提供可靠性。
本文探讨了在A p P c软件下,针对大中比例尺地形图测图空三加密中单模型定向的残差问题,借助MapMatOo软件进行单模型绝对定向的质量控,完成空加密的方°1I+pho空三加密技术流程1-1数据准备需要准备的数据有数码影像、像机文件、POS数据和像控点成°1.2影像预处理在ApplicotionMaster主界面的主菜单Basics下选择Image Commander,添加影像,生成影像金字塔°1.3建立工程打开ApplicationMaster主界面,创建工程。