并联机床的发展现状与展望_陈文家
- 格式:pdf
- 大小:193.22 KB
- 文档页数:5
并联机床的研究现状和发展前景姓名:闫培如班级:机械1301班学号:S2*******二零一四年五月二十八并联机床的研究现状和发展前景并联机床,又称为虚拟轴机床或并联运动学机器,是并联机器人技术和现代数控技术相结合的产物。
它能够提供机器人的灵活与柔性,又具有机床的刚度和精度,是集多种功能与一体的新型机电设备。
从传动链角度来说,并联机床与传动串联机床的区别在于:串联机床一般是由底座、立柱、主轴箱和工作台等构件构成的“C”型结构,负载力全面地由一级传动构件传向下一级,每个传动链的构件都要固定机床的全部自由度,都要承受工作负载的全部力流,包括力和力矩,这样,为了满足机床的刚度和强度要求,构件的质量不可避免的增大,不但增加了材料和能源的消耗,而且制约了进给速度和加速度的提高。
而并联机床的工作台是由多个传动链联合控制自由度,一方面通过避免横向力矩作用,另一方面,将工作负载均衡的分担到了六个伸缩杆上,极大的减轻的伸缩杆的工作负载,伸缩杆只需很小的尺寸便可满足刚度和强度要求。
不但减轻了机床整体的质量,使得大幅度提高机床的进给速度和加速度成为可能,而且提高了机床刚度,对提高加工精度起到有利的一面。
并联机床特性分析1 并联机床优点:因为结构等原因,与实现同等功能的传统机床相比,并联机床具有如下优点:(1) 刚度重量比大,因采用并联闭环静定或非静定杆系结构,且在准静态情况下,由于伸缩杆与动平台和静平台之间使用万向联轴节(或球铰)相连,不存在横向力矩的作用,因此,传动构件理论上为仅受拉压载荷的二力杆,故传动机构的单位重量具有很高的承载能力。
(2) 响应速度快,运动部件惯性的大幅度降低有效地改善了伺服控制器的动态品质,允许动平台获得很高的进给速度和加速度,因而特别适用于各种高速数控作业。
(3) 精度高,并联机床由并联机构组成,各杆的杆长都单独对主轴的位置和姿态起作用,因而它不存在传统机床中串联机构的误差累积问题,从而其加工精度较高。
摘要随着信息技术的进步和全球化制造技术的进步,企业为了提高自身的竞争力,要求配置效率更高成本更低的加工设备,而传统机床在未来的加工业中会遇到难以克服的困难,例如在高速加工中(轨迹速度达到50m/min)和高效空间曲面加工及机床的通用性方面将无法满足现代加工技术的要求。
因此探索和研究一种现代化机床具有十分重要的意义。
虚拟轴机床与传统的串联式数控机床相比具有很多优越性。
传统数控机床各自由度是串联相接的,呈悬臂结构,且层叠嵌套致使传动链长,传动系统复杂,累计误差大,而精度低,成本昂贵,至今多数机床只是4轴联动,极少5轴。
而虚拟轴机床的并联式加工中心结构特别简单,传动链极短,刚度大、质量轻、切削效率高、响应快,特别是很容易实现六轴联动,因而,能加工更复杂的三维曲面,且其加工精度和加工粗糙度都直接由控制程序来保证,因此,硬件成本低,而软件附加值高,是一种技术附加值极高的机电一体化产品。
此研究课题针对现今的机加工趋向,制定了设计一部并联机床实验台的任务,作者与合作人共同设计。
其中的并联部分分配给了合作者,作者主要负责并联机床实验台的总体框架结构设计。
平台大致由并联机构——三根并联丝杠(驱动电机)、铸铁机架、装卡平台和电主轴以及弹簧铣夹头组成。
关键词:并联机构、虚轴加工、雅可比矩阵、正解算法AbstractWith the progress of the information technology and the development of the global manufacturing techniques, enterprises require more efficient and lower cost machines by reason of enhancing their competitive ability. But conventional machine tools will encounter many difficulties which are hard to overcome in the future, for instance of high-speed machining ( path speed exceeding 50m/min)and high efficient space curved surfacing machining as well as flexibility of machines. Thus, it is very important to explore and study kind of modern machines.Be compared to the normal numerical control machine tool, it has larger rigidity, stronger carrying capacity, smaller error, higher precision, smaller ratio of self-weight and load, better dynamical capacity, less investment of hardware, but stronger function of software. All of these show its high additional technical valve.This research topic for the current trend of the processing machine, developed a design of a parallel machine test-bed task, which the Author co-design and a partner. Some of them parallel to the allocation of the partner, the author mainly responsible for the PMT test-bed framework of the overall structural design.Platform from roughly parallel bodies - three parallel screw (motor driven), cast iron rack, with card platform and Spindle and milling chucks of spring.Key words:parallel instruction, virtual axis processing, Jacobian Matrix, positive solution algorithm目录第1章绪论 (1)1.1课题背景与意义 (1)1.2并联机床发展历史及现状 (2)1.3本文主要研究内容 (5)第2章重要零部件选型 (6)2.1依照主轴功率确定电主轴型号 (6)2.2选择主轴下部刀具夹头 (7)2.3选择工件的装卡方式 (8)第3章实验台支承部分及其连接的方案 (11)3.1机架的设计方案 (11)3.2铸造机架的材料及热处理 (14)3.3机架的截面形状、壁厚及周边筋的布置 (14)3.4立柱与底座的连接方式 (16)3.5底座的造型 (16)第4章实验台驱动电路 (17)4.1电路布线方案 (17)4.2电路控制要求 (17)4.3电路控制连线原理图 (17)第5章实验结果及三维建模 (18)5.1设计并联实验台结果 (18)5.2实验台SOLIDWORKS建模 (18)第6章总结与展望 (19)参考文献 (20)致谢 (20)第1章绪论1.1课题背景与意义为了提高对生产环境的适应性,满足快速多变的市场需求,近年来全球机床制造业都在积极探索和研制新型多功能的制造装备与系统,其中在机床结构技术上的突破性进展当属90年代中期问世的并联机床(ParallelMachineTool),又称虚(拟)轴机床(VirtualAxisMachineTool)或并联运动学机器(ParallelKinematicsMachine)。
并联机床的最新发展趋势摘要:并联机床是上世纪90年代发展起来的新型机床,其集成了机床技术、机器人技术与现代数控技术于一身的新一代加工设备。
同传统的数控机床相比,并联机床具有刚度重量比大、响应速度快以及环境适应能力强以及技术附加值高等优点,具有十分广阔的市场应用前景。
本文主要介绍的为并联机床的起源、发展以及优势,同时分析了并联机床的国内外发展现状与应用领域。
关键词:并联机床机器人现代数控响应速度Research status and latest development trend of parallelmachine tool at home and abroadAbstract: parallel machine tool is a new type of machine tool developed in the 90's of last century, which integrates the technology of machine tool, robot technology and modern numerical control technology in a new generation of processing equipment. Compared with traditional CNC machine tools, parallel machine tool has the advantages of high stiffness weight ratio, fast response speed, strong adaptability to environment and high technology added value, and has a very broad market prospects. This paper mainly introduces the origin, development and advantages of parallel machine tool, and analyzes the development status and application field of parallel machine tool at home and abroad.Key words: parallel machine tool robot modern numerical control response speed1并联机床的发展并联机床又被叫做并联结构机床、虚拟轴机床等也被叫做六条腿机床,在国际上面一般叫做Parallel Kinematic Machine(PKM),其是通过Stewart平台为基础的。
2024年机床市场发展现状1. 市场概述机床是制造业中使用最广泛的设备之一,在各个行业中都起到至关重要的作用。
随着制造业的发展,机床市场也得到了快速增长。
本文将对机床市场的发展现状进行分析和讨论。
2. 市场规模和趋势机床市场的规模和趋势是了解其发展现状的重要指标。
根据市场研究数据,近年来机床市场持续增长,规模不断扩大。
这主要归因于制造业的快速发展和需求的增加。
预计未来几年,机床市场将继续保持良好的增长趋势。
3. 市场驱动因素分析机床市场的发展受多种因素的影响。
以下是几个主要的市场驱动因素:•制造业需求:随着制造业的快速发展,对机床的需求也不断增加。
制造业的增长会推动机床市场的发展。
•技术创新:新技术的引入使机床性能得到提升,同时也增加了机床的需求。
技术创新是机床市场发展的重要推动力。
•政策支持:政府对制造业的支持和鼓励也对机床市场的发展起到了积极的作用。
政策支持可以促进制造业的发展,从而推动机床市场的壮大。
4. 市场竞争分析机床市场竞争激烈,主要来自于国内外的制造商。
领先的机床制造商通过技术创新和质量保证来增强竞争力。
同时,价格竞争也是市场竞争的一部分。
由于机床市场的规模巨大,竞争格局相对稳定。
5. 市场前景和挑战机床市场的前景广阔,随着制造业的不断发展,机床的需求将持续增加。
同时,技术的进步也将为机床市场带来新的机遇。
然而,市场也面临一些挑战,如价格压力、环保要求等。
应对这些挑战,制造商需要不断提升技术水平并改进产品性能。
结论机床市场在制造业中具有重要的地位,发展潜力巨大。
市场规模持续扩大,市场竞争激烈。
制造业需求、技术创新和政策支持是市场发展的主要驱动因素。
未来,机床市场将继续保持良好的增长态势,同时也面临一些挑战。
制造商应积极应对挑战,不断提升产品质量和技术水平,以赢得市场竞争。
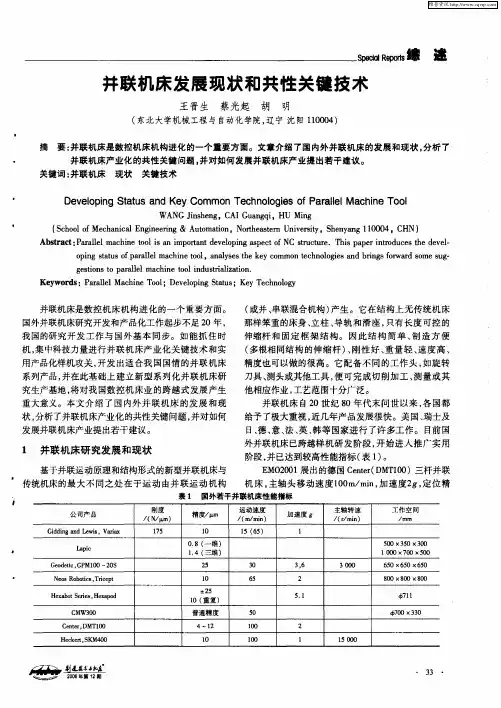
并联机床发展现状和关键技术
并联机床是机械制造行业中应用最广的自动化装备之一,它是通过机械元件和控制电子器件实现机器储存和控制制造途径,从而使成型机械零件实现自动化制造的装备。
随着工业自动化水平的不断提高和社会经济的发展,并联机床的发展也取得了很大成就,越来越多的企业选择使用并联机床,为工业生产的效率和质量带来了巨大提升。
一、并联机床发展现状
随着我国工业自动化程度的提高,自动化设备,特别是并联机床,也受到了市场的广泛认可。
自从20世纪90年代以来,并联机床的发展就呈现出爆炸式增长的趋势,特别是近年来,随着国家财政投入不断加大,技术的突破与改进,并联机床的研发实现了长足进步,形成了一定的产业基础,成熟的市场应用和完善的产业链链条,推动了并联机床的发展朝正向发展。
目前,并联机床技术已经发展到具有一定水平,大型企业拥有了一定规模的并联机床产品和相关技术,中型企业也可以根据市场需求开发相应的并联机床产品。
同时,中小企业也涌现出许多利用低成本较为可行的解决方案,在一些领域具有不可替代的优势。
二、并联机床关键技术
1.节能技术
随着能源逐渐供不应求。

并联机床研究现状与展望杨建新,郁鼎文,王立平,汪劲松(清华大学精密仪器与机械学系,北京 100084)摘要:并联机床作为机床技术和机器人技术相结合的产物,与传统结构机床相比具有很多的优点。
简要介绍了目前国内外并联机床的发展现状和未来趋势,以及关键技术的研究进展,提出了发展并联机床需要解决的若干理论与技术问题,以及解决这些问题的可行途径。
关键词:并联机床;机构设计;运动学;数控技术;动力学中图分类号:TH112 文献标识码:A 文章编号:1007-9483(2002)03-00010-03Progress in the R esearch of Parallel Machine ToolYAN G Jian-xin,YU Ding-wen,Wang Li-ping,Wang Jin-song(Tsinghua University,Beijing,100084,China)Abstract:As the result of synthesizing machine tools with robot technology,parallel machine tools have many advantages compared as the classical ones.This paper briefly introduces the future prospective of parallel machine tools,points out some key issues that should be tackled for design and manufacture.K ey w ords:Parallel Machine Tools;Mechanism Design;K inematics;NC Technology;Dynamics 并联机床自20世纪90年代中期问世以来,不过数年时间,便以迅猛的速度向前发展[1]。
毕业设计(论文)开题报告题目:六自由度并联机床结构设计与分析专业机械电子工程学生指导教师日期1.课题背景及研究的目的和意义1.1课题背景并联机器人具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,已广泛应用于工业、航天、航海、医疗、娱乐等领域,与目前广泛应用的串联机器人在应用上构成互补关系,因而扩大了整个机器人的应用领域。
由于其卓越的优点及巨大的潜在应用前景,并联机器人的理论及应用研究受到了国内外学者的重视,在过去几十年取得了长远的发展。
并联机床作为机床技术和机器人技术相结合的产物,与传统结构机床相比具有很多的优点,展现出广阔的发展和应用前景。
传统机床中,驱动刀具与工件作相对运动的进给轴按照笛卡尔坐标布置,为串联、开链结构。
为了实现5轴加工,需在传统的3轴机床上再增加两个轴来控制刀具的姿态,所有这些轴都按串联结构布置。
当一个轴运动时,需带动串联运动链上后面的所有轴一起运动,因此其运动惯性大,动态性能较差。
同时,产生的切削力沿开链传递,使每一部件的缺陷都会对切削精度产生影响。
基于并联机器人开发的并联机床,由于其运动平台由几个简单的串联运动链并行驱动,与传统串联结构的机床相比,具有如下优点:(1)并联机床刚度大,结构稳定,承载能力强。
上下平台之间由六根杆支撑,形成并联闭环静定结构,传动构件理论上仅为受拉、压载荷的二力杆,故传动机构的单位重量具有很高的承载能力。
(2)并联机床没有误差的累积和放大(串联式末端误差是各关节的积累和放大)所以可以达到更高的加工精度。
(3)并联机床移动部件质量小,运动灵活,响应速度快,动态性能好,易于实现空间复杂曲面加工,适合于高速加工。
(4)并联机床正解困难反解容易,而机器人在线实时计算是要计算反解的,故轨迹规划简单,易于实现控制。
(5)并联机床结构简单,零件总数较少,成本容易控制,集成化、模块化程度高,使得并联机床结构设计和加工多方面得以简化。
毕业设计(论文)开题报告题目:六自由度并联机床结构设计与分析专业机械电子工程学生指导教师日期1.课题背景及研究的目的和意义1.1课题背景并联机器人具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,已广泛应用于工业、航天、航海、医疗、娱乐等领域,与目前广泛应用的串联机器人在应用上构成互补关系,因而扩大了整个机器人的应用领域。
由于其卓越的优点及巨大的潜在应用前景,并联机器人的理论及应用研究受到了国内外学者的重视,在过去几十年取得了长远的发展。
并联机床作为机床技术和机器人技术相结合的产物,与传统结构机床相比具有很多的优点,展现出广阔的发展和应用前景。
传统机床中,驱动刀具与工件作相对运动的进给轴按照笛卡尔坐标布置,为串联、开链结构。
为了实现5轴加工,需在传统的3轴机床上再增加两个轴来控制刀具的姿态,所有这些轴都按串联结构布置。
当一个轴运动时,需带动串联运动链上后面的所有轴一起运动,因此其运动惯性大,动态性能较差。
同时,产生的切削力沿开链传递,使每一部件的缺陷都会对切削精度产生影响。
基于并联机器人开发的并联机床,由于其运动平台由几个简单的串联运动链并行驱动,与传统串联结构的机床相比,具有如下优点:(1)并联机床刚度大,结构稳定,承载能力强。
上下平台之间由六根杆支撑,形成并联闭环静定结构,传动构件理论上仅为受拉、压载荷的二力杆,故传动机构的单位重量具有很高的承载能力。
(2)并联机床没有误差的累积和放大(串联式末端误差是各关节的积累和放大)所以可以达到更高的加工精度。
(3)并联机床移动部件质量小,运动灵活,响应速度快,动态性能好,易于实现空间复杂曲面加工,适合于高速加工。
(4)并联机床正解困难反解容易,而机器人在线实时计算是要计算反解的,故轨迹规划简单,易于实现控制。
(5)并联机床结构简单,零件总数较少,成本容易控制,集成化、模块化程度高,使得并联机床结构设计和加工多方面得以简化。
机床产业发展情况、面临的困难问题及有关建议一、机床产业发展情况机床产业在我国制造业中占有举足轻重的地位,是技术创新和制造业升级的关键领域。
近年来,我国机床产业获得了较快的发展,不断提升了生产技术和产业规模。
1、产值不断增长据有关数据显示,2019年我国机床产业实现总产值达到1.03万亿元,同比增长5.7%。
其中,数控机床、高端智能装备制造、激光加工等领域成为机床产业发展的新动力。
2、品牌竞争加剧随着国内外企业的加入,机床产业品牌竞争愈发激烈,产品的性能和质量也在不断提升。
在国际市场上,我国机床品牌也已逐渐获得广泛认可。
3、技术创新成为核心竞争力在技术方面,我国机床产业近年来加快了自主创新的步伐,设立了多家国家级机床研发机构,并建立了技术创新联盟。
这不仅加速了我国机床行业的发展,同时也提高了我国企业的竞争力。
二、面临的困难问题尽管机床产业发展较快,但其面临的困难和挑战也不容忽视。
1、产业结构不适应市场需求由于我国机床产业在过去主要依赖出口,进入国内市场的机床品种和型号较少,与国外企业相比,存在不小的差距。
2、企业缺乏核心技术机床产业涉及机械、电子、自动化等多个领域,需要强大的综合实力支持。
但是不少企业缺乏核心技术,面临生产技术和产品质量等方面的问题。
3、行业发展缺乏社会关注机床产业虽然在各个领域占据重要位置,但一些关键问题却未能得到足够的社会关注。
这包括环境污染、劳动安全、产品质量等方面的问题。
三、有关建议为解决机床产业面临的问题,有关部门和社会各界可以采取以下措施:1、优化产业结构和布局,提高综合实力。
针对机床产业结构不适应市场需求的问题,需要合理调整产业结构和布局,同时提高机床企业的技术水平,推动机械工业实现高质量发展。
2、加大科技投入,促进技术创新。
加强对机床产业的科技支持,提高机床企业的自主创新能力,加强技术交流与合作。
3、创造有利的政策环境,支持企业发展。
加强政策宣传,推出有利于机床企业发展的政策和支持措施,提高机床企业吸引投资的能力。
当前机床产业发展情况、面临的困难问题及有关建议当前机床产业发展情况:机床产业作为制造业的基础性产业之一,在国民经济中具有重要地位。
随着国内经济的快速发展,机床产业也经历了多年的高速增长,逐步实现了由量到质的转变。
目前,中国机床制造技术和装备水平已经有了很大的提高,尤其在高档、精密、复杂机床方面,国内厂商已经能够生产出一些国际水平的产品。
此外,高端数控、机器人、模具等新兴制造业也为机床产业带来了巨大的发展机遇。
面临的困难问题:1.市场竞争激烈:机床产业市场竞争激烈,尤其是国际市场上的竞争,例如日本、德国等机床强国的竞争优势,给国内机床企业带来了很大的压力。
2.技术升级缓慢:虽然国内机床制造技术和装备水平已经有了很大提高,但与国际先进水平相比,还存在一定差距。
同时,机床企业在技术创新方面投入不足,难以快速跟上市场需求和行业发展趋势。
3.企业生产松散:我国机床行业规模庞大,但企业数量众多,企业之间生产规模与产业链缺乏深度合作,导致产能过剩严重,挤压了行业内企业的盈利空间。
4.行业人才不足:机床行业迫切需要一批高水平的人才,来推动行业技术创新和高质量发展。
然而,机床行业人才短缺问题十分突出,儒商结构不合理,人才流失严重,难以满足行业发展需求。
有关建议:1.提升技术水平:加大技术研究力度,加强科技创新和自主创新,在关键配套件技术和体系集成方面加强投入,缩小与国外机床产品的差距,满足市场需求和行业发展趋势。
2.加强企业合作:通过与配套企业和上下游企业的合作,制定共同研发、生产和销售计划,形成供应链整合和协同发展的新模式,提高产业创新和协作能力。
3.优化产业结构:加强产业整合,推动机床行业向技术密集型和高端化方向发展,优化产业结构,形成规模效应和适当的行业集中度。
4.加强人才培养:加大行业人才的培养和引进力度,重视实践能力和创新精神的培养,加强与高校的合作,共同培养高水平人才,满足行业发展需求。
总之,机床行业要发挥自身优势,大力推进产业升级,在技术、产能、人才、市场等方面进行全面研究和协同创新,不断增强产业核心竞争力,推动行业迈向高质量发展。
并联机器人行业市场现状分析及未来三到五年发展趋势报告As an AI language model, I can provide a detailed analysis of the current state and future development trends of the parallel robot industry market.The parallel robot industry has been experiencing steady growth in recent years. The market for parallel robots is driven by factors such as increasing demand for automation in various industries, advancements in technology, and the need for high-speed and precision operations.One major trend in the industry is the integration of parallel robots with advanced technologies such as artificial intelligence, machine learning, and IoT. This integration has enhanced the capabilities and applications of parallel robots in industries such as manufacturing, automotive, electronics, and pharmaceuticals.The future of the parallel robot industry looks promising, with a projected growth rate of 7 to 10 over the next three tofive years. This growth can be attributed to the increasing adoption of parallel robots in emerging economies, the development of new and innovative parallel robot designs, and the rising demand for automation across various industries.Additionally, the expansion of e-commerce and the need for efficient and flexible logistics solutions are expected to drive the demand for parallel robots in warehousing and fulfillment operations. The integration of parallel robots with autonomous systems and collaborative robots is also anticipated to open new opportunities for the industry.Overall, the parallel robot industry is poised for significant growth in the coming years, driven by technological advancements, increasing automation, and the need forhigh-speed and precision operations across various sectors.并联机器人行业市场现状分析及未来三到五年发展趋势报告并联机器人行业近年来一直在稳步增长。
并联机器人发展现状与展望引言并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。
本文根据掌握的大量并联机器人文献,对其分类和应用做了简要分析和概括,并对其在运动学、动力学、机构性能分析等方面的主要研究成果、进展以及尚未解决的问题进行了阐述。
1并联机构的发展概况(一)并联机构的特点并联机构是一种闭环机构,其动平台或称末端执行器通过至少2个独立的运动链与机架相联接,必备的要素如下:①末端执行器必须具有运动自由度;②这种末端执行器通过几个相互关联的运动链或分支与机架相联接;③每个分支或运动链由惟一的移动副或转动副驱动。
与传统的串联机构相比,并联机构的零部件数目较串联构造平台大幅减少,主要由滚珠丝杠、伸缩杆件、滑块构件、虎克铰、球铰、伺服电机等通用组件组成。
这些通用组件可由专门厂家生产,因而其制造和库存备件成本比相同功能的传统机构低得多,容易组装和模块化。
除了在结构上的优点,并联机构在实际应用中更是有串联机构不可比拟的优势。
其主要优点如下:(1)刚度质量比大。
因采用并联闭环杆系,杆系理论上只承受拉、压载荷,是典型的二力杆,并且多杆受力,使得传动机构具有很高的承载强度。
(2)动态性能优越。
运动部件质量轻,惯性低,可有效改善伺服控制器的动态性能,使动平台获得很高的进给速度与加速度,适于高速数控作业。
(3)运动精度高。
这是与传统串联机构相比而言的,传统串联机构的加工误差是各个关节的误差积累,而并联机构各个关节的误差可以相互抵消、相互弥补,因此,并联机构是未来机床的发展方向。
(4)多功能灵活性强。
可构成形式多样的布局和自由度组合,在动平台上安装刀具进行多坐标铣、磨、钻、特种曲面加工等,也可安装夹具进行复杂的空间装配,适应性强,是柔性化的理想机构。
(5)使用寿命长。
由于受力结构合理,运动部件磨损小,且没有导轨,不存在铁屑或冷却液进入导轨内部而导致其划伤、磨损或锈蚀现象。
收稿日期:2001-06-06作者简介:陈文家(1962-),男,江苏扬州人,中国科学院沈阳自动化研究所博士研究生。
研究方向:机器人学、并联机床。
并联机床的发展现状与展望陈文家,王洪光,房立金,赵明扬(中国科学院机器人学开放研究实验室,辽宁沈阳 110015)摘 要:论述并联机床的发展现状及与传统机床的区别。
在对国内外典型并联机床样机的工作原理分析的基础上,指出目前并联机床研究中所面临的主要问题,并对并联机床的研究发展方向进行了展望。
关 键 词:并联机床;发展现状;展望中图分类号:TG5 文献标识码:A 文章编号:1001-4551(2001)04-0005-05The State -of -The -Art and Prospects of Parallel Machine Tools CHE N Wen -jia ,WANG Hong -guang ,FANG Li -jin ,ZHAO Ming -yang(Open research lab of Robo t ,Chinese Academy of sciences ,Shengyang 110015,China )A bstract :In this paper ,the state -of -the -art of parallel machine tools and their difference from conventional machine tool are briefly addressed .On the basis of analysis and discussion on working theory about several kinds of parallel machine tool proto -types ,the main problems on development of parallel machine tool are mentioned ,in the mean while ,the further development trend are discussed .Key words :Parallel Machine Tool ;the state -of -the -art ;prospects图1 典型的并联机床原理简图1 引 言并联机床(亦称6(3)条腿机床、虚轴机床)是90年代中期问世的一种新型数控加工装备,其基本特征是安装工具的动平台由多个支路联接到固定平台,通过这些支路上的作动器(主动副)驱动动平台运动以改变工具在空间的位置和姿态,从而实现工具相对工件的进给运动,如图1示。
并联机床实质上是并联机器人技术与机床技术相结合的产物,它与传统结构形式的数控机床相比具有许多优点。
传统机床中,驱动刀具与工件作相对运动的进给轴按照笛卡尔坐标布置,为串联、开链结构。
为了实现5轴加工,需在传统的3轴机床上再增加两个轴来控制刀具的姿态,所有这些轴都按串联结构布置。
当一个轴运动时,需带动串联运动链上后面的所有轴一起运动,因此其运动惯性大,动态性能较差。
同时,产生的切削力沿开链传递,使每一部件的缺陷都会对切削精度产生影响。
这种机床的优点是各轴运动相互独立,运动控制比较简单。
基于并联机器人开发的并联机床,由于其运动平台由几个简单的串联运动链并行驱动,与传统串联结构的机床相比,具有如下优点[1]:(1)系统刚度重量比大。
因采用并联、闭链杆系结构,在准静态情况下传动构件理论上为仅受拉、压载荷的二力杆,故传动机构的单位重量具有很高的承载能力;(2)响应速度快。
运动部件惯性的大幅度降低有效地改善了伺服控制器的动态品质,允许动平台获得很高的进给速度和加速度,因而特别适合于各种高速数控作业;(3)机械本体的体积精度较高。
各关节误差能够相互抵消一部分,而串联结构机床各关节的误差是积累的;(4)环境适应性强。
易于可重构和模块化设计,可构成形式多样的布局和自由度组合;(5)技术附加值高。
并联机床具有”硬件”简单、”软件”复杂的特点,是一种技术附加值很高的机电一体化产品。
因此,并联机床是一种具有良好应用前景的新一代制造装备。
2 并联机床的发展现状国内外学术界和工程界对研究和开发并联机床都非常重视。
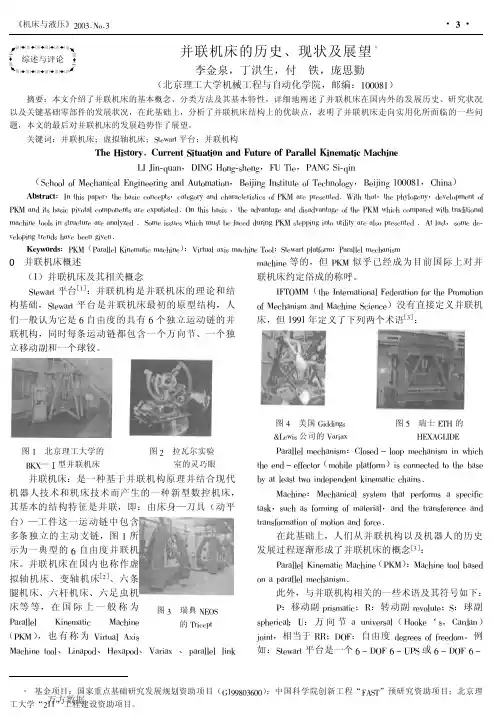
1994年在芝加哥国际机床博览会(I MTS'94)上首次展出了称为“六足虫”(Hexapod)和“变异型”(VARIAX)的数控机床与加工中心并引起了轰动[2]。
此后,各主要工业国家都投入了大量的人力和物力进行并联机床的研究与开发。
如美国Ingersoll Milling公司、Giddings&Le wis公司和Hexal 公司,英国Geodetic Technology公司,俄罗斯Lapik公司,德国Mikromat公司、亚琛工业大学、汉诺威大学、斯图加特大学,挪威Multicraft公司,瑞士ETZH和I FW研究所,瑞典Neos机器人公司,意大利Comau 机床公司,丹麦Braunschweig公司,日本丰田公司、日立公司、三菱公司,韩国SENA TE CHNOLOGIE S公司等单位相继研制出不同结构形式的数控机床、激光加工和水射流机床、坐标测量机等基于并联机构的制造设备[3~6]。
并联机床所涉及的基本理论问题同样引起了许多研究单位的重视,由美国国家科学基金会动议,1998年在意大利召开了第一届国际并联运动学机器专题研讨会,2000年在美国召开了第二届国际并联运动学机器专题研讨会。
我国已在国家“九五”科技攻关计划和“863”高技术发展计划中对并联机床的研究与开发予以支持。
中国科学院沈阳自动化研究所、清华大学、天津大学、哈尔滨工业大学、东北大学、河北工业大学等单位的研究人员也在积极从事并联机床领域的研究工作,并与相关企业合作研制了数台结构形式各异的样机[7~9]。
基于并联机器人的多坐标数控机床研究已成为机器人研究领域以及机床制造领域的研究热点。
目前,国内外所推出的各种并联机床大多数都是单纯利用并联机构(尤其是其中的Ste wart平台机构)来构造机床(也有一些在并联机构的动平台上再串接一、两个转动关节以增加工具的姿态空间)。
根据其相应的并联机构所具有的自由度主要有6自由度(6条腿)以及3自由度(3条腿)两类;按照各分支链的驱动方式可分为两种形式:一种形式为各分支链(定长杆)的一端通过滑块(或丝杠螺母副)沿固定平台导轨移动(简称“腿滑动”)来改变动平台的位置及姿态;另一种形式为通过各分支链杆长的伸缩(简称“腿伸缩”)来改变动平台的位置及姿态。
2.1 “腿伸缩”的6条腿机床在现已推出的并联机床机型中,大多数属于这种类型。
这类机床所采用的并联机构就是最典型的6自由度Stewart平台,如图1示。
即动平台通过6条可伸缩的腿与固定平台相连,通过控制6条可伸缩腿的长度来驱动动平台运动以改变动平台在空间的位置和姿态。
这种形式的典型代表为美国Inger-soll公司的“八面体六足虫”(Octahedral Hexapod),该公司的第一代产品VOH-1000为立式布局,其第二代产品HOH-600改为卧式布局,该型机床也是世界上首台卧式布局的基于6自由度Stewart平台的并联机床。
卧式布局极大地改善了工件的可接近性,也改善了工作空间对机床所占体积之比。
H OH -600型的X、Y、Z轴行程分别为600mm×600mm×800mm;A,B轴均为±15°;工作台为630mm×630mm 的分度转台,故可实现5轴四面加工。
刀具的最大进给速度为30m/min,加速度为0.5g,主轴转速为0~20000r/min;最大功率为37.5kW;最大扭矩为49.1Nm。
刀库放置在机床的左侧,容量为40或80把刀。
换刀时刀库进入工作区,换刀后退出,无机械手,空间精度为0.02mm。
德国Mikromat公司的6X型机床为立式布局的“腿伸缩”的6条腿机床,他们以主轴筒体取代了动平台,3条腿位于筒体上部,另3条腿位于筒体下部。
如此连接有利于主轴有倾角时受力均匀,机床的固有频率很高,主轴运转极平稳。
国内开发的并联机床中也有几台属于这种类型,都采用了立式布局。
清华大学与天津大学联合开发的VAMT1Y型虚拟轴机床原型样机于1997年底完成。
哈尔滨工业大学在CI MT'99上展出了BJ 系列的“腿伸缩”6条腿机床。
在CI MT'2001上,该校又与哈尔滨量具刃具厂联合推出了称为“新一代并联机床”的“腿伸缩”结构6条腿机床,据介绍该机床的加工范围为400×600mm;主轴最大姿态角27°;主轴电机功率为9kW;主轴转速10~8000r/min;重复精度为0.002mm;定位精度为0.015mm;机床外形尺寸为1800mm×1500m m×2300mm。
在CIMT' 2001上还展出了一台由清华大学与昆明机床股份有限公司联合研制的XNZ63数控镗铣虚拟轴机床, XNZ63采用上下平台均分层的Stewart机构,如此安排能有效降低各支链干涉的可能。
该机床主要技术指标为:作业空间400mm ×400mm ×300mm ;刀具摆角为±25°;定位精度为±0.02mm ;最大速度为15m /min ;主轴转速0~8000r /min ,主轴功率为10kW 。
2.2 “腿滑动”的6条腿机床这类机床的6条腿长度固定,通过腿的一端在机架导轨上滑动来改变动平台的位置、姿态。
例如瑞士联邦技术学院机床和制造研究所提出的6滑块机构(Hexaglide ),共有3条水平方向的导轨,每条导轨上有两个腿座在上面作相互平行的直线运动,6根杆长度固定,结构简单,内不含滚珠丝杠副,也就没有引起热变形的热源,工件可接近性好。
此外,日本丰田工机推出的Hexa M 也属于这种类型,该机床6条定长的腿通过滑块在倾斜布置的6根导轨上滑动,来改变动平台的位置、姿态,从而实现刀具相对工件的进给运动。
进给电机可以固定在机座上是这类机床的一个显著优点。
2.3 “腿伸缩”的3条腿机床这种形式的机床通过改变3条可伸缩腿的长度来实现动平台的3个自由度的运动,一般都需要采取一些措施约束掉动平台不需要的自由度。
其典型代表为意大利C OMAU 机床公司和瑞典NE OS 机器人公司的Tricept ,Tricept 的并联机构部分具有3个自由度,靠外侧3条腿长度(每一分支链从动平台到机座的长度)的变化来使动平台实现3个自由度的运动,中间的杆件起约束作用以限制不需要的动平台自由度,其中瑞典NEOS 机器人公司在2000年9月的美国芝加哥国际机床展览会(I MTS '2000)上展出了Tricept TR845加工中心,为实现5轴加工,该机床在动平台上串接了两个转动关节,机床进给速度达90m /min ,加速度2g ,体积定位精度达到±50μm ,重复精度为±10μm ,主轴功率为30~45kW ,主轴转速为24000~30000r /min ;刀库容量12把刀,换刀时间5~10s 。