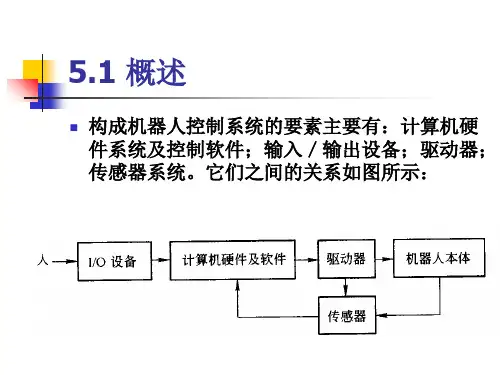
第1章 机器人控制技术绪论 机器人原理及控制技术 教学课件
- 格式:ppt
- 大小:3.73 MB
- 文档页数:7





教学大纲(早节目录):第一章绪论(2学时)1.1机器人名称的由来1.2机器人的发展史1.3机器人的定义与分类1.4机器人的结构与控制方式1.5操纵机器人1.6智能机器人1.7机器人的应用1.8未来机器人的发展方向1.9我国机器人研究的简况第一章齐次坐标变换(4学时)2.1引言22点向量和平面的描述2.3变换24平移变换2.5旋转变换3.7 T6的确定3.8 A矩阵的确定3.9根据A矩阵计算To3.10斯坦福机械手的运动学方程3.11肘机械手的运动学方程3.12本早小结2.6坐标系2.7相对变换2.8物体的描述2.9逆变换2.10-般性旋转变换2.11等价旋转角与旋转轴2.12扩展与缩小2.13透视变换2.14变换方程2.15本章小结第二章机器人运动学(2学时)3.1引言3.2姿态描述3.3欧拉角3.4摇摆、俯仰和偏转3.5位置的确疋3.6圆杆坐标和球坐标7.4稳态速度误差7.5加速度误差7.6多连杆机械手的控制7.7伺服参数的计算7.8采样数据的伺服速度7.9力矩伺服7.10本章小结第八章轨迹规划(3学时)4.4欧拉变换的逆运动学解4.5 RPY变换的逆运动学解4.6球坐标变换的逆运动学解4.7本早小结第五章微分变换(4学时)5.1引言5.2微分矩阵5.3微分平移和旋转变换5.4坐标轴的微分旋转5.5坐标系之间的微分变换5.6机械手的雅可比方程5.7雅可比逆矩阵5.8本早小结第八章机器人动力学(4学时)4.1引言4.2拉格朗日力学原理4.3机械手的动力学方程4.4本草小结第七章机器人的控制(4学时)7.1引言7.2单连杆机械手的控制73移亦伺服谆差8.3任务的描述8.4视觉8.5传送带跟踪8.6位置之间的运动8.7关节运动8.8笛卡尔坐标运动8.9本阜小结第九章静力和力的坐标变换(4学时)9.1引言9.2力和力矩的表示9.3坐标系之间的力变换9.4等效关节力矩9.5通过关节力矩计算负载质量9.6通过腕力传感器确定负载质量9.7本早小结第十章机器人的力控和顺应控制(2学时)10.1引言10.2通用机器人控制器和控制结构10.3通用机器人的动力学10.4阻抗控制10.5主动刚度控制10.6位置和力的混合控制教材:黄心汉,机器人原理及控制技术,2004ppt.课件,2007王耀南,机器人智能控制工程,科学出版社,。