KUKA机器人驱动动力电缆-KUKA驱动编码器电缆
- 格式:docx
- 大小:109.75 KB
- 文档页数:2
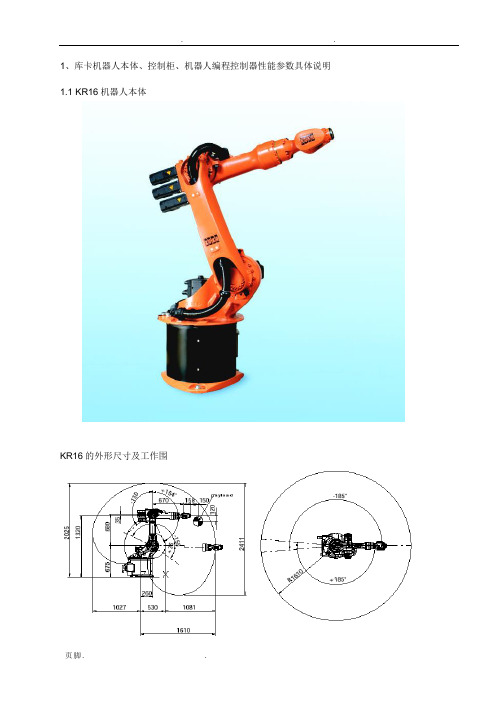
1、库卡机器人本体、控制柜、机器人编程控制器性能参数具体说明1.1 KR16机器人本体KR16的外形尺寸及工作围KR16性能参数负载(指第6轴最前端P点负载)16公斤手臂/第1轴转盘负载10/20 公斤总负载46公斤运动轴数 6法兰盘(第6轴上)DIN ISO 9409-1-A50安装位置地面/墙壁/天花板重复精度+/-0.05mm控制器KRC2自重235公斤作业空间围14.5立方米每个轴的运动参数运动围运动速度轴1+/-185°156°/s轴2+35°/-155°156°/s轴3+154°/ -130°156°/s轴4+/-350°330°/s轴5+/-130°330°/s轴6+/-350°615°/s1.2机器人控制器KRC2(1)机器人控制器KRC2外形尺寸控制柜采用高强材料作为结构框架,部器件布置简洁明了,全部采用总线形式,维护方便、可靠;控制柜的冷却按欧洲标准设计制造,元器件与冷却回路隔开,冷却可靠,外部灰层不会进入控制柜部。
(2)KRC2性能参数1.4 库卡机器人特点库卡机器人由肘节式结构的机器人本体,KRC2控制柜、示教控制器KCP组成;铝合金机器人本体、高速运动曲线的动态模型优化,使得库卡机器人的加速性能比其它普通机器人高出25%,有利于提高系统寿命、优化工作节拍;KRC2控制柜采用熟悉的个人电脑WINDOWS操作界面,中英文多种语言菜单;标准的工业计算机,硬盘、光驱、软驱、打印接口、I/O信号、多种总线接口,远程诊断;KCP具有示教、编程、安全保护功能;控制系统具有绝对位置记忆、软PLC(选项)功能;事故间隔时间长达7万小时---这是其它机器人所无法比拟的。
库卡工业机器人优点描述:(1)标准六轴工业机器人本体:⏹合理的机械结构和紧凑化设计⏹6个自由度AC伺服马达⏹绝对位置编码器⏹所有轴都带有抱闸⏹特定的负载和运动惯量的设计,使得速度和运动特性达到最优化⏹臂部的附加负载对额定负载没有运动限制⏹本体和控制器之间7m长电缆, 并可根据需要进行扩展⏹特点描述:●模块化的机械结构设计,任何部分都可迅速更换●高精度电子零点标定,任何人在任何时间所作的零点标定都是相同的,标定后,程序无需重新校正即可进入生产状态。

kuka外部轴配置步骤本文档将详细介绍KUKA外部轴配置的步骤。
通过按照以下章节逐步操作,您将能够成功配置KUKA的外部轴。
1、确保断电并处于安全状态在配置外部轴之前,确保已经断电并处于安全状态。
这是为了避免在操作过程中引发意外情况。
2、定位外部轴的位置确定外部轴将被安装在的哪个位置。
根据具体应用需求,外部轴可以安装在的任何一侧。
3、安装外部轴和连接器将外部轴和连接器安装到上。
确保连接器正确插入控制系统的对应插槽,并紧固外部轴的螺栓以确保稳固。
4、连接电源线和通信线连接外部轴的电源线和通信线。
确保电源线正确连接到对应的电源接口,并将通信线连接到控制系统的通信接口。
5、连接外部轴的编码器信号线将外部轴的编码器信号线连接到控制系统的编码器接口。
确保编码器信号线正确连接,并紧固连接器以确保良好的接触。
6、配置控制系统通过控制系统对外部轴进行配置。
在对外部轴进行配置之前,确保您已经熟悉控制系统的操作界面和配置流程。
7、测试外部轴的运动完成配置后,进行外部轴的运动测试。
根据控制系统的提示,进行外部轴的各项运动测试,确保外部轴能够正常工作。
附件:本文档无附件。
法律名词及注释:1、外部轴(External Axis):指系统之外与系统进行连接并能够独立运动的轴。
2、(Robot):可以执行各种任务的可编程设备,通常由主体、关节和控制系统组成。
3、编码器(Encoder):一种测量旋转或线性运动的装置,通常用于计算位置和速度。
机器人电缆的特点,以及机器人电缆可以用在哪个地方
一般的机器人电缆、耐扭转机器人电缆是一个统称,主要要看你的电缆使用在什么位置上。
是机器人的主体上呢还是机器人自动化产线上。
机器人电缆的特点,以及机器人电缆可以用在哪个地方
如果是机器人主体上的电缆由于目前工业机器人一般都是3-6轴的所以对高柔电缆(不管是动力的还是控制的)要求也比较高。
一般情况下弯折实验要过200万次。
拖链连续实验要求1000万次(一般国内目前最好的也就1000万次吧,)。
如果是自动化产线的话主要用到的就是普通的拖链电缆,伺服用电缆,编码器电缆,
一些通信电缆等等。
另外根据具体的使用环境需要选择不同的电压等级,不同的温度
等级,不同的护套材质。
陶氏工业电线电缆有限公司集科研、制造、营销、服务于一体的现代化高新技术企业,在线缆行业深耕十五年,企业推行“7S”管理,严格执行ISO9001国际质量认证体系及ROHS +REACH环保标准,符合“CCC”“CE” 认证,以强大的生产能力和卓越的产品品质满足不同客户的需求。
主力产品适用范围有:智能安防楼宇工程、多媒体通信系统、智能电子产品,协作机器人内部连接线、工业机器人本体电缆、工业机器人拖链电缆、高端直线电机电缆、机器人电缆线束,广泛应用于机器人、高端数控机床、自动化设备等。
www.tosgy. com。

库卡机器人线缆米安全操作及保养规程库卡机器人是一种广泛应用于工业自动化领域的机器人设备,它可以完成各种复杂的工业加工操作。
在使用库卡机器人的过程中,线缆米作为一种重要的机器人配件也需要进行安全的操作和保养。
本文将详细介绍库卡机器人线缆米的安全操作规程和保养规程。
一、安全操作规程1.1 线缆米的选购和安装在选购和安装线缆米时,应根据机器人的型号和需要的线缆长度等参数进行选择,并严格按照安装说明进行安装。
在安装时,应确保线缆米不能有过度弯曲、拉伸或扭曲的现象,同时需要保证线缆米不与机器人其他部件发生干涉。
1.2 线缆米的使用1.2.1 使用前的检查在使用前,应对线缆米进行检查,包括外观检查、电气检查和防护措施的检查等。
外观检查需要注意线缆米的外观是否完好,有无裂缝或断层等;电气检查需要测试线缆米的电气性能是否正常;防护措施的检查需要确保线缆米是否配备了绝缘层、屏蔽层等保护装置。
1.2.2 使用时的操作在使用时,应尽量避免线缆米的弯曲、拉伸或扭曲等过度运动。
同时,需要确保线缆米与机器人其他部件之间没有干涉,以免在机器人运动时导致线缆米损坏或其他安全隐患。
1.3 线缆米的维修更换在线缆米出现损坏或需要更换时,应由专业人员进行维修或更换。
更换或维修时,应根据机器人型号和线缆米的参数进行选择,并严格按照操作说明进行操作。
二、保养规程2.1 定期检查定期检查机器人的线缆米状态,包括外观检查、电气性能检查等。
检查的时间间隔可以根据使用情况确定,通常建议每3个月进行一次检查。
2.2 清洁保养定期清洁线缆米的外观,特别是需要清除灰尘和杂物等杂质。
同时,在清洁时需要注意不影响线缆米的绝缘层和屏蔽层。
2.3 保护措施线缆米在使用过程中,需要注意防止机器人与其他设备、物品的碰撞或摩擦,同时需要避免机器人一直处于高温、高压等环境中运动。
三、总结库卡机器人的线缆米是一种重要的机器人配件,其安全操作和保养对于保障机器人安全运行和延长其使用寿命具有重要意义。

点击文中飘蓝词可直接进入官网查看
Fanuc机器人动力电缆- Fanuc机器人驱动编码器电缆
Fanuc机器人是机器人技术领域上先进和创新的表现,Fanuc机器人广泛应用在装配、搬运、铸造、喷涂等不同的生产环节,满足客户的不同需求。
飞勒克小编主要研发装配并且销售Fanuc机器人动力电缆,Fanuc机器人驱动编码器电缆,如果您也有这方面的需求请联系咨询。
下面一起来看看飞勒克Fanuc机器人高速度、高性能控制器的相关介绍:1高性能CPU;
2控制器拥有高性能的通讯功能;
3支持2个以太网端口;
4高性能的伺服数字信号处理;
点击文中飘蓝词可直接进入官网查看
5支持若干轴(至多40 个轴);
6整合Vision 视觉系统;
7去除了Vision 系统所需要的PC,并提高了机器人系统的可靠性。
Feilke(飞勒克)是国际高品质线缆连接方案的供应商。
凭借优良的企业愿景、高品质产品和持续的创新能力,产品涉及各个行业,比如:汽车行业、能源行业、金属加工、塑料加工、玻璃加工、造纸技术、食品行业、机械工程等其他方面。
凭借飞勒克在国内的工厂,通过本土销售和服务网络,快速、可靠地随时为您提供各种产品,如果您也有这方面的需求请联系咨询。
机器人动力电缆1. 引言机器人技术的快速发展为各行各业带来了巨大的变革,而机器人动力电缆作为机器人运转的核心部件之一,起到了连接电源和工作组件之间的重要作用。
本文将对机器人动力电缆进行全面、详细、完整且深入的探讨。
2. 机器人动力电缆的作用机器人动力电缆是机器人的能量传输和信号传递的重要通道,具有以下作用: -为机器人供电:机器人动力电缆通过将电能从外部电源传输到机器人内部,为其提供所需的能量。
- 传递控制信号:机器人动力电缆可以传输各种控制信号,实现对机器人动作、姿态等的精确控制。
- 数据传输:机器人动力电缆还可以用于传输传感器数据、图像数据等重要信息,为机器人的智能化运作提供必要的依据。
3. 机器人动力电缆的要求机器人动力电缆在工作过程中需要满足一定的要求,以保障机器人的正常运作和安全性: 1. 耐磨性:机器人运动过程中,动力电缆容易受到磨损,因此需要具备较高的耐磨性,能够抵抗长时间的摩擦。
2. 抗拉力:机器人运动时,动力电缆可能会受到拉力的作用,因此需要具备足够的抗拉能力,确保电缆不会被拉断。
3. 耐温性:机器人在工作过程中可能会受到高温环境的影响,动力电缆应具备一定的耐温性,以保证电缆在高温条件下正常工作。
4. 耐化学性:机器人常常需要在复杂的环境下工作,动力电缆应具备一定的耐化学性,能够抵抗腐蚀和化学物质的侵蚀。
5. 电气性能:机器人动力电缆需具备良好的电气性能,包括低电阻、低电感和低噪声等特性,以提供稳定和可靠的电力供应。
4. 机器人动力电缆的设计与优化为满足机器人动力电缆的要求,需要进行合理的设计与优化: ### 4.1 材料选择选择合适的材料是机器人动力电缆设计的重要一环,常见的材料包括橡胶、塑料等,材料的选择应综合考虑耐磨性、耐温性、抗拉性等因素。
### 4.2 结构设计机器人动力电缆的结构设计应考虑到使用环境、机器人动作特点等因素,合理布置电线、保护层等组成部分,以提供稳定的电力传输和信号传递。
现场总线(PLC+)KUKA应用一、引言1.1 文档目的本文档旨在提供有关现场总线(PLC+)KUKA应用的详细介绍和操作指南。
1.2 文档范围本文档适用于使用现场总线技术控制KUKA的应用场景。
1.3 读者对象本文档主要面向PLC工程师、操作员和应用开发人员。
二、技术概述2.1 现场总线简介在工业自动化领域,现场总线是一种用于在不同设备之间传输数据的通信系统。
它允许PLC和等设备进行相互通信和协作,从而实现自动化控制。
2.2 KUKA简介KUKA是一种具有高重复精度、稳定性和可编程性的工业。
它能够在工厂生产线上执行各种任务,如搬运、焊接、组装等。
三、系统结构3.1 硬件组成现场总线(PLC+)KUKA应用的硬件组成包括PLC、KUKA、传感器和执行器等。
3.2 软件组成现场总线(PLC+)KUKA应用的软件组成包括PLC编程软件、KUKA 编程软件和现场总线配置软件等。
四、系统配置与安装4.1 硬件配置根据实际应用需求,配置PLC、KUKA、传感器和执行器等硬件设备,并完成相应的电气连线。
4.2 软件配置通过PLC编程软件和KUKA编程软件对相应系统进行配置,设置通信参数和逻辑控制。
五、系统调试与测试5.1 硬件调试对硬件设备进行调试,包括检查接线是否正确、传感器和执行器是否正常工作等。
5.2 软件调试通过PLC编程软件和KUKA编程软件对系统进行调试,确保通信正常、逻辑控制准确。
5.3 系统测试对整个系统进行测试,验证PLC与KUKA之间的通信和协作是否正常,并对各项功能进行检验。
六、应用案例6.1 KUKA在汽车生产线上的应用介绍KUKA在汽车生产线上的应用案例,如车身焊接、车身涂装等。
6.2 KUKA在电子制造领域的应用介绍KUKA在电子制造领域的应用案例,如电路板组装、基板测试等。
七、维护与故障处理7.1 系统维护说明对现场总线(PLC+)KUKA系统的定期维护工作,包括设备清洁、接线检查、软件更新等。
机器人电缆引言机器人电缆在现代自动化生产中扮演着重要的角色。
无论是工业机器人、服务机器人还是家用机器人,它们都需要电缆来传输电力和信号。
机器人电缆必须具备高度可靠性、耐久性和灵活性,以适应各种复杂环境下机器人的工作需求。
本文将介绍机器人电缆的种类、特点以及在不同领域的应用。
一、机器人电缆的种类1. 动力电缆动力电缆通常用于传输机器人运动所需的电能。
这类电缆需要具备高电流传输能力、低电阻以及耐高温等特点。
常见的动力电缆包括国内外标准化的RVV、VVF等。
2. 信号电缆信号电缆用于传输机器人的控制信号,如传感器信号、编码器信号等。
这类电缆需要具备良好的抗干扰能力和信号传输稳定性。
一般来说,信号电缆需要采用屏蔽设计,以减少外界电磁干扰对信号传输的影响。
3. 数据电缆数据电缆主要用于机器人和外部设备之间的数据交换。
例如,工业机器人通常需要与计算机或控制系统进行数据通信。
数据电缆需要具备高速传输、可靠性和抗干扰能力。
二、机器人电缆的特点1. 高度可靠性机器人电缆需要具备高度可靠性,以确保机器人系统的正常运行。
这要求电缆材料具有良好的耐磨损性和耐久性,并能承受机械应力和频繁弯曲。
2. 耐高温大部分机器人在工作时都会产生一定的热量,因此机器人电缆需要具备耐高温的特点。
高温环境下,电缆应能保持良好的电气性能,不受影响。
3. 灵活性机器人通常需要频繁移动和改变姿态,因此机器人电缆需要具备一定的灵活性和弯曲半径。
一般来说,电缆应能承受300万次以上的弯曲寿命。
4. 抗干扰能力在工业环境中,电磁干扰是一个常见问题。
机器人电缆需要具备良好的屏蔽性能,以减少外界电磁干扰对信号传输的影响,并保证数据的可靠性。
三、机器人电缆的应用领域1. 工业机器人工业机器人在汽车制造、电子制造等领域有着广泛应用。
机器人电缆在工业机器人中起着电力传输和信号传输的重要作用。
同时,工业机器人的工作环境通常恶劣,机器人电缆需要具备耐油、耐酸碱等特性。
机器人动力电缆机器人动力电缆是一种用于连接机器人内部各个部件的电缆,它能够传输电力、信号和数据等信息。
在现代工业生产中,机器人已经成为了不可或缺的一部分,而机器人动力电缆则是机器人运行的关键部件之一。
本文将从以下几个方面进行详细介绍。
一、机器人动力电缆的组成结构机器人动力电缆通常由导体、绝缘层、护套和连接头等组成。
其中,导体是传输电能、信号和数据的主要部件,通常采用铜线或铝线制成。
绝缘层是保护导体不被外界干扰的重要层级,通常采用PVC、PE等材料制成。
护套则是为了保护整个电缆不受外界物理损伤而设置的,通常采用聚氯乙烯(PVC)、聚氨酯(PUR)等材料制成。
连接头则是将机器人动力电缆与其他设备连接起来的关键部件。
二、机器人动力电缆的应用领域机器人动力电缆广泛应用于工业自动化领域中各种类型的机械臂、自动化生产线、装配线等设备中。
机器人动力电缆不仅能够传输电力和信号,还可以传输控制信息、过程数据等,使得机器人能够更加智能化、高效化地运行。
三、机器人动力电缆的优点机器人动力电缆具有以下几个优点:1. 耐用性强:机器人动力电缆采用耐磨损和耐腐蚀的材料制成,具有较强的耐久性和抗老化能力。
2. 抗干扰性强:机器人动力电缆的绝缘层材料选择精良,具有良好的抗干扰性能,可以有效地防止外界信号对其产生影响。
3. 安全可靠:机器人动力电缆在设计和制造过程中严格按照国际标准执行,保证了其安全可靠性。
同时,在使用过程中也需要注意保养和维护,以确保其长期稳定运行。
4. 适应环境广泛:由于机器人动力电缆采用了多种材料组合而成,因此它们可以适应不同环境下的使用需求。
例如,在高温或低温环境中,机器人动力电缆都能够正常工作。
四、机器人动力电缆的维护保养为了确保机器人动力电缆的长期稳定运行,需要进行适当的维护保养。
具体措施包括:1. 定期检查:定期检查机器人动力电缆的连接头、绝缘层、护套等部件是否存在损坏或老化现象,及时进行更换或修理。
点击文中飘蓝词可直接进入官网查看
KUKA机器人驱动动力电缆-KUKA驱动编码器电缆对于KUKA机器人不知道大家了解多少呢?KUKA机器人广泛应用于汽车行业,其重复精度为0.1~0.5mm,可以代替人在危险的环境工作。
飞勒克是一家专业的机器人管线包公司,自发展以来获得了众多消费者的认可和好评。
下面和大家浅谈KUKA机器人驱动动力电缆、KUKA驱动编码器电缆。
KUKA机器人驱动动力电缆、KUKA驱动编码器电缆:
总计25台KUKA机器人应用于Possehl Electronics公司位于巴登符腾堡州Pforzheim(普福尔次海姆)附近的Niefern 生产基地。
它们在那里制造汽车电动转向系的复杂控制壳体。
关于编码器电缆:新型环保线缆系列产品,编码器电缆作为连接与控制专用
点击文中飘蓝词可直接进入官网查看
柔性电缆,是可将信号或数据进行编制、转换为可用以通讯、传输或储存的设备的专用电缆,主要特点:双绞差分长距离传输信号低衰减、抗干扰以及抗串音性能高。
耐油、耐热性、阻燃、绝缘性能优异、化学性能稳定。
高柔软性、耐磨、抗日光照射、抗弯曲、防水、耐寒、抗干扰、耐候对绞线屏蔽采用优良聚乙烯使得传输性能优异,采用的新型铝箔麦拉加镀锡铜网双层编织屏蔽,有效抵抗电磁波干扰。
Feilke(飞勒克)是国际高品质线缆连接方案的供应商。
凭借优良的企业愿景、高品质产品和持续的创新能力,产品涉及各个行业,比如:汽车行业、能源行业、金属加工、塑料加工、玻璃加工、造纸技术、食品行业、机械工程等其他方面。
凭借飞勒克在国内的工厂,通过本土销售和服务网络,快速、可靠地随时为您提供各种产品,如果您也有这方面的需求请联系咨询。