LED驱动程序设计
- 格式:doc
- 大小:2.52 MB
- 文档页数:30
led驱动程序设计流程
LED驱动程序设计的基本流程大致如下:
1. 需求分析:首先,你需要明确你的LED驱动程序需要实现什么功能。
这可能包括亮度控制、颜色控制、动态效果等。
2. 选择合适的LED:根据你的需求,选择合适的LED型号。
这需要考虑LED的电压、电流需求,以及它的颜色和亮度特性。
3. 选择合适的电源:为LED提供稳定的电流和电压。
这可能是一个简单的线性电源或更复杂的开关电源。
4. 设计电路:设计驱动LED的电路。
这可能包括LED的正极和负极连接,以及任何需要的电阻或电容。
5. 编写代码:使用适当的编程语言(如C或Arduino语言)编写代码,以控制LED的行为。
这可能包括设置初始亮度、实现动态效果等。
6. 测试和调试:在开发过程中,你需要不断地测试和调试你的代码,以确保它按预期工作。
7. 优化和改进:一旦你的驱动程序开始工作,你可能会发现有改进的空间。
这可能包括提高效率、增加新功能、改进用户界面等。
8. 文档化:最后,记录你的设计决策、使用的元件、代码等,以便将来参考或他人使用。
以上就是LED驱动程序设计的基本流程,希望对你有所帮助。
LED驱动电路的研究与设计随着LED功率和光效的不断提⾼,⼤功率LED照明将在许多领域逐渐取代传统的照明灯具。
和⽩炽灯等传统灯具不同,LED属于半导体器件,其压降会随温度的增⾼⽽降低,因此⽤传统的电压源驱动LED时会导致其电流和温度不断增加,最终会损坏LED。
所以,⼤功率LED应该⽤恒流电源驱动。
恒流电源的电路种类众多,本⽂分别从电源的效率、成本和恒流性能等⽅⾯进⾏着⼿讨论。
对⽐了包括线性电源和开关电源的⼏种⽅案,并分析各电路的优缺点。
由于线性电源的⼀些固有缺陷,如低效率、体积笨重等,使线性电流源的使⽤受到了较⼤限制,⽽开关电源则恰好弥补了线性电源在这⽅⾯的不⾜。
因此,本设计最后选择了⽬前⼴泛使⽤的开关电源来实现LED的恒流驱动。
开关电源的设计⽬标是驱动1W⾼亮LED,采⽤分模块的设计⽅法,电路类型选择了反激式拓扑,这样既能起到隔离作⽤,也能控制了成本。
在LED驱动电源关键的恒流部分,采⽤TL431提供精密的参考电压,同时⽤低阻值电阻对输出电流采样,再⽤运放将两者⽐较放⼤后输出电压通过光耦反馈到电源控制芯⽚进⾏调节,得到了很好的恒流效果。
在设计完成之后的主要⼯作是对驱动电源的PCB板进⾏测试,使⽤了三个不同⼚家⽣产的1W⾼亮LED灯珠,并在不同交流输⼊情况下⽤万⽤表进⾏测试并记录了相关数据,结果显⽰本设计具有很好的恒流效果,并具有较⾼的效率。
关键词:LED驱动;反激式拓扑;隔离变压器;精密恒流摘要...................................................................... I Abstract................................................. 错误!未定义书签。
第⼀章绪论 (1)1.1 课题背景与意义 (1)1.2 课题研究的主要内容与⽬标 (2)第⼆章相关知识与⽅案的研究 (3)2.1 LED技术参数分析与型号选择 (3)2.2LED驱动电路特性研究 (4)2.2.1 普通恒压限流电路 (4)2.2.2 线性恒流驱动电路 (5)2.2.3 PWM开关恒流驱动电路 (6)2.3LED驱动电路的参数确定和电路类型选择 (6)第三章驱动电路的功率部分设计 (9)3.1PWM驱动电路的拓扑选择 (9)3.2⾼频变压器⼀次侧电路设计 (13)3.2.1 输⼊整流滤波 (13)3.2.2 EMI滤波器设计 (14)3.2.3 漏感尖峰吸收电路 (14)3.3⾼频变压器设计 (15)3.3.1 变压器磁芯与⾻架选定 (15)3.3.2 变压器⼀⼆次电感值和⽓隙设计 (17)3.3.3 变压器绕制与漏感的控制 (19)3.4 变压器⼆次侧输出电路 (20)3.5 PWM驱动IC和开关管的选⽤ (20)3.5.1 驱动IC加开关管⽅式 (21)3.5.2 开关管集成于IC的单⽚开关电源芯⽚ (21)第四章反馈电路与恒流电路设计 (23)4.1输出线与反馈⽅式 (23)4.1.1 限压精度与电路形式 (23)4.1.2 反馈电路类型选择 (23)4.2 恒流电路设计 (23)4.2.1 LED驱动电路的恒流精度要求 (23)4.2.2 恒流电路的类型及其选定 (24)第五章总体⽅案实现 (28)5.1原理图 (28)5.2 主要性能指标 (29)5.3系统调试分析 (29)总结与展望 (30)参考⽂献 (31)致谢 (32)第⼀章绪论1.1 课题背景与意义在当今全球能源紧缺的环境下,节约能源已成为⼤势所趋,仅在在照明领域,⼈们所消耗的能源就不可估量。

led智能驱动系统设计研究背景LED智能驱动系统设计研究背景引言:LED(Light Emitting Diode)作为一种新型的光源技术,具有高效节能、长寿命、快速开关、可调光等优点,已经广泛应用于照明、显示和通信等领域。
然而,为了实现更好的灯光效果和节能控制,LED智能驱动系统的设计变得至关重要。
本文将探讨LED智能驱动系统设计的背景及相关研究。
一、LED智能驱动系统的意义1. 节能环保:传统照明设备如白炽灯和荧光灯存在较大的能量浪费问题,而LED具有高效节能的特点。
通过智能驱动系统的设计,可以实现对LED灯光亮度和色温的精确控制,进一步提高节能效果。
2. 高质量照明:智能驱动系统可以实现对LED灯光亮度、色温和色彩饱和度等参数的调整,从而满足不同场景下对照明质量的需求。
3. 长寿命可靠性:通过合理设计电流和温度控制策略,智能驱动系统可以延长LED的使用寿命,提高其可靠性和稳定性。
二、LED智能驱动系统设计的关键技术1. 电源管理:LED智能驱动系统需要提供稳定可靠的电源供应。
采用高效的开关电源设计可以提高能量转换效率,减少功耗。
2. 调光控制:通过调整LED的亮度,可以实现对照明效果的精确控制。
采用PWM(Pulse Width Modulation)技术可以实现对LED灯光亮度的调节。
3. 色温控制:不同场景和需求下对灯光色温有不同要求。
智能驱动系统需要提供可调节色温的功能,以满足用户需求。
4. 温度管理:LED工作时会产生较高的热量,过高的温度会影响其寿命和性能。
智能驱动系统需要监测和控制LED工作温度,保证其在安全范围内运行。
三、相关研究进展1. LED驱动电路拓扑结构设计:研究者通过改进传统的电流源和电压源结构,提出了多种新型拓扑结构来实现高效、稳定和可靠的LED驱动电路。
2. 智能调光控制算法研究:研究者通过分析不同场景下的照明需求,提出了基于光感应、人体感应和时间控制等算法,实现对LED灯光亮度的智能调节。
汽车LED照明驱动电路设计实例设计需求:设计一个汽车LED照明驱动电路,该电路输入电压为12V,输出电压为3V,所需的电流为800mA。
设计步骤:1.确定LED参数在设计开始之前,首先需要确认LED的工作电流和电压参数。
假设所使用的LED的额定电流为800mA,额定电压为3V。
2.计算驱动电源参数由于输入电压为12V,输出电压为3V,所以需要设计一个降压电路来将输入电压降低到3V。
根据LED的电流参数,可计算出驱动电源的功率需求:P=V×I=3V×0.8A=2.4W。
3.选择开关电源芯片根据电源的功率需求,我们可以选择适合的开关电源芯片。
一般常用的芯片有LM2596、LM2576等,这些芯片具有高效率和稳定性。
4.组件选型和参数计算根据选择的开关电源芯片,我们还需要确定电感、电容和二极管等组件的参数。
根据芯片的数据手册,通过输入电压、输出电压和输出电流等参数计算得到。
5.进行原理图设计将选择的开关电源芯片和其他电子元件连接起来,形成一个完整的电路。
在原理图设计中,需要考虑到电路的稳定性和可靠性,避免电子元件之间的干扰和短路。
6.PCB布局设计在PCB布局设计中,需要考虑到电子元件的布置和连接,以保证电路的正常运行。
在布局设计中还需注意电路的EMC电磁兼容性,尽量减小电路之间的干扰和电磁辐射。
7.元器件焊接和组装根据PCB布局设计,对电子元件进行焊接和组装。
焊接时需要注意焊接接触的质量,避免冷焊、漏焊等导致电路出现问题。
8.功耗测试和调试完成电路的焊接和组装后,需要进行功耗测试和调试。
测试时需要使用电子负载等设备对电路进行负载测试,以确保电路能够正常工作,并符合设计要求。
总结:上述是一个简单的汽车LED照明驱动电路设计实例。
在实际设计过程中,还需要考虑到汽车电路的稳定性、可靠性和安全性等因素,以确保电路在各种工况下能够正常工作。
此外,还需要根据具体的需求进行电路参数的调整和优化,以实现更好的性能和效果。
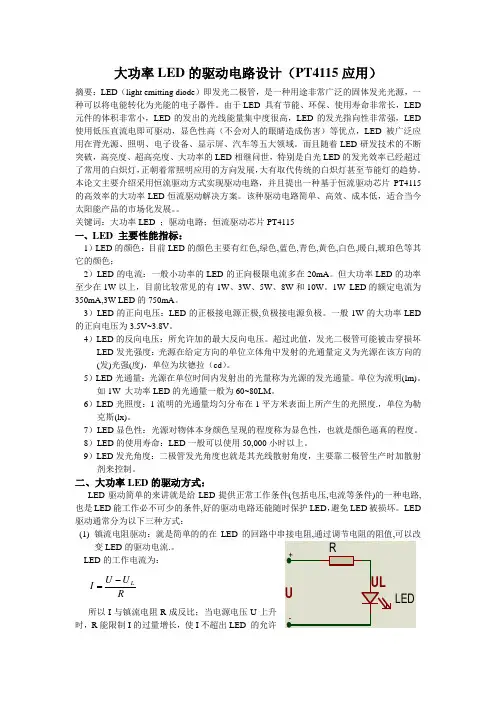
大功率LED 的驱动电路设计(PT4115应用)摘要:LED (light emitting diode )即发光二极管,是一种用途非常广泛的固体发光光源,一种可以将电能转化为光能的电子器件。
由于LED 具有节能、环保、使用寿命非常长,LED 元件的体积非常小,LED 的发出的光线能量集中度很高,LED 的发光指向性非常强,LED 使用低压直流电即可驱动,显色性高(不会对人的眼睛造成伤害)等优点,LED 被广泛应用在背光源、照明、电子设备、显示屏、汽车等五大领域。
而且随着LED 研发技术的不断突破,高亮度、超高亮度、大功率的LED 相继问世,特别是白光LED 的发光效率已经超过了常用的白炽灯,正朝着常照明应用的方向发展,大有取代传统的白炽灯甚至节能灯的趋势。
本论文主要介绍采用恒流驱动方式实现驱动电路,并且提出一种基于恒流驱动芯片PT4115的高效率的大功率LED 恒流驱动解决方案。
该种驱动电路简单、高效、成本低,适合当今太阳能产品的市场化发展。
关键词:大功率LED ;驱动电路;恒流驱动芯片PT4115一、LED 主要性能指标:1)LED 的颜色:目前LED 的颜色主要有红色,绿色,蓝色,青色,黄色,白色,暖白,琥珀色等其它的颜色;2)LED 的电流:一般小功率的LED 的正向极限电流多在20mA 。
但大功率LED 的功率至少在1W 以上,目前比较常见的有1W 、3W 、5W 、8W 和10W 。
1W LED 的额定电流为350mA,3W LED 的750mA 。
3)LED 的正向电压:LED 的正极接电源正极,负极接电源负极。
一般1W 的大功率LED 的正向电压为3.5V~3.8V 。
4)LED 的反向电压:所允许加的最大反向电压。
超过此值,发光二极管可能被击穿损坏 LED 发光强度:光源在给定方向的单位立体角中发射的光通量定义为光源在该方向的(发)光强(度),单位为坎德拉(cd )。
5)LED 光通量:光源在单位时间内发射出的光量称为光源的发光通量。
基于PWM的无级调光LED驱动电路设计共3篇基于PWM的无级调光LED驱动电路设计1无级调光LED驱动电路设计PWM调制是现代电子技术中广泛使用的一种技术,它通过调节与维持多种输出点之间的准确关系,使得电子器件能够控制电力用于对外输出。
在LED灯的驱动电路中,PWM调制技术同样得到了广泛的应用。
本文旨在介绍基于PWM技术的无级调光LED驱动电路的设计原理和具体实现方法。
1. PWM技术原理PWM技术是利用开关元件不断地开关,将直流电按照一定的占空比转换成为具有高频脉冲的电压信号,从而精准地控制输出的电力大小。
PWM技术可以实现模拟信号的数字化,进而通过数字控制进行输出。
这种技术的优势包括:(1)工作效率高:PWM驱动电路的输出信号是具有脉冲宽度和周期的高频脉冲信号,其输出的平均值可以由占空比决定,因此电力传输效率高。
(2)输出精度高:PWM技术可以便捷地实现数字控制输出,利用数字序列、计数器等实现精准控制。
(3)抗干扰能力好:PWM技术输出的是高频脉冲信号,因此能够减少对噪声等外部干扰的影响,保证输出效果。
由于PWM技术的优势,其在LED灯的驱动电路中得到了广泛的应用。
下面我们将介绍基于PWM技术的无级调光LED驱动电路的具体设计方法。
2. 无级调光LED驱动电路设计(1)PWM信号的产生与控制PWM信号的产生与控制是无级调光LED驱动电路的核心。
其原理是通过对PWM信号的频率和占空比进行控制,进而实现对LED的亮度进行精准控制。
该电路实现的具体步骤如下:步骤一:产生基础信号在无级调光LED驱动电路中,我们需要产生一种基础的PWM信号,以此作为后续控制的基础信号。
产生基础信号的主要步骤包括:通过555定时器或者微处理器产生基础信号;对产生的信号进行整形,使其成为占空比可调的方波。
步骤二:PWM信号的控制针对LED驱动电路的具体要求,我们需要实现对基础信号频率和占空比的控制。
具体的PWM信号控制方法如下:进入控制阶段后,对信号进行持续分频,并利用数字控制占空比输出。
LED驱动电路的设计一、LED的特性LED(发光二极管)是一种半导体器件,正向导通时产生光,可以将电能转化为光能。
在正常工作条件下,LED需要稳定的电流来进行驱动,过大或过小的电流都会影响其光亮度和寿命。
二、基本驱动电路常见的LED驱动电路有恒流驱动和恒压驱动两种。
1.恒流驱动电路恒流驱动电路是一种将输入电压转换为恒定电流输出的电路。
这种电路通常使用电流源、限流电阻和集电极与电源负极连接的三个元件构成。
通过控制电流源的输出电流大小,可以实现对LED的实时电流调节。
2.恒压驱动电路恒压驱动电路是一种将输入电压转换为恒定电压输出的电路。
这种电路通常使用电压源和限流电阻构成。
通过控制限流电阻的阻值,可以实现对LED的实时电流调节。
三、设计流程设计LED驱动电路的关键是确定所需的电流和电压,然后选择合适的电流源和限流电阻来实现。
1.确定所需的电流和电压LED在不同的工作条件下,所需的电流和电压是不同的,所以首先要确定所需的电流和电压。
这可以根据LED的参数和光亮度要求来确定。
2.选择适合的电流源和限流电阻根据所需的电流和电压来选择适合的电流源和限流电阻。
电流源可以选择常见的电流源芯片,如恒流源芯片,或者使用差分放大器和反馈电路来实现。
限流电阻可以根据LED的参数和所需的电流和电压来计算得到。
3.控制电流源和限流电阻根据设计的电路来控制电流源和限流电阻,以实现对LED的实时电流调节。
可以使用反馈电路来实现自动控制,也可以通过外部电路来手动调节。
四、其他考虑因素在LED驱动电路的设计中,还需要考虑到一些其他因素,如稳定性、效率和保护。
1.稳定性2.效率3.保护在设计时需要考虑到对LED的过电流、过压和过温等保护措施,以防止LED因异常工作而损坏。
总结:LED驱动电路设计需要根据LED的特性和工作要求来进行选择和计算,确保输出的电流和电压稳定,并具备高效、稳定和安全的特点。
在实际设计过程中,还需要考虑到其他因素的影响,如稳定性、效率和保护。
![第16章-LED灯驱动设计[30页]](https://uimg.taocdn.com/4aeb5339f5335a8103d22026.webp)
LED驱动芯片工作原理与电路设计LED(Light Emitting Diode,发光二极管)驱动芯片在许多应用中被广泛使用,例如背光源、指示灯、家用照明等。
本文将介绍LED驱动芯片的工作原理和电路设计。
一、LED驱动芯片工作原理1.电源管理:LED驱动芯片需要提供电源管理电路,以保证LED驱动电流的稳定性。
一般情况下,驱动芯片会通过直流-直流(DC-DC)转换器将输入电压调整为合适的电压。
2.电流调节:LED的亮度与电流成正比,因此,LED驱动芯片需要能够调节LED的驱动电流。
一般情况下,驱动芯片会通过反馈电路,实时监测LED电流,以实现恒定电流输出。
3. PWM调光:LED灯的亮度调节通常使用PWM(Pulse Width Modulation,脉宽调制)技术。
驱动芯片需要提供PWM调光功能,通过改变PWM信号的占空比来改变LED的亮度。
二、LED驱动电路设计1.高效率:LED电源的工作效率应尽可能高,以减少能量损耗。
一般情况下,驱动电路采用开关电源设计,可以提高工作效率。
2.稳定性:驱动电路需要具备稳定的驱动电流输出能力,以确保LED 的稳定亮度。
电流反馈和电流保护功能是确保电流稳定性的关键。
3.电流精度:驱动电路应具备高精度的电流输出能力,以满足不同LED的驱动需求。
通常情况下,驱动电路具备可调节电流输出功能。
4.PWM调光:驱动电路需要提供PWM调光功能,以满足亮度调节的需求。
PWM调光电路应具备高精度、低失真的亮度调节能力。
5.过温保护:驱动电路应具备过温保护功能,以防止过热损坏。
过温保护电路可以监测电路温度,当温度超过设定阈值时,即可触发过温保护措施。
以上是LED驱动芯片的工作原理和电路设计的主要内容。
通过合理设计电源管理、电流调节、PWM调光、过温保护等功能模块,可以实现高效、稳定、精确的LED驱动,满足不同应用场景的需求。
altium designer 设计实例Altium Designer是一款强大的电子设计自动化软件,广泛应用于PCB设计、电子元器件布局和模拟电路仿真等领域。
本文将介绍一个Altium Designer的设计实例,以帮助读者更好地了解和使用这一软件。
设计实例:单层LED驱动电路板设计一、设计目标本次设计的目标是设计一个单层LED驱动电路板,用于驱动一组高亮度LED灯。
电路板应具有稳定可靠的性能,能够提供稳定的电流和电压给LED灯,并且易于制造和组装。
二、设计流程1. 确定电路需求:根据实际应用需求,确定所需驱动的LED灯数量、电流和电压要求。
假设需要驱动4个高亮度LED灯,每颗LED灯的电流为20mA,工作电压为3.3V。
2. 绘制电路原理图:在Altium Designer中,选择新建工程,然后在原理图编辑器中绘制电路原理图。
根据LED驱动电路的特点,设计采用恒流驱动方式,使用场效应管作为开关元件。
在原理图中绘制LED灯、电流调节电阻、场效应管等元件,并连接它们的引脚。
3. PCB布局设计:在Altium Designer中,打开PCB编辑器,将原理图中的元件进行布局。
布局时需要考虑电路的稳定性和抗干扰能力,尽量避免元件之间的相互干扰。
同时,还需要考虑电路板的尺寸和外形,以便于后续的制造和组装。
4. 进行布线设计:在完成布局后,需要进行布线设计。
在Altium Designer中,可以使用自动布线功能或手动布线功能进行布线。
布线时需要注意信号走线的长度、宽度和方向等因素,以确保信号传输的可靠性和稳定性。
5. 生成制造文件:在完成布线后,需要生成制造文件,包括Gerber文件和钻孔文件等。
Altium Designer提供了一键生成制造文件的功能,用户只需点击相应按钮即可生成所需的文件。
6. PCB制造和组装:将生成的制造文件发送给PCB制造厂商进行生产,然后将生产好的PCB板进行组装。
组装时需要按照焊接规范进行焊接,确保元件焊接牢固且正确。
LED灯矩阵驱动电路的设计随着科技的发展和人们对生活品质的追求,LED灯矩阵已经广泛地应用于各种场合,如广告牌、车灯、电视墙等。
因此,设计一种高效、稳定的LED灯矩阵驱动电路显得尤为重要。
一、LED灯矩阵的基本原理LED灯矩阵就是由多个LED灯组成的一个阵列,如图所示。
为了实现LED灯的控制,需要使用细分器将阵列分为多行和多列。
例如,上图可以分为三行和五列,每一行和每一列均接有若干个LED灯。
通过控制每一列或每一行的信号,就可以实现对每一个LED灯的控制。
二、LED灯矩阵驱动电路的设计常见的LED灯矩阵驱动电路有两种:行列扫描式和点阵式。
行列扫描式通过对每一行和每一列的扫描,从而控制LED灯的亮灭;点阵式则直接控制每一个LED灯的亮灭。
下面以点阵式LED灯矩阵驱动电路为例,介绍具体的设计方案。
1.电源电压的确定LED灯矩阵驱动电路需要提供稳定的电源电压,通常使用5V 或12V的直流电源。
需要注意的是,电源电压要比LED灯的正向电压高出一定的值,以确保LED灯能够正常工作。
2.驱动芯片的选择常见的LED灯矩阵驱动芯片有MAX7219、74HC595等。
这些芯片可以用来控制每一个LED灯的亮度和状态,并且能够实现串联多个LED灯矩阵的控制。
在选择芯片时,需要考虑其支持的控制点数和亮度等级,以及接口类型和封装形式等因素。
3.引脚的分配LED灯矩阵通常需要占用不少于24个引脚,包括行控制引脚、列控制引脚和数据传输引脚等。
因此,在引脚分配时,需要充分考虑芯片类型和输入输出要求等因素,尽可能减少引脚的使用量。
4.模块化设计为了方便生产和维护,LED灯矩阵驱动电路常常采用模块化设计。
每个模块包含一个LED灯矩阵和一个驱动芯片,在输入输出和引脚分配等方面具有良好的封装性和可扩展性。
5.安全性和可靠性的考虑LED灯矩阵驱动电路需要考虑到其稳定性和安全性。
例如,需要合理地安置散热器,防止芯片过热而损坏;还需要添加保险丝等制度,防止电路短路或超载而损坏芯片或LED灯。
led恒流驱动电源课程设计一、课程目标知识目标:1. 学生能理解LED的基本工作原理及特性,掌握恒流驱动电源在LED应用中的重要性。
2. 学生能够掌握恒流源电路的基本构成、工作原理及其在LED驱动中的应用。
3. 学生能够了解并描述不同类型的LED恒流驱动电源电路,以及它们在实际应用中的优缺点。
技能目标:1. 学生能够运用所学知识,设计简单的LED恒流驱动电源电路,并进行仿真或实验操作。
2. 学生能够通过计算和实践,掌握LED串联、并联电路中电流、电压的分配,并能够合理选择电路元件。
3. 学生能够分析和解决LED恒流驱动电源中可能出现的问题,优化电路设计。
情感态度价值观目标:1. 培养学生对电子技术的兴趣,激发他们探索科学原理的积极性。
2. 增强学生的环保意识,理解LED作为绿色光源在节能减排中的重要作用。
3. 培养学生的团队协作精神,通过合作设计电路,提高沟通与协作能力。
本课程针对高年级电子技术相关专业学生设计,课程性质为理论与实践相结合的综合性课程。
学生应具备一定的电子电路基础知识,能够理解并应用复杂电路原理。
教学要求强调知识与实践相结合,注重培养学生的动手能力和创新能力,通过课程学习,使学生达到既定的学习成果,为将来的专业发展打下坚实基础。
二、教学内容1. LED工作原理及其特性- LED的光电特性- LED的伏安特性- LED的应用领域2. 恒流驱动电源的原理- 恒流源的定义与作用- 恒流源电路的基本构成- 恒流源在LED驱动中的应用3. LED恒流驱动电源电路设计- 串联与并联LED电路分析- 恒流源电路的设计与计算- 电路元件的选择与应用4. 常见LED恒流驱动电源电路分析- 线性稳流源电路- 开关稳流源电路- 不同电路类型的优缺点对比5. LED恒流驱动电源的制作与调试- 电路图的绘制- 仿真软件的使用- 实际电路的搭建与调试6. 故障分析与优化- 电路故障诊断- 优化电路设计- 提高电源的可靠性和稳定性教学内容依据课程目标进行选择,注重科学性和系统性。
LED驱动显示电路课程设计一、教学目标本课程的目标是让学生了解和掌握LED驱动显示电路的基本原理和设计方法。
知识目标要求学生掌握LED的工作原理、驱动电路的设计方法、显示电路的连接方式等。
技能目标要求学生能够设计简单的LED驱动显示电路,并能够进行实验和调试。
情感态度价值观目标要求学生培养对电子技术的兴趣和好奇心,提高动手能力和创新意识。
二、教学内容教学内容主要包括LED的基本原理、驱动电路的设计、显示电路的连接方式等。
具体包括以下几个方面:1.LED的工作原理和特性:介绍LED的基本工作原理、发光特性、亮度调节方法等。
2.驱动电路的设计:讲解驱动电路的基本组成、设计方法、驱动方式等。
3.显示电路的连接方式:介绍各种显示电路的连接方式,如共阴共阳连接、串并联连接等。
三、教学方法为了激发学生的学习兴趣和主动性,本课程将采用多种教学方法。
包括:1.讲授法:讲解基本原理、概念和方法。
2.案例分析法:分析具体的LED驱动显示电路设计案例,让学生了解实际应用。
3.实验法:进行实际的电路搭建和调试,让学生亲手操作,提高实践能力。
四、教学资源为了支持教学内容和教学方法的实施,我们将选择和准备以下教学资源:1.教材:选用适合学生水平的教材,提供基本的学习内容。
2.参考书:提供相关的参考书籍,丰富学生的知识储备。
3.多媒体资料:制作课件、视频等多媒体资料,直观地展示电路设计和实验过程。
4.实验设备:准备实验所需的仪器设备,如LED灯、驱动电路模块、显示电路模块等,让学生进行实际操作。
六、教学安排本课程的教学安排将根据学生的实际情况和需求进行调整,以确保教学进度和教学时间的合理性。
考虑到LED驱动显示电路的复杂性和学生的学习能力,我们将采用分阶段的教学方法,逐步引导学生掌握相关知识和技能。
首先,我们将从LED的基本原理和特性开始讲解,让学生了解LED的工作原理、发光特性以及驱动方式。
这一阶段将通过理论讲解和实例分析,帮助学生建立基础知识体系。
LED灯矩阵驱动电路的设计LED灯矩阵是一种常见的LED显示器件,它由多个LED灯组合而成,可用于数字、文字、图案等形式的显示,具有广泛的应用领域。
为了实现对LED灯矩阵的控制,需要设计一种适合的矩阵驱动电路,本文将介绍LED灯矩阵驱动电路的设计方法及其基本原理。
一、LED灯矩阵的基本原理LED灯矩阵由多行多列的LED灯组成,在进行控制时,需要依次点亮各个LED灯,使其呈现出预定的显示效果。
因此,LED灯矩阵的控制需要利用多路开关或多路选择器进行,以实现对各个LED灯的点亮和熄灭。
二、LED灯矩阵驱动电路的设计要点1、选择适合的控制芯片LED灯矩阵的驱动电路需要控制多个LED灯的亮度和显示效果,因此需要选用适合的控制芯片,常用的控制芯片有MAX7219、MAX7221等。
2、适当设置列选输入列选输入是LED灯矩阵中用来选择列的输入信号,一般采用集中式控制模式进行控制。
在设置列选输入时,需要确认输入信号的稳定性,避免出现漏电现象。
3、使用合适的电容LED灯矩阵的驱动电路要求控制精度高、亮度均匀,因此必须使用适当的电容进行调节。
电容的选择需要综合考虑驱动电路的电流、频率以及灯珠数目等因素。
4、保证电路的稳定性LED灯矩阵驱动电路的稳定性对于矩阵显示的质量有着至关重要的影响。
在设计电路时,需要保证器件的匹配性以及电路的抗干扰性,避免引起器件失效或电路抖动等情况。
三、LED灯矩阵驱动电路的设计步骤1、确定要显示的内容在进行LED灯矩阵的驱动电路设计前,首先需要明确所要显示的内容,以便于后续的电路设计和控制。
2、确定LED灯矩阵的结构参数LED灯矩阵的结构参数包括行数、列数、灯珠数目等,需根据显示目的选择合适的结构参数。
3、选用适合的控制芯片根据所选择的LED灯矩阵的结构参数,选择适合的控制芯片进行驱动电路设计。
4、设计电路原理图根据构成LED灯矩阵的LED灯的行列排列,设计相应的电路原理图,确定行选输入、列选输入以及LED灯的电源等参数。
LED驱动程序设计分类:ARM系统进阶班(arm裸机程序)2012-08-24 13:23 1561人阅读评论(0) 收藏举报首先声明,此文章是基于对国嵌视频教程中tiny6410有关视频教程的总结,为方便大家的复习。
再次予以感谢,感谢国嵌各位老师为我们提供如此好的视频教程,为对于想要迈入嵌入式大门却迟迟找不到合适方法的学子们指引一条光明的方向。
好了,接下来步入正题,此处将介绍tiny6410 LED驱动程序的设计。
2 下面来看看tiny6410关于LED 的原理图如图(1)所示:图1 LED原理图3 LED实例,代码如下所示:(代码摘自\光盘4\实验代码\3-3-1\src\main.c) main.c[cpp]view plaincopy1./**********************************************************2.*实验要求:用Tiny6410上的4个LED资源实现跑马灯程序。
3.*功能描述: Tiny6410用下面4个引脚连接了LED发光二极管,分别是4.* GPK4--LED15.* GPK5--LED26.* GPK6--LED37.* GPK7--LED48.* 本程序将控制这四个管脚的输出电平,实现跑马灯的效果9.*日期: 2011-3-1010.*作者:国嵌11.**********************************************************/12.#include "def.h"13.#include "gpio.h"14.15.#define LED1_ON ~(1<<4)16.#define LED2_ON ~(1<<5)17.#define LED3_ON ~(1<<6)18.#define LED4_ON ~(1<<7)19.20.#define LED1_OFF (1<<4)21.#define LED2_OFF (1<<5)22.#define LED3_OFF (1<<6)23.#define LED4_OFF (1<<7)24.#define LEDALL_OFF (0xf<<4)25.26.//GPIO27.#define GPIO_BASE (0x7F008000)28.//oGPIO_REGS类型在 gpio.h 中定义29.#define GPIO (( volatile oGPIO_REGS *)GPIO_BASE)30.31.//函数声明32.void delay(int times);33.void LedPortInit(void);34.void LedRun(void);35.36./*37. * 程序入口38. * */39.int main(void)40.{41. LedPortInit();42. LedRun();43.}44.45./*46. * 延时函数47. * */48.void delay(int times)49.{50.int i;51.for(;times>0;times--)52.for(i=0;i<3000;i++);53.}54.55./*56. * 初始化连接LED灯的管脚资源57. * @ 通过将GPIO_BASE强制转化为(volatile oGPIO_REGS*)型的指针可以很方便58. * 的访问各个GPIO寄存器的值,这种方法比通过使用寄存器地址的宏定义访问59. * 寄存器单元更加规范和科学。
60. * */61.void LedPortInit(void)62.{63. u32 uConValue;64. uConValue = GPIO->rGPIOKCON0;65. uConValue &= ~(0xffff<<16);66. uConValue |= 0x1111<<16;67. GPIO->rGPIOKCON0 = uConValue;68.}69.70./*71. * 跑马灯的实现函数72. * @ 通过控制连接LED的管脚的输出电平点亮和熄灭各个LED。
73. * @ 逐个循环点亮各个LED。
在每点亮一个后保持一定时间再熄灭它,接着74. * 点亮下一个LED,这样就形成了一个跑马灯的效果。
75. * @ 这是一个需要改善的跑马灯程序,想想怎么优化这段代码。
76. * */77.void LedRun(void)78.{79. GPIO->rGPIOKDAT |= LEDALL_OFF;80.while(1)81. {82. GPIO->rGPIOKDAT &= LED1_ON;83. delay(1000);84. GPIO->rGPIOKDAT |= LEDALL_OFF;85.86. GPIO->rGPIOKDAT &= LED2_ON;87. delay(1000);88. GPIO->rGPIOKDAT |= LEDALL_OFF;89.90. GPIO->rGPIOKDAT &= LED3_ON;91. delay(1000);92. GPIO->rGPIOKDAT |= LEDALL_OFF;93.94. GPIO->rGPIOKDAT &= LED4_ON;95. delay(1000);96. GPIO->rGPIOKDAT |= LEDALL_OFF;97. }98.}4 程序代码分析:首先来看一下宏定义部分:#define GPIO_BASE (0x7F008000) ,此处定义了GPIO所有相关寄存器的初始地址,由芯片手册S3C6410X.pdf,第308页可以得到此地址。
以下为手册截图。
由下图2可以看出,GPIO相关寄存器的初始地址即为GPACON的地址0x7F008000。
图2 GPIO的内存映射地址了解#define GPIO (( volatile oGPIO_REGS *)GPIO_BASE)之前我们先来看看oGPIO_REGS的定义(代码摘自\光盘4\实验代码\3-3-1\src\peripheral\gpio.h)gpio.h[cpp]view plaincopy1.#ifndef __GPIO_H__2.#define __GPIO_H__3.4.#ifdef __cplusplus5.extern"C" {6.#endif7.8.#include "def.h"9.10.typedef struct tag_GPIO_REGS11.{12. u32 rGPIOACON; //0x7F00800013. u32 rGPIOADAT;14. u32 rGPIOAPUD;15. u32 rGPIOACONSLP;16. u32 rGPIOAPUDSLP;17. u32 reserved1[3];18.19. u32 rGPIOBCON; //0x7F00802020. u32 rGPIOBDAT;22. u32 rGPIOBCONSLP;23. u32 rGPIOBPUDSLP;24. u32 reserved2[3];25.26. u32 rGPIOCCON; //0x7F00804027. u32 rGPIOCDAT;28. u32 rGPIOCPUD;29. u32 rGPIOCCONSLP;30. u32 rGPIOCPUDSLP;31. u32 reserved3[3];32.33. u32 rGPIODCON; //0x7F00806034. u32 rGPIODDAT;35. u32 rGPIODPUD;36. u32 rGPIODCONSLP;37. u32 rGPIODPUDSLP;38. u32 reserved4[3];39.40. u32 rGPIOECON; //0x7F00808041. u32 rGPIOEDAT;42. u32 rGPIOEPUD;43. u32 rGPIOECONSLP;44. u32 rGPIOEPUDSLP;45. u32 reserved5[3];46.47. u32 rGPIOFCON; //0x7F0080A048. u32 rGPIOFDAT;49. u32 rGPIOFPUD;50. u32 rGPIOFCONSLP;51. u32 rGPIOFPUDSLP;52. u32 reserved6[3];53.54. u32 rGPIOGCON; //0x7F0080C055. u32 rGPIOGDAT;56. u32 rGPIOGPUD;57. u32 rGPIOGCONSLP;58. u32 rGPIOGPUDSLP;59. u32 reserved7[3];60.61. u32 rGPIOHCON0; //0x7F0080E062. u32 rGPIOHCON1;63. u32 rGPIOHDAT;64. u32 rGPIOHPUD;66. u32 rGPIOHPUDSLP;67. u32 reserved8[2];68.69. u32 rGPIOICON; //0x7F00810070. u32 rGPIOIDAT;71. u32 rGPIOIPUD;72. u32 rGPIOICONSLP;73. u32 rGPIOIPUDSLP;74. u32 reserved9[3];75.76. u32 rGPIOJCON; //0x7F00812077. u32 rGPIOJDAT;78. u32 rGPIOJPUD;79. u32 rGPIOJCONSLP;80. u32 rGPIOJPUDSLP;81. u32 reserved10[3];82.83. u32 rGPIOOCON; //0x7F00814084. u32 rGPIOODAT;85. u32 rGPIOOPUD;86. u32 rGPIOOCONSLP;87. u32 rGPIOOPUDSLP;88. u32 reserved11[3];89.90. u32 rGPIOPCON; //0x7F00816091. u32 rGPIOPDAT;92. u32 rGPIOPPUD;93. u32 rGPIOPCONSLP;94. u32 rGPIOPPUDSLP;95. u32 reserved12[3];96.97. u32 rGPIOQCON; //0x7F00818098. u32 rGPIOQDAT;99. u32 rGPIOQPUD;100. u32 rGPIOQCONSLP;101. u32 rGPIOQPUDSLP;102. u32 reserved13[3];103.104. u32 rSPCON; //0x7F0081A0 105. u32 reserved14[3];106. u32 rMEM0CONSTOP; //0x7F0081B0 107. u32 rMEM1CONSTOP; //0x7F0081B4 108. u32 reserved15[2];110. u32 rMEM0CONSLP1; //0x7F0081C4 111. u32 rMEM1CONSLP; //0x7F0081C8 112. u32 reserved;113. u32 rMEM0DRVCON; //0x7F0081D0 114. u32 rMEM1DRVCON; //0x7F0081D4 115. u32 reserved16[10];116.117. u32 rEINT12CON; //0x7f008200 118. u32 rEINT34CON; //0x7f008204 119. u32 rEINT56CON; //0x7f008208 120. u32 rEINT78CON; //0x7f00820C 121. u32 rEINT9CON; //0x7f008210 122. u32 reserved17[3];123.124. u32 rEINT12FLTCON; //0x7f008220 125. u32 rEINT34FLTCON; //0x7f008224 126. u32 rEINT56FLTCON; //0x7f008228 127. u32 rEINT78FLTCON; //0x7f00822C 128. u32 rEINT9FLTCON; //0x7f008230 129. u32 reserved18[3];130.131. u32 rEINT12MASK; //0x7f008240 132. u32 rEINT34MASK; //0x7f008244 133. u32 rEINT56MASK; //0x7f008248 134. u32 rEINT78MASK; //0x7f00824C 135. u32 rEINT9MASK; //0x7f008250 136. u32 reserved19[3];137.138. u32 rEINT12PEND; //0x7f008260 139. u32 rEINT34PEND; //0x7f008264 140. u32 rEINT56PEND; //0x7f008268 141. u32 rEINT78PEND; //0x7f00826C 142. u32 rEINT9PEND; //0x7f008270 143. u32 reserved20[3];144.145. u32 rPRIORITY; //0x7f008280 146. u32 rSERVICE; //0x7f008284 147. u32 rSERVICEPEND; //0x7f008288 148. u32 reserved21;149.150. u32 reserved22[348];151.152. u32 rGPIOKCON0; //0x7f008800154. u32 rGPIOKDAT; //0x7f008808 155. u32 rGPIOKPUD; //0x7f00880c 156.157. u32 rGPIOLCON0; //0x7f008810 158. u32 rGPIOLCON1; //0x7f008814 159. u32 rGPIOLDAT; //0x7f008818 160. u32 rGPIOLPUD; //0x7f00881c 161.162. u32 rGPIOMCON; //0x7f008820 163. u32 rGPIOMDAT; //0x7f008824 164. u32 rGPIOMPUD; //0x7f008828 165. u32 reserved23;166.167. u32 rGPIONCON; //0x7f008830 168. u32 rGPIONDAT; //0x7f008834 169. u32 rGPIONPUD; //0x7f008838 170. u32 reserved24;171.172. u32 reserved25[16];173.174. u32 rSPCONSLP; //0x7f008880 175.176. u32 reserved26[31];177.178. u32 rEINT0CON0; //0x7f008900 179. u32 rEINT0CON1; //0x7f008904 180. u32 reserved27[2];181.182. u32 rEINT0FLTCON0; //0x7f008910 183. u32 rEINT0FLTCON1; //0x7f008914 184. u32 rEINT0FLTCON2; //0x7f008918 185. u32 rEINT0FLTCON3; //0x7f00891c 186. u32 rEINT0MASK; //0x7f008920 187. u32 rEINT0PEND; //0x7f008924 188. u32 reserved28[2];189. u32 rSLPEN; //0x7f008930 190.191.}192.oGPIO_REGS;193.194.#ifdef __cplusplus195.}196.#endif197.198.#endif //__GPIO_H__由此可以看出oGPIO_REGS为一结构体,(( volatile oGPIO_REGS *)GPIO_BASE)为指向此结构体的指针,该指针即GPIO指向的初始地址为GPIO_BASE(0x7F008000),通过使用此指针,可以遍历到从GPIO_BASE地址(0x7F008000)开始到0x7F008930地址处的所有寄存器。