常用的八种数字滤波算法
- 格式:doc
- 大小:218.00 KB
- 文档页数:5
单片机利用软件抗干扰的几种滤波方法1、限幅滤波法(又称程序判断滤波法)A、方法:根据经验判断,确定两次采样允许的最大偏差值(设为A),每次检测到新值时判断:如果本次值与上次值之差<=A,则本次值有效;如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次值。
B、优点:能有效克服因偶然因素引起的脉冲干扰。
C、缺点无法抑制那种周期性的干扰,平滑度差。
2、中位值滤波法A、方法:连续采样N次(N取奇数),把N次采样值按大小排列,取中间值为本次有效值。
B、优点:能有效克服因偶然因素引起的波动干扰,对温度、液位的变化缓慢的被测参数有良好的滤波效果。
C、缺点:对流量、速度等快速变化的参数不宜。
3、算术平均滤波法A、方法:连续取N个采样值进行算术平均运算,N值较大时:信号平滑度较高,但灵敏度较低;N值较小时:信号平滑度较低,但灵敏度较高;N值的选取:一般流量,N=12;压力:N=4。
B、优点:适用于对一般具有随机干扰的信号进行滤波,这样信号的特点是有一个平均值,信号在某一数值范围附近上下波动。
C、缺点:对于测量速度较慢或要求数据计算速度较快的实时控制不适用,比较浪费RAM。
4、递推平均滤波法(又称滑动平均滤波法)。
A、方法:把连续取N个采样值看成一个队列,队列的长度固定为N,每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据.(先进先出原则),把队列中的N个数据进行算术平均运算,就可获得新的滤波结果。
N值的选取:流量,N=12;压力:N=4;液面,N=4~12;温度,N=1~4。
B、优点:对周期性干扰有良好的抑制作用,平滑度高,适用于高频振荡的系统C、缺点:灵敏度低,对偶然出现的脉冲性干扰的抑制作用较差,不易消除由于脉冲干扰所引起的采样值偏差,不适用于脉冲干扰比较严重的场合,比较浪费RAM。
5、中位值平均滤波法(又称防脉冲干扰平均滤波法)A、方法:相当于“中位值滤波法”+“算术平均滤波法”,连续采样N个数据,去掉一个最大值和一个最小值,然后计算N-2个数据的算术平均值,N值的选取:3~14,B、优点:融合了两种滤波法的优点,对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差。

常见数字滤波技术与原理数字滤波技术是一种在数字信号处理中广泛应用的技术。
它通过在数字信号中加入一些特定的滤波器,以减少噪声、平滑信号或提取特定特征。
数字滤波器通常由数字信号处理软件或硬件实现,具有精度高、稳定性好、易于编程等优点。
常见的数字滤波技术包括移动平均滤波、滑动窗口滤波、傅里叶变换滤波等。
1. 移动平均滤波移动平均滤波是一种简单而有效的数字滤波方法。
它通过计算输入信号在一定时间窗口内的平均值,以平滑信号中的噪声。
移动平均滤波器通常由一个滑动窗口和一个累加器组成,窗口内的数据逐个进入累加器,并输出窗口内的平均值。
移动平均滤波器适用于消除随机噪声和周期性噪声。
2. 滑动窗口滤波滑动窗口滤波是一种基于滑动窗口的数字滤波方法。
它通过将输入信号分成多个固定长度的窗口,并对每个窗口内的数据进行处理,以提取特定特征或平滑噪声。
滑动窗口滤波器通常由一个滑动窗口和一个处理函数组成,窗口内的数据逐个进入处理函数,并输出处理结果。
滑动窗口滤波器适用于提取信号中的特定特征或平滑信号中的噪声。
3. 傅里叶变换滤波傅里叶变换滤波是一种基于傅里叶变换的数字滤波方法。
它通过将输入信号从时域转换到频域,以提取信号中的特定频率成分或消除特定频率成分。
傅里叶变换滤波器通常由一个傅里叶变换和一个逆傅里叶变换组成,输入信号经过傅里叶变换后得到频谱图,然后通过逆傅里叶变换将频谱图转换回时域。
傅里叶变换滤波器适用于提取信号中的特定频率成分或消除特定频率成分。
以上是常见数字滤波技术与原理的简要介绍。
在实际应用中,需要根据具体需求选择合适的数字滤波技术,以达到最佳的信号处理效果。
常用数字滤波算法
常用的数字滤波算法包括:
1. 移动平均滤波(Moving Average Filter):通过对一段时间内的
样本值取平均值来减小噪音的影响。
2. 中值滤波(Median Filter):通过将一组样本值按大小排序,然
后选择中间值作为滤波结果,从而去除异常值的影响。
3. 限幅滤波(Clipping Filter):将样本值限制在一个给定范围内,超出范围的值被替换为边界值,从而去除异常值的影响。
4. 卡尔曼滤波(Kalman Filter):基于状态估计的滤波算法,使用
模型预测和观测值校正的方式,适用于动态系统的滤波和估计。
5. 维纳滤波(Wiener Filter):根据信噪比的估计,利用频域的自
相关函数和谱估计对信号进行滤波,适用于去除加性噪声。
6. 自适应滤波(Adaptive Filter):根据输入信号的统计特性不断
更新滤波器参数,以动态调整滤波器的性能,适用于非平稳信号的滤波。
7. 快速傅里叶变换滤波(FFT Filter):通过将时域信号转换为频
域信号,滤除不需要的频率分量,然后再将频域信号转换回时域信号。
这些算法可以根据具体应用的需要选择合适的滤波方法。
常用的8种数字滤波算法摘要:分析了采用数字滤波消除随机干扰的优点,详细论述了微机控制系统中常用的8种数字滤波算法,并讨论了各种数字滤波算法的适用范围。
关键词:数字滤波;控制系统;随机干扰;数字滤波算法1引言在微机控制系统的模拟输入信号中,一般均含有各种噪声和干扰,他们来自被测信号源本身、传感器、外界干扰等。
为了进行准确测量和控制,必须消除被测信号中的噪声和干扰。
噪声有2大类:一类为周期性的,其典型代表为50 Hz 的工频干扰,对于这类信号,采用积分时间等于20 ms整倍数的双积分A/D转换器,可有效地消除其影响;另一类为非周期的不规则随机信号,对于随机干扰,可以用数字滤波方法予以削弱或滤除。
所谓数字滤波,就是通过一定的计算或判断程序减少干扰信号在有用信号中的比重,因此他实际上是一个程序滤波。
数字滤波器克服了模拟滤波器的许多不足,他与模拟滤波器相比有以下优点:(1)数字滤波器是用软件实现的,不需要增加硬设备,因而可靠性高、稳定性好,不存在阻抗匹配问题。
(2)模拟滤波器通常是各通道专用,而数字滤波器则可多通道共享,从而降低了成本。
(3)数字滤波器可以对频率很低(如0.01 Hz)的信号进行滤波,而模拟滤波器由于受电容容量的限制,频率不可能太低。
(4)数字滤波器可以根据信号的不同,采用不同的滤波方法或滤波参数,具有灵活、方便、功能强的特点。
2 常用数字滤波算法数字滤波器是将一组输入数字序列进行一定的运算而转换成另一组输出数字序列的装置。
设数字滤波器的输入为X(n),输出为Y(n),则输入序列和输出序列之间的关系可用差分方程式表示为:其中:输入信号X(n)可以是模拟信号经采样和A/D变换后得到的数字序列,也可以是计算机的输出信号。
具有上述关系的数字滤波器的当前输出与现在的和过去的输入、过去的输出有关。
由这样的差分方程式组成的滤波器称为递归型数字滤波器。
如果将上述差分方程式中bK取0,则可得:说明输出只和现在的输入和过去的输入有关。

十大滤波算法滤波是一种常用的数据处理技术,用于有效构建和改善信号的质量,优化信号的性能。
通过滤波,可以有效地抑制信号中的噪声,从而提高信号的清晰度,改善信号的性能。
现在,在许多应用及其他领域中,滤波算法已经成为一个重要的研究课题。
首先,我们应该了解滤波算法有哪些,其中主要有十类滤波算法:低通滤波、带通滤波、带阻滤波、高通滤波、椭圆滤波、阶跃滤波、时间延迟滤波、均值滤波、中值滤波、振荡器滤波。
下面,我们来详细介绍这十类滤波算法。
1. 低通滤波:它是将所有高频成分从信号中滤除,保留低频成分的一种滤波器。
它可以有效地抑制信号中的噪声,提高信号的清晰度,同时改善信号的性能。
2.通滤波:它是一种仅保留低频和高频成分的滤波器,可以有效地去除中间频率的干扰成分,提高系统的鲁棒性。
3.阻滤波:它是滤除一定范围内的频率成分,保留高频成分和低频成分的一种滤波器。
它可以有效地利用低频成分进行模型适应,以解决信号的噪声问题。
4.通滤波:它是一种仅保留高频成分的滤波器,可以有效地滤除信号中的低频成分,增强信号的清晰度。
5.圆滤波:它是在低通滤波器和带通滤波器之间的一种滤波器,可以有效地去除信号中的噪声,提高信号的清晰度。
6.跃滤波:它是一种仅保留高频成分和低频成分的滤波器,可以有效地滤除信号中的中频成分,以消除信号中的干扰。
7.间延迟滤波:它是一种仅保留低频成分的滤波器,可以有效地抑制信号中的高频成分,提高信号的清晰度。
8.值滤波:它是一种仅保留低频成分的滤波器,可以有效地抑制信号中的噪声,提高信号的清晰度。
9. 中值滤波:它是一种仅保留低频成分的滤波器,可以有效地抑制信号中的噪声,提高信号的清晰度。
10.荡器滤波:它是一种放大和抑制信号中特定频率成分的滤波器,可以有效地改善信号的性能。
以上便是十大滤波算法,它们可以有效地分离信号中的高频、低频成分,抑制信号中的噪声,提高信号的清晰度,改善信号的性能。
因此,滤波算法在现代信号处理领域的应用也越来越广泛,并且取得了很好的效果。

十大滤波算法滤波算法是信号处理中一种重要的算法,它可以有效地去除信号中的噪声,提高信号的质量。
在现在的技术发展中,滤波算法的应用越来越广泛,它可以用于多媒体信号处理、数据通信、图像处理等领域。
目前,最常用的滤波算法有十种。
首先,最基本的滤波算法就是低通滤波(Low Pass Filter,LPF),它的主要作用是抑制高频信号,使低频信号得以保留。
低通滤波是最常用的滤波算法之一,用于去除信号中的高频噪声。
其次,高通滤波(High Pass Filter,HPF)是低通滤波的反向过程,它的主要作用是抑制低频信号,使高频信号得以保留。
高通滤波也是常用的滤波算法之一,用于去除信号中的低频噪声。
再次,带通滤波(Band Pass Filter,BPF)是低通滤波和高通滤波的结合,它的主要作用是筛选出特定的频率段,使特定频率段的信号得以保留。
带通滤波可以用于信号提取,电路增强或其他应用。
第四,带阻滤波(Band Stop Filter,BSF)是带通滤波的反向过程,它的主要作用是抑制特定的频率段,使特定频率段的信号得以抑制。
它可以用于信号抑制,抑制特定频率段的噪声。
第五,振荡器滤波(Oscillator Filter,OF)是一种由振荡器组成的滤波算法,它的主要作用是产生稳定的低频信号,用于抑制高频噪声。
振荡器滤波器是在电路中比较常用的滤波算法,它用于去除信号中的高频噪声。
第六,改正型滤波(Adaptive Filter,AF)是一种根据输入信号的变化而调整滤波系数的滤波算法,它的主要作用是根据实时输入信号的变化而调整滤波系数,实现鲁棒性滤波。
改正型滤波是一种比较高级的滤波算法,它可以有效地抑制噪声,提高信号的质量。
第七,采样滤波(Sampling Filter,SF)是一种用于数字信号处理的滤波算法,它的主要作用是抑制采样频率之外的频率,使采样频率内的信号得以保留。
采样滤波是在数字信号处理中常用的滤波算法,它可以有效地抑制采样频率外的噪声,提高信号的质量。

数据处理中的几种常用数字滤波算法
在数据处理中,常用的数字滤波算法有以下几种:
1. 移动平均滤波(Moving Average Filter):将一组连续的数据取
平均值作为滤波结果。
该算法简单易实现,可以有效消除噪声,但会引入
一定的延迟。
2. 中值滤波(Median Filter):将一组连续的数据排序,并取中间
值作为滤波结果。
该算法适用于去除周期性干扰或脉冲噪声,但对于快速
变化的信号可能无法有效滤除。
3. 加权移动平均滤波(Weighted Moving Average Filter):给予
不同的数据点不同的权重,并将加权平均值作为滤波结果。
该算法可以根
据需要调整不同数据点的权重,适用于对不同频率成分有不同抑制要求的
情况。
4. 递推平滑滤波(Recursive Smoothing Filter):根据当前输入
数据与上一次滤波结果的关系,通过递推公式计算得到滤波结果。
递推平
滑滤波可以实现实时滤波,但对于快速变化的信号可能会引入较大的误差。
5. 卡尔曼滤波(Kalman Filter):适用于估计具有线性动力学特性
的系统状态,并结合观测值进行滤波。
卡尔曼滤波算法综合考虑了系统模
型和观测模型的不确定性,因此能够提供较好的估计结果。
这些数字滤波算法在实际应用中可以根据需求进行选择和组合,以实
现对信号的有效滤波和噪声抑制。

写出数字滤波的几种常用方法数字滤波是信号处理中常用的一种技术,用于对信号进行去噪、平滑或增强等处理。
常用的数字滤波方法有以下几种:一、移动平均滤波(Moving Average Filter)移动平均滤波是最简单的数字滤波方法之一。
它通过对一段时间内的信号进行平均来减小噪声的影响。
具体操作是将每个时刻的信号值与前面若干个时刻的信号值进行求平均。
移动平均滤波可以有效地去除高频噪声,平滑信号,但对于突变信号的响应较慢。
二、中值滤波(Median Filter)中值滤波是一种非线性滤波方法,它通过对信号的一组数据进行排序,并选择其中的中值作为滤波结果。
中值滤波对于椒盐噪声等脉冲性噪声有较好的抑制效果,能够有效地去除异常值,但对于连续性的噪声处理效果较差。
三、卡尔曼滤波(Kalman Filter)卡尔曼滤波是一种递推滤波方法,它通过对系统的状态进行估计和预测,结合测量值进行滤波。
卡尔曼滤波是一种最优滤波器,能够在估计误差最小的情况下对信号进行滤波。
它广泛应用于航天、导航、自动控制等领域。
四、无限脉冲响应滤波(Infinite Impulse Response Filter,IIR)无限脉冲响应滤波是一种递归滤波方法,它通过对输入信号和输出信号的差分方程进行递归计算,实现对信号的滤波。
与有限脉冲响应滤波相比,无限脉冲响应滤波具有更好的频率选择性和更高的滤波效果,但计算复杂度较高。
五、小波变换滤波(Wavelet Transform Filter)小波变换滤波是一种基于小波变换的滤波方法,它通过将信号分解为不同频率分量,然后选择性地滤除或保留不同频率分量,实现对信号的滤波和去噪。
小波变换滤波在时频域上具有较好的局部性和多分辨性,能够有效地处理非平稳信号。
总结:数字滤波是信号处理中常用的一种技术,常用的数字滤波方法包括移动平均滤波、中值滤波、卡尔曼滤波、无限脉冲响应滤波和小波变换滤波等。
每种滤波方法有其适用的场景和优劣势,选择适当的滤波方法可以有效地对信号进行去噪、平滑或增强处理。
数据滤波算法一、引言数据滤波是信号处理中的一个重要步骤,通过滤波算法可以去除信号中的噪声和干扰,使得信号更加清晰、准确。
在工业控制、医学诊断、图像处理等领域都有广泛应用。
本文将介绍常见的数据滤波算法及其原理。
二、低通滤波算法1. 概述低通滤波器是一种能够通过去除高频成分来平滑信号的滤波器。
在信号处理中,低通滤波器被广泛应用于去除噪声和平滑信号。
2. 原理低通滤波器可以看做是一个带通滤波器加上一个带阻滤波器的组合。
它通过截止频率将高频成分去除,使得信号变得平缓。
3. 常见算法(1)移动平均法:将连续n个数据求平均值作为当前数据的值,其中n为窗口大小。
(2)指数平均法:根据当前数据和前一次计算结果进行加权平均计算,权重由α决定。
4. 应用场景低通滤波器适用于需要保留较慢变化的信号,例如温度、压力等传感器信号。
三、高通滤波算法1. 概述高通滤波器是一种能够通过去除低频成分来突出高频成分的滤波器。
在信号处理中,高通滤波器被广泛应用于去除直流分量和平滑信号。
2. 原理高通滤波器可以看做是一个带阻滤波器加上一个带通滤波器的组合。
它通过截止频率将低频成分去除,使得信号变得尖锐。
3. 常见算法(1)一阶差分法:将当前数据与前一次数据进行差分计算。
(2)二阶差分法:将当前数据与前两次数据进行差分计算。
4. 应用场景高通滤波器适用于需要突出较快变化的信号,例如震动、声音等传感器信号。
四、带通/带阻滤波算法1. 概述带通/带阻滤波器是一种能够选择性地通过或者拒绝某些频率范围内的信号的滤波器。
在信号处理中,带通/带阻滤波器被广泛应用于去除特定频率范围内的噪声和干扰。
2. 原理带通/带阻滤波器可以看做是一个低通滤波器和高通滤波器的组合。
它通过选择特定的截止频率来选择性地通过或者拒绝某些频率范围内的信号。
3. 常见算法(1)巴特沃斯滤波法:采用极点归一化方法来设计数字滤波器,可实现带通、带阻、低通、高通等多种滤波器类型。
(2)切比雪夫滤波法:采用等纹图方法来设计数字滤波器,可实现带通、带阻、低通、高通等多种滤波器类型。
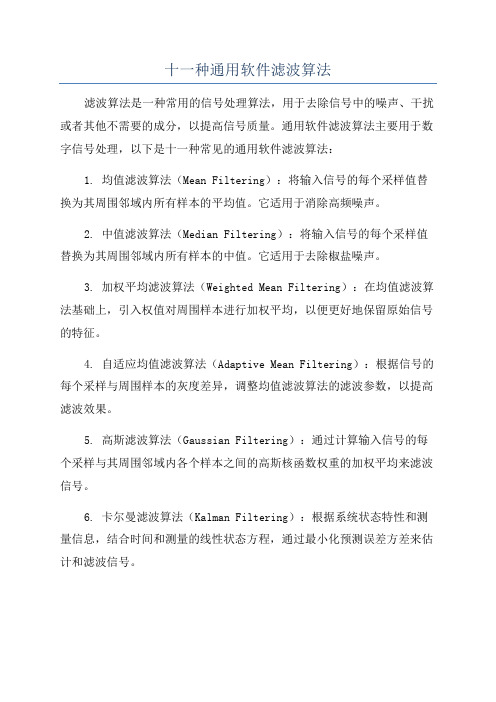
数字信号处理中的滤波算法在数字信号处理领域中,滤波算法是一种广泛应用的技术,用于处理信号中的噪声、干扰以及其他所需的频率响应调整。
滤波算法通过改变信号的频谱特性,实现信号的增强、去噪和频率分析等功能。
本文将介绍几种常见的数字信号处理中的滤波算法,包括低通滤波、高通滤波、带通滤波和带阻滤波。
一、低通滤波算法低通滤波算法是一种常见的滤波算法,用于去除高频信号成分,保留低频信号。
该算法通过选择适当的截止频率,将高于该频率的信号部分进行衰减。
常见的低通滤波算法有巴特沃斯滤波器、滑动平均滤波器和无限脉冲响应滤波器(IIR)等。
巴特沃斯滤波器是一种常见的无波纹、无相位失真的低通滤波器。
它通过设计适当的传递函数,实现对高频信号的衰减。
巴特沃斯滤波器的特点是具有平滑的频率响应曲线和较好的陡峭度。
滑动平均滤波器是一种简单的低通滤波算法。
它通过取信号一段时间内的平均值,实现对高频成分的平滑处理。
滑动平均滤波器适用于对周期性干扰信号的去噪,以及对信号进行平滑处理的场景。
无限脉冲响应滤波器(IIR)是一种递归滤波器,具有较高的计算效率和频率选择能力。
IIR滤波器通过对输入信号和输出信号进行递推计算,实现对高频信号的衰减和滤除。
然而,在一些特殊应用场景中,IIR滤波器可能会引入稳定性和相位失真等问题。
二、高通滤波算法与低通滤波相反,高通滤波算法用于去除低频信号成分,保留高频信号。
高通滤波算法通常用于信号的边缘检测、图像锐化和音频增强等处理。
常见的高通滤波算法有巴特沃斯滤波器、无限脉冲响应滤波器和基于梯度计算的滤波器等。
巴特沃斯滤波器同样适用于高通滤波。
通过设计适当的传递函数,巴特沃斯滤波器实现对低频信号的衰减,保留高频信号。
巴特沃斯高通滤波器的特点是具有平滑的频率响应曲线和较好的陡峭度。
无限脉冲响应滤波器同样具有高通滤波的功能。
通过对输入信号和输出信号进行递推计算,IIR滤波器实现对低频信号的衰减和滤除。
然而,IIR滤波器在一些特殊应用场景中可能引入稳定性和相位失真等问题。
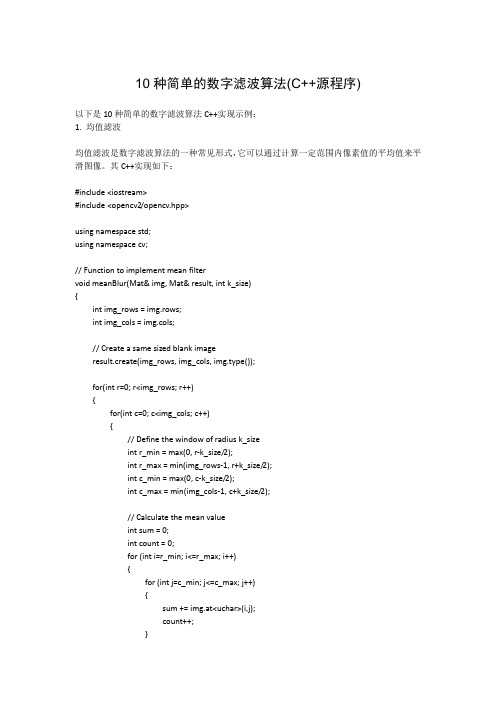
10种简单的数字滤波算法(C++源程序)以下是10种简单的数字滤波算法C++实现示例:1. 均值滤波均值滤波是数字滤波算法的一种常见形式,它可以通过计算一定范围内像素值的平均值来平滑图像。
其C++实现如下:#include <iostream>#include <opencv2/opencv.hpp>using namespace std;using namespace cv;// Function to implement mean filtervoid meanBlur(Mat& img, Mat& result, int k_size){int img_rows = img.rows;int img_cols = img.cols;// Create a same sized blank imageresult.create(img_rows, img_cols, img.type());for(int r=0; r<img_rows; r++){for(int c=0; c<img_cols; c++){// Define the window of radius k_sizeint r_min = max(0, r-k_size/2);int r_max = min(img_rows-1, r+k_size/2);int c_min = max(0, c-k_size/2);int c_max = min(img_cols-1, c+k_size/2);// Calculate the mean valueint sum = 0;int count = 0;for (int i=r_min; i<=r_max; i++){for (int j=c_min; j<=c_max; j++){sum += img.at<uchar>(i,j);count++;}}result.at<uchar>(r,c) = (uchar) (sum/count);}}}int main(int argc, char** argv){// Load the imageMat img = imread("image.jpg", 0);// Check if image is loaded properlyif(!img.data){cout << "Failed to load image" << endl;return -1;}// Define the kernel sizeint k_size = 3;// Apply mean filterMat result;meanBlur(img, result, k_size);// Display the resultnamedWindow("Original Image", WINDOW_NORMAL);namedWindow("Mean Filtered Image", WINDOW_NORMAL);imshow("Original Image", img);imshow("Mean Filtered Image", result);waitKey(0);return 0;}在上述代码中,`meanBlur()` 函数接收一个输入图像`img` 和一个输出图像`result`,以及一个整数参数`k_size`,该参数指定滤波器的大小,即窗口的半径。

常⽤的滤波算法滤波是传感器处理中的重要算法,经常接触底层常常⽤到,以下总结了⼀些滤波算法,供以后参考调⽤。
⼀、低通滤波1.1RC滤波的数字低通滤波 指在截⽌频率fc的时候,增益为-3db(Aup=0.707)的滤波器,也是模电书中出现的第⼀种硬件滤波器,以下是对应的软件形式的1阶RC 滤波器的数字形式(本断程序节选⾃匿名4轴) ⼀阶形式:Y(n)=(1-a)*Y(n-1)+a*X(n) 下式中 oldData表⽰上⼀次的输出Y(n-1) newData表⽰新的输⼊X(n)1 float LopPassFilter_RC_1st(float oldData, float newData, float a)2 {3 return oldData * (1 - a) + newData * a;4 }56 计算⽐例系数a:78 float LopPassFilter_RC_1st_Factor_Cal(float deltaT, float Fcut)9 {10 return deltaT / (deltaT + 1 / (2 * M_PI * Fcut));11 }1.2均值滤波: 把⼀段时间内的数据累加后求平均值,达到平滑的作⽤,适⽤性⼴泛,元素越多滤波效果越好时延越⾼。
1 uint16_t LowPassFilter_Average(uint16_t data[],uint16_t length)23 {45 uint32_t add=0;6 uint16_t result;7 int i;89 for(i=0;i<length;i++)10 {11 add += data[i];12 }13 result=add/length;14 return result;15 }1617 //data[]放⼊⼀段时间⾥的数值,length:data数组的长度1.3滑动滤波 在均值滤波的基础上,加上⽐例系数,最新的数据具有更⼤的⽐例,增加时效性。
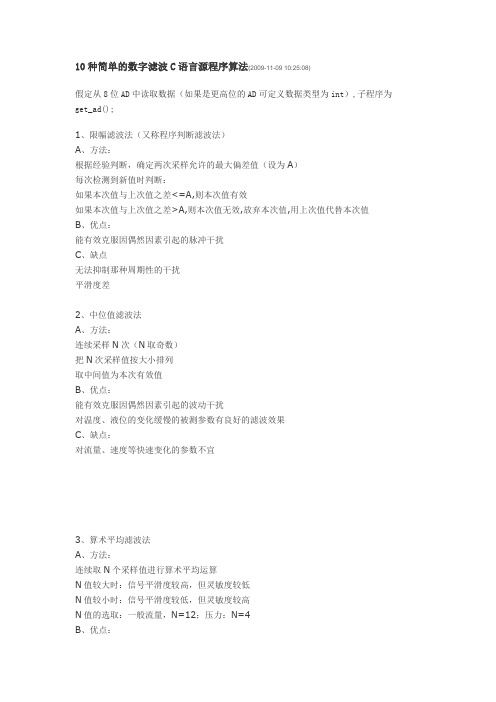
10种简单的数字滤波C语言源程序算法(2009-11-09 10:25:08)假定从8位AD中读取数据(如果是更高位的AD可定义数据类型为int),子程序为get_ad();1、限幅滤波法(又称程序判断滤波法)A、方法:根据经验判断,确定两次采样允许的最大偏差值(设为A)每次检测到新值时判断:如果本次值与上次值之差<=A,则本次值有效如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次值B、优点:能有效克服因偶然因素引起的脉冲干扰C、缺点无法抑制那种周期性的干扰平滑度差2、中位值滤波法A、方法:连续采样N次(N取奇数)把N次采样值按大小排列取中间值为本次有效值B、优点:能有效克服因偶然因素引起的波动干扰对温度、液位的变化缓慢的被测参数有良好的滤波效果C、缺点:对流量、速度等快速变化的参数不宜3、算术平均滤波法A、方法:连续取N个采样值进行算术平均运算N值较大时:信号平滑度较高,但灵敏度较低N值较小时:信号平滑度较低,但灵敏度较高N值的选取:一般流量,N=12;压力:N=4B、优点:适用于对一般具有随机干扰的信号进行滤波这样信号的特点是有一个平均值,信号在某一数值范围附近上下波动C、缺点:对于测量速度较慢或要求数据计算速度较快的实时控制不适用比较浪费RAM4、递推平均滤波法(又称滑动平均滤波法)A、方法:把连续取N个采样值看成一个队列队列的长度固定为N每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据.(先进先出原则) 把队列中的N个数据进行算术平均运算,就可获得新的滤波结果N值的选取:流量,N=12;压力:N=4;液面,N=4~12;温度,N=1~4 B、优点:对周期性干扰有良好的抑制作用,平滑度高适用于高频振荡的系统C、缺点:灵敏度低对偶然出现的脉冲性干扰的抑制作用较差不易消除由于脉冲干扰所引起的采样值偏差不适用于脉冲干扰比较严重的场合比较浪费RAM5、中位值平均滤波法(又称防脉冲干扰平均滤波法)A、方法:相当于“中位值滤波法”+“算术平均滤波法”连续采样N个数据,去掉一个最大值和一个最小值然后计算N-2个数据的算术平均值N值的选取:3~14B、优点:融合了两种滤波法的优点对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点:测量速度较慢,和算术平均滤波法一样比较浪费RAM6、限幅平均滤波法A、方法:相当于“限幅滤波法”+“递推平均滤波法”每次采样到的新数据先进行限幅处理,再送入队列进行递推平均滤波处理B、优点:融合了两种滤波法的优点对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点:比较浪费RAM7、一阶滞后滤波法A、方法:取a=0~1本次滤波结果=(1-a)*本次采样值+a*上次滤波结果B、优点:对周期性干扰具有良好的抑制作用适用于波动频率较高的场合C、缺点:相位滞后,灵敏度低滞后程度取决于a值大小不能消除滤波频率高于采样频率的1/2的干扰信号8、加权递推平均滤波法A、方法:是对递推平均滤波法的改进,即不同时刻的数据加以不同的权通常是,越接近现时刻的数据,权取得越大。
十一种通用软件滤波算法滤波算法是一种常用的信号处理算法,用于去除信号中的噪声、干扰或者其他不需要的成分,以提高信号质量。
通用软件滤波算法主要用于数字信号处理,以下是十一种常见的通用软件滤波算法:1. 均值滤波算法(Mean Filtering):将输入信号的每个采样值替换为其周围邻域内所有样本的平均值。
它适用于消除高频噪声。
2. 中值滤波算法(Median Filtering):将输入信号的每个采样值替换为其周围邻域内所有样本的中值。
它适用于去除椒盐噪声。
3. 加权平均滤波算法(Weighted Mean Filtering):在均值滤波算法基础上,引入权值对周围样本进行加权平均,以便更好地保留原始信号的特征。
4. 自适应均值滤波算法(Adaptive Mean Filtering):根据信号的每个采样与周围样本的灰度差异,调整均值滤波算法的滤波参数,以提高滤波效果。
5. 高斯滤波算法(Gaussian Filtering):通过计算输入信号的每个采样与其周围邻域内各个样本之间的高斯核函数权重的加权平均来滤波信号。
6. 卡尔曼滤波算法(Kalman Filtering):根据系统状态特性和测量信息,结合时间和测量的线性状态方程,通过最小化预测误差方差来估计和滤波信号。
7. 二阶无限脉冲响应滤波器算法(IIR Filtering):基于差分方程和递归方式运算的滤波算法,具有较好的频率响应,但容易产生数值不稳定和计算复杂度高的问题。
8. 有限脉冲响应滤波器算法(FIR Filtering):基于加权线性组合的方式来滤波信号,具有稳定性好、易于实现的特点。
9. 最小均方滤波算法(Least Mean Square Filtering):通过最小化滤波器的均方误差来更新滤波器权值,以逼近滤波器的最优解。
10. 快速傅里叶变换滤波算法(FFT Filtering):利用快速傅里叶变换将信号从时域转换为频域,并利用频域上的特性进行滤波。

1引言在微机控制系统的模拟输入信号中,一般均含有各种噪声和干扰,他们来自被测信号源本身、传感器、外界干扰等。
为了进行准确测量和控制,必须消除被测信号中的噪声和干扰。
噪声有2大类:一类为周期性的,其典型代表为50 Hz的工频干扰,对于这类信号,采用积分时间等于20 ms整倍数的双积分A/D转换器,可有效地消除其影响;另一类为非周期的不规则随机信号,对于随机干扰,可以用数字滤波方法予以削弱或滤除。
所谓数字滤波,就是通过一定的计算或判断程序减少干扰信号在有用信号中的比重,因此他实际上是一个程序滤波。
数字滤波器克服了模拟滤波器的许多不足,他与模拟滤波器相比有以下优点:(1)数字滤波器是用软件实现的,不需要增加硬设备,因而可靠性高、稳定性好,不存在阻抗匹配问题。
(2)模拟滤波器通常是各通道专用,而数字滤波器则可多通道共享,从而降低了成本。
(3)数字滤波器可以对频率很低(如0.01 Hz)的信号进行滤波,而模拟滤波器由于受电容容量的限制,频率不可能太低。
(4)数字滤波器可以根据信号的不同,采用不同的滤波方法或滤波参数,具有灵活、方便、功能强的特点。
2常用数字滤波算法数字滤波器是将一组输入数字序列进行一定的运算而转换成另一组输出数字序列的装置。
设数字滤波器的输入为X(n),输出为Y(n),则输入序列和输出序列之间的关系可用差分方程式表示为:其中:输入信号X(n)可以是模拟信号经采样和A/D变换后得到的数字序列,也可以是计算机的输出信号。
具有上述关系的数字滤波器的当前输出与现在的和过去的输入、过去的输出有关。
由这样的差分方程式组成的滤波器称为递归型数字滤波器。
如果将上述差分方程式中b K取0,则可得:说明输出只和现在的输入和过去的输入有关。
这种类型的滤波器称为非递归型数字滤波器。
参数a K、b K的选择不同,可以实现低通、高通、带通、带阻等不同的数字滤波器。
2.1算术平均值滤波算术平均值滤波是要寻找一个Y,使该值与各采样值X(K)(K=1~N)之间误差的平方和为最小,即:这时,可满足式(3)。

常见滤波算法常见滤波算法滤波算法是数字信号处理中的重要技术,其主要目的是通过去除或减弱信号中的噪声来提高信号质量。
在实际应用中,常见的噪声包括高斯噪声、椒盐噪声、斑点噪声等。
本文将介绍常见的滤波算法及其应用场景。
一、均值滤波均值滤波是最简单、最常用的一种滤波算法,其原理是将像素点周围一定范围内的像素值取平均值来代替该像素点的值。
这种方法适用于去除轻微噪声,但在去除强烈噪声时效果不佳。
二、中值滤波中值滤波是一种非线性滤波算法,其原理是将像素点周围一定范围内的像素值排序后取中间值作为该像素点的值。
这种方法适用于去除椒盐噪声和斑点噪声等离散型噪声,但在去除连续型噪声时效果不佳。
三、高斯滤波高斯滤波是一种线性平滑滤波算法,其原理是对像素点周围一定范围内的像素值进行加权平均,权值由高斯函数决定。
这种方法适用于去除高斯噪声和连续型噪声。
四、双边滤波双边滤波是一种非线性滤波算法,其原理是对像素点周围一定范围内的像素值进行加权平均,权值由空间距离和灰度差异两部分决定。
这种方法适用于保留图像细节的同时去除噪声。
五、小波变换小波变换是一种多尺度分析技术,其原理是将信号分解成不同频率的子带,并对每个子带进行滤波和重构。
这种方法适用于去除各种类型的噪声,并可根据需要调整去噪效果和保留信号细节的平衡。
六、总结不同类型的噪声需要采用不同的滤波算法进行去除。
在选择滤波算法时需要考虑信号特征、噪声类型、去噪效果等因素。
常见的滤波算法包括均值滤波、中值滤波、高斯滤波、双边滤波和小波变换等。
在实际应用中,可以根据需要组合使用不同的滤波算法来达到更好的去噪效果。
常用滤波算法
1 常见的滤波算法
滤波是数字信号处理的一个重要组成部分,它主要被用于降低噪声,消除干扰,增强重要的信号,以及增加信号的分析能力等。
传统
的滤波方法主要有线性滤波法和非线性滤波法,现在主要用线性滤波,线性滤波有内核法和傅立叶变换法。
1.1 内核法
内核法是把信号看作是一个连续函数,利用数学定义的滤波器
(滤波器是一个数学定义的函数)对信号进行滤波处理,典型的滤波
器有高斯滤波和圆形滤波,是最常用的滤波方法。
1.2 傅立叶变换法
傅立叶变换法是把信号看作是一个复数信号,把信号转换到频率域,然后利用低通、带通、高通滤波等进行处理,优点是快速,缺点
是失真较大。
1.3 卷积滤波器
卷积滤波器包括非线性卷积滤波器和线性卷积滤波器,这种方法
直接给定滤波器的权重,然后对信号进行滤波处理,优点是对滤波的
幅度可控,缺点是计算量较大。
1.4 直接归纳滤波
直接归纳滤波法是一种基于模式识别的非线性滤波,用来识别信号中的异常值,例如极端值,然后对信号进行滤波处理,优点是效果好,缺点是容易局部收敛。
1.5 其他滤波方法
除了上述常用的滤波法,还有很多滤波方法,如熵编码滤波、加权组合滤波、逐段滤波、抗苹果滤波等,这些滤波方法都有自己的特点,可以根据实际情况选择合适的滤波方法来进行滤波处理。
结论
以上就是常用的滤波算法,每种滤波算法都有自己的特性和应用场景,需要根据实际情况选择最适合的滤波方法,提高滤波效果。

最常用数字滤波方法及源代码在数字信号处理中,常用的数字滤波方法有以下几种:1) 移动平均滤波(Moving Average Filter):将输入信号的过去N 个样本的平均值作为输出样本的值。
这种滤波器可以有效地平滑信号,但对于快速变化的信号可能引入较大的延迟。
2) 中值滤波(Median Filter):将输入信号的过去N个样本的中间值作为输出样本的值。
中值滤波器可以有效地去除噪声,但对于快速变化的信号可能引入较大的失真。
3) 低通滤波(Lowpass Filter):通过去除高频成分来平滑信号。
常用的低通滤波器有巴特沃斯滤波器、切比雪夫滤波器等。
以下是Python中实现这些滤波方法的简单源代码示例:移动平均滤波方法:```pythondef moving_average_filter(input_signal, window_size):filtered_signal = []for i in range(len(input_signal) - window_size + 1):window = input_signal[i:i+window_size]filtered_signal.append(sum(window) / window_size)return filtered_signal```中值滤波方法:```pythondef median_filter(input_signal, window_size):filtered_signal = []for i in range(len(input_signal) - window_size + 1):window = input_signal[i:i+window_size]filtered_signal.append(sorted(window)[window_size//2])return filtered_signal```低通滤波方法:```pythonimport scipy.signal as signaldef lowpass_filter(input_signal, cutoff_freq, fs):nyquist_freq = 0.5 * fsnormalized_cutoff_freq = cutoff_freq / nyquist_freqb, a = signal.butter(4, normalized_cutoff_freq, btype='low') filtered_signal = signal.lfilter(b, a, input_signal)return filtered_signal```注意:以上代码示例仅为简单实现,并未考虑边界情况和参数校验等细节。

10种简单的数字滤波算法(C语言源程序)1、限幅滤波法(又称程序判断滤波法)A、方法:根据经验判断,确定两次采样允许的最大偏差值(设为A)每次检测到新值时判断:如果本次值与上次值之差<=A,则本次值有效如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次值B、优点:能有效克服因偶然因素引起的脉冲干扰C、缺点无法抑制那种周期性的干扰平滑度差#define A 10char value;char filter(){char new_value;new_value = get_ad();if ( ( new_value - value > A ) || ( value - new_value > A )return value;return new_value;}2、中位值滤波法A、方法:连续采样N次(N取奇数)把N次采样值按大小排列取中间值为本次有效值B、优点:能有效克服因偶然因素引起的波动干扰对温度、液位的变化缓慢的被测参数有良好的滤波效果C、缺点:对流量、速度等快速变化的参数不宜#define N 11char filter(){char value_buf[N];char count,i,j,temp;for ( count=0;count<N;count++){value_buf[count] = get_ad();delay();}for (j=0;j<N-1;j++){for (i=0;i<N-j;i++){if ( value_buf[i]>value_buf[i+1] ){temp = value_buf[i];value_buf[i] = value_buf[i+1];value_buf[i+1] = temp;}}}return value_buf[(N-1)/2];}3、算术平均滤波法A、方法:连续取N个采样值进行算术平均运算N值较大时:信号平滑度较高,但灵敏度较低N值较小时:信号平滑度较低,但灵敏度较高N值的选取:一般流量,N=12;压力:N=4B、优点:适用于对一般具有随机干扰的信号进行滤波这样信号的特点是有一个平均值,信号在某一数值范围附近上下波动C、缺点:对于测量速度较慢或要求数据计算速度较快的实时控制不适用比较浪费RAM#define N 12char filter(){int sum = 0;for ( count=0;count<N;count++){sum + = get_ad();delay();}return (char)(sum/N);}4、递推平均滤波法(又称滑动平均滤波法)A、方法:把连续取N个采样值看成一个队列队列的长度固定为N每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据.(先进先出原则)把队列中的N个数据进行算术平均运算,就可获得新的滤波结果N值的选取:流量,N=12;压力:N=4;液面,N=412;温度,N=14B、优点:对周期性干扰有良好的抑制作用,平滑度高适用于高频振荡的系统C、缺点:灵敏度低对偶然出现的脉冲性干扰的抑制作用较差不易消除由于脉冲干扰所引起的采样值偏差不适用于脉冲干扰比较严重的场合比较浪费RAM#define N 12char value_buf[N];char i=0;char filter(){char count;int sum=0;value_buf[i++] = get_ad();if ( i == N ) i = 0;for ( count=0;count<N,count++)sum = value_buf[count];return (char)(sum/N);}5、中位值平均滤波法(又称防脉冲干扰平均滤波法)A、方法:相当于“中位值滤波法”+“算术平均滤波法”连续采样N个数据,去掉一个最大值和一个最小值然后计算N-2个数据的算术平均值N值的选取:3~14B、优点:融合了两种滤波法的优点对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点:测量速度较慢,和算术平均滤波法一样比较浪费RAM#define N 12char filter(){char count,i,j;char value_buf[N];int sum=0;for (count=0;count<N;count++) {value_buf[count] = get_ad(); delay();}for (j=0;j<N-1;j++){for (i=0;i<N-j;i++){if ( value_buf[i]>value_buf[i+1] ) {temp = value_buf[i];value_buf[i] = value_buf[i+1]; value_buf[i+1] = temp;}}}for(count=1;count<N-1;count++) sum += value[count];return (char)(sum/(N-2));}6、限幅平均滤波法A、方法:相当于“限幅滤波法”+“递推平均滤波法”每次采样到的新数据先进行限幅处理,再送入队列进行递推平均滤波处理B、优点:融合了两种滤波法的优点对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点:比较浪费RAM略参考子程序1、37、一阶滞后滤波法A、方法:取a=0~1本次滤波结果=(1-a)本次采样值+a上次滤波结果B、优点:对周期性干扰具有良好的抑制作用适用于波动频率较高的场合C、缺点:相位滞后,灵敏度低滞后程度取决于a值大小不能消除滤波频率高于采样频率的1/2的干扰信号#define a 50char value;char filter(){char new_value;new_value = get_ad();return (100-a)value + a new_value;}8、加权递推平均滤波法A、方法:是对递推平均滤波法的改进,即不同时刻的数据加以不同的权通常是,越接近现时刻的数据,权取得越大。

常用的8种数字滤波算法摘要:分析了采用数字滤波消除随机干扰的优点,详细论述了微机控制系统中常用的8种数字滤波算法,并讨论了各种数字滤波算法的适用范围。
关键词:数字滤波;控制系统;随机干扰;数字滤波算法1引言在微机控制系统的模拟输入信号中,一般均含有各种噪声和干扰,他们来自被测信号源本身、传感器、外界干扰等。
为了进行准确测量和控制,必须消除被测信号中的噪声和干扰。
噪声有2大类:一类为周期性的,其典型代表为50 Hz 的工频干扰,对于这类信号,采用积分时间等于20 ms整倍数的双积分A/D转换器,可有效地消除其影响;另一类为非周期的不规则随机信号,对于随机干扰,可以用数字滤波方法予以削弱或滤除。
所谓数字滤波,就是通过一定的计算或判断程序减少干扰信号在有用信号中的比重,因此他实际上是一个程序滤波。
数字滤波器克服了模拟滤波器的许多不足,他与模拟滤波器相比有以下优点:(1)数字滤波器是用软件实现的,不需要增加硬设备,因而可靠性高、稳定性好,不存在阻抗匹配问题。
(2)模拟滤波器通常是各通道专用,而数字滤波器则可多通道共享,从而降低了成本。
(3)数字滤波器可以对频率很低(如0.01 Hz)的信号进行滤波,而模拟滤波器由于受电容容量的限制,频率不可能太低。
(4)数字滤波器可以根据信号的不同,采用不同的滤波方法或滤波参数,具有灵活、方便、功能强的特点。
2 常用数字滤波算法数字滤波器是将一组输入数字序列进行一定的运算而转换成另一组输出数字序列的装置。
设数字滤波器的输入为X(n),输出为Y(n),则输入序列和输出序列之间的关系可用差分方程式表示为:其中:输入信号X(n)可以是模拟信号经采样和A/D变换后得到的数字序列,也可以是计算机的输出信号。
具有上述关系的数字滤波器的当前输出与现在的和过去的输入、过去的输出有关。
由这样的差分方程式组成的滤波器称为递归型数字滤波器。
如果将上述差分方程式中bK取0,则可得:说明输出只和现在的输入和过去的输入有关。
这种类型的滤波器称为非递归型数字滤波器。
参数aK、bK的选择不同,可以实现低通、高通、带通、带阻等不同的数字滤波器。
2.1算术平均值滤波算术平均值滤波是要寻找一个Y,使该值与各采样值X(K)(K=1~N)之间误差的平方和为最小,即:这时,可满足式(3)。
式(4)便是算术平均值滤波的算法。
设第二次测量的测量值包含信号成分Si和噪声成分Ci,则进行N次测量的信号成分之和为:噪声的强度是用均方根来衡量的,当噪声为随机信号时,进行N次测量的噪声强度之和为:式(5)和式(6)中,S、C分别表示进行N次测量后信号和噪声的平均幅度。
这样对N次测量进行算术平均后的信噪比为:其中,S/C是求算术平均值前的信噪比。
因此采用算术平均值后,使信噪比提高了倍。
算术平均值法适用于对一般具有随机干扰的信号进行滤波,这种信号的特点是有一个平均值,信号在某一数值范围附近作上下波动,此时仅取一个采样值作依据显然是不准确的,如压力、流量、液平面等信号的测量。
但对脉冲性干扰的平滑作用尚不理想,因此他不适用于脉冲性干扰比较严重的场合。
由式(7)可知,算术平均值法对信号的平滑滤波程度完全取决于N。
当N较大时,平滑度高,但灵敏度低,即外界信号的变化对测量计算结果Y的影响小;当N较小时,平滑度低,但灵敏度高。
应视具体情况选取N,以便既少占用计算时间,又达到最好的效果,如对一般流量测量,可取N=8~16,对压力等测量,可取N=4。
2.2 加权平均值滤波算术平均值法对每次采样值给出相同的加权系数,即1/N。
但有些场合为了改进滤波效果,提高系统对当前所受干扰的灵敏度,需要增加新采样值在平均值中的比重,即将各采样值取不同的比例,然后再相加,此方法称为加权平均值法。
一个N项加权平均式为:常数C1,C2,…,CN的选取是多种多样的,其中常用的是加权系数法,即:加权平均值法适用于系统纯滞后时间常数τ较大、采样周期较短的过程,他给不同的相对采样时间得到的采样值以不同的权系数,以便能迅速反应系统当前所受干扰的严重程度。
但采用加权平均值法需要测试不同过程的纯滞后时间τ,同时要不断计算各权系数,增加了计算量,降低了控制速度,因而他的实际应用不如算术平均值法广泛。
2.3滑动平均值滤波以上平均滤波算法有一个共同点,即每计算1次有效采样值必须连续采样N次。
对于采样速度较慢或要求数据计算速率较高的实时系统,这些方法是无法使用的。
例如A/D数据,数据采样速率为每秒10次,而要求每秒输入4次数据时,则N不能大于2。
滑动平均值法只采样1次,将本次采样值和以前的N -1次采样值一起求平均,得到当前的有效采样值。
滑动平均值法把N个采样数据看成一个队列,对列的长度固定为N,每进行一次新的采样,把采样结果放入队尾,而扔掉原来队首的一个数据,这样在队列中始终有N个“最新”的数据。
计算滤波值时,只要把队列中的N个数据进行平均,就可得到新的滤波值。
滑动平均值法对周期性干扰有良好的抑制作用,平滑度高,灵敏度低;但对偶然出现的脉冲性干扰的抑制作用差,不易消除由于脉冲干扰引起的采样值的偏差。
因此他不适用于脉冲干扰比较严重的场合,而适用于高频振荡系统。
通过观察不同N值下滑动平均的输出响应来选取N值,以便既少占用时间,又能达到最好的滤波效果。
其工程经验值为:流量N取12,压力N取4,液面N取4~12,温度N取1~4。
2.4中值滤波中值滤波是对某一被测参数连续采样N次(一般N取奇数),然后把N次采样值从小到大,或从大到小排队,再取其中间值作为本次采样值。
中值滤波对于去掉偶然因素引起的波动或采样器不稳定而造成的误差所引起的脉冲干扰比较有效,对温度、液位等变化缓慢的被测参数采用此法能收到良好的滤波效果,但对流量、速度等快速变化的参数一般不易采用。
2.5 防脉冲干扰平均值滤波在脉冲干扰比较严重的场合,若采用一般的平均值法,则干扰将“平均”到计算结果中去,故平均值法不易消除由于脉冲干扰而引起的采样值偏差。
防脉冲干扰平均值法先对N个数据进行比较,去掉其中的最大值和最小值,然后计算余下的N-2个数据的算术平均值。
即:在实际应用中,N可取任何值,但为了加快测量计算速度,N一般不能太大,常取为4,即为四取二再取平均值法。
他具有计算方便、速度快、存储量小等特点,故得到了广泛应用。
2.6程序判断滤波工程实践表明,许多物理量的变化都需要一定的时间,相邻两次采样值之间的变化有一定的限度。
程序判断滤波就是根据实践经验确定出相邻两次采样信号之间可能出现的最大偏差ΔY,若超出此偏差值,则表明该输入信号是干扰信号,应该去掉;若小于此偏差值,可将信号作为本次采样值。
当采样信号由于随机干扰,如大功率用电设备的启动或停止,造成电流的尖峰干扰或误检测,以及变送器不稳定而引起的严重失真等,可采用程序判断法进行滤波。
程序判断滤波根据滤波方法的不同,可分为限幅滤波和限速滤波2种。
2.6.1 限幅滤波限幅滤波把两次相邻的采样值相减,求出其增量(以绝对值表示),然后与两次采样允许的最大差值(由被控对象的实际情况决定)ΔY进行比较,若小于或等于ΔY,则取本次采样值;若大于ΔY,则仍取上次采样值作为本次采样值。
即:限幅滤波主要用于变化比较缓慢的参数,如温度、物理位置等测量系统。
具体应用时,关键的问题是最大允差ΔY的选取,ΔY太大,各种干扰信号将“乘虚而入”,使系统误差增大;ΔY太小,又会使某些有用信号被“拒之门外”,使计算机采样效率变低。
因此,门限值ΔY的选取是非常重要的。
通常可根据经验数据获得,必要时也可由实验得出。
2.6.2限速滤波限速滤波最多可用3次采样值来决定采样结果,设顺序采样时刻t1,t2,t3的采样值分别为Y(1),Y(2),Y(3),则限速滤波较为折中,既照顾了采样的实时性,又顾及了采样值变化的连续性。
但这种方法也有明显的缺点:(1)△Y的确定不够灵活,必须根据现场的情况不断更换新值;(2)不能反映采样点数N>3时各采样值受干扰的情况,因而其应用受到一定的限制。
具体应用时,可用(|Y(1)-Y(2)|+|Y(2)-Y(3)|)/2作为ΔY,这样也可基本保持限速滤波的特性,虽增加计算量,但灵活性提高了。
2.7低通滤波将普通硬件RC低通滤波器的微分方程用差分方程来表示,便可以用软件算法来模拟硬件滤波的功能。
经推导,低通滤波算法如下:其中,X(K)为本次采样值;Y(K-1)为上次的滤波输出值;α为滤波系数,其值通常远小于1;Y(K)为本次滤波的输出值。
由式(13)可以看出,本次滤波的输出值主要取决于上次滤波的输出值(注意不是上次的采样值,这和加权平均滤波是有本质区别的),本次采样值对滤波输出的影响是比较小的,但多少有些修正作用。
这种算法模拟了具有较大惯性的低通滤波功能,当目标参数为变化很慢的物理量时,效果很好,但他不能滤除高于1/2采样频率的干扰信号。
除低通滤波外,同样可用软件来模拟高通滤波和带通滤波。
2.8 复合数字滤波为了进一步提高滤波效果,有时可以把2种或2种以上不同滤波功能的数字滤波器组合起来,组成复合数字滤波器,或称多级数字滤波器。
例如防脉冲干扰平均值滤波就是一种应用实例,由于这种滤波方法兼顾了中值滤波和算术平均值滤波的优点,所以无论对缓慢变化的信号,还是对快速变化的信号,都能获得较好的滤波效果。
此外,也可采用双重滤波的方法,即把采样值经过低通滤波后,再经过一次高通滤波。
这样,结果更接近理想值,这实际上相当于多级RC滤波器。
3结语本文讨论了8种数字滤波算法,每种滤波算法都有其各自的特点,在实际应用中,究竟选取哪一种数字滤波算法,应根据具体的测量参数合理的选用。
不适当地应用数字滤波,不仅达不到滤波效果,反而会降低控制品质,甚至失控,这点必须予以注意。