六旋翼无人机系统
- 格式:docx
- 大小:578.38 KB
- 文档页数:27
六旋翼飞行器飞行原理
六旋翼飞行器是一种具有六个旋翼的无人机,它通过旋转六个螺旋桨产生的升力来实现飞行。
这种飞行器的飞行原理可以简单地归纳为"旋翼产生升力,控制旋翼转速来实现飞行方向的调整"。
六旋翼飞行器中的每个旋翼都通过电动机驱动,使其快速旋转。
旋翼的旋转产生了气流,这种气流对着旋翼产生的螺旋桨叶片施加了一个向上的力,也就是升力。
通过控制旋翼的转速,可以控制升力的大小,从而实现飞行器的升降。
六旋翼飞行器通过调整旋翼的旋转速度来实现飞行方向的调整。
当飞行器需要向前飞行时,它会增加前方的旋翼转速,使得飞行器倾斜向前,而向后飞行则相反。
通过控制旋翼转速的差异,可以实现飞行器的转向、左右平移等操作。
六旋翼飞行器还配备了多个传感器和控制系统,以保证飞行器的稳定性和安全性。
例如,陀螺仪可以感知飞行器的姿态,从而调整旋翼转速来保持平衡;加速度计可以感知飞行器的加速度,从而调整旋翼转速来保持稳定。
这些传感器和控制系统的配合使得飞行器能够在空中保持平稳飞行。
六旋翼飞行器的飞行原理是依靠旋翼产生的升力和控制旋翼转速来实现飞行方向的调整。
通过精确控制旋翼的转速和调整飞行器的姿态,六旋翼飞行器能够实现高度灵活的飞行,并广泛应用于航拍、
搜救等领域。
六旋翼无人机飞行原理
六旋翼无人机是一种采用六个电动马达和旋翼组成的飞行器。
六旋翼无人机的飞行原理是通过电动马达带动旋翼高速旋转,产生上推力,从而使无人机升空并实现平稳飞行。
六旋翼无人机采用的是旋翼的飞行方式。
旋翼是一种产生升力的设备,它的旋转使空气产生向下的压力,从而使飞机升空。
六旋翼无人机采用的是六个旋翼,比四旋翼多两个旋翼,能够更好地保持平衡,并具有更好的机动性能和稳定性能。
六旋翼无人机采用的是电动马达产生动力。
电动马达是通过电能转化成机械能,带动旋翼旋转产生上推力。
六旋翼无人机的电动马达需要具有高功率和高效率,能够产生足够的推力以支持无人机的飞行。
六旋翼无人机还采用了先进的控制系统。
控制系统可以通过无线电通讯,实现对无人机的遥控和自主控制。
遥控器可以通过无线电信号,控制无人机的上下、前后、左右和旋转方向。
自主控制则是通过内置的传感器和计算机,实现对无人机的自主飞行和导航。
六旋翼无人机还具有良好的稳定性能。
六旋翼无人机采用的是六个旋翼,比四旋翼多两个旋翼,能够更好地保持平衡,并具有更好的机动性能和稳定性能。
此外,六旋翼无人机还采用了先进的控制系统,能够实现对无人机的精确控制和稳定飞行。
六旋翼无人机的飞行原理是通过电动马达带动旋翼高速旋转,产生上推力,从而使无人机升空并实现平稳飞行。
它采用了先进的控制系统,能够实现对无人机的遥控和自主控制,并具有良好的稳定性能。
未来,六旋翼无人机将会被广泛应用于物流配送、农业植保、环境监测和消防救援等领域,成为未来无人机市场的重要组成部分。
本科毕业设计题目:六旋翼农用无人机设计学院:工学院姓名:学号:专业:年级:指导教师:二零一四年五月摘要本次设计主题为“六旋翼农用无人机模型设计”,结合我国当前农业机械化发展现状,通过对命题的分析得到了更加清晰开阔的设计思路,设计作品具有系统性、实用性和创新性。
针对多旋翼农用无人机,本文确定了“六旋翼农用喷药、航拍功能无人机”的设计说明书,介绍了无人机的设计过程,主要通过概念性论述,经过对无人机结构研究、分析的整体把握,以结构、动力、控制三部分进行设计,并结合实际通过对多旋翼农用无人机设想进行结构改进、设计优化以提高设计的应用性,这种方法对类似产品的设计制造同样具有借鉴作用。
设计方案包括无人机整体机架、喷药机构等,并给出了CAD设计图、整体装配图PRO/E等内容,确保无人机结构简单、适用灵活、便于普及、成本低廉等。
关键词:六旋翼农用无人机模型;CAD;PRO/EAbstractThe design theme for the "six rotor UAV model design of agricultural", combining the current situation of agriculture mechanization development, through the analysis of the proposition of the design ideas more clearly open, design work is systematic, practical and innovative.For multi rotor agricultural UAV, the "design specification of six rotor agricultural spraying, aerial functional UAV", introduces the design process of UAV, mainly through the concept of exposition, according to the study, no machine structure analysis in whole, to structure, power, control three parts design, combined with the the actual rotor UAV based on agricultural ideas for optimization design of structure improvement, so as to improve the application of design, this method also has a good effect on the design and manufacture of similar products.Design includes the UAV the whole machine, spraying device, and gives the design drawings, the overall assembly drawing etc., ensure that the UAV has the advantages of simple structure, flexible application, convenient, low cost etc...Keywords: six rotor UAV model design of agricultural;CAD;PRO/E目录Abstract (2)目录 (3)一、绪论 (4)多旋翼农用无人机的发展简史 (4)多旋翼农用无人机的发展现状与展望 (5)二、六旋翼农用无人机的机体与喷施结构设计 (7)1、六旋翼农用无人机整体基本构造设计 (7)2、六旋翼农用无人机喷施设备的基本构造设计与工作原理 (8)3、六旋翼农用无人机的自平衡原理 (8)三、六旋翼农用无人机的动力系统与工作原理 (10)动力系统基本组成 (10)驱动电动机与电子调速器: (11)1、驱动电机参数的确定以及巡航时间的计算 (12)1.1 无人机电机的选择 (12)1.2 无人机的工作时间 (13)1.3 螺旋桨的设计 (14)1.4 螺旋升力的计算: (15)2、电调的使用 (15)3、PCB电子集合板、陀螺仪、摄像及遥控传感器设备应用 (16)四、六旋翼农用无人机的保养与保管 (21)参考文献 (22)致谢 (23)一、绪论随着社会生产力的进一步提高,农用航空飞机,是利用微型飞机和喷施设备进行农业作业的机械,它除了用来喷洒农药和化学除草剂、作物激素及脱叶剂等药液外,还可以进行观察农情等作业。

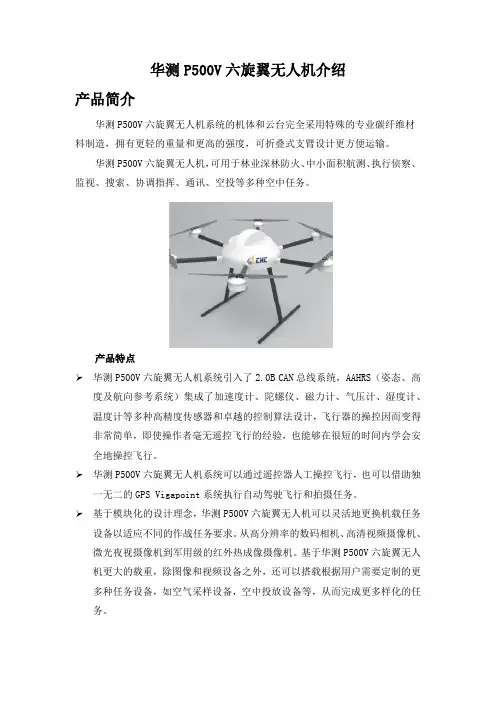
华测P500V六旋翼无人机介绍产品简介华测P500V六旋翼无人机系统的机体和云台完全采用特殊的专业碳纤维材料制造,拥有更轻的重量和更高的强度,可折叠式支臂设计更方便运输。
华测P500V六旋翼无人机,可用于林业深林防火、中小面积航测、执行侦察、监视、搜索、协调指挥、通讯、空投等多种空中任务。
产品特点华测P500V六旋翼无人机系统引入了2.0B CAN总线系统,AAHRS(姿态、高度及航向参考系统)集成了加速度计、陀螺仪、磁力计、气压计、湿度计、温度计等多种高精度传感器和卓越的控制算法设计,飞行器的操控因而变得非常简单,即使操作者毫无遥控飞行的经验,也能够在很短的时间内学会安全地操控飞行。
华测P500V六旋翼无人机系统可以通过遥控器人工操控飞行,也可以借助独一无二的GPS Vigapoint系统执行自动驾驶飞行和拍摄任务。
基于模块化的设计理念,华测P500V六旋翼无人机可以灵活地更换机载任务设备以适应不同的作战任务要求。
从高分辨率的数码相机、高清视频摄像机、微光夜视摄像机到军用级的红外热成像摄像机。
基于华测P500V六旋翼无人机更大的载重,除图像和视频设备之外,还可以搭载根据用户需要定制的更多种任务设备,如空气采样设备,空中投放设备等,从而完成更多样化的任务。
华测P500V六旋翼无人机拥有优秀的安全设计,任何时候只要停止遥控器操作,飞行器就会自动悬停在空中。
如果遥控器信号中断时间超过30秒或者电池电量过低,飞行器就会自动缓慢迫降到地面或按照预定方案自动应对。
遥控信号受到干扰时,飞行器可以自动按原路返航。
飞控系统可以完整记录所有飞行相关数据信息,用于准确诊断飞行器故障判断飞行器事故原因。
华测P500V六旋翼无人机的动力系统拥有业内最强的野外环境适应性,可以在最高5级风下正常工作。
经过专业机构的严格高压电磁环境测试,华测P500V六旋翼无人机被确认在高压电磁环境下具有良好的抗干扰性和安全性,通过专业机构的EMC电磁环境兼容认证.技术参数一体化地面站华测P500V 六旋翼无人机地面站将电脑系统、通讯系统、视频系统、整合为一体,产品具有良好的便携性和环境适应性。
基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术研究随着无人机技术的迅速发展,六旋翼飞行器作为其中一种重要的类型,具有广泛的应用前景。
然而,六旋翼飞行器的飞行控制问题一直是研究的热点之一。
为了提高六旋翼飞行器的飞行性能和稳定性,研究人员提出了各种各样的控制方法。
本文将重点研究基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术。
动态逆控制是一种常用的控制方法,它通过将系统的非线性动力学模型转化为一个线性的模型来实现控制。
然而,由于六旋翼飞行器具有高度非线性和复杂的动力学特性,传统的动态逆控制方法往往难以满足其控制要求。
为了解决这个问题,本文提出了一种自适应动态逆控制方法。
首先,利用Pixhawk飞控板采集的传感器数据,获取六旋翼飞行器的状态信息。
然后,利用这些数据构建一个精确的非线性动力学模型,将其作为逆控制器的输入。
接着,通过自适应学习算法对逆控制器进行参数调整和优化,以实现对六旋翼飞行器的精确控制。
最后,利用实验验证了该方法的有效性。
实验结果表明,基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术具有明显的优势。
与传统的动态逆控制方法相比,该方法能够更准确地模拟六旋翼飞行器的非线性动力学特性,并能够在不同工况下实现精确控制。
此外,该方法还具有较强的鲁棒性和适应性,能够有效应对飞行器系统参数变化和外部干扰。
综上所述,基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术具有广泛的应用前景。
它为六旋翼飞行器的飞行控制问题提供了一种新的解决方案,能够提高飞行性能和稳定性,为无人机技术的发展做出贡献。
然而,该方法仍然存在一些问题和挑战,需要进一步的研究和改进。
相信随着技术的不断发展和创新,基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术将会得到更广泛的应用和推广。

六旋翼物流无人机造型设计方案
六旋翼物流无人机的设计方案可以考虑以下几个方面:
1. 六旋翼结构:可以采用具有良好稳定性和操控性的六旋翼结构,以确保无人机在各种气象条件下都能平稳飞行。
2. 机身材质:选择轻量化的材质,如碳纤维复合材料,以提高无人机的载重能力和飞行效率。
3. 机身外观设计:可以采用流线型外观设计,减少飞行时的空气阻力,提高飞行速度和稳定性。
4. 机身尺寸:根据物流需求,设计合适尺寸的无人机,以容纳不同大小的货物。
5. 抗风能力:考虑到物流无人机需要在各种复杂气象条件下飞行,设计方案应考虑提高无人机的抗风能力,以保证飞行的稳定性和安全性。
6. 动力系统:选择高效的电动动力系统,以提供足够的动力和长飞行时间。
7. 载重系统:设计合理的载重系统,包括承载货物的舱室、固定装置和安全锁定装置,以保证货物在飞行过程中的安全性。
8. 操控系统:配置先进的操控系统,包括自动驾驶和遥控操控功能,以确保无人机可以安全地飞行和交付货物。
总之,六旋翼物流无人机的设计方案应兼顾飞行性能、载重能力、稳定性和安全性,以满足物流需求并提高无人机的工作效率。
HC 蜂巢航宇科技(北京)有限公司山东蜂巢航空科技有限公司H C/P D022501-2019 HC-332H油电混合六旋翼无人机技术规格书联系电话:010-836866102019年02月25日产品部整理发布版本版本修改日期责任人说明V1.02019.02.25温小青系统编写HC-332技术规格书V1.12019.05.14尤冰冰修改HC-332技术规格书V1.32019.09.03勾柯楠添加了无机臂尺寸,更换了地面站及CAM-M30产品图片V1.42020.05.18陈晨更新了任务设备系统V1.52020.09.10陈晨将遥控器更换为思翼遥控器V1.62020.12.21陈晨将发动机更换为GX-2发动机V1.72021.03.12修改部分参数问题汇签编制人:编制日期:审核人:审核日期:批准人:批准日期:目录1主题内容和适用范围 (1)2HC-332六旋翼无人机系统概述 (1)2.1系统特点 (1)2.2典型应用领域 (2)3系统组成 (2)4分系统设备技术指标及说明 (3)4.1飞行平台 (3)4.2动力装置 (6)4.3电气系统 (8)4.4飞行控制系统 (8)4.5任务设备系统(选配) (9)4.5.1HHOP-V4倾斜摄影立体测绘相机 (9)4.5.2Q10TIR-35(10倍双光跟踪吊舱) (11)4.5.3Q30TIR(30倍双光跟踪吊舱) (13)4.5.4Q30T Pro(30倍跟踪吊舱) (17)4.5.5Q30TM(30倍跟踪激光测距吊舱) (19)4.5.6Z5S微单一体机云台 (20)4.6通讯与数据链系统 (22)4.6.1DL-10图数一体链路(电动巡检版标配) (22)4.6.2DL-30图数一体链路(混动巡检版标配) (24)4.6.3DT-6数传电台(测绘版标配) (25)4.7地面控制站及地面保障设备 (26)4.7.1遥控器 (26)4.7.2笔记本地面站(航测版标配) (28)4.7.3GCS-D01双屏移动式地面站(巡检版标配).294.7.4集成便携箱 (30)4.7.5备品备件 (31)4.8使用保管环境条件 (31)4.9系统典型使用过程 (31)4.10保障和服务 (32)4.10.1现场保障 (32)4.10.2基地保障 (33)4.11售后服务 (33)4.12培训和资料 (33)4.13系统配置清单 (34)1主题内容和适用范围本技术规格书规定了HC-332无人机系统的技术状态、技术指标和检验验收方法,作为订货方和供货方签订合同、进行验收交付时的技术状态依据。
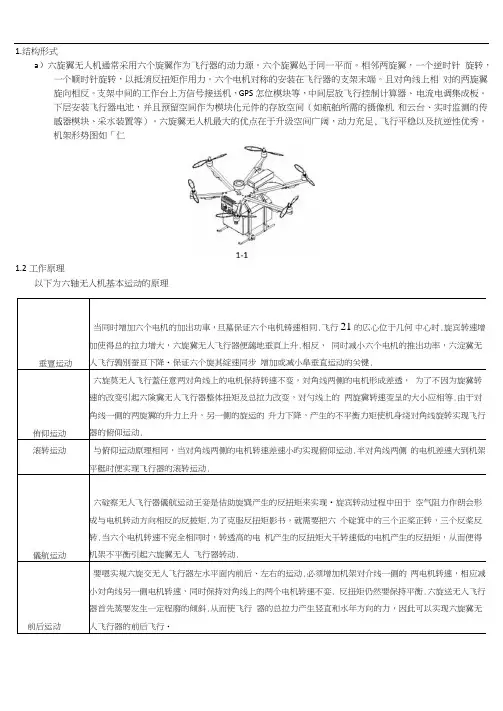
1.结构形式
a)六旋翼无人机通常采用六个旋翼作为飞行器的动力源。
六个旋翼处于同一平而。
相邻两旋翼,一个逆时针旋转,一个顺时针旋转,以抵消反扭矩作用力。
六个电机对称的安装在飞行器的支架末端。
且对角线上相对的两旋翼旋向相反。
支架中间的工作台上方信号接送机,GPS怎位模块等,中间层放飞行控制计算器、电流电调集成板。
下层安装飞行器电池,并且预留空间作为模块化元件的存放空间(如航舶所需的摄像机和云台、实时监测的传感器模块、采水装置等)。
六旋翼无人机最大的优点在于升级空间广阔,动力充足, 飞行平稳以及抗逆性优秀。
机架形势图如「仁
1.2工作原理
以下为六轴无人机基本运动的原理
1.3机架与叶桨的选择
1.3.1桨叶的选择
如图2・1所示,在旋翼桨叶上任惠収足够短的长度dr,设桨叶半能为b,合速度为w, 螺旋角为(X,由升力公式,得:
P • d • b • dr
对流角进行近似计算后导出一下公式
J/fr-.l/.v(m + m )、卩(旳尸叔・R
■ * ™ ,
由此等式可知,螺旋桨的阻力扭转,英大小取决于桨叶的螺旋角和桨叶表面的粗糙程度,现拟左1255MOTOR 碳纤维桨作为无人机的工作桨。
1.3.2机架的选择。
系留无人机是基于六旋翼飞行器研发的一款适合长时间滞空的无人飞行平台。
该系留无人机由六旋翼飞行器、系留机载电源、智能电缆收放装置、地面大功率电能变送模组等构成。
该系留平台解决了电池容量对旋翼飞行器续航时间的限制,实现旋翼无人机的长时间滞空。
技术特点
➢大于8小时的长时间续航
➢100米升空高度
➢安全后备电池切换
➢轻型复合系缆技术
➢智能线缆收放控制
➢3000W功率变送
➢安全高吞吐量光纤数据传输(带光纤版本)
➢具有自动跟随功能
主要用途
➢特殊现场长时间监控
➢无线中继节点
➢交通道路远距离监控
➢赛事长时间现场播报
➢森林防火及农场监控
➢工业现场监控及空气质量检测
1 / 1。
十六旋翼无人机动力计算摘要:一、无人机动力计算的重要性二、十六旋翼无人机的特点三、动力计算的公式与方法四、动力计算的实例应用五、结果分析与讨论六、总结与展望正文:无人机作为一种现代化的航空器,广泛应用于军事、民用和商业领域。
在这些领域中,动力计算是设计和优化无人机性能的关键环节。
本文以十六旋翼无人机为例,介绍动力计算的相关知识。
十六旋翼无人机具有稳定性好、操控性强、载荷能力高等特点,使其在多种应用场景中脱颖而出。
然而,如何准确地计算其动力性能,以满足不同场景的需求,仍需深入研究。
动力计算主要包括推力、扭矩和功率三个方面的计算。
其中,推力计算公式为:F = T * g / (2 * r),其中T 为扭矩,g 为螺旋桨的角速度,r 为螺旋桨的半径。
扭矩计算公式为:T = P * 9.81 / (2 * r * n),其中P 为功率,n 为螺旋桨的转速。
功率计算公式为:P = F * v,其中F 为推力,v 为无人机的速度。
为了更好地理解这些计算方法,我们以一款典型的十六旋翼无人机为例,进行动力计算的实例应用。
假设该无人机的螺旋桨半径为r = 0.1 米,转速为n = 1000转/分钟,速度为v = 10米/秒。
根据上述公式,我们可以计算出推力、扭矩和功率分别为:推力F = 13.12 牛顿,扭矩T = 124.3 瓦特,功率P = 131.2 瓦特。
通过动力计算,我们可以对无人机的性能进行全面的分析与讨论。
例如,在不同的飞行场景下,如何选择合适的螺旋桨尺寸、转速和数量,以达到最佳的性能组合。
此外,动力计算还可以为无人机的设计和改进提供依据。
总之,动力计算在十六旋翼无人机的设计和应用中具有重要意义。
本文详细介绍了动力计算的公式与方法,并通过实例应用进行了说明。
华测P500V六旋翼无人机介华测PV六旋翼无人机介绍产品简介华测PV六旋翼无人机系统的机体和云台完全采用特殊的专业碳纤维材料制造,拥有更轻的重量和更高的强度,可折叠式支臂设计更方便运输华测PV六旋翼无人机,可用于林业深林防火、中小面积航测、执行侦察、监视、搜索、协调指挥、通讯、空投等多种空中任务产品特点华测PV六旋翼无人机系统引入了总线系统,集成了加速度计、陀螺仪、磁力计、气压计、湿度计、温度计等多种高精度传感器和卓越的控制算法设计,飞行器的操控因而变得非常简单,即使操作者毫无遥控飞行的经验,也能够在很短的时间内学会安全地操控飞行华测PV六旋翼无人机系统可以通过遥控器人工操控飞行,也可以借助独一无二的系统执行自动驾驶飞行和拍摄任务基于模块化的设计理念,华测PV六旋翼无人机可以灵活地更换机载任务设备以适应不同的作战任务要求从高分辨率的数码相机、高清视频摄像机、微光夜视摄像机到军用级的红外热成像摄像机基于华测PV六旋翼无人机更大的载重,除图像和视频设备之外,还可以搭载根据用户需要定制的更多种任务设备,如空气采样设备,空中投放设备等,从而完成更多样化的任务华测PV六旋翼无人机拥有优秀的安全设计,任何时候只要停止遥控器操作,飞行器就会自动悬停在空中如果遥控器信号中断时间超过30秒或者电池电量过低,飞行器就会自动缓慢迫降到地面或按照预定方案自动应对遥控信号受到干扰时,飞行器可以自动按原路返航飞控系统可以完整记录所有飞行相关数据信息,用于准确诊断飞行器故障判断飞行器事故原因华测PV六旋翼无人机的动力系统拥有业内最强的野外环境适应性,可以在最高5级风下正常工作经过专业机构的严格高压电磁环境测试,华测PV六旋翼无人机被确认在高压电磁环境下具有良好的抗干扰性和安全性通过专业机构的电磁环境兼容认证技术参数机架电机电调可折叠螺旋桨飞行参数对称电机轴距:mm 单臂长度:中心架直径:mm 壳子质量: g外壳尺寸: x x 16mm起落架尺寸:mm×mm×mm 最外尺寸: mm x mm xmm 展开最大: mm x mm x mm 定子尺寸:50×14mm Kv值:/V 最大功率:W 重量:工作电流:30A 工作电压:6S兼容信号频率:30Hz ~ Hz 驱动频率:8 重量(含散热器):30g 材质高强度工程塑料尺寸:15× 重量:13g起飞重量:5 0Kg ~ 标准载荷:最大载荷:3kg整机重量:动力电池:第2页/共4页充电箱子外场包装箱最大功耗:W悬停功耗:W( 起飞重量6Kg时)悬停时间;25 最大垂直上升速度:6m/s 自动巡航速度:6-10m/s抗风能力最大:5 级-/s 工作环境温度: -5 °C ~ +40 °C 工作极限温度:-20 °C ~ +55 °C 存储环境稳定:-20 °C ~ ~65 °C尺寸:长56cm 宽 37cm 高 23cm 重量:11kg尺寸:宽高重量:一体化地面站华测PV六旋翼无人机地面站将电脑系统、通讯系统、视频系统、整合为一体,产品具有良好的便携性和环境适应性英特尔® 酷睿 i5-M 处理器," HD 阳光下可读的多点触控显示屏,2GB 3,硬盘 GB,背光照明薄膜键盘,防震可插拔硬盘,抗震耐摔设计,工作温度: -20°C 到60°C一体化地面站是华测PV六旋翼无人机系统的重要组成部分,最主要的功能是接收华测PV六旋翼无人机上发射的视频信号和各种状态信号,可实现飞行数据实时接收、监视、报警与回放,黑匣子飞行数据分析,自动驾驶程序编辑,支持第3页/共4页配置清单及报价序号 1 2 3 4 5 6 7 8 9 10 11 12 13产品名称PV六轴飞行器飞控系统三轴云台相机T8FG遥控器图传 7寸监视器全版充电器开关电源电池检测仪 6s 飞行器运输箱地面站电脑总价:数量 1 1 1 1 1 1 1 2 1 1 万备注第4页/共4页。
六旋翼无人机原理
六旋翼无人机是一种利用了六个旋转的螺旋桨来实现垂直起降、悬停以及高度控制的无人机。
其工作原理基于物理学里的牛顿第三定律以及空气动力学的基本原理。
首先,六旋翼无人机的螺旋桨是通过电机驱动进行旋转的,每个螺旋桨都可以独立地控制旋转速度和方向。
通过同时调节六个螺旋桨的转速和方向,可以实现无人机的稳定的垂直起降和悬停。
根据牛顿第三定律,当旋转的螺旋桨产生向下的推力时,相对应的无人机就会受到一个向上的反作用力。
通过调节螺旋桨的转速和受力方向,可以控制无人机的上升和下降。
同时,通过调整不同螺旋桨的转速和受力方向,可以实现无人机的向前、向后、向左、向右的运动。
空气动力学原理是六旋翼无人机工作的关键。
螺旋桨旋转产生的推力和对空气的阻力产生了一个力和力矩,使得无人机能够在空中保持平衡。
由于六个螺旋桨呈对称分布,可以使得无人机维持稳定的飞行姿态。
为了提高稳定性和操控性,六旋翼无人机通常配备了陀螺仪、加速度计、磁力计等传感器,用于感知无人机的姿态和运动状态。
根据传感器提供的数据,无人机可以自动地调整螺旋桨的转速和受力方向,以保持稳定的飞行。
总之,六旋翼无人机利用六个旋转的螺旋桨通过控制转速和受
力方向实现垂直起降、悬停和运动。
通过空气动力学原理和传感器的帮助,无人机能够保持稳定的飞行姿态和操控性。
六轴无人机研究与设计毕业设计一、什么是六轴无人机六轴无人机是一种飞行器,由六个电动机和对应的旋翼组成。
每个旋翼都可以独立控制,以实现飞行器的平衡和姿态控制。
六轴无人机通常采用多旋翼结构,通过电机带动旋翼产生升力,从而实现垂直起降、悬停和飞行。
二、为什么选择六轴无人机作为研究对象选择六轴无人机作为研究对象的原因有多个方面。
首先,相比于其他类型的无人机,六轴无人机具有更好的操控性和稳定性。
其独立控制的六个旋翼可以提供更灵活的姿态控制能力,使得飞行器在复杂环境中能够更好地适应和执行任务。
其次,六轴无人机广泛应用于各个领域,包括航拍摄影、农业植保、物流配送等,因此对其性能和设计的研究具有实际应用价值。
三、六轴无人机的研究内容和设计要求有哪些在六轴无人机的研究中,主要关注以下几个方面的内容:姿态控制、飞行控制、传感器集成和通信系统设计等。
姿态控制包括确定无人机的姿态和控制其稳定飞行,需要设计合适的控制算法和传感器集成方案。
飞行控制涉及无人机的起飞、降落、悬停和导航等功能,需要设计相应的飞行控制系统和路径规划算法。
传感器集成涉及将各种传感器(如加速度计、陀螺仪、气压计等)与飞控系统进行集成和优化。
通信系统设计关乎无人机与地面控制站之间的通信,需要设计可靠和高效的通信协议和数据传输方案。
设计六轴无人机需要满足以下要求:首先,飞行器的结构设计要合理,旋翼的安装位置和角度需要精确计算和调整,以保证飞行器的稳定性和姿态控制能力。
其次,飞行控制系统需要具备高精度和高可靠性,能够实现准确的飞行控制和路径规划。
再次,传感器集成需要确保传感器的准确度和灵敏度,以提供准确的姿态信息和环境感知数据。
最后,通信系统需要具备高速率和稳定的通信能力,以实现与地面控制站的可靠通信。
四、六轴无人机毕业设计的实施步骤和关键技术有哪些六轴无人机毕业设计的实施步骤主要包括以下几个方面:首先,进行问题分析和需求分析,明确设计目标和要求。
其次,进行相关技术研究和文献综述,了解当前六轴无人机的研究进展和存在的问题。
六旋翼无人机系统技术文件一、产品名称:六旋翼无人机系统二、X-6是全新研制的六旋翼无人机系统,具有载重能力较强、续航时间理想、与X-8无人机相比,体积更小、重量较轻、目标特性小,使用更加快捷、机动灵活、操作使用及维修简便等特点,自成体系独立执行电力巡检任务,稳定度与性能相对x-8无人机稍有逊色。
简介:X-6 无人机是由专业无人机技术研发团队经过多年研究、测试,最新推出的一款全球同类产品载重量最大、可垂直起降、拥有多项专利的无人飞行系统。
1)选用自主驾驶设备,大大提高飞控稳定性。
2)可携带多种任务载荷。
3)可用于执行资料收集、测量、检测、侦查等多种空中任务,在电力巡检领域能发挥其高效、隐蔽性强的特点,能对目标物进行远距离监视。
产品特点:(1)飞行器具有遥控、自主飞行能力,可以实时修改飞行航路和任务设置;(2)测控与信息传输设备具有遥控、实时信息传输的功能,具有多机、多站兼容工作及一定的抗截获、抗干扰能力;(3)侦察任务设备能昼夜实时获取目标图像信息,具有手动、自动控制工作模式,可迅速发现、捕获、识别、跟踪目标;(4)飞行控制与信息处理站具有对飞行器进行遥控飞行和对机载任务设备进行操控的功能,具有飞行参数/航迹显示、航路规划和实时修改飞行计划、重新设置任务样式的能力;具有通过视频眼镜实现第一视角控制飞行的能力;具有接收标准视频信号、实时处理/存储图像、数据叠加等能力,具有目标定位和引导打击的能力,且能与上级指挥机关、情报处理中心和指挥系统相通连;(5)地面保障设备具有简易检测、维修与训练的能力,具有快速更换易损件、备用动力电池组和双模态充电的功能;(6)全系统外场展开迅速,具有车载大范围机动和携行能力。
机体结构技术参数:1.1无刷电机及电调系统技术参数:型号:V4010450KVKV:375槽数,极数::18N24P电机外径: Φ44.5mm电机长度:27.5mm出轴直径:3.17mm净重:105g 不含线重量: 125g (含长线重)22.2V空载电流: 1.2A @ 22.2V内阻: 71mΩ电调系统采用分立式设计,各元器件采用集成化设计,具有体积小、重量轻、引出线和焊接点少、寿命长、可靠性高、性能好等优点。
图像输出:一路模拟PAL/NTSC自适应,Full D1画质,720×576像素语音输出:一路立体声,左右两个声道
接收门限: -105dBm(10-6 BER @2 MHz信道宽度);
-104dBm(10-6 BER @4MHz信道宽度)
供电电源: AC220V,功耗小于8W
单位名称:深圳市*科技有限公司文档编号
文档文名称:★★★★★★★★
★★文档密级
★★★★
★
文档制订陈先生
分享资料,共同进度文档审核周小姐
5机载无线数字视频传输系统
产品特点:
1、端到端超低延时(小于300ms)
2、具有体积小特点(最轻170g),适合在对体积有要求的设备中安装,如无人机,机器人等
3、具有ABS发射加密功能
单位名称:深圳市*科技有限公司文档编号
文档文名称:★★★★★★★★
★★文档密级
★★★★
★
文档制订陈先生
分享资料,共同进度文档审核周小姐单位名称:深圳市*科技有限公司文档编号
文档文名称:★★★★★★★★
★★文档密级
★★★★
★
文档制订陈先生
分享资料,共同进度文档审核周小姐
结束。