蒙德驱动器主轴MF调试步骤
- 格式:docx
- 大小:46.06 KB
- 文档页数:4
蒙德驱动器主轴(MF)调试步骤蒙德驱动器主轴(MF )调试步骤⼀.上电前检查检查驱动器的接线是否和设计要求相符合,接线是否可靠连接,并予以确认后,⽅可上电。
接线图详见附件。
⼆. 参数设置以及⾃学习:(空载或者轻载的情况下)1. 输⼊密码OP8=00002.初始化OP4=0,按两下;OP4=100, 按两下。
(出⼚已经设置好)P2.加减速时间P3.ASR特性在电机不振动的情况下尽量调⼤P3.01-P3,.03,调⼩P3.04-P3.06,以提⾼刚性和响应性P4.位置伺服P5.模拟量输⼊调整P6.脉冲输⼊控制P7.主轴定位完成之后按运⾏/停⽌进⾏键复位,⽤⼿转动电机主轴,同时监视U2.06有没有的脉冲值0~360.0变化,有则可以进⾏⾃学习;如果没有,请检查编码器线缆。
4. ⾃学习⽤OP3=2进⾏旋转型⾃学习线间电阻及电机漏抗%、以及电机的空载电流,⾃学习期间操作⾯板显⽰为实时电流,⾃学习成功之后驱动器回到最初界⾯。
若不成功,请阅读说明书5-6进⾏查看和处理。
三.试运⾏:进⼊OP6,⾯板显⽰可以设置试运⾏的频率,设定好频率之后,长按着电机将以设定的频率正向运⾏;长按着运⾏时,驱动器显⽰界⾯会⾃动从频率显⽰变化到实时电流显⽰,正反转电流接近⼤⼩则为正常。
注:如果试运⾏过程中电机振动,请将E5.01、E5.02、E5.03的增益参数设⼩再试运⾏同时检查电机参数以及编码器参数有没有设错。
试运⾏正常之后就可以接⼊系统由系统来控制。
附件:接线图5.5KW及以下(⼩机壳):三相电源340-420V50/60HzCN2端⼝(控制脉冲输⼊/脉冲反馈输出)模拟量输⼊/输出接⼝晶体管输出接⼝DC48V 50mA以下7.5KW及以上(⼤机壳):TM2端⼝三相电源340-420V 50/HzTS ~+10V 』以下TM3端⼝(模拟量输出接⼝)TM1端⼝(功能输出接⼝)TM3端⼝30mA30m 以下』~+10V 』。
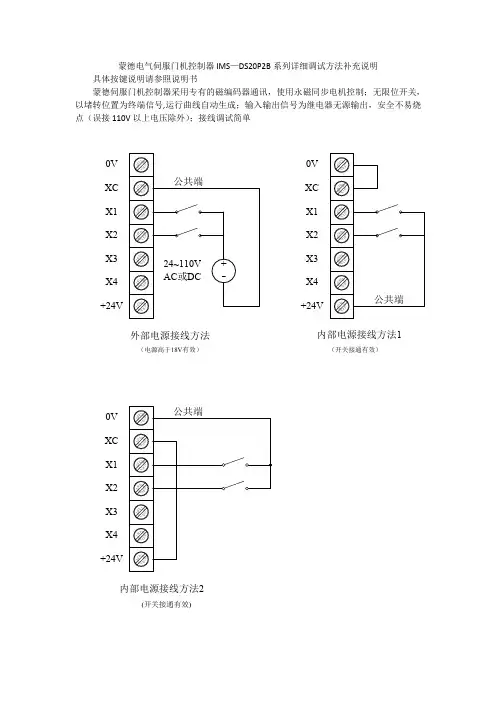
蒙德电气伺服门机控制器IMS —DS20P2B 系列详细调试方法补充说明 具体按键说明请参照说明书蒙德伺服门机控制器采用专有的磁编码器通讯,使用永磁同步电机控制;无限位开关,以堵转位置为终端信号,运行曲线自动生成;输入输出信号为继电器无源输出,安全不易烧点(误接110V 以上电压除外);接线调试简单+24VX1X2X3X4XC 0V+24VX1X2X3X4XC 0V外部电源接线方法内部电源接线方法1(电源高于18V有效)(开关接通有效)+24VX1X2X3X4XC 0V 内部电源接线方法2(开关接通有效)情况1:无操作器时运行调试方法(出厂默认配置时,新机,已调试好后出现运行不当或不能运行)1.上电前确保sw2开关拨到on位置(试运行模式)后再上电。
12.把sw3开关拨到off(选择自学习磁极模式),按下自学习按钮进行电机磁极自学习,此时ready/error灯亮,当驱动器面板上ready/error灯熄灭即完成.23.把sw3开关拨到on(选择自学习门宽模式),按下自学习按钮后应作开关门动作,关门到位后完成,至此驱动器应能正常工作。
34.若要回到系统中正常运行则把sw2开关拨到off位置。
5.开/关门速度调整电位器旋钮OPEN SPEED/CLOSE SPEED。
运行到终端时的保持力矩大小调整电位器旋钮HOLD。
门板堵转力大小调整电位器旋钮OBSTRUCTION。
注1:若上电后驱动器ready/error灯闪烁,请检查是否未接编码器;若POWER高压灯不亮,驱动器有故障,请与厂家联系。
注2:此过程若出现ready/error灯闪烁,则可能为编码器(干扰、通讯故障等)或电机(缺相等)有问题。
检查接线正确且没有断线或更换编码器后再学习.注3:若没有开关门动作,然后ready/error灯闪烁,则门宽自学习错误.重新上电后可尝试重新自学习电机磁极和把堵转电位器旋钮OBSTRUCTION向+方向旋转,加大堵转力矩的检测。
TAPPING CENTER主轴包套调试手册By : 新代数控Date : 2012/02/6Ver : 1.6版本更新记录目录一、摘要 (4)二、硬件规格确认 (5)1、相关硬件 (5)2、主轴相关需要用到的外部I/O点 (5)三、连接 (6)1、驱动、电机与新代的连接 (6)2、布线注意要点 (7)四、系统主轴相关参数设定 (8)五、蒙德变频器调试步骤: (9)1、准备参数 (9)2、请按照以下建议值设定 (9)3、自学习调试 (10)4、应用参数调整 (11)5、辅助参数调整 (12)6、主轴定位调试 (13)六、常见问题排查(Q&A) (14)七、附件 (15)1、驱动器常见警报 (15)2、状态监视参数 (16)一、摘要本手册是TAPPING CENTER针对以下驱动器和马达规格的调试手册,内容包括:硬件规格确认、硬件连接、系统主轴相关参数设定、变频器调试步骤以及常见问题排查五个部分,制定此手册的目的在于让新代和机械厂技术人员在使用手工调试主轴包套时使用,也可以作为熟悉新代主轴包套的学习资料。
二、硬件规格确认1、相关硬件表一:2、主轴相关需要用到的外部I/O点表三:三、连接1、驱动、电机与新代的连接下表提供回生电阻的选配资料供参考。
表四:注意:功率的选用要考虑主轴的减速时间和惯量p∝T*ω,在主轴做高减速刚攻时会释放大量的能量必须使用大功率电阻方可承但,如果机台用长时间连续刚攻的需要,制动电阻上还要加装冷却风扇,不然止动电租可能会因过热而烧坏。
2、布线注意要点a、电盘配电时请将编码器信号线和动力线分开走线,尽量让编码器线与动力线保持距离,以避开干扰源。
b、建议在编码器线上增加磁环,增强抗干扰能力。
c、做到编码器屏蔽线双端接地。
四、系统主轴相关参数设定说明:参数26设定4,表示此主轴的运转指令,由控制器轴卡的P4接口送出,因此驱动器的指令连接线须连接P4口。
参数66设定此主轴伺服规划之每转分辨率,此参数需与参数1651设定相同。

异步机载重实验方法
1)载重调试从空载慢车开始调整(在电梯已经做好平衡的条件下)首先:空载下行(拉对重),观察U1.05的值(电流)稳速时电流值应约等于额定电流的70%,当然略小于70%对后来的载重有利
第二:如果电流偏大,请修正一下变频器电机滑差值E2.08,值略小于计算出来的电机滑差值
第三:修正好电流值后换为自动运行状态
2)转为快车后的载重调试
首先:试验载重50%(一般不会出现故障)
第二:试载75%(一般也不会出现故障)如果75%试载出现故障,则回到慢车空载调试电流
第三:试100%满载运行可能会出现OS和OL类报警。
解决办法有
1,加大空载电流值令空载电流=50%额定电流。
.
2,增大L3.02的值设为200;增大L3.03的值设为2;;或把电机参数E2.03中的值加2 A 。
一般可通过100%载重的检测
第四:试载110%~125%时出现OS和OL类报警的解决办法如下
在使用过100%载重解决办法的前提下将参数L3.01和L4.01设为0,继续经行载重实验,如果仍然出现保护则将E5.03设置为50,积分时间E5.06设置为10。
.如果再不行则将A2.01改为3继续进行实验。
蒙德电气伺服门机控制器IMS-DS20P2B系列详细调试方法补充说明
情况1:无操作器时运行调试方法(出厂默认配置时,新机,已调试好后出现运行不当或不能运行)
1.上电前确保sw2开关拨到on位置(试运行模式)后再上电。
2.把sw3开关拨到off(选择自学习磁极模式),
按下自学习按钮进行电机磁极自学习,此时ready/error灯亮,当驱动器面板上ready/error灯熄灭即完成。
3.把sw3开关拨到on(选择自学习门宽模式),按下自学习按钮后应作开关门动作,关门到位后完成,至此驱动器应能正常工作。
4.若要回到系统中正常运行则把sw2开关拨到off位置。
5.开/关门速度调整电位器旋钮OPEN SPEED/CLOSE SPEED。
运行到终端时的保持力矩大小调整电位器旋钮HOLD。
门板堵转力大小调整电位器旋钮OBSTRUCTION。
注1:若上电后驱动器ready/error灯闪烁,请检查是否未接编码器;若POWER高压灯不亮,驱动器有故障,请与厂家联系。
注2:此过程若出现ready/error灯闪烁,则可能为编码器(干扰、通讯故障等)或电机(缺相等)有问题。
检查接线正确且没有断线或更换编码器后再学习。
注3:若没有开关门动作,然后ready/error灯闪烁,则门宽自学习错误。
重新上电后可尝试重新自学习电机磁极和把堵转电位器旋钮OBSTRUCTION向+方向旋转,加大堵转力矩的检测。
若只开门后没有关门,则把SW1拨到相反方向即可。
产品运转前请认真阅读说明书,并请保存好,以便以后查阅。
M O D R O L E L E C T R I C C O .,L T D .蒙德IMS-MF 系列使用手册交流伺服驱动器安装接线及参数一览表400V 级1.5kW ~55kW(E)NO:JSWJ-01-21-02-01目录第1章使用铭牌说明………………………………………………………………………………1-1机型与尺寸……………………………………………………………………………1-2安装场所的确认与管理………………………………………………………………1-4安装方向与空间………………………………………………………………………1-5第2章接线连接周边机器…………………………………………………………………………2-1端子台的构成…………………………………………………………………………2-2相互接线………………………………………………………………………………2-4控制回路端子的功能…………………………………………………………………2-6FU-05*扩展卡…………………………………………………………………………2-9FU-08*扩展卡………………………………………………………………………2-10第3章数字式操作器和参数组的概要数字式操作器…………………………………………………………………………3-1参数组的概要…………………………………………………………………………3-4第4章参数一览表参数一览表与内容说明………………………………………………………………4-1监视参数………………………………………………………………………………4-2系统操作………………………………………………………………………………4-3应用参数………………………………………………………………………………4-4第5章报警检查报警检出………………………………………………………………………………5-1报警说明………………………………………………………………………………5-6第6章调试过程及功能应用试运行的操作…………………………………………………………………………6-1速度控制………………………………………………………………………………6-4位置控制………………………………………………………………………………6-5主轴定位………………………………………………………………………………6-6刚性攻丝………………………………………………………………………………6-8附录…………………………………………………………………………………6-10使用本章节说明驱动器到货时以及安装时的确认事项。
主轴动平衡调试的方法与步骤
主轴动平衡调试是指通过校正机床主轴的动平衡不平衡量,使机床在高速旋转时减小振动,提高加工质量和效率的一项工作。
下面是主轴动平衡调试的常用方法和步骤:
方法:
1. 静平衡方法:将主轴放置在两个支点之间,根据主轴自重的分布情况进行动平衡调整。
2. 半动平衡方法:通过在主轴上放置试重来调整平衡状态。
3. 动平衡方法:使用专业的动平衡机进行调整,将主轴固定在设备上,通过测量不平衡量来调整平衡状态。
步骤:
1. 准备工作:首先需要准备好动平衡机、试重、台车等设备,并确保设备的稳定性和准确性。
2. 安装主轴:将待调试的主轴装到动平衡机上,并保证主轴的固定稳定。
3. 测量不平衡量:启动动平衡机,通过传感器测量主轴的不平衡量,记录下初始结果。
4. 校正不平衡量:根据测量结果,采取相应的调整措施,如添加或移除试重等方式来调整主轴的平衡状态。
5. 重新测量:在调整完毕后,重新启动动平衡机,测量主轴的不平衡量,与初始结果进行对比,确认调整效果。
6. 完成调试:如果调整结果满足要求,则调试完成,否则继续进行调整,直至满足要求为止。
7. 调整记录:将调整过程中的测量和调整结果记录下来,作为参考和备案。
需要注意的是,主轴动平衡调试需要经验丰富的工程师进行操作,以确保调试效果和操作安全。
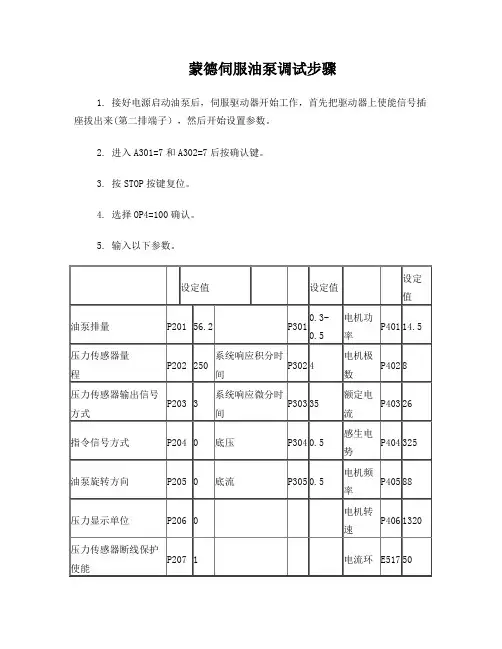
蒙德伺服油泵调试步骤
1. 接好电源启动油泵后,伺服驱动器开始工作,首先把驱动器上使能信号插座拔出来(第二排端子),然后开始设置参数。
2. 进入A301=7和A302=7后按确认键。
3. 按STOP按键复位。
4. 选择OP4=100确认。
5. 输入以下参数。
最高输出压力P2.08 175 C101 0.15 电机最高转速P209 1500
系统压力最大值P210 195
注:没有中文说明是固定值,有中文说明按机型不同可变的
6. 按STOP按键复位
7. 选择OP3=0后连续按两次确认键自学习完成后,OP3=3后连续按两次确认键自学习完成后,重新接上使能信号插座就可以其它动作,如无任何动作则需要在驱动器上任意调换两根电源线,重做OP3=3进行自学习。
TAPPING CENTER主轴包套调试手册By : 新代数控Date : 2012/02/6Ver : 1.6版本更新记录目录一、摘要 (4)二、硬件规格确认 (5)1、相关硬件 (5)2、主轴相关需要用到的外部I/O点 (5)三、连接 (6)1、驱动、电机与新代的连接 (6)2、布线注意要点 (7)四、系统主轴相关参数设定 (8)五、蒙德变频器调试步骤: (9)1、准备参数 (9)2、请按照以下建议值设定 (9)3、自学习调试 (10)4、应用参数调整 (11)5、辅助参数调整 (12)6、主轴定位调试 (13)六、常见问题排查(Q&A) (14)七、附件 (15)1、驱动器常见警报 (15)2、状态监视参数 (16)一、摘要本手册是TAPPING CENTER针对以下驱动器和马达规格的调试手册,内容包括:硬件规格确认、硬件连接、系统主轴相关参数设定、变频器调试步骤以及常见问题排查五个部分,制定此手册的目的在于让新代和机械厂技术人员在使用手工调试主轴包套时使用,也可以作为熟悉新代主轴包套的学习资料。
二、硬件规格确认1、相关硬件表一:2、主轴相关需要用到的外部I/O点表三:三、连接1、驱动、电机与新代的连接下表提供回生电阻的选配资料供参考。
表四:注意:功率的选用要考虑主轴的减速时间和惯量p∝T*ω,在主轴做高减速刚攻时会释放大量的能量必须使用大功率电阻方可承但,如果机台用长时间连续刚攻的需要,制动电阻上还要加装冷却风扇,不然止动电租可能会因过热而烧坏。
2、布线注意要点a、电盘配电时请将编码器信号线和动力线分开走线,尽量让编码器线与动力线保持距离,以避开干扰源。
b、建议在编码器线上增加磁环,增强抗干扰能力。
c、做到编码器屏蔽线双端接地。
四、系统主轴相关参数设定说明:参数26设定4,表示此主轴的运转指令,由控制器轴卡的P4接口送出,因此驱动器的指令连接线须连接P4口。
参数66设定此主轴伺服规划之每转分辨率,此参数需与参数1651设定相同。
蒙德电气伺服门机控制器IMS-DS20P2B 系列详细调试方法补充说明具体按键说明请参照说明书蒙德伺服门机控制器采用专有的磁编码器通讯,使用永磁同步电机控制;无限位开关,以堵转位置为终端信号,运行曲线自动生成;输入输出信号为继电器无源输出,安全不易烧点(误接110V 以上电压除外);接线调试简单+24VX1X2X3X4XC 0V+24VX1X2X3X4XC 0V外部电源接线方法内部电源接线方法1(电源高于18V有效)(开关接通有效)+24VX1X2X3X4XC 0V 内部电源接线方法2(开关接通有效)情况1:无操作器时运行调试方法(出厂默认配置时,新机,已调试好后出现运行不当或不能运行)1.上电前确保sw2开关拨到on位置(试运行模式)后再上电。
12.把sw3开关拨到off(选择自学习磁极模式),按下自学习按钮进行电机磁极自学习,此时ready/error灯亮,当驱动器面板上ready/error灯熄灭即完成。
23.把sw3开关拨到on(选择自学习门宽模式),按下自学习按钮后应作开关门动作,关门到位后完成,至此驱动器应能正常工作。
34.若要回到系统中正常运行则把sw2开关拨到off位置。
5.开/关门速度调整电位器旋钮OPEN SPEED/CLOSE SPEED。
运行到终端时的保持力矩大小调整电位器旋钮HOLD。
门板堵转力大小调整电位器旋钮OBSTRUCTION。
注1:若上电后驱动器ready/error灯闪烁,请检查是否未接编码器;若POWER高压灯不亮,驱动器有故障,请与厂家联系。
注2:此过程若出现ready/error灯闪烁,则可能为编码器(干扰、通讯故障等)或电机(缺相等)有问题。
检查接线正确且没有断线或更换编码器后再学习。
注3:若没有开关门动作,然后ready/error灯闪烁,则门宽自学习错误。
重新上电后可尝试重新自学习电机磁极和把堵转电位器旋钮OBSTRUCTION向+方向旋转,加大堵转力矩的检测。
蒙德驱动器主轴M F调
试步骤精编版
MQS system office room 【MQS16H-TTMS2A-MQSS8Q8-MQSH16898】
MF )调试步骤
一.上电前检查
检查驱动器的接线是否和设计要求相符合,接线是否可靠连接,并予以确认后,方可上电。
接线图详见附件。
二.参数设置以及自学习:(空载或者轻载的情况下)
1.输入密码OP8=0000
2.初始化OP4=0,按两下
RUN
;OP4=100,按两下
RUN。
(出厂已经设置好)
P2.加减速时间
特性
P4.位置伺服
P5.模拟量输入调整
P6.脉冲输入控制
P7.主轴定位
完成之后按运行/停止进行键复位,用手转动电机主轴,同时监视有没有的脉冲值0~变化,有则可以进行自学习;如果没有,请检查编码器线缆。
4.自学习
用OP3=2进行旋转型自学习线间电阻及电机漏抗%、以及电机的空载电流,自学习期间操作面板显示为实时电流,自学习成功之后驱动器回到最初界面。
若不成功,请阅读说明书5-6进行查看和处理。
三.试运行:
进入OP6
行时,驱动器显示界面会自动从频率显示变化到实时电流显示,正反转电流接近大小则为正常。
注:如果试运行过程中电机振动,请将、、的增益参数设小再试运行同时检查电机参数以及编码器参数有没有设错。
试运行正常之后就可以接入系统由系统来控制。
附件:接线图
及以下(小机壳):
及以上(大机壳):。
蒙德变频器说明书蒙德变频器说明书1. 简介蒙德变频器是一种用于电动机调速的设备。
它通过改变电源的频率来控制电动机的转速。
蒙德变频器具有调速范围宽、工作稳定、节能环保等特点,广泛应用于工业生产和其他领域。
2. 主要特点- 范围广:蒙德变频器可以实现从低转速到高转速的范围调节,满足不同工况下的要求。
- 稳定性好:蒙德变频器采用先进的控制算法,确保电动机运行稳定、无冲击。
- 节能环保:蒙德变频器可以根据实际负载情况调节电动机转速,实现节能效果。
- 安全可靠:蒙德变频器具备过载保护、短路保护、过压保护等安全功能,确保设备和人员安全。
3. 安装和使用蒙德变频器安装和使用时需要注意以下事项:3.1 安装- 安装前需仔细阅读本说明书,并确保电源和负载的匹配。
- 将蒙德变频器安装在通风良好的位置,并确保周围环境温度适宜。
- 确保安装牢固,防止产生振动和噪音。
3.2 连接电源和电动机- 按照蒙德变频器的输入和输出标识,正确连接电源和电动机。
- 确保接线牢固可靠,避免接触不良或接触不符合要求。
3.3 参数设置- 在使用蒙德变频器之前,需要根据实际负载情况进行参数设置。
- 建议参考本说明书中的参数设置部分进行操作,确保设备能够正常运行。
3.4 开机和关机- 开机前应检查各部分连接是否正常,确保安全可靠。
- 关机前应先停止电动机运行,然后切断电源。
4. 故障排除蒙德变频器可能出现以下故障,可按照以下步骤进行排除:4.1 无输出- 检查电源连接是否正确,确保电源正常供电。
- 检查参数设置是否正确,确保设备工作在正常范围内。
- 检查过载保护等安全功能是否触发,如果是,消除故障后重新启动。
4.2 过热- 检查环境温度是否过高,确保通风良好。
- 检查设备是否工作在额定负载范围内,是否存在过载情况。
4.3 其他故障- 如遇到其他故障,请及时联系售后服务部门进行维修。
5. 注意事项- 严禁将蒙德变频器用于不符合要求的场所或方式。
- 请定期对设备进行维护保养,确保设备的正常运行。
主轴动平衡调试的方法与步骤以主轴动平衡调试的方法与步骤为标题,本文将介绍主轴动平衡调试的基本原理、步骤以及注意事项,帮助读者了解如何进行有效的主轴动平衡调试。
一、主轴动平衡调试的基本原理主轴动平衡调试是通过对机械设备的主轴进行动平衡,以消除不平衡产生的振动和噪声,提高设备的运转精度和稳定性。
主轴动平衡调试的基本原理是根据质量不平衡的特点,通过在主轴上加上适当的质量,使主轴在高速运转时达到动平衡状态。
二、主轴动平衡调试的步骤1. 准备工作:在进行主轴动平衡调试之前,需要进行一些准备工作。
首先,要准备好主轴动平衡调试的仪器设备,例如动平衡仪、锤子、复合材料等。
其次,要检查主轴的安装情况和固定件,确保主轴安装牢固。
最后,要对主轴进行清洁,确保没有杂质。
2. 确定调试方案:根据实际情况,确定主轴动平衡调试的方案。
主轴动平衡调试的方案包括调试的目标、方法和步骤等。
根据主轴的特点和调试的要求,选择合适的调试方法和步骤。
3. 进行初步调试:在进行正式的主轴动平衡调试之前,需要进行初步的调试。
初步调试的目的是确定主轴的不平衡情况,为后续的调试提供依据。
初步调试可以使用简单的方法,例如观察主轴的运转情况,检测振动和噪声等。
4. 进行正式调试:在完成初步调试之后,可以进行正式的主轴动平衡调试。
正式调试需要使用专业的动平衡仪进行。
首先,将动平衡仪固定在主轴上,并启动设备。
然后,通过动平衡仪的测量,确定主轴的质量不平衡情况。
最后,根据测量结果,通过在主轴上加上适当的质量,使主轴达到动平衡状态。
5. 检验调试效果:在完成主轴动平衡调试之后,需要进行调试效果的检验。
检验的方法可以使用振动仪、噪声仪等。
通过检验,可以确定主轴的振动和噪声是否得到了有效的控制,以及调试效果是否达到了预期的要求。
三、主轴动平衡调试的注意事项1. 安全第一:在进行主轴动平衡调试时,要注意安全。
在调试过程中,要佩戴好防护用品,确保人身安全。
同时,要注意设备的安全操作,避免发生意外事故。
产品运转前请认真阅读说明书,并请保存好,以便以后查阅。
M O D R O L E L E C T R I C C O .,L T D .蒙德IMS-MF 系列使用手册交流伺服驱动器安装接线及参数一览表400V 级1.5kW ~55kW(E)NO:JSWJ-01-21-02-01目录第1章使用铭牌说明………………………………………………………………………………1-1机型与尺寸……………………………………………………………………………1-2安装场所的确认与管理………………………………………………………………1-4安装方向与空间………………………………………………………………………1-5第2章接线连接周边机器…………………………………………………………………………2-1端子台的构成…………………………………………………………………………2-2相互接线………………………………………………………………………………2-4控制回路端子的功能…………………………………………………………………2-6FU-05*扩展卡…………………………………………………………………………2-9FU-08*扩展卡………………………………………………………………………2-10第3章数字式操作器和参数组的概要数字式操作器…………………………………………………………………………3-1参数组的概要…………………………………………………………………………3-4第4章参数一览表参数一览表与内容说明………………………………………………………………4-1监视参数………………………………………………………………………………4-2系统操作………………………………………………………………………………4-3应用参数………………………………………………………………………………4-4第5章报警检查报警检出………………………………………………………………………………5-1报警说明………………………………………………………………………………5-6第6章调试过程及功能应用试运行的操作…………………………………………………………………………6-1速度控制………………………………………………………………………………6-4位置控制………………………………………………………………………………6-5主轴定位………………………………………………………………………………6-6刚性攻丝………………………………………………………………………………6-8附录…………………………………………………………………………………6-10使用本章节说明驱动器到货时以及安装时的确认事项。
MF )调试步骤
一.上电前检查
检查驱动器的接线是否和设计要求相符合,接线是否可靠连接,并予以确认后,方可上电。
接线图详见附件。
二.参数设置以及自学习:(空载或者轻载的情况下)
1.输入密码OP8=0000
2.初始化OP4=0,按两下
RUN
;OP4=100,按两下
RUN。
(出厂已经设置好)
P2.加减速时间
特性
在电机不振动的情况下尽量调大,.03,调小以提高刚性和响应性P4.位置伺服
P5.模拟量输入调整
P6.脉冲输入控制
P7.主轴定位
完成之后按运行/停止进行键复位,用手转动电机主轴,同时监视有没有的脉冲值0~变化,有则可以进行自学习;如果没有,请检查编码器线缆。
4.自学习
用OP3=2进行旋转型自学习线间电阻及电机漏抗%、以及电机的空载电流,自学习期间操作面板显示为实时电流,自学习成功之后驱动器回到最初界面。
若不成功,请阅读说明书5-6进行查看和处理。
三.试运行:
进入OP6
时,驱动器显示界面会自动从频率显示变化到实时电流显示,正反转电流接近大小则为正常。
注:如果试运行过程中电机振动,请将、、的增益参数设小再试运行同时检查电机参数以及编码器参数有没有设错。
试运行正常之后就可以接入系统由系统来控制。
附件:接线图
及以下(小机壳):
及以上(大机壳):。