计算机视觉复习题
- 格式:docx
- 大小:462.50 KB
- 文档页数:9
计算机视觉期末考试题及答案一、选择题1. 下列哪个是计算机视觉的基本任务?A. 物体识别B. 图像去噪C. 特征提取D. 图像压缩答案:A2. 图像分割的目标是什么?A. 将图像分成若干不重叠的区域B. 提取图像中的边缘和角点C. 对图像进行降噪处理D. 对图像进行缩放和旋转答案:A3. 下列哪个不属于计算机视觉中的特征提取方法?A. 边缘检测B. 霍夫变换C. SIFTD. 形态学操作答案:D4. 目标识别中最常用的算法是?A. 支持向量机(SVM)B. 卷积神经网络(CNN)C. 决策树D. 随机森林答案:B5. 计算机视觉中的光照问题指的是什么?A. 图像中的曝光问题B. 图像中的阴影和反射问题C. 图像中的亮度和对比度问题D. 图像中的色彩平衡问题答案:B二、填空题1. 图像的分辨率是指图像中的像素数量()图像的单位面积。
答案:除以2. 特征匹配算法中常用的匹配度量指标是()。
答案:距离3. 边缘检测算法中,经典的Sobel算子是基于()的。
答案:梯度4. 目标检测中的非极大值抑制是用来()。
答案:过滤掉重复的检测结果5. 目标跟踪中最常用的方法是()。
答案:卡尔曼滤波三、简答题1. 请简要解释计算机视觉中的图像金字塔是什么,并说明其应用场景。
答案:图像金字塔是一种多尺度表示的方法,通过对原始图像进行多次模糊和下采样,得到一系列分辨率不同的图像。
它的应用场景包括图像缩放、图像融合、目标检测等。
图像金字塔可以在不同尺度下对图像进行处理,以适应不同场景的需求。
2. 请简要介绍计算机视觉中的物体识别技术,并指出其挑战和解决方案。
答案:物体识别是指在图像或视频中自动识别出特定物体的技术。
其挑战包括光照变化、视角变化、遮挡等因素的影响。
解决方案包括利用深度学习方法进行特征提取和分类,使用数据增强技术增加训练数据,以及采用多模态融合的方法提高识别准确率。
3. 请简要解释计算机视觉中的图像分割技术,并说明常用的分割方法。
计算机视觉考试题及答案解析计算机视觉(Computer Vision),是研究如何使机器“看”的一门学科。
它涵盖了图像处理、模式识别、机器学习等多个领域。
作为计算机科学的重要分支之一,计算机视觉已经在各个领域得到了广泛的应用,包括人脸识别、图像搜索、无人驾驶等。
本文将介绍一些常见的计算机视觉考试题,并对答案进行解析。
一、选择题1.下列哪种方法可以实现图像分割?A. 边缘检测B. 直方图均衡化C. 图像降噪D. 全局阈值法答案:D。
图像分割是将图像划分为多个区域的过程,全局阈值法是一种常用的图像分割方法,通过设置一个合适的全局阈值,将图像中的像素分为两个类别。
2.计算机视觉中常用的特征描述子是什么?A. SIFTB. SURFC. HOGD. All of the above答案:D。
在计算机视觉中,SIFT(尺度不变特征变换)、SURF (加速稳健特征)和HOG(方向梯度直方图)都是常用的特征描述子,用于提取图像中的关键特征。
3.以下哪项不是深度学习在计算机视觉中的应用?A. 目标检测B. 图像分类C. 图像修复D. 人脸识别答案:C。
深度学习在计算机视觉中的应用非常广泛,包括目标检测、图像分类、人脸识别等,但不包括图像修复。
二、填空题1.卷积神经网络(CNN)是一种_________学习模型。
答案:深度。
2.在图像处理中,直方图均衡化是一种用于_____________的方法。
答案:增强图像对比度。
3.在目标检测中,R-CNN的全称是_________________。
答案:Region-based CNN。
三、解答题1.请简要解释计算机视觉中的目标跟踪是指什么?答:目标跟踪是指在连续的图像序列中,根据已有的目标位置信息,在下一帧图像中准确定位并跟踪目标的过程。
目标跟踪在视频监控、无人驾驶等领域中有着广泛的应用。
常用的目标跟踪方法包括基于特征的跟踪(如颜色、纹理等特征)和基于深度学习的跟踪(如Siamese网络、深度学习特征提取等)。
计算机视觉笔试题目及答案第一部分:基础理论题目一:请简要介绍计算机视觉的定义和应用领域。
计算机视觉是指利用计算机和相关技术对图像或视频进行处理、分析和理解的一门学科。
它与图像处理、模式识别、机器学习等领域密切相关。
计算机视觉的应用广泛,包括人脸识别、目标检测与跟踪、图像检索、三维重建等。
题目二:请简要说明计算机视觉系统的基本流程。
计算机视觉系统的基本流程包括图像获取、前期处理、特征提取与描述、目标检测与识别、结果输出等步骤。
首先,通过相机或其他设备获取图像或视频数据;然后对获取的图像或视频进行去噪、滤波等前期处理;接着进行特征提取与描述,即通过提取图像中的特征信息来表示图像内容;然后使用目标检测与识别算法来分析图像中的目标信息,识别出感兴趣的目标;最后将结果输出,如在屏幕上显示或保存到文件中。
题目三:简述计算机视觉中常用的特征描述符有哪些,并分别说明其原理。
常用的特征描述符包括SIFT(Scale-Invariant Feature Transform)、SURF(Speeded Up Robust Features)和ORB(Oriented FAST and Rotated BRIEF)等。
SIFT特征描述符是一种尺度不变的特征描述符。
它通过在不同尺度上检测和描述稳定的关键点,建立图像间的匹配关系。
具体原理是通过高斯差分算子检测图像中的极值点,并在每个极值点处计算局部方向直方图。
SURF特征描述符是一种加速的稳健特征描述符。
它通过构建尺度空间和积分图像,提取图像中的兴趣点,并计算其局部特征。
SURF特征描述符的主要优势是计算速度快,并具有一定的旋转和尺度不变性。
ORB特征描述符是一种具有方向性的快速特征描述符。
它结合了FAST特征点检测器和BRIEF描述符。
ORB特征描述符通过检测图像特征点的FAST角点,并在每个角点附近生成二进制字符串来描述特征。
第二部分:应用案例分析题目四:请选取计算机视觉在无人驾驶汽车领域的一个应用案例进行分析,并说明其实现原理。
计算机视觉笔试题库及答案一、选择题1. 在计算机视觉中,下面哪项不属于主要的图像特征描述算法?A. SIFT(尺度不变特征变换)B. HOG(方向梯度直方图)C. CNN(卷积神经网络)D. PCA(主成分分析)答案:D2. 以下哪种方法常用于图像分割任务?A. Canny边缘检测B. Haar特征检测C. 高斯滤波D. 彩色空间转换答案:A3. 在目标检测中,以下哪个算法是基于特征的分类器?A. YOLO(You Only Look Once)B. R-CNN(Region-CNN)C. SSD(Single Shot MultiBox Detector)D. Faster R-CNN答案:B4. 下面哪项是计算机视觉中的经典任务?A. 图像风格迁移B. 图像超分辨率C. 图像分类D. 图像降噪答案:C5. 在图像配准中,以下哪种方法可以用于检测图像之间的特征点匹配?A. SURF(加速稳健特征)B. RANSAC(随机抽样一致性)C. ORB(旋转差异二进制)D. Homography(单应性矩阵)答案:A二、填空题1. 在卷积神经网络中,通过不断迭代调整网络参数以使损失函数达到最小值的方法称为_____________。
答案:反向传播(Backpropagation)2. 图像分割通常可以将图像中的每个像素点标记为不同的___________________。
答案:目标或背景(Object or Background)3. 使用Canny边缘检测算法,可以得到__________________。
答案:图像的边缘信息4. 在目标检测中,非极大值抑制(Non-Maximum Suppression)用于__________________。
答案:从重叠的边界框中选择最佳的检测结果5. 在图像配准中,单应性矩阵(Homography Matrix)可以用于_________________。
答案:将一个图像在透视变换下转换到另一个图像上的映射关系三、简答题1. 请简要介绍一下SIFT算法的基本原理及应用领域。

可编辑修改精选全文完整版计算机视觉基础试题及答案第一部分:选择题1. 计算机视觉是指计算机具备的哪种能力?a) 看见和理解图像b) 感知周围环境c) 分析和识别物体d) 执行图像处理算法答案:a) 看见和理解图像2. 计算机视觉中常用的图像表示方法是什么?a) RGB表示b) HSL表示c) HSV表示d) CMYK表示答案:a) RGB表示3. 图像中的边缘是什么?a) 两个不同区域的分界线b) 图像中的明暗交界处c) 图像的主要特征点d) 图像中的高频部分答案:b) 图像中的明暗交界处4. 哪种算法常用于图像处理中的图像去噪?a) Sobel算子b) Canny边缘检测算法c) 高斯滤波器d) 傅里叶变换答案:c) 高斯滤波器5. 目标检测是计算机视觉中的一个重要任务,下列哪种方法常用于目标检测?a) 特征匹配b) 边缘检测c) 像素对比d) 颜色匹配答案:a) 特征匹配第二部分:填空题1. 图像的分辨率是指图像中的像素个数,通常用 _______ 表示。
答案:像素2. 计算机视觉中常用的图像特征描述算法是 _______。
答案:SIFT(尺度不变特征变换)3. 在图像处理中,将图像从RGB颜色空间转换到灰度颜色空间,常用的方法是 _______。
答案:加权平均法4. 机器学习中,常用的分类算法有决策树、支持向量机和_______。
答案:神经网络5. 图像分割是图像处理中的一个重要任务,常用的分割方法有阈值分割、区域生长和 _______。
答案:边缘检测第三部分:简答题1. 请简要说明计算机视觉在实际应用中的几个典型领域。
答案:计算机视觉在实际应用中广泛应用于人脸识别、车牌识别、视频监控、医学影像分析等领域。
在人脸识别中,计算机视觉可以通过检测脸部特征点来实现人脸识别;在视频监控中,计算机视觉可以实时分析视频图像,检测异常行为或目标物体;在医学影像分析中,计算机视觉可以辅助医生进行疾病诊断和治疗。
计算机视觉考试试题及答案一、选择题1.计算机视觉是指()。
A. 让计算机识别图像B. 让计算机生成图像C. 让计算机处理音频D. 让计算机播放视频答案:A. 让计算机识别图像2.在计算机视觉中,常用的图像处理技术包括()。
A. 图像去噪B. 图像分割C. 物体检测D. 所有选项都对答案:D. 所有选项都对3.以下哪项不是常用的计算机视觉库?A. OpenCVB. TensorFlowC. PyTorchD. Spring答案:D. Spring4.在计算机视觉中,卷积神经网络(CNN)常用于()。
A. 图像分类B. 文本处理C. 音频合成D. 数字识别答案:A. 图像分类二、判断题1.图像处理和计算机视觉是完全不同的两个领域。
答案:错2.计算机视觉只能应用于静态图像,无法处理视频流。
答案:错3.深度学习在计算机视觉领域取得了很大的成功。
答案:对三、简答题1.请简要介绍一下计算机视觉在实际生活中的应用场景。
答:计算机视觉在实际生活中有很多应用场景,比如人脸识别技术可以用于人脸解锁手机、安防监控等领域;医学影像分析可以帮助医生快速准确地诊断疾病;无人驾驶技术需要计算机视觉来实现障碍物检测和车道识别等功能。
2.简要说明卷积神经网络(CNN)在计算机视觉中的作用。
答:卷积神经网络(CNN)在计算机视觉中被广泛应用于图像分类、目标检测和图像分割等任务。
通过卷积层和池化层的组合,CNN可以提取图像的特征并实现对图像的有效处理和识别。
四、综合题1.请设计一个简单的计算机视觉项目,描述项目的实现步骤及预期效果。
答:设计一个人脸识别系统。
实现步骤包括收集人脸数据集、训练神经网络模型、部署模型到实际系统中。
预期效果是能够准确快速地识别不同人的人脸,并实现相关功能,比如门禁系统或会议签到系统等。
以上是计算机视觉考试试题及答案,希朓可以帮助您更好地理解和掌握计算机视觉领域的知识。
祝您考试顺利!。
可编辑修改精选全文完整版计算机视觉试题及答案第一部分:选择题1. 在计算机视觉中,图像处理主要通过哪些操作来提取有用的图像特征?a) 噪声抑制b) 边缘检测c) 特征提取d) 图像拼接答案:c2. 在计算机视觉中,常用的图像拼接算法是什么?a) 最近邻插值b) 双线性插值c) 双三次插值d) 原始图像拼接答案:b3. 在目标检测中,常用的算法是什么?a) Haar特征级联分类器b) SIFT算法c) SURF算法d) HOG特征描述子答案:a4. 在图像分割中,哪种算法可以将图像分割成不同的区域?a) K均值聚类算法b) Canny边缘检测算法c) 霍夫变换d) 卷积神经网络答案:a5. 在计算机视觉中,图像识别是通过什么来实现的?a) 特征匹配b) 图像分割c) 图像去噪d) 图像增强答案:a第二部分:填空题1. 图像的分辨率是指图像中的______。
答案:像素数量(或像素个数)2. 图像的直方图能够表示图像中不同______的分布情况。
答案:像素值(或亮度值)3. 图像处理中常用的边缘检测算子有______。
答案:Sobel、Prewitt、Laplacian等(可以列举多个)4. 在计算机视觉中,SURF算法中的SURF是什么的缩写?答案:加速稳健特征(Speeded-Up Robust Features)5. 在图像分割中,常用的阈值选择算法有______。
答案:Otsu、基于聚类的阈值选择等(可以列举多个)第三部分:问答题1. 请简述计算机视觉的定义及其应用领域。
答:计算机视觉是利用计算机对图像和视频进行理解和解释的研究领域。
它主要包括图像处理、图像分析、目标检测与跟踪、图像识别等技术。
应用领域包括机器人视觉、自动驾驶、安防监控、医学影像处理等。
2. 请简要描述图像处理中常用的滤波器有哪些,并说明其作用。
答:图像处理中常用的滤波器包括均值滤波器、中值滤波器、高斯滤波器等。
均值滤波器用于去除图像中的噪声,通过取邻域像素的平均值来减少噪声的影响;中值滤波器通过取邻域像素的中值来去除图像中的椒盐噪声;高斯滤波器通过对邻域像素进行加权平均来模糊图像,并且能够有效抑制高频噪声。
计算机视觉的基础知识测试计算机视觉是计算机科学领域中的一个重要分支,其研究目标是使计算机能够通过摄像头、视频等输入设备获取并理解图像或视频的内容。
了解计算机视觉的基础知识对于理解和应用这个领域的技术非常重要。
本文将通过一系列问题来测试读者对计算机视觉基础知识的掌握程度。
问题一:图像和视频的基本概念1. 请解释什么是像素(Pixel)?2. 图像的分辨率是什么意思?如何表示?3. 视频是由一系列静态图像组成的,请解释连续帧之间的关系是如何产生运动效果的?问题二:图像处理基础1. 请简要介绍灰度图像和彩色图像有什么区别?2. 常见的图像处理操作有哪些?请列举至少三个例子,并简要描述其作用。
3. 图像平滑操作是常见的图像处理方法之一,请解释它的原理和常用的实现方式。
问题三:计算机视觉算法1. 目标检测和目标跟踪是计算机视觉领域的重要任务,请简要介绍二者的区别。
2. 常见的目标检测算法有哪些?请列举至少两个,并简要描述其原理。
3. 请介绍一种常用的运动估计算法,并简要描述其原理和应用场景。
问题四:深度学习在计算机视觉中的应用1. 简要介绍卷积神经网络(CNN)在计算机视觉任务中的应用。
2. 目标语义分割是计算机视觉中的重要任务之一,请解释其与目标检测的区别。
3. 请介绍一种用于图像生成的深度学习模型,并简要描述其原理和应用。
问题五:计算机视觉的挑战和未来发展1. 计算机视觉在实际应用中面临的挑战有哪些?请列举至少两个。
2. 请简要介绍计算机视觉领域的未来发展方向。
以上问题覆盖了计算机视觉的基础知识、算法和应用,希望读者能通过回答这些问题来检验和加强对该领域的理解和学习。
计算机视觉作为一个快速发展的领域,不仅在学术界有广泛的研究,还在工业界有着广泛的应用前景。
相信随着技术的不断进步,计算机视觉将会在更多领域中发挥重要作用,改变人们的生活和工作方式。
文章到此结束,希望对您的计算机视觉基础知识测试有所帮助。
如果您还有任何问题或需要进一步了解,请随时联系我。
《计算机视觉》题集大题一:选择题1.下列哪项不属于计算机视觉的基本任务?A. 图像分类B. 目标检测C. 语音识别D. 语义分割2.在卷积神经网络(CNN)中,以下哪项操作不是卷积层的主要功能?A. 局部感知B. 权重共享C. 池化D. 特征提取3.下列哪个模型在图像分类任务中首次超过了人类的识别能力?A. AlexNetB. VGGNetC. ResNetD. GoogleNet4.以下哪个算法常用于图像中的特征点检测?A. SIFTB. K-meansC. SVMD. AdaBoost5.在目标检测任务中,IoU (Intersection over Union)主要用于衡量什么?A. 检测框与真实框的重叠程度B. 模型的检测速度C. 模型的准确率D. 模型的召回率6.下列哪项技术可以用于提高模型的泛化能力,减少过拟合?A. 数据增强B. 增加模型复杂度C. 减少训练数据量D. 使用更大的学习率7.在深度学习中,批归一化 (Batch Normalization)的主要作用是什么?A. 加速模型训练B. 提高模型精度C. 减少模型参数D. 防止梯度消失8.下列哪个激活函数常用于解决梯度消失问题?A. SigmoidB. TanhC. ReLUD. Softmax9.在进行图像语义分割时,常用的评估指标是?A. 准确率B. 召回率C. mIoU(mean Intersection over Union)D. F1分数10.下列哪个不是深度学习框架?A. TensorFlowB. PyTorchC. OpenCVD. Keras大题二:填空题1.计算机视觉中的“三大任务”包括图像分类、目标检测和______。
2.在深度学习模型中,为了防止梯度爆炸,常采用的技术是______。
3.在卷积神经网络中,池化层的主要作用是进行______。
4.YOLO算法是一种流行的______算法。
5.在进行图像增强时,常用的技术包括旋转、缩放、______和翻转等。
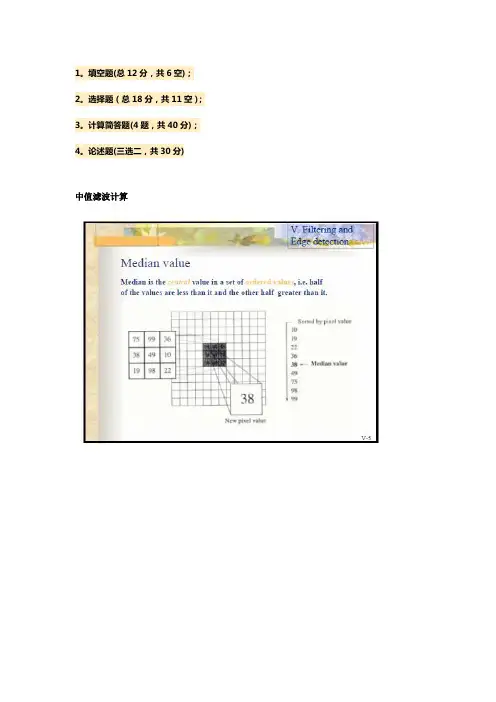
1。
填空题(总12分,共6空);2。
选择题(总18分,共11空);3。
计算简答题(4题,共40分);4。
论述题(三选二,共30分)中值滤波计算图像梯度、梯度方向计算Hough变换基本概念计算机视觉分层图像的特征(LC04.pdf)定义出图形的形状因子,能计算并说明图形的紧凑性(LC07)4连通和8连通的链码编码方法给定滤波器核模版,能对给定数字图像做增强运算图像直方图运算(LC03.pdf)下面大题三选二1。
图像中特定表情区域检测(给出设计方案)笑脸检测?用的是图像模糊识别技术!首先是面部捕捉。
它根据人的头部的部位进行判定,首先确定头部,然后判断眼睛和嘴巴等头部特征,通过特征库的比对,确认是面部,完成面部捕捉。
笑脸就好说了,完成了面部捕捉,然后开始判断嘴的上弯程度和眼的下弯程度,来判断是不是笑了。
以上所有的捕捉都是在对比特征库的情况下完成的,所以特征库是基础,里面有各种典型的面部和笑脸特征数据。
一种实用的笑脸检测方法/carson2005/article/details/85448592。
统计图像中特定图案数量(给出设计方案)连通区域分析,检测图形是否是带孔洞的,如果是实心的就不算,带孔洞的计数加一搜索到的资源,仅供参考:一种规则几何图形的计算机识别方法/p-444902661.html3。
基于极线几何的立体匹配方法极限几何如何匹配的问题(给出原理与步骤)极线如果曲线的切于A,B两点的切线相交于P点,那么P点称为直线AB关于该曲线的极点(pole),直线AB称为P点的极线(polar).极点和极线的思想是曲线上点和过该点切线的思想的一般化.任何一点关于一般的代数曲线都有一条极线,每一条直线都有一个极点.如果点在这条曲线上,那么极线就是曲线过该点的切线.在双目立体视觉测量中,立体匹配(对应点的匹配)是一项关键技术,极线几何在其中起着重要作用。
双目立体视觉系统中,有两个摄像机在不同角度拍摄物理空间中的一实体点,在两副图像上分别成有有两个成像点。
OpenCV计算机视觉基础教程试题及答案一、单项选择题(本大题共20小题,每小题1分,共20分)1、OpenCV创建于()年。
A、1997B、1998C、1999D、20002、OpenCV提供图像文件读写的模块是()A、coreB、imgcodecsC、imgprocD、highgui3、OpenCV使用()语言实现。
A、JavaB、C/C++C、PythonD、JavaScript4、NumPy中可用于表示无符号整数的数据类型是()。
A、int8B、uint16C、intpD、float5、NumPy中可用于创建单位矩阵的函数是()A、array()B、zeros()C、arange()D、ones()6、OpenCV用于将图像写入文件的函数是()A、imread()B、imshow()C、imwrite()D、VideoCapture()7、OpenCV用于绘制椭圆的函数是()A、line()B、circle()C、ellipse()D、polylines()8、OpenCV用于对图像执行透视变换的函数是()A、flip()B、resize()C、warpAffine()D、warpPerspective()9、OpenCV用于实现截断阈值处理的参数是()A、THRESH_BINARYB、THRESH_BINARY_INVC、THRESH_TRUNCD、THRESH_TOZERO10、下列关于轮廓查找的说法错误的是()A、findContours()函数只能从二值图像中查找图像轮廓。
B、findContours()函数返回一个list对象。
C、findContours()函数返回图像中的所有轮廓。
D、父级轮廓和子级轮廓之间是嵌套关系。
11、下列选项中,可返回轮廓长度的函数是()A、arcLength()B、contourArea()C、approxPolyDP()D、convexHull()12、下列选项中,适用于检测图像中的直线的函数是()A、Laplacian()B、Sobel()C、Canny()D、HoughLines()13、下列选项中,可返回2维直方图的函数是()A、hist()B、calcHist()C、createCLAHE()D、equalizeHist()14、使用分水岭算法分割图像时,不会执行的操作是()A、将原图像转换为灰度图像。
《计算机视觉》期末考试试卷附答案一、选择题(每题2分,共计20分)1. 计算机视觉的主要任务不包括以下哪项?A. 图像分类B. 目标检测C. 图像增强D. 图像分割{答案:C}2. 以下哪个不是卷积神经网络(CNN)的主要优点?A. 参数共享B. 局部感知野C. 需要大量标注数据D. 层次化特征提取{答案:C}3. 以下哪种损失函数常用于图像分类任务?A. softmax损失函数B. 交叉熵损失函数C. 均方误差损失函数D. hinge损失函数{答案:A}4. 在目标检测中,R-CNN系列算法主要包括以下哪些步骤?A. 区域提议网络B. 卷积神经网络特征提取C. 分类与边界框回归D. 非极大值抑制{答案:ABCD}5. 以下哪个是最常见的图像增强方法?A. 随机裁剪B. 直方图均衡化C. 对比度增强D. 数据扩充{答案:B}二、填空题(每题2分,共计20分)1. 在卷积神经网络中,卷积层的主要作用是______。
{答案:局部感知、参数共享、特征提取}2. 支持向量机(SVM)的核心思想是______。
{答案:找到一个最优的超平面,最大化不同类别之间的边界} 3. 目标检测中的实时性要求较高的算法有______。
{答案:YOLO、SSD、Faster R-CNN}4. 图像分割的主要任务是将图像划分为若干个______。
{答案:区域或像素块,具有相似的特征}5. 在深度学习框架TensorFlow中,创建一个全连接层可以使用______。
{答案:yers.dense}三、简答题(每题10分,共计30分)1. 请简要描述卷积神经网络(CNN)的工作原理及主要优点。
{答案:卷积神经网络是一种特殊的神经网络,它通过卷积层、池化层和全连接层进行特征提取和分类。
主要优点包括参数共享、局部感知、层次化特征提取等。
}2. 请简要介绍目标检测的主要任务、方法和挑战。
{答案:目标检测的主要任务是在图像中定位和识别物体。
2023计算机视觉与OpenCV复习题集附答案2023计算机视觉与OpenCV复习题集附答案计算机视觉与OpenCV是信息技术领域中一门重要的学科,涉及到图像的处理、分析和识别等方面。
在2023年的学习过程中,我们必须要进行深入的复习和巩固,以便掌握相关知识和技能。
本篇文章将为您提供一套包含答案的计算机视觉与OpenCV复习题集,希望对您的学习有所帮助。
一、选择题1. 下列哪项不属于计算机视觉的应用领域?A. 目标检测B. 图像生成C. 机器学习D. 语音识别答案:D2. OpenCV是一种开源的计算机视觉库,以下哪项不属于OpenCV 的主要功能?A. 图像处理B. 视频分析C. 人脸识别D. 语音合成答案:D3. 在OpenCV中,以下哪个函数用于图像的灰度化处理?A. cvtColor()B. threshold()C. Canny()D. warpPerspective()答案:A4. 以下哪个算法常用于目标检测任务?A. SIFTB. K-meansC. AdaBoostD. KNN答案:C5. 在计算机视觉中,以下哪项是用于图像特征提取的技术?A. 边缘检测B. 图像分割D. 图像滤波答案:A二、填空题1. 在OpenCV中,图像的像素值范围通常是______到______。
答案:0,2552. 计算机视觉中常用的图像特征描述符有______和______。
答案:SIFT,SURF3. 在OpenCV中,以下函数用于图像的模糊处理是______。
答案:blur()4. 在目标检测任务中,常用的评价指标是______和______。
答案:准确率,召回率5. 在图像分割中,以下算法常用于分水岭算法的实现是______。
答案:分水岭变换三、综合题1. 请用OpenCV实现图像的平滑处理,并附上代码。
```pythonimport cv2image = cv2.imread('image.jpg')# 图像平滑处理smooth_image = cv2.blur(image, (5, 5))# 显示处理结果cv2.imshow('Smooth Image', smooth_image)cv2.waitKey(0)cv2.destroyAllWindows()```2. 请简要说明SIFT算法在计算机视觉中的应用及其原理。
《计算机视觉》复习题1、利用MFC及OpenCV 库函数编写对话框程序,添加按钮实现图像读入、图像阈值分割、边缘提取等功能(至少实现三个以上功能)。
(考前做好并用A4纸打印,考试当天带来)为旋转不变算子,即当图像()v,u f旋转后,计算值在对应点保持不变。
2、证明Laplace算子理论3、计算机视觉研究的目的是什么?它和图像处理及计算机图形学的区别和联系是什么?从20世纪50年代末开始,计算机开始被作为实现人类智能和人类感知的工具,借助计算机人类第一次可以象借助机械实现对体力的延伸一样实现对脑力和感知能力的延伸。
对人类视觉感知能力的计算机模拟导致了计算机视觉的产生。
计算机视觉就是用各种成像系统代替视觉器官作为输入敏感手段,由计算机来替代大脑完成处理和解释。
计算机视觉使用的理论方法主要是基于几何、概率和运动学计算与三维重构的视觉计算理论。
具体地讲,计算机视觉要达到的基本目的有以下几个:根据一幅或者多幅二维图像计算出观测点到目标物体的距离;根据一幅或者多幅二维图像计算出观测点到目标物体的运动参数;根据一幅或者多幅二维图像计算出观测点到目标物体的表面物理特征;根据多幅二维投影图像恢复出更大空间区域的投影图像。
简单来说,计算机视觉要达到的最终目的是实现利用计算机对三维景物世界的理解,即实现人的视觉系统的某些功能。
从本质上来讲,计算机视觉研究就是利用二维投影图像来重构三维物体的可视部分。
计算机视觉和图像处理及计算机图形学的区别和联系:区别:图像处理(image processing)通常是把一幅图像变换为另外一幅图像。
它输入的是图像,输出的也是图像。
Photoshop中对一幅图像应用滤镜就是典型的一种图像处理。
常见操作有模糊、灰度化、增强对比度。
计算机图形学(Computer Graphics)是借助计算机来研究图形表达、处理图像、显示生成的学科。
,主要通过几何基元,如线、圆和自由曲面等,来生成图像,属于图像综合。
可编辑修改精选全文完整版计算机视觉考试试题及答案一、选择题1. 下列哪个不是计算机视觉的应用领域?A. 人脸识别B. 增强现实C. 虚拟现实D. 股票交易答案:D2. 计算机视觉是指计算机模拟人类的视觉系统进行图像处理和分析的技术。
A. 正确B. 错误答案:A3. 以下哪个不是计算机视觉主要研究的内容?A. 图像处理B. 物体识别C. 机器学习D. 运动跟踪答案:C4. 下列哪个不是计算机视觉处理图像时常用的方法?A. 边缘检测B. 目标跟踪C. 直方图均衡化D. 推理机制答案:D5. 下列哪个不是计算机视觉中常用的特征描述方法?A. 尺度不变特征变换(SIFT)B. 高斯金字塔C. 主成分分析(PCA)D. 平均池化答案:D二、填空题1. 计算机视觉与人工智能、机器学习和模式识别等领域有着密切的______。
答案:关联2. 机器学习在计算机视觉中的应用非常广泛,常用的算法包括支持向量机、______网络和决策树等。
答案:神经3. 图像边缘是指像素灰度发生突变的______。
答案:位置4. 目标跟踪是计算机视觉中的一个重要研究方向,常见的目标跟踪方法包括模板匹配、______跟踪和粒子滤波等。
答案:卡尔曼三、简答题1. 请简要解释计算机视觉中的图像处理是指什么?答:图像处理是计算机视觉中的一个基础部分,它用于对图像进行增强、滤波、几何变换等操作,以提取图像中的有用信息或改善图像的质量。
常见的图像处理方法包括边缘检测、图像平滑、直方图均衡化等。
2. 请简要描述一种常用的目标检测方法。
答:一种常用的目标检测方法是基于深度学习的卷积神经网络(CNN)。
该方法通过训练神经网络,使其能够自动学习目标的特征,并用于检测图像中是否存在目标。
通常,CNN首先通过卷积层提取图像的特征,然后通过池化层降低特征的维度,最后使用全连接层输出目标的概率或位置。
通过大量的训练样本和迭代训练,CNN可以达到较高的目标检测准确率。
计算机视觉考试题目及参考答案一、选择题(每题2分,共30分)1. 计算机视觉主要研究的是:A. 计算机图像处理B. 计算机图形学C. 计算机视觉系统D. 计算机视觉算法答案:C2. 图像处理与计算机视觉的区别在于:A. 图像处理注重图像的获取和传输,计算机视觉注重图像的解释和理解B. 图像处理主要用于网络传输,计算机视觉主要用于图像处理C. 图像处理是计算机视觉的一个子领域D. 图像处理与计算机视觉没有区别答案:A3. 计算机视觉应用广泛,以下哪项不是计算机视觉的应用之一:A. 人脸识别B. 视频监控C. 自动驾驶D. 家电控制答案:D4. 图像分割是计算机视觉中的重要任务,以下哪种方法常用于图像分割:A. 模糊聚类B. 边缘检测C. 直方图均衡化D. 滤波处理答案:B5. 特征提取是计算机视觉中的关键步骤,以下哪种方法常用于特征提取:A. 主成分分析(PCA)B. 高斯模糊C. 轮廓检测D. 图像压缩答案:A二、填空题(每题3分,共30分)1. 图像的分辨率指的是图像中包含的______。
答案:像素点2. 图像的边缘可以通过______算法来检测。
答案:Canny3. 图像配准是指将多幅图像在______方面进行对齐。
答案:空间4. 在计算机视觉中,用于描述图像颜色的模型有RGB和______。
答案:HSV5. OCR是计算机视觉中的一项重要任务,其全称为______。
答案:Optical Character Recognition三、简答题(每题10分,共30分)1. 请简要介绍计算机视觉的基本原理和流程。
答案:计算机视觉的基本原理是通过图像获取、图像处理和图像解释三个步骤来实现对图像的理解和应用。
图像获取是指通过摄像机等设备获取图像数据;图像处理是指对图像进行预处理,包括去噪、增强、分割等操作;图像解释是指通过特征提取、目标检测和识别等算法对图像进行分析和解释。
2. 请简要介绍计算机视觉在人脸识别中的应用及原理。
计算机视觉笔试试题一、选择题1. 计算机视觉是利用计算机对图像、视频等视觉信息进行分析和处理的一门学科。
以下哪项不属于计算机视觉的应用领域?A. 人脸识别B. 遥感图像分析C. 智能车辆导航D. 机器学习算法答案:D2. 在计算机视觉中,图像分类是指将输入的图像分到预先定义的类别中。
以下哪项不属于常见的图像分类方法?A. 支持向量机(SVM)B. 卷积神经网络(CNN)C. 高斯混合模型(GMM)D. 循环神经网络(RNN)答案:D3. 目标检测是计算机视觉中的关键任务之一,其目标是在图像或视频中准确地找出目标的位置和类别。
以下哪个是常用的目标检测算法?A. 基于颜色空间的图像分割B. 基于特征点的匹配算法C. 卷积神经网络(CNN)D. 基于相似度的模板匹配答案:C4. 图像分割是计算机视觉中的基础问题,其目标是将图像分成若干个具有语义意义的区域。
以下哪项不属于图像分割的常用方法?A. 边缘检测B. 区域生长C. K均值聚类D. 图像去噪答案:D5. 三维重建是计算机视觉中的重要研究方向,其目标是通过图像或视频等二维输入重建出对应的三维场景。
以下哪个是常用的三维重建方法?A. 模板匹配B. 直方图均衡化C. 结构光扫描D. 高斯金字塔答案:C二、填空题1. 在图像处理中,是指通过一系列像素操作来改变图像的外观或信息。
答案:图像增强2. 在计算机视觉中,特征提取是指从输入的图像或视频中提取出的信息。
答案:有用或有区别的特征3. 计算机视觉中常用的评价标准之一是,它可以衡量目标检测算法的准确率和召回率。
答案:精确度(precision)4. 在目标跟踪中,是指通过预测目标的位置来跟踪目标。
答案:滤波器三、简答题1. 简要介绍计算机视觉中的图像分类任务,并说明其应用。
答案:图像分类是计算机视觉中的一个基本任务,其目标是将输入的图像分到预先定义的类别中。
图像分类可以应用于多个领域,如人脸识别、图像搜索、医学图像分析等。
《计算机视觉》复习题
1、利用MFC及OpenCV 库函数编写对话框程序,添加按钮实现图像读入、图像阈值分割、边缘提取等功能(至少实现三个以上功能)。
(考前做好并用A4纸打印,考试当天带来)
为旋转不变算子,即当图像()v,u f旋转后,计算值在对应点保持不变。
2、证明Laplace算子
理论
3、计算机视觉研究的目的是什么?它和图像处理及计算机图形学的区别和联系是什么?
从20世纪50年代末开始,计算机开始被作为实现人类智能和人类感知的工具,借助计算机人类第一次可以象借助机械实现对体力的延伸一样实现对脑力和感知能力的延伸。
对人类视觉感知能力的计算机模拟导致了计算机视觉的产生。
计算机视觉就是用各种成像系统代替视觉器官作为输入敏感手段,由计算机来替代大脑完成处理和解释。
计算机视觉使用的理论方法主要是基于几何、概率和运动学计算与三维重构的视觉计算理论。
具体地讲,计算机视觉要达到的基本目的有以下几个:
根据一幅或者多幅二维图像计算出观测点到目标物体的距离;
根据一幅或者多幅二维图像计算出观测点到目标物体的运动参数;
根据一幅或者多幅二维图像计算出观测点到目标物体的表面物理特征;
根据多幅二维投影图像恢复出更大空间区域的投影图像。
简单来说,计算机视觉要达到的最终目的是实现利用计算机对三维景物世界的理解,即实现人的视觉系统的某些功能。
从本质上来讲,计算机视觉研究就是利用二维投影图像来重构三维物体的可视部分。
计算机视觉和图像处理及计算机图形学的区别和联系:
区别:
图像处理(image processing)通常是把一幅图像变换为另外一幅图像。
它输入的是图像,输出的也是图像。
Photoshop中对一幅图像应用滤镜就是典型的一种图像处理。
常见操作有模糊、灰度化、增强对比度。
计算机图形学(Computer Graphics)是借助计算机来研究图形表达、处理图像、显示生成的学科。
,主要通过几何基元,如线、圆和自由曲面等,来生成图像,属于图像综合。
输入的是对虚拟场景的描述,通常为多边形数组,输出的是图像,即二维像素数组。
计算机视觉(Computer Vision )利用二维投影图像来重构三维物体的可视部分。
输入的是图像或者图像序列,通常来自计算机或者USB 摄像头,输出的是对于图像序列对应的真实世界的理解,比如检测人脸、识别车牌等。
图像处理:人是最终的解释者;计算机视觉:计算机是图像的解释着。
联系:
计算机视觉系统需要图像处理模块,比如利用图像处理技术进行预处理和特征抽取,因此图像处理在计算机视觉早期阶段起着很大的作用。
计算机视觉是从图像中估计几何基元和其他的特征,属于图像分析,与属于图像综合的计算机图形学正好是解决相反的问题的。
但是可视化和虚拟现实把两个领域紧密联系在一起。
增强现实需要这三个技术紧密结合,它用图像处理进行预处理,用计算机视觉进行跟踪物体的识别与姿态获取,用计算机图形学进行虚拟三
维物体的叠加。
4、已知四对对应点()T
i i i ,v ,u 1=x 和()),,i (,Y ,X T
i i i 411 ==X 分别为图像平面上特征点的齐次坐标以及对
应于图像特征点的空间平面上点的齐次坐标,s 为未知非零尺度因子。
试根据这四对对应点i
i x X ↔推导
出单应矩阵H 的计算公式,写出详细推导过程。
5、详细推导出线性摄像机模型标定方法Direct Linear Transfromation(DLT)的计算公式。
6、空间两条平行线的图像一般不平行,它们的交点称为消失点(vanishing point ),试证明消失点和摄像机光心的连线与空间平行线平行。
7、照相机的成像过程是一个从3维空间到2维空间退化的射影变换,试推导出一个空间三维点到一个图像平面点的射影变换公式。
8、已知两幅图像间一组对应点()()()N ,,i ,v ,u ,v ,u T
i i i T
i i i 2111=''='↔=x x 和它们的摄像机投影矩阵P 和
P ',试推导出它们对应的三维空间点计算公式。
9、请详细描述Marr 计算视觉理论的三个层次。
• Marr 从信息处理系统的角度出发,认为视觉系统的研究应分为三个层次,即计算理论层次、表达
(representation)与算法层次、硬件实现层次.
• 计算理论层次要回答系统各部分的计算目的与计算策略,亦即各部分的输入输出是什么,之间的关
系是什么变换或什么约束.
• 表达与算法层次应给出各部分(或称各模块)的输入输出和内部的信息表达,以及实现计算理论所
规定的目标的算法.
• 硬件实现层次要回答“如何用硬件实现以上算法”.
10、试推导出张正友平面标定算法的计算公式。
其中,A 为摄像机的内参数矩阵,T M
[X Y 1]=为模板平面上点的齐次坐标, T m [u v 1]=
为模板平面上点投影到图象平面上对应点的齐次坐标, 123[r r r ]和t 分别是摄像机坐标系相对于世界坐
标系的旋转矩阵和平移向量则上式可变换为:
其中
,系数。
根据旋转矩阵的性质,即 T 12r r 0=和 12r r 1==,每幅图象可以获得以下两个对内参数矩阵的基本
内参数约束关系式:
11、请详细描述Harris 角点检测方法的基本数学模型、算法实施流程以及其检测出角点的性质
Harris 算子的数学描述如下:
[]2
,(,)(,)(,)(,)x y
E u v w x y I x u y v I x y =++-∑
(,)I x u y v ++表示密度变化后的灰度值,(,)I x y 表示密度变化之前的灰度值,(,)w x y 表示窗口函数。
窗
口函数(,)w x y 可用来过滤噪声,保留最显著的图像特征,它的选择有多重,可以选用均值滤波函数或者高斯滤波函数。
(,)E u v 的泰勒展开式可表示为:
[](,),u E u v u v M v ⎡⎤
≅⎢⎥⎣⎦
其中M 是 2⨯2 矩阵,可由图像的导数求得:
2
2,(,)x x y x y x y y I I I M w x y I I I ⎡⎤
=⎢
⎥⎢⎥⎣⎦
∑ 其中Ix,Iy 分别为像素沿x ,y 的导数。
()2
=-
det trace
R M k M
•R只与M的特征值有关
•角点:R为大数值正数
•边缘:R为大数值负数
•平坦区:R为小数值
算法:
–对角点响应函数R进行阈值处理:
R > threshold
–提取R的局部极大值
检测出角点的性质
旋转不变性:Harris算子是各向同性的"因此当图像发生旋转时,角点的检测不会受到影响。
角点响应函数R 对于图像的旋转具有不变性
对于图像灰度的仿射变化具有部分的不变性:当光照强度的变化的方式有如下两种方式时,harris算子具有光强变化稳定性
•对于图像几何尺度变化不具有不变性:随尺度变化,Harris角点检测的性能下降. Harris算子易受到图像尺度变化的影响"当图像出现缩放时,原图像中的角点在变化后的图像中可能无法被检测到;同样,当图像尺度变化时,原图像中的角点在变化后的图像中并非角点"这是由固定大小的Harris角点检测窗口所决定的"
12、请详细描述分层重建理论及其相应的三维重建算法。