矩阵论 矩阵的分解
- 格式:ppt
- 大小:590.00 KB
- 文档页数:15
矩阵论中的奇异值分解方法研究矩阵论是数学中的重要分支,研究矩阵的性质和特征。
奇异值分解(Singular Value Decomposition,简称SVD)是矩阵论中的一种重要方法,广泛应用于线性代数、信号处理、图像处理等领域。
本文将对奇异值分解方法进行深入研究和讨论。
一、奇异值分解的基本原理在介绍奇异值分解之前,我们首先需要了解特征值分解(Eigenvalue Decomposition)的基本概念。
特征值分解是将一个矩阵分解为特征向量和特征值的形式,用于寻找矩阵的主要特征。
奇异值分解是特征值分解的推广,适用于非方阵以及具有零特征值的方阵。
对于任意一个矩阵A,可以将其分解为以下形式:A = UΣV^T其中,U和V是正交矩阵,Σ是一个对角矩阵。
U的列向量称为左奇异向量,V的列向量称为右奇异向量,Σ对角线上的元素称为奇异值。
奇异值的大小表示了矩阵A在相应方向上的重要性,越大的奇异值表示了越重要的特征。
二、奇异值分解的应用领域奇异值分解方法在多个领域中被广泛应用。
以下是几个典型的应用领域:1. 线性代数奇异值分解在线性代数中有着广泛的应用,特别是在最小二乘问题的求解中。
通过对矩阵进行奇异值分解,可以得到一个最优的近似解,从而解决线性方程组的问题。
2. 信号处理在信号处理中,奇异值分解被用于降噪和信号压缩。
通过分解并选取奇异值较大的部分,可以过滤噪声并减少数据维度,从而提高信号质量和处理效率。
3. 图像处理奇异值分解在图像处理领域中也有广泛的应用。
通过对图像矩阵进行奇异值分解,可以实现图像压缩和去噪等处理,同时保留图像的主要特征。
三、奇异值分解的算法奇异值分解的计算过程一般可以通过各种数值计算方法来实现。
常见的奇异值分解算法包括Jacobi迭代法、幂迭代法和Golub-Kahan迭代法等。
其中,Golub-Kahan迭代法是一种效率较高的算法。
该算法通过不断迭代,逐步逼近奇异值和奇异向量。
四、奇异值分解的优缺点奇异值分解作为一种重要的矩阵分解方法,具有以下优点:1. 稳定性奇异值分解对于数据的扰动具有较好的稳定性。
矩阵论是数学领域中的一个重要分支,它研究的是矩阵和线性方程组的理论和方法。
在矩阵论中,三角分解是一种常见的矩阵分解方法,它可以将一个复杂的矩阵分解为一个或多个简单的三角形矩阵的乘积。
不同形式的三角分解有着各自的优缺点,本文将从几种不同的角度来讨论这些优缺点。
一、LU分解LU分解是将一个矩阵分解为一个下三角矩阵L和一个上三角矩阵U的乘积,即A=LU。
LU分解的优点是计算简单,因为它只需要进行一次分解即可得到L和U两个矩阵,后续的线性方程求解可以直接使用LU 分解后的矩阵进行计算。
然而,LU分解的缺点是当原始矩阵A的某些主对角线元素接近于零时,LU分解可能会失效,需要采取一些特殊的技巧来解决这个问题。
二、Cholesky分解Cholesky分解是将一个对称正定矩阵分解为一个下三角矩阵L和其转置矩阵的乘积,即A=LL^T。
Cholesky分解的优点是计算量较小,而且分解出的L矩阵的元素都是实数,因此在存储和计算上都有一定的优势。
然而,Cholesky分解的缺点是它只适用于对称正定矩阵,对于非对称矩阵或不正定矩阵是无法进行Cholesky分解的。
三、QR分解QR分解是将一个矩阵分解为一个正交矩阵Q和一个上三角矩阵R的乘积,即A=QR。
QR分解的优点是适用范围广,对于任意矩阵都可以进行QR分解,并且分解出的Q和R矩阵都具有一些良好的性质,比如Q是正交矩阵,R是上三角矩阵。
然而,QR分解的缺点是计算量较大,尤其是对于大型矩阵来说,QR分解的计算时间会比较长。
不同形式的三角分解都有各自的优缺点,选择合适的分解方法需要根据具体的问题来决定。
在实际应用中,可以根据矩阵的特点和计算需求来选择最合适的三角分解方法,以达到最优的计算效果。
研究和探索更加高效的矩阵分解方法也是矩阵论研究的重要方向之一。
四、SVD分解SVD分解是将一个矩阵分解为三个矩阵的乘积,即A=UΣV^T,其中U和V分别是正交矩阵,Σ是对角矩阵。
SVD分解的优点是适用于所有的矩阵,无论是否为方阵,而且SVD分解是唯一的,即对于每一个矩阵都存在唯一的SVD分解。

矩阵分解总结-回复矩阵分解总结:1. 什么是矩阵分解矩阵分解是将一个矩阵拆解成若干个子矩阵的过程。
通过分解矩阵,我们可以更好地理解矩阵的性质和结构,从而简化矩阵的计算和应用过程。
常见的矩阵分解方法包括LU分解、QR分解、奇异值分解(SVD)和特征值分解等。
2. LU分解LU分解是将一个矩阵分解为下三角矩阵L和上三角矩阵U的乘积的过程。
LU分解的主要应用是求解线性方程组和矩阵的逆。
通过LU分解,我们可以将线性方程组的求解过程简化为两个方程组的求解,从而提高计算效率。
3. QR分解QR分解是将一个矩阵分解为正交矩阵Q和上三角矩阵R的乘积的过程。
QR分解的主要应用是求解最小二乘问题和计算矩阵的特征值。
通过QR分解,我们可以将最小二乘问题转化为最小化上三角矩阵R的问题,从而简化求解过程。
4. 奇异值分解(SVD)奇异值分解是将一个矩阵分解为三个矩阵的乘积的过程,即将矩阵A分解为U、Σ和V的乘积。
其中,U和V是正交矩阵,Σ是一个对角矩阵。
SVD 的主要应用是降维和推荐系统。
通过SVD,我们可以将高维矩阵降低到低维空间,从而简化计算和提高推荐系统的准确性。
5. 特征值分解特征值分解是将一个方阵分解为特征向量和特征值的乘积的过程。
特征值分解的主要应用是计算矩阵的幂和对角化。
通过特征值分解,我们可以将矩阵的幂运算简化为特征值的幂运算,从而提高计算效率和准确性。
总结:矩阵分解是一种将矩阵拆解为更简单结构的方法,可以简化矩阵的计算和应用过程。
不同的矩阵分解方法适用于不同的应用场景,如LU分解适用于线性方程组的求解,QR分解适用于最小二乘问题的求解,SVD适用于降维和推荐系统,特征值分解适用于幂运算和对角化。
矩阵分解在数学、工程、计算机科学等领域有着广泛的应用,对于提高计算效率和准确性起到了重要的作用。
矩阵论知识要点范文矩阵论(Matrix theory)是线性代数的一门重要分支,研究的是矩阵的性质、运算以及与线性方程组、线性变换等数学对象之间的关系。
矩阵论在多个领域中都有广泛的应用,如物理学、工程学、计算机科学等。
以下是一些矩阵论的重要知识要点:1.矩阵表示:矩阵由行、列组成,可以表示为一个矩形的数表。
矩阵的大小由行数和列数确定,常用的表示方法是用大写字母表示矩阵,如A、B、C等。
2.矩阵运算:矩阵可以进行加法和乘法运算。
矩阵的加法是对应元素相加,矩阵的乘法是按照一定规则进行计算得到一个新的矩阵。
3.矩阵的转置:矩阵的转置是将矩阵按照主对角线进行镜像变换得到的新矩阵。
对于一个m×n的矩阵,转置后得到一个n×m的矩阵。
4.矩阵的逆:对于一个可逆矩阵A,存在一个矩阵B,满足AB=BA=I,其中I为单位矩阵。
矩阵B称为矩阵A的逆矩阵,记作A^(-1)。
逆矩阵的存在与唯一性为解线性方程组提供了便利。
5.矩阵的秩:矩阵的秩是指矩阵中线性无关的行或列的最大个数。
秩是矩阵的一个重要性质,与矩阵的解空间、零空间等直接相关。
6.矩阵的特征值和特征向量:对于一个n阶矩阵A,如果存在一个非零向量x使得Ax=λx,其中λ为一个常数,则称常数λ为矩阵A的特征值,非零向量x称为对应于特征值λ的特征向量。
矩阵的特征值和特征向量可以用来描述线性变换的性质。
7.矩阵的相似性:如果存在一个可逆矩阵P,使得P^(-1)AP=B,则矩阵B与A相似。
相似矩阵具有一些相似的性质,如秩、迹、特征值等。
8.矩阵分解:矩阵分解是将一个复杂的矩阵表示分解为一些简单矩阵的乘积或和的形式,常见的分解方法有LU分解、QR分解、特征值分解等。
9. 矩阵的迹:矩阵的迹是主对角线上各个元素的和,记作tr(A)。
矩阵的迹与矩阵的特征值、秩等有一定的关系。
10.矩阵方程:矩阵方程是形如AX=B的方程,其中A、B为已知矩阵,X为未知矩阵。
矩阵方程的研究可以帮助解决线性方程组、线性变换等相关问题。

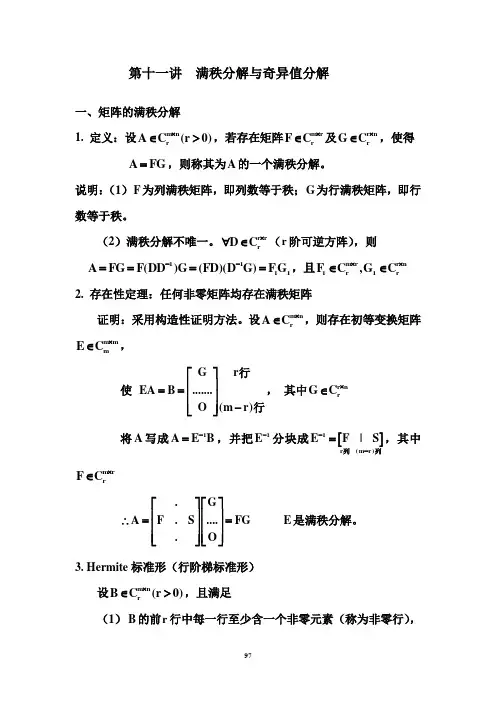
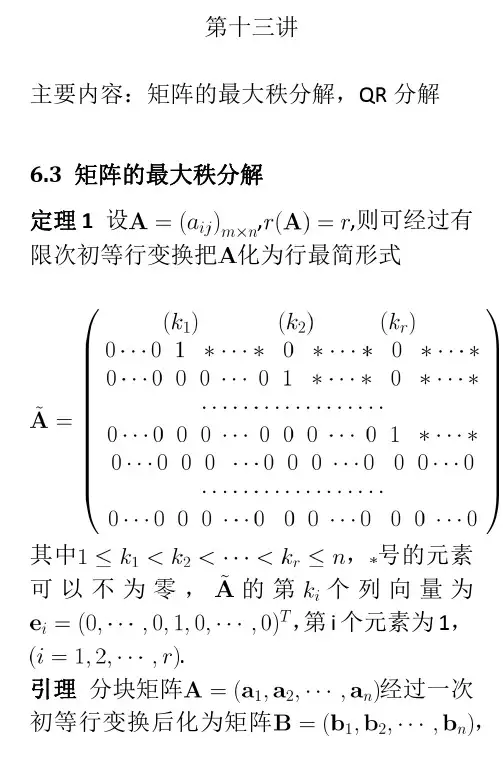
第十一讲 满秩分解与奇异值分解一、矩阵的满秩分解1. 定义:设m n r A C (r 0)⨯∈>,若存在矩阵m r r F C ⨯∈及r nrG C ⨯∈,使得 A FG =,则称其为A 的一个满秩分解。
说明:(1)F 为列满秩矩阵,即列数等于秩;G 为行满秩矩阵,即行数等于秩。
(2)满秩分解不唯一。
r rrD C ⨯∀∈(r 阶可逆方阵),则 1111A FG F(DD )G (FD)(D G)F G --====,且m r r n1r 1rF C ,G C ⨯⨯∈∈ 2. 存在性定理:任何非零矩阵均存在满秩矩阵证明:采用构造性证明方法。
设m nr A C ⨯∈,则存在初等变换矩阵m mmE C ⨯∈, 使 G r EA B .......O (m r)⎡⎤⎢⎥==⎢⎥-⎢⎥⎣⎦行行, 其中r nr G C ⨯∈ 将A 写成1A E B -=,并把1E -分块成[]1r (m r)E F |S --=列列,其中m rrF C ⨯∈ .G A F .S ....FG .O ⎡⎤⎡⎤⎢⎥⎢⎥∴==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦E 是满秩分解。
3. Hermite 标准形(行阶梯标准形)设m nr B C (r 0)⨯∈>,且满足(1) B 的前r 行中每一行至少含一个非零元素(称为非零行),且第一个非零元素为1,而后(m r)-行的元素全为零(称为零行);(2) 若B 中第i 行的第一个非零元素(即1)在第i j 列(i 1,2,...,r)=,则 12r j j ...j <<<;(3) 矩阵B 的第1j 列,第2j 列,…,第r j 列合起来恰为m 阶单位方阵m I 的前r 列(即12r j ,j ,...,j 列上除了前述的1外全为0)则称B 为Hermite 标准形。
例1 561356120013001022B C 000111000000000000⨯⨯-⎡⎤⎢⎥⎢⎥=∈-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦ 为Hermite 标准形452245010200013B C 0000000000⨯⨯⎡⎤⎢⎥⎢⎥=∈⎢⎥⎢⎥⎣⎦ 也是Hermite 标准形4. 满秩分解的一种求法设m nr A C ⨯∈,(1) 采用行初等变换将A 化成Hermite 标准形,其矩阵形式为EA B =,其中B 为Hermite 标准形定义中给出的形状;(2) 选取置换矩阵1 P 的第i 列为i j e ,即该列向量除第i j 个元素为1外,其余元素全为零(i 1,2,...,r)=,其中i j 为Hermite 标准形中每行第一个非零元素(即1)所在的列数;2 其它(n r)-列只需确保P 为置换矩阵即可(P 的每一行,每一列均只有一个非零元素,且为1);3 用P 右乘任何矩阵(可乘性得到满足时),即可得该矩阵的第i j 列置换到新矩阵(即乘积矩阵)的第i 列 4 令[]1r (n r)P P |*-=列列,即12r n r1j j j rn rP e e ...e C ⨯⨯⎡⎤=∈⎣⎦(3)令G B =的前r 行r n n C ⨯∈,m r1rF AP C ⨯=∈则A FG = 证明:G EA B O ⎡⎤==⎢⎥⎣⎦,[]1G A E B F |S FG O -⎡⎤===⎢⎥⎣⎦则m r r F C ⨯∈,r nrG C ⨯∈,G 已知,但F ?=,当然可以通过求出1E,E -再将1E -分块得到,但这样G 就没必要采用Hermite 标准形形式,注意到r 1I BP O ⎡⎤=⎢⎥⎣⎦,则[]1r 11I AP E BP F |S F O -⎡⎤===⎢⎥⎣⎦证毕例1 1230A 02111021⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦求其满秩分解解:(1)首先求出A 的秩。

短暂又充实的学习时光结束了,这学期我学习了《高等工程数学》这门课程,这门课程是一门研究生重要的数学基础课,涵盖了矩阵论、数值分析、数理统计等内容。
要求以掌握和应用高等工程数学问题的数学方法为主导,使工学硕士研究生掌握一定的数学理论基础知识,能为今后的进一步学习和解决生活、工作中遇到的实际工程数学问题打下坚实的基础。
通过学习这门课程,我的学习总结与体会如下:1.矩阵论。
一个方阵化为对角形的条件十分苛刻,对于n阶矩阵A,其可对角化的充要条件是有n个线性无关特征向量。
具体来说,就是要求A有n个互异的特征值。
显然不是每一个矩阵都可以化为对角形,但是在实数范围内,任意矩阵却可以化为一个分块对角形,而这个分块对角形就是所谓的Jordan标准型。
矩阵化Jordan型的方法总结如下:对λ矩阵经过一系列三类初等行(列)变换,先观察矩阵的特点,使得左上角的元素次数逐渐降低,最终降低到可以整除矩阵内的其他所有元素。
然后得到λ矩阵的不变因子,求出Smith标准型,再求出初等因子,最后通过定义组合出Jordan型矩阵。
这个地方我在计算的时候,老是化出来的矩阵不对,我的错误主要在于:三类初等变换的运用。
在第二类初等变换中所乘的项必须为非0常数,且不可使用多项式。
在第三类初等变换中只能使用多项式,不能使用分式。
在经过大量题目的训练后,我再也不会犯这种概念不清的错误了,解题正确率也上去了。
由此可见,理解数学概念十分重要。
2.误差分析。
在很多情况下,对于实际问题的描述,我们往往得不到最为精确的函数表达,我们只有通过对所描述的问题进行抽象、简化,得到它的近似模型,通过近似模型来反应真实的函数关系。
在这个过程中,就会产生误差,而由误差带来的影响,有时会很严重。
运用计算机进行数值计算的时候,需要注意以下几个原则:1.避免两相近的数相减。
2.避免大数“吃”小数的现象。
3.避免接近零的数做除数。
4.注意计算步骤的简化,减小运算次数。
其中1、3条准则在实际应用时十分重要。
矩阵分解公式摘要:一、矩阵分解公式简介1.矩阵分解的定义2.矩阵分解的意义二、矩阵分解的几种方法1.奇异值分解(SVD)2.谱分解(eigenvalue decomposition)3.非负矩阵分解(NMF)三、矩阵分解在实际应用中的案例1.图像处理2.信号处理3.数据降维四、矩阵分解的发展趋势和挑战1.高维数据的处理2.矩阵分解算法的优化3.新型矩阵分解方法的研究正文:矩阵分解公式是线性代数中一个重要的概念,它涉及到矩阵的诸多操作,如矩阵的乘法、求逆、迹等。
矩阵分解的意义在于将一个复杂的矩阵简化为易于处理的形式,从而便于进行矩阵运算和数据分析。
本文将介绍几种常见的矩阵分解方法,并探讨它们在实际应用中的案例和发展趋势。
首先,我们来了解一下矩阵分解的定义。
设A是一个m×n的矩阵,矩阵分解就是将A表示为若干个矩阵的乘积,即A = UΣV*,其中U是m×m的酉矩阵(满足UU* = I),Σ是m×n的非负实对角矩阵,对角线上的元素称为奇异值,V是n×n的酉矩阵(满足VV* = I),V*是V的共轭转置。
通过矩阵分解,我们可以得到矩阵A的秩、奇异值、特征值等信息。
矩阵分解有多种方法,其中较为常见的有奇异值分解(SVD)、谱分解(eigenvalue decomposition)和非负矩阵分解(NMF)。
奇异值分解是将矩阵A分解为三个矩阵的乘积:UΣV*,其中U和V是酉矩阵,Σ是对角矩阵。
谱分解是将矩阵A分解为两个矩阵的乘积:A = UΣV*,其中U和V是酉矩阵,Σ是对角矩阵,对角线上的元素是矩阵A的特征值。
非负矩阵分解是将矩阵A分解为两个非负矩阵的乘积:A = WH,其中W和H都是非负矩阵。
矩阵分解在实际应用中有着广泛的应用,尤其在图像处理、信号处理和数据降维等领域。
在图像处理中,矩阵分解可以用于图像压缩、去噪和特征提取等任务。
在信号处理中,矩阵分解可以用于信号降噪、特征提取和频谱分析等任务。
资料内容仅供您学习参考,如有不当或者侵权,请联系改正或者删除。
哈尔滨工程大学研究生试卷( 年 秋 季学期)课程编号: 30003 课程名称: 矩阵论 一.填空( 每题3分, 共45分)1.已知3R 中的两组基: [][][]T T T 221,010,101321===ααα[][][]T T T 111,011,001321===βββ, 则由基321,,ααα到基321,,βββ的过渡矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--011132122。
2.设, n R W ⊂} 0 ),,,{(2121=+++=n T n x x x x x x W , 则=W dim n-1 。
3.线性变换T 在基()()()1,1,0,1,0,1,1,1,1321=-=-=ηηη下的矩阵A =⎪⎪⎪⎭⎫⎝⎛-121011101,则T 在基()()()1,0,0,0,1,0,0,0,1321===εεε下的矩阵为⎪⎪⎪⎭⎫⎝⎛--2030222114.设3333{}T S A RA A R⨯⨯=∈=-⊂, 则S 的一组基底为:⎪⎪⎪⎭⎫⎝⎛-⎪⎪⎪⎭⎫ ⎝⎛-⎪⎪⎪⎭⎫ ⎝⎛-010100000 , 001000100 , 000001010。
5.设V 为数域P 上的n 维线性空间, 且),,,(21n L V ααα =, 若V ∈α在基},,,{21n ααα 下的坐标为)1,2,,1,( -n n ,则α在基},,,{21211n αααααα++++ 下的坐标为 T)1,1,1( 。
6.设3][x P 是内积空间, 3][)(),(x P x g x f ∈∀, 定义内积⎰=2)()())(),((dxx g x f x g x f 则内积在基 2)1( , 1,1--x x 下的矩阵为⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=320320323202A7.由向量T )1,2,1(1=α与T )2,1,1(2-=α生成的3R 的子空间),(21ααspan V =的正交补=⊥V )}3,1,5{(-span8.设122212221A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦, 1-=λ为A 的一个特征值, 则λ的几何重复度=λa 2 。
矩阵论的概念与定理
矩阵论是线性代数的重要分支,研究矩阵的性质、运算和定理。
矩阵的概念:矩阵是由一组数排成的矩形阵列,通常用大写字母表示。
矩阵由行和列组成,行数和列数可以不相等。
例如,一个3行2列的矩阵表示为:
A = {{a11, a12},
{a21, a22},
{a31, a32}}
矩阵的运算:矩阵有加法、减法和乘法运算。
- 矩阵的加法:如果两个矩阵的行数和列数相等,它们可以相加。
相加时,对应位置上的元素相加得到结果矩阵。
- 矩阵的减法:与加法类似,对应位置上的元素相减得到结果
矩阵。
- 矩阵的乘法:如果一个矩阵的列数和另一个矩阵的行数相等,它们可以相乘。
矩阵乘法按照一定规则进行,结果矩阵的行数等于第一个矩阵的行数,列数等于第二个矩阵的列数。
矩阵的定理:矩阵论涉及许多重要的定理,以下列举几个常见的:
- 可逆矩阵定理:一个n阶矩阵是可逆的充分必要条件是它的
行列式不为零。
可逆矩阵有唯一的逆矩阵,其乘积为单位矩阵。
- 特征值和特征向量定理:一个n阶矩阵具有n个特征值和n
个线性无关的特征向量。
- 奇异值分解定理:任何一个矩阵都可以分解为三个矩阵的乘积,其中一个是正交矩阵,一个是对角矩阵,另一个是伴随对角矩阵。
- 矩阵的秩定理:一个矩阵的秩是它包含的非零行的最大数目,也是它包含的非零列的最大数目。
一个m×n的矩阵的秩至多
为min(m,n)。
以上只是矩阵论的一部分概念与定理,它们在数学、工程和科学等领域中都有广泛的应用。