现控实验指导书
- 格式:docx
- 大小:105.89 KB
- 文档页数:9

现代控制理论基于MATLAB的实验指导书第一部分实验要求1.实验前做好预习。
2.严格按照要求操作实验仪器,用毕恢复原状。
3.实验完成后,由指导教师检查实验记录、验收仪器后,方可离开。
4.实验报告应包括以下内容:1)实验目的;2)实验原理图;3)实验内容、步骤;4)仿真实验结果(保留仿真实验波形,读取关键参数);5)仿真实验结果分析。
第二部分MATLAB平台介绍实际生产过程中,大部分的系统是比较复杂的,并且要考虑安全性、经济性以及进行实验研究的可能性等,这在现场实验中往往不易做到,甚至根本不允许这样做。
这时,就需要把实际系统建立成物理模型或数学模型进行研究,然后把对模型实验研究的结果应用到实际系统中去,这种方法就叫做模拟仿真研究,简称仿真。
到目前为止,已形成了许多各具特色的仿真语言。
其中美国Mathworks软件公司的动态仿真集成软件Simulink与该公司著名的MATLAB软件集成在一起,成为当今最具影响力的控制系统应用软件。
国内MA TLAB软件的著名论坛为“MATLAB中文论坛”,网址为:https:///forum.php,建议同学们注册并参与论坛相关内容的讨论。
图1 MA TLAB仿真环境第三部分 实验实验一线性系统的时域分析实验目的熟悉MATLAB 环境,掌握用MATLAB 控制系统工具箱进行线性定常系统的时域分析、能控性与能观性分析、稳定性分析的方法。
实验要求完成指导书规定的实验内容,记录并分析实验结果,写出实验报告。
实验内容1.已知系统的状态模型,求系统在单位阶跃输入下的各状态变量、输出响应曲线。
例:[]⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡2121214493.69691.1,0107814.07814.05572.0x x y u x x x x 。
键入:a = [-0.5572, -0.7814; 0.7814,0]; b = [1; 0]; c = [1.9691,6.4493]; d = 0;[y, x, t]=step(a, b, c, d); plot(t, y); grid (回车,显示输出响应曲线。

⾃动控制原理实验指导书⽬录第⼀章⾃动控制原理实验 (1)实验⼀典型环节模拟⽅法及动态特性 (1)实验⼆典型⼆阶系统的动态特性 (4)实验三典型调节规律的模拟电路设计及动态特性测试 (6)实验四调节系统的稳态误差分析 (8)实验五三阶系统模拟电路设计及动态特性和稳定性分析 (11)实验六单回路系统中的PI调节器参数改变对系统稳定性影响 (13)实验七典型⾮线性环节的模拟⽅法 (15)实验⼋线性系统的相平⾯分析 (17)第⼆章控制理论实验箱及DS3042M(40M)⽰波器简介 (19)第⼀节⾃动控制理论实验箱的简介 (19)第⼆节数字存储⽰波器简介 (20)第⼀章⾃动控制原理实验实验⼀典型环节模拟⽅法及动态特性⼀、实验⽬的1、掌握⽐例、积分、实际微分及惯性环节的模拟⽅法。
2、通过实验熟悉各种典型环节的传递函数和动态特性。
⼆、实验设备及器材配置1、⾃动控制理论实验系统。
2、数字存储⽰波器。
3、数字万⽤表。
4、各种长度联接导线。
三、实验内容分别模拟⽐例环节、积分环节、实际微分环节、惯性环节,输⼊阶跃信号,观察变化情况。
1、⽐例环节实验模拟电路见图1-1所⽰传递函数:K R R V V I -=-=120阶跃输⼊信号:2V实验参数:(1) R 1=100K R 2=100K(2) R 1=100K R 2=200K2、积分环节实验模拟电路见图1-2所⽰传递函数:ST V V I I O 1-= ,其中T I阶跃输⼊信号:2V 实验参数:(1) R=100K C=1µf(2) R=100K C=2µf 3、实际微分环节实验模拟电路见图1-3所⽰传递函数:K ST S T V V D D I O +-=1 其中 T D =R 1C K=12R R 阶跃输⼊信号:2V实验参数:(1) R 1=100K R 2=100K (2)R 1=100K R 2=200K C=1µf4、惯性环节实验模拟电路见图1-4所⽰传递函数:1+-=TS K V V I O 其中 T=R 2C K=12R R 阶跃输⼊:2V 实验参数:(1) R 1=100K R 2=100K C=1µf(2) R=100K R 2=100K C=2µfR四、实验步骤1、熟悉实验设备并在实验设备上分别联接各种典型环节。

现代控制理论基础实验指导书实验一:控制系统模型转换一、实验目的1.掌握控制系统模型转换,并使用计算机仿真软件验证。
2.学习并会简单应用MATLAB软件。
二、实验器材[1] 微型计算机[2] MATLAB软件三、实验要求与任务1.设系统的零极点增益模型为,求系统的传递函数及状态空间模型。
解:在MATLAB软件中,新建m文件,输入以下程序后保存并运行。
%Example 1%k=6;z=[-3];p=[-1,-2,-5];[num,den]=zp2tf(z,p,k)[a,b,c,d]=zp2ss(z,p,k)其中:zp2tf函数——变零极点表示为传递函数表示zp2ss函数——变零极点表示为状态空间表示记录实验结果,并给出系统的传递函数及状态空间模型。
2.给定离散系统状态空间方程求其传递函数模型和零极点模型,并判断其稳定性。
解:在MATLAB软件中,新建m文件,输入以下程序后保存并运行。
%Example 2%a=[ 0 0 ; 0 0 0; ;0 0 0];b=[1;0;1;0];c=[0,0,0,1];d=[0];[num,den]=ss2tf(a,b,c,d)[z,p,k]=ss2zp(a,b,c,d)pzmap(p,z)title('Pole-zero Map')其中:ss2tf函数——变状态空间表示为传递函数表示ss2zp函数——变状态空间表示为零极点表示pzmap ——零极点图记录实验结果,并给出系统的传递函数模型和零极点模型;绘出图形,并判断系统稳定性。
3.已知系统的传递函数为,求系统的零极点增益模型及状态空间模型。
tf2zp函数——变系统传递函数形式为零极点增益形式tf2ss函数——变系统传递函数形式为状态空间表示形式编写程序,记录实验结果,并给出系统的状态空间模型和零极点模型。
4.已知系统状态空间表达式为ss2tf函数——变状态空间表示为传递函数表示ss2zp函数——变状态空间表示为零极点表示编写程序,记录实验结果,并给出系统传递函数模型和零极点模型。
自动控制原理实验目录实验一二阶系统阶跃响应(验证性实验) (1)实验三控制系统的稳定性分析(验证性实验) (9)实验三系统稳态误差分析(综合性实验) (15)预备实验典型环节及其阶跃响应一、实验目的1.学习构成典型环节的模拟电路,了解电路参数对环节特性的影响。
2.学习典型环节阶跃响应测量方法,并学会由阶跃响应曲线计算典型环节传递函数。
二、实验内容搭建下述典型环节的模拟电路,并测量其阶跃响应。
1.比例(P)环节的模拟电路及其传递函数示于图1-1。
2.惯性(T)环节的模拟电路及其传递函数示于图1-2。
3.积分(I)环节的模拟电路及其传递函数示于图1-3。
4. 比例积分(PI)环节的模拟电路及其传递函数示于图1-4。
5.比例微分(PD)环节的模拟电路及其传递函数示于图1-5。
6.比例积分微分(PID)环节的模拟电路及其传递函数示于图1-6。
三、实验报告1.画出惯性环节、积分环节、比例积分环节、比例微分环节、比例积分微分环节的模拟电路图,用坐标纸画出所记录的各环节的阶跃响应曲线。
2.由阶跃响应曲线计算出惯性环节、积分环节的传递函数,并与由模拟电路计算的结果相比较。
附1:预备实验典型环节及其阶跃响应效果参考图比例环节阶跃响应惯性环节阶跃响应积分环节阶跃响应比例积分环节阶跃响应比例微分环节阶跃响应比例积分微分环节阶跃响应附2:由模拟电路推导传递函数的参考方法1. 惯性环节令输入信号为U 1(s) 输出信号为U 2(s) 根据模电中虚短和虚断的概念列出公式:整理得进一步简化可以得到如果令R 2/R 1=K ,R 2C=T ,则系统的传递函数可写成下面的形式:()1KG s TS =-+当输入r(t)为单位脉冲函数时 则有输入U 1(s)=1输出U 2(s)=G(s)U 1(s)= 1KTS-+由拉氏反变换可得到单位脉冲响应如下:/(),0t TK k t e t T-=-≥ 当输入r(t)为单位阶跃函数时 则有输入U 1(s)=1/s输出U 2(s)=G(s)U 1(s)= 11K TS s-+由拉氏反变换可得到单位阶跃响应如下:/()(1),0t T h t K e t -=--≥当输入r(t)为单位斜坡函数时 则有输入U 1(s)=21s输出U 2(s)=G(s)U 1(s)=2323R R C T R R =+2Cs12Cs-(s)U R10-(s)U 21R R +-=12212)Cs (Cs 1(s)U (s)U )(G R R R s +-==12212)Cs 1((s)U (s)U )(G R R R s +-==由拉氏反变换可得到单位斜坡响应如下:/()(1),0t T c t Kt KT e t -=--≥2. 比例微分环节令输入信号为U 1(s) 输出信号为U 2(s) 根据模电中虚短和虚断的概念列出公式:(s)(s)(s)(s)(s)U100-U U 0U 2=1R1R23(4)CSU R R '''---=++由前一个等式得到 ()1()2/1U s U s R R '=- 带入方程组中消去()U s '可得1()1()2/11()2/12()1134U s U s R R U s R R U s R R R CS+=--+由于14R C〈〈,则可将R4忽略,则可将两边化简得到传递函数如下: 2()23232323()(1)1()11123U s R R R R R R R R G s CS CS U s R R R R R ++==--=-++如果令K=231R R R +, T=2323R R C R R +,则系统的传递函数可写成下面的形式:()(1)G s K TS =-+当输入r(t)为单位脉冲函数时,单位脉冲响应不稳定,讨论起来无意义 当输入r(t)为单位阶跃函数时 则有输入U 1(s)=1/s输出U 2(s)=G(s)U 1(s)=(1)K TS S-+由拉氏反变换可得到单位阶跃响应如下:()(),0h t KT t K t δ=+≥当输入r(t)为单位斜坡函数时 则有输入U 1(s)=21s输出U 2(s)=G(s)U 1(s)=2(1)K TS S -+由拉氏反变换可得到单位斜坡响应如下:(),0c t Kt KT t =+≥实验一 二阶系统阶跃响应(验证性实验)一、实验目的研究二阶系统的两个重要参数阻尼比ξ和无阻尼自然频率n ω对系统动态性能的影响。
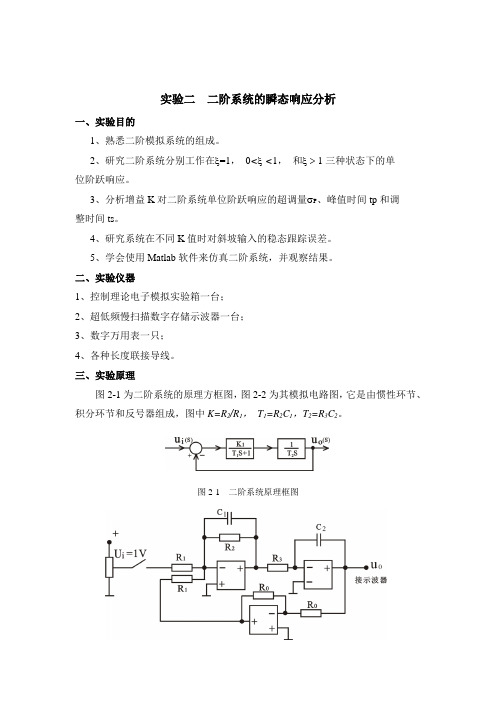
实验二二阶系统的瞬态响应分析一、实验目的1、熟悉二阶模拟系统的组成。
2、研究二阶系统分别工作在ξ=1,0<ξ<1,和ξ> 1三种状态下的单位阶跃响应。
3、分析增益K对二阶系统单位阶跃响应的超调量σP、峰值时间tp和调整时间ts。
4、研究系统在不同K值时对斜坡输入的稳态跟踪误差。
5、学会使用Matlab软件来仿真二阶系统,并观察结果。
二、实验仪器1、控制理论电子模拟实验箱一台;2、超低频慢扫描数字存储示波器一台;3、数字万用表一只;4、各种长度联接导线。
三、实验原理图2-1为二阶系统的原理方框图,图2-2为其模拟电路图,它是由惯性环节、积分环节和反号器组成,图中K=R2/R1,T1=R2C1,T2=R3C2。
图2-1 二阶系统原理框图图2-1 二阶系统的模拟电路由图2-2求得二阶系统的闭环传递函1222122112/() (1)()/O i K TT U S K U S TT S T S K S T S K TT ==++++ :而二阶系统标准传递函数为(1)(2), 对比式和式得n ωξ==12 T 0.2 , T 0.5 , n S S ωξ====若令则。
调节开环增益K 值,不仅能改变系统无阻尼自然振荡频率ωn 和ξ的值,可以得到过阻尼(ξ>1)、临界阻尼(ξ=1)和欠阻尼(ξ<1)三种情况下的阶跃响应曲线。
(1)当K >0.625, 0 < ξ < 1,系统处在欠阻尼状态,它的单位阶跃响应表达式为:图2-3 0 < ξ < 1时的阶跃响应曲线(2)当K =0.625时,ξ=1,系统处在临界阻尼状态,它的单位阶跃响应表达式为:如图2-4为二阶系统工作临界阻尼时的单位响应曲线。
(2) +2+=222nn nS S )S (G ωξωω1()1sin( 2-3n to d d u t t tgξωωωω--=+=式中图为二阶系统在欠阻尼状态下的单位阶跃响应曲线etn o n t t u ωω-+-=)1(1)(图2-4 ξ=1时的阶跃响应曲线(3)当K < 0.625时,ξ> 1,系统工作在过阻尼状态,它的单位阶跃响应曲线和临界阻尼时的单位阶跃响应一样为单调的指数上升曲线,但后者的上升速度比前者缓慢。
控制工程基础实验指导书自控原理实验室编印(内部教材)实验项目名称:(所属课程:)院系:专业班级:姓名:学号:实验日期:实验地点:合作者:指导教师:本实验项目成绩:教师签字:日期:(以下为实验报告正文)一、实验目的简述本实验要达到的目的。
目的要明确,要注明属哪一类实验(验证型、设计型、综合型、创新型)。
二、实验仪器设备列出本实验要用到的主要仪器、仪表、实验材料等。
三、实验内容简述要本实验主要内容,包括实验的方案、依据的原理、采用的方法等。
四、实验步骤简述实验操作的步骤以及操作中特别注意事项。
五、实验结果给出实验过程中得到的原始实验数据或结果,并根据需要对原始实验数据或结果进行必要的分析、整理或计算,从而得出本实验最后的结论。
六、讨论分析实验中出现误差、偏差、异常现象甚至实验失败的原因,实验中自己发现了什么问题,产生了哪些疑问或想法,有什么心得或建议等等。
七、参考文献列举自己在本次准备实验、进行实验和撰写实验报告过程中用到的参考文献资料。
格式如下:作者,书名(篇名),出版社(期刊名),出版日期(刊期),页码实验一 控制系统典型环节的模拟一、实验目的1、掌握比例、积分、实际微分及惯性环节的模拟方法;2、通过实验熟悉各种典型环节的传递函数和动态特性;3、了解典型环节中参数的变化对输出动态特性的影响。
二、实验仪器1、控制理论电子模拟实验箱一台;2、超低频慢扫描数字存储示波器一台;3、数字万用表一只;4、各种长度联接导线。
三、实验原理以运算放大器为核心元件,由其不同的R-C 输入网络和反馈网络组成的各种典型环节,如图1-1所示。
图中Z1和Z2为复数阻抗,它们都是R 、C 构成。
图1-1 运放反馈连接基于图中A 点为电位虚地,略去流入运放的电流,则由图1-1得:21()o i u ZG s u Z ==-(1-1) 由上式可以求得下列模拟电路组成的典型环节的传递函数及其单位阶跃响应。
1、比例环节实验模拟电路见图1-2所示图1-2 比例环节传递函数:21()R G s K R =-=- 阶跃输入信号:-2V 实验参数:(1) R 1=100K R 2=100K (2) R 1=100K R 2=200K 2、 惯性环节实验模拟电路见图1-3所示图1-3 惯性环节传递函数:2212211211()11R CS R Z R K CS G s Z R R R CS TS +=-=-=-=-++阶跃输入:-2V 实验参数:(1) R 1=100K R 2=100K C=1µf (2) R=100K R 2=100K C=2µf 3、积分环节实验模拟电路见图1-4所示图1-4 积分环节传递函数:21111()Z CS G s Z R RCS TS=-=-=-= 阶跃输入信号:-2V 实验参数:(1) R=100K C=1µf (2) R=100K C=2µf 4、比例微分环节实验模拟电路见图1-5所示图1-5 比例微分环节传递函数:22211111()(1)(1)1D Z R R G S R CS K T S R Z R CS R CS =-=-=-+=-++其中TD =R1C K=12RR阶跃输入信号:-2V 实验参数:(1)R1=100K R2=100K C=1µf(2)R1=100K R2=200K C=1µf四、实验内容与步骤1、分别画出比例、惯性、积分、比例微分环节的电子电路;2、熟悉实验设备并在实验设备上分别联接各种典型环节;3、按照给定的实验参数,利用实验设备完成各种典型环节的阶跃特性测试,观察并记录其单位阶跃响应波形。
目录目录 (1)实验一数据输入输出通道 (2)实验二信号采样与保持 (5)实验三数字PID控制 (7)实验四直流电机闭环调速控制 (9)实验五温度闭环数字控制 (11)实验六最少拍控制器的设计与实现 (13)附录 (15)实验一数据输入输出通道实验目的:1.学习A/D转换器原理及接口方法,并掌握ADC0809芯片的使用。
2.学习D/A转换器原理及接口方法,并掌握TLC7528芯片的使用。
实验设备:PC机一台,TD-ACC+实验系统一套,i386EX系统板一块实验内容:1.编写实验程序,将-5V~+5V的电压作为ADC0809的模拟量输入,将转换所得的8位数字量保存于变量中。
2.编写实验程序,实现D/A转换产生周期性三角波,并用示波器观察波形。
实验原理:1.A/D转换实验ADC0809芯片主要包括多路模拟开关和A/D转换器两部分,其主要特点是:单电源供电、工作时钟CLOCK最高可达到1200KHz、8位分辨率,8个单端模拟输入端,TTL电平兼容等,可以很方便地和微处理器接口。
ADC0809 芯片,其输出八位数据线以及CLOCK 线已连到控制计算机的数据线及系统应用时钟1MCLK (1MHz)上。
其它控制线根据实验要求可另外连接(A、B、C、STR、/OE、EOC、IN0~IN7)。
实验线路图1-1为:图1-1 A/D转换实验接线图上图中,AD0809 的启动信号"STR"是由控制计算机定时输出方波来实现的。
"OUT1" 表示386EX 内部1#定时器的输出端,定时器输出的方波周期=定时器时间常数。
ADC0809 芯片输入选通地址码A、B、C 为"1"状态,选通输入通道IN7;通过单次阶跃单元的电位器可以给A/D 转换器输入-5V ~ +5V 的模拟电压;系统定时器定时1ms 输出方波信号启动A/D 转换器,并将A/D 转换完后的数据量读入到控制计算机中,最后保存到变量中。
编著 李蔓华 陈昌虎 李晓高自动控制理论实验指导书目录实验装置简介·························································(3-4·)实验一控制系统典型环节的模拟·················(5-6)实验二一阶系统的时域响应及参数测定·····(6-7)实验三二阶系统的瞬态响应分析·················(8-9)实验四频率特性的测试·······························(9-13)实验五PID控制器的动态特性······················(13-15)实验六典型非线性环节·································(15-18)实验七控制系统的动态校正(设计性实验)··(19)备注:本实验指导书适用于自动化、电子、机设专业,各专业可以根据实验大纲选做实验。
控制工程基础实验指导书自控原理实验室编印(内部教材)实验项目名称:(所属课程:)院系:专业班级:姓名:学号:实验日期:实验地点:合作者:指导教师:本实验项目成绩:教师签字:日期:(以下为实验报告正文)一、实验目的简述本实验要达到的目的。
目的要明确,要注明属哪一类实验(验证型、设计型、综合型、创新型)。
二、实验仪器设备列出本实验要用到的主要仪器、仪表、实验材料等。
三、实验内容简述要本实验主要内容,包括实验的方案、依据的原理、采用的方法等。
四、实验步骤简述实验操作的步骤以及操作中特别注意事项。
五、实验结果给出实验过程中得到的原始实验数据或结果,并根据需要对原始实验数据或结果进行必要的分析、整理或计算,从而得出本实验最后的结论。
六、讨论分析实验中出现误差、偏差、异常现象甚至实验失败的原因,实验中自己发现了什么问题,产生了哪些疑问或想法,有什么心得或建议等等。
七、参考文献列举自己在本次准备实验、进行实验和撰写实验报告过程中用到的参考文献资料。
格式如下:作者,书名(篇名),出版社(期刊名),出版日期(刊期),页码实验一 控制系统典型环节的模拟一、实验目的1、掌握比例、积分、实际微分及惯性环节的模拟方法;2、通过实验熟悉各种典型环节的传递函数和动态特性;3、了解典型环节中参数的变化对输出动态特性的影响。
二、实验仪器1、控制理论电子模拟实验箱一台;2、超低频慢扫描数字存储示波器一台;3、数字万用表一只;4、各种长度联接导线。
三、实验原理以运算放大器为核心元件,由其不同的R-C 输入网络和反馈网络组成的各种典型环节,如图1-1所示。
图中Z1和Z2为复数阻抗,它们都是R 、C 构成。
图1-1 运放反馈连接基于图中A 点为电位虚地,略去流入运放的电流,则由图1-1得:21()o i u ZG s u Z ==-(1-1) 由上式可以求得下列模拟电路组成的典型环节的传递函数及其单位阶跃响应。
1、比例环节实验模拟电路见图1-2所示图1-2 比例环节传递函数:21()R G s K R =-=- 阶跃输入信号:-2V 实验参数:(1) R 1=100K R 2=100K (2) R 1=100K R 2=200K 2、 惯性环节实验模拟电路见图1-3所示图1-3 惯性环节传递函数:2212211211()11R CS R Z R K CS G s Z R R R CS TS +=-=-=-=-++阶跃输入:-2V 实验参数:(1) R 1=100K R 2=100K C=1µ f23、积分环节实验模拟电路见图1-4所示图1-4 积分环节传递函数:21111()Z CS G s Z R RCS TS=-=-=-= 阶跃输入信号:-2V 实验参数:(1) R=100K C=1µ f (2) R=100K C=2µ f 4、比例微分环节实验模拟电路见图1-5所示图1-5 比例微分环节传递函数:22211111()(1)(1)1D Z R R G S R CS K T S R Z R CS R CS =-=-=-+=-++ 其中 T D =R 1C K=12R R 阶跃输入信号:-2V 实验参数:12(2)R1=100K R2=200K C=1µ f四、实验内容与步骤1、分别画出比例、惯性、积分、比例微分环节的电子电路;2、熟悉实验设备并在实验设备上分别联接各种典型环节;3、按照给定的实验参数,利用实验设备完成各种典型环节的阶跃特性测试,观察并记录其单位阶跃响应波形。
昆明理工大学机电学院机械工程专业研究生实验《现代控制工程》MATLA实验指导书昆明理工大学机电工程学院现代控制工程》MATLAB 实验指导书一、MATLAB 简介1 MATLAB 概述MATLAB 是MA Trix LABoratory 的缩写,早期主要用于现代控制中复杂的矩阵、向量的各种运算。
由于MA TLAB 提供了强大的矩阵处理和绘图功能,很多专家因此在自己擅长的领域用它编写了许多专门的MATLAB 工具包( toolbox ),如控制系统工具包( control systems toolbox );系统辨识工具包( system identification toolbox );信号处理工具包( signal processing toolbox );鲁棒控制工具包( robust control toolbox );最优化工具包(optimization toolbox )等等。
由于MA TLAB 功能的不断扩展,所以现在的MATLAB 已不仅仅局限与现代控制系统分析和综合应用,它已是一种包罗众多学科的功能强大的“技术计算语言( TheLanguage of Technical Computing )”。
MathWorks 公司于1992 年推出了具有划时代意义的MATLAB 4.0 版本,并推出了交互式模型输入与仿真系统SIMULINK ,它使得控制系统的仿真与CAD 应用更加方便、快捷,用户可以方便地在计算机上建模和仿真实验。
1997 年MathWorks 推出的MA TLAB 5.0 版允许了更多的数据结构,1999 年初推出的MA TLAB 5.3 版在很多方面又进一步改进了MATLAB 语言的功能。
2000 年底推出的MATLAB 6.0 。
最新版本是MA TLAB7.0 。
MATLAB 以矩阵作为基本编程单元,它提供了各种矩阵的运算与操作,并有较强的绘图功能。
MATLAB 集科学计算、图像处理、声音处理于一身,是一个高度的集成系统,有良好的用户界面,并有良好的帮助功能。
现代控制理论》实验指导书王璐自动化07-1 班山东科技大学机电系实验一系统的传递函数阵和状态空间表达式的转换、实验目的1 •学习多变量系统状态空间表达式的建立方法、了解状态空间表达式与传递函数相互转换的 方法; 2.通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数相互转换方法。
、实验要求学习和了解系统状态方程的建立与传递函数相互转换的方法;其中A 为n x n 维系数矩阵、B 为n x r 维输入矩阵C 为m x n 维输出矩阵,D 为传递阵,一般情况下为0。
系统的传递函数阵和状态空间表达式之间的关系如式(1 — 2)示。
式(1.2)中,num(s)表示传递函数阵的分子阵,其维数是 m x r ; den(s)表示传递函数阵的按s 降幕排列的分母。
五、实验步骤1 .据所给系统的传递函数或( A 、B 、C 阵),依据系统的传递函数阵和状态空间表达式之间的 关系如式(1— 2),采用MATLA B file.m 编程。
注意:ss2tf 和tf2ss 是互为逆转换的指令; 2. 在MATLA 界面下调试程序,并检查是否运行正确。
3. 已知MIMO 系统的系统的传递函数,求系统的空间状态表达式。
系统的传递函数为:4. 从系统的传递函数(1.4)式求状态空间表达式。
程序:num =[0 0 1 2;0 1 5 3]; %在给num 赋值时,在系数前补0,必须使num 和den 赋值的个 数相同; den =[1 2 3 4];[A,B,C,D]=tf2ss( num,de n)二、实验设备1. 计算机1台2.MATLAB6.X 软件 1 套。
四、实验原理说明设系统的模型如式 x Axy Cx(1 — 1)示。
Bu x DuR n u R r y R m(1— 1)G (S )器 C (SI A )1B D(1 — 2)G(S)s 2 5s 3 s 32s 23s 4(1 — 4)程序运行结果A =-2 -3 -4 1 0 0 0 1B =1 0 0在已知系统的状态空间表达式可以求得系统的传递函数,现在已知系统的状态空间表达式来求 系统的传递函数,对上述结果进行相应的验证。
程序如下:程序:%首先给A 、B 、C 、D 阵赋值; A=[-2 -3 -4;1 0 0;0 1 0]; B=[1;0;0]; C=[0 1 2;1 5 3]; D=[0;0];%状态空间表达式转换成传递函数阵的格式为 [n um,de n]=ss2tf(a,b,c,d,u)[n um,de n]=ss2tf(A,B,C,D,1) 程序运行结果:num =0 -0.0000 1.0000 2.0000 01.00005.0000 3.0000den =1.00002.00003.00004.0000 从程序运行结果得到:系统的传递函数为:实验2多变量系统的能控、能观分析、实验目的1. 学习多变量系统状态能控性分析的定义及判别方法; 2 .学习多变量系统状态能观性分析的定义及判别方法;3. 通过用MATLAB 编程、上机调试,掌握多变量系统能控性判别方法。
、实验要求C =0 1 2 153D =0 0 G(S)s 2 5s 3 s 3 2s 2 3s 41 .掌握系统的能控性分析方法。
2 .掌握能观性分析方法。
二、实验设备1 .计算机1台2. MATLAB6.X 软件 1 套。
四、实验原理说明1. 设系统的状态空间表达式系统的能控分析是多变量系统设计的基础,包括能控性的定义和能控性的判别。
系统状态能控性的定义的核心是: 对于线性连续定常系统 (2— 1),若存在一个分段连续的输入函 数U( t ),在有限的时间(t 1-t 0)内,能把任意给定的初态 x ( t o )转移至预期的终端 x ( t 1),则称此 状态是能控的。
若系统所有的状态都是能控的,则称该系统是状态完全能控的。
2. 能控性判别状态能控性分为一般判别和直接判别法,直接判别法是针对系统的系数阵 A 是对角标准形或约当标准形的系统,判别时不用计算,应用公式直接判断,是一种直接简易法;前者状态能控性分为一般 判别是应用最广泛的一种判别法。
输出能控性判别式为:n 1RankQ y Ran kCB CAB CA B p(2 — 2)状态能控性判别式为:n 1RankQ c Rank B AB A B n(2 — 3)系统的能观分析是多变量系统设计的基础,包括能观性的定义和能观性的判别。
系统状态能观性的定义:对于线性连续定常系统( 2— 1 ),如果对t °时刻存在t a , t 0<t a < ,根据[t 0, t a ]上的y(t)的测量值,能够唯一地确定 S 系统在t 0时刻的任意初始状态 X 0,则称系统S 在t 0时刻 是状态完全能观测的,或简称系统在 [t 0, t a ]区间上能观测。
状态能观性分为一般判别和直接判别法,后者是针对系统的系数阵 A 是对角标准形或约当标准形的系统,状态能观性判别时不用计算,应用公式直接判断,是一种直接简易法;前者状态能观性分为 一般判别是应用最广泛的一种判别法。
状态能控性判别式为:3.只要系统的A 的特征根实部为负,系统就是状态稳定的。
式(1 — 2)又可写成:当状态方程是系统的最小实现时,D(S) SI A ,系统的状态渐近稳定与系统的 BIBO (有界输 入有界输出)稳定等价;当D(s) sI A 时,若系统状态渐近稳定则系统一定是的BIBO 稳定的。
x Ax Bu y Cx Dux R n u R r y R m(2 — 1)RankQ Ra nkC CACA n 1T n(2 — 4)G(s) NS 册 C(SI A)1B °(2.5)五、实验步骤1. 先调试 [例 2.1] 、[例 2.2]系统能控性、能观性程序,然后根据所给系统的系数阵 A 和输入阵 B ,依据 2.3 能控性、能观性判别式,对所给系统采用 MATLA 的 file.m 编程;在 MATLA 界面下 调试程序,并检查是否运行正确。
2.调试[例 2.3] 系统稳定性分析程序,验证稳定性判据的正确性。
3. 按实验要求,判断所给的具有两个输入的四阶系统的能控性。
已知系数阵 A 和输入阵 B 分别如下,判断系统的状态能控性3020 0110 A1121 0101程序: A =B =[3 0 2 0[ 0 1 0 1 1 00 1 1 2 10 1 0 11]10]q1=B;q2=A*B;%将 AB 的结果放在 q2 中q3=A A2*B;%将 A 2B 的结果放在 q3 中,q4=A A 3*B;%将 A 3B 的结果放在 q4 中,Qc=[q1 q2 q3 q4]%将能控矩阵 Qc 显示在 MATLAB 的窗口 Q=rank(Qc) %能控矩阵 Qc 的秩放在 Q3 0 2 0 0 1 1 0 A, C 1 0 1 01 12 1 0 1 0 1程序:A =[32 0 011 00 1 0 5 2 21 12 87 0 0 0 1 1 4 4 16 01 1 3 3 12 10 50 111125程序运行结果4从程序运行结果可知,能控矩阵Qc 的秩为4=n ,所以系统是状态能控性的。
已知系数阵A 和输入阵C 分别如下,判断系统的状态能观性。
01 00 B01 10Q =%将 CA 的结果放在 q2 中 %将 CA 2的结果放在 q3 中, %将 CA 3的结果放在 q4 中, %将能观矩阵 Qo 显示在 MA TLAB 的窗口%能观矩阵 Qo 的秩放在 Q 程序运行结果Qo =16 6 17 5 65 28 72 22能控矩阵Qo 的秩为4=n ,由式(2- 4)可知,系统是状态完全能观性的。
实验 3 应用 MATLAB 计算线性定常系统的矩阵指数(状态转移矩阵 )实验原理说明 应用 MATLAB 符号数学工具箱求矩阵指数闭合解析式 基于矩阵指数的拉普拉斯变换求解法,可调用 MATLAB 符号数学工具箱( Symbolic Math Toolbox )中的符号运算函数先算出“预解矩阵” [(si A)1],再对“预解矩阵” 进行拉普拉斯反变换即求得 e At 另外,MATLAB 符号数学工具箱中有专用于计算矩阵指数的指令 expm ()可调用。
实验内容及结果已知 A=[4 1 -2;1 0 2;1 -1 3],应用 MATLAB 求e At 实验程序解 MATLAB Program 2_1a 给出了基于拉普拉斯变换求 e At 的 MATLAB 程序。
%MATLABProgram 2_1a syms s t %定义基本符号变量 s 和 t A=[4 1 -2;1 0 2;1 -1 3];FS=inv(s*eye(3)-A); %求预解矩阵At11e AtL 1[(si A) 1]eAt=ilaplace(FS,s,t); %求 eAt=simplify(eAt) %化简 e At 的表达式 程序 MATLAB Program 2_1a 运行结果如下 eAt =[ (1+t)*exp(3*t), t*exp(3*t), -2*t*exp(3*t)] [t*exp(3*t), -exp(3*t)+t*exp(3*t)+2*exp(t), -2*t*exp(3*t)-2*exp(t)+2*exp(3*t)] [t*exp(3*t), t*exp(3*t)+exp(t)-exp(3*t), -exp(t)-2*t*exp(3*t)+2*exp(3*t)] 实验程序应用数值矩阵的指数运算函数 expm ()求e Atl 对应于t=t1 (为某一常数)的值1 12 1 0 1 0 1]C=[1 0 1 0]; q1=C; q2=C*A; q3=C*A A 2; q4=C*A A 3; Qo=[q1; q2; q3;q4] Q=rank(Qo)从程序运行结果可知,MATLAB Program 2_2给出了调用expm ()求题中矩阵A的矩阵指数t=t1=0.1对应于e At的值的MATLAB 程序。
程序%MATLAB Program 2_2A=[4 1 -2;1 0 2;1 -1 3];T=0.1;eAT=expm(A*T) 程序MATLAB Program 2_2 运行结果如下:eAT =1.4848 0.1350 -0.27000.1350 0.9955 0.21940.1350 -0.1097 1.3246数值矩阵运算函数expm ()也可以只进行符号计算,程序如下:%MATLAB Program 2_2 b syms t; %定义符号变量tA=[4 1 -2;1 0 2;1 -1 3];eAT=expm(A*t)程序MATLAB Program 2_2b 运行结果如下:eAT =[exp(3*t)+t*exp(3*t), t*exp(3*t), -2*t*exp(3*t)] [t*exp(3*t), -exp(3*t)+t*exp(3*t)+2*exp(t), -2*t*exp(3*t)-2*exp(t)+2*exp(3*t)][t*exp(3*t), t*exp(3*t)+exp(t)-exp(3*t), -exp(t)-2*t*exp(3*t)+2*exp(3*t)]和程序MATLAB Program 2_1a 运行结果相同实验4 应用MATLAB 求定常系统时间响应实验内容及结果设双输入双输出系统状态空间矩阵为A=[-3 1 0;0 -3 0;0 0 -1],B=[1 -1;0 0;2 0],C=[1 0 1;-1 1 0],D=0;且设u1(t)=1(t),u2(t)=1(t),系统初始状态为零。