一文教会你红外线遥控器软件解码程序
- 格式:doc
- 大小:41.00 KB
- 文档页数:10
遥控器解码器的使用流程1. 简介遥控器解码器是一种用于接收和解码红外线遥控信号的设备。
它可以将接收到的信号转换为数字信号,并根据指令进行相应的操作。
本文将介绍遥控器解码器的使用流程。
2. 准备工作在开始使用遥控器解码器之前,需要进行以下准备工作: - 确保遥控器解码器和设备之间的连接正确并可靠。
遥控器解码器通常有一个红外线接收头,需要将其连接到设备的红外线输入接口上。
- 确保遥控器解码器的供电正常。
遥控器解码器通常需要外部供电,可以通过连接适配器或者直接连接电源进行供电。
3. 设置遥控器解码器在开始使用遥控器解码器之前,需要设置一些参数,以确保其可以正确接收和解码遥控信号。
具体的设置步骤如下: 1. 打开遥控器解码器的电源开关,确保其正常供电。
2. 检查遥控器解码器的显示屏或指示灯,以确认其处于工作状态。
3. 使用遥控器解码器配套的遥控器,按下设置按钮进入设置模式。
4. 在遥控器解码器的显示屏上,选择对应的设置选项,如接收频率、解码方式等。
可以根据设备的需求进行设置。
5. 完成设置后,按下确认按钮保存设置,并退出设置模式。
6. 检查遥控器解码器的显示屏或指示灯,以确认设置是否生效。
4. 使用遥控器解码器在完成设置后,就可以开始使用遥控器解码器进行遥控操作了。
下面是使用遥控器解码器的一般流程: 1. 将需要遥控的设备置于适当的位置,并确保遥控器解码器可以正常接收到设备发出的红外线遥控信号。
2. 使用配套的遥控器对设备进行操作,如按下开关、调节音量等。
3. 遥控器解码器会接收到红外线遥控信号,并将其转换为数字信号。
4. 遥控器解码器会根据接收到的数字信号进行解码,并根据解码结果执行相应的操作,如控制设备的开关状态、音量大小等。
5. 操作完成后,遥控器解码器会将执行结果反馈给用户,如在显示屏上显示相关信息、发出声音等。
5. 注意事项在使用遥控器解码器时,需要注意以下事项: - 遥控器解码器需要处于可靠的供电状态,以确保其正常工作。
红外遥控器软件解码及其应用红外遥控器软件解码及其应用摘要:通过对红外遥控器各按键发送冲波形的分析可以识别码型,从而为软件解码提供依据。
本文以实例介绍红外遥控器与单片机的硬件接口,并从原理出发给出软件解码的方法。
这是一个可以直接引用的成功例子,同时也为各类红外遥控器在单片机控制产品中的开发应用提供了一个非常实用的参考。
关键词:遥控器软件解码单片机在单片机控制产品的开发应用中,为了向控制系统软件控制命令,键盘往往是不可缺少的。
传统方法是利用并行输入/输出接口芯片扩展一个键盘接口,或者直接利用单片机的并行端口进行扩展。
在某些应用环境下,这种方式2个弊端:①键盘和控制系统连在一起,不灵活,环境适应性差;②浪费单片机的端口,且硬件成本较高。
使用红外遥控器作为控制系统的输入设备,具有成本低、灵活方便的特点。
本文目的就在于介绍软件解码研究的一般方法和红外遥控器进行二次开发的应用技术。
该方法已在多个应用系统设计中成功地实现,效果良好。
红外遥控器是一种非常容易买到,且价格便宜的产品,种类很多,但它们都是配合某种特定电子产品的(如各种电视机、VCD、空调器等),由专用CPU解码,作为一般的单片机控制系统能直接使用。
使用现成遥控器作为控制系统的输入,需要解决如下几个问题:如何接收红外遥控信号;如何识别红外遥控信号;解码软件的设计。
其它的问题都是非本质的,例如遥控器面板功能键标注的问题,可自行设计、重印即可。
1红外遥控信号的接收接收电路可以使用集成红外接收器成品。
接收器包括红外接收管和信号处理IC.接收器对外只有3个引脚:Vcc、GND和1个脉冲信号输出PO.与单片机接口非常方便,如图1所示。
①Vcc接系统的电源正极(+5V);②GND接系统的地线(0V);③脉冲信号输出接CPU的中断输入引脚(例如8031的13脚INT1)。
采取这种连接方法,软件解既可工作于查询方式,也可工作于中断方式。
2脉冲流分析要了解一个未知的遥控器,首先要分析其脉冲流,从而了解其脉冲波形特征(以何种方式携带“0”、“1”信息),进而了解其编码规律。
红外遥控器软件解码及其应用随着现代科技的不断发展,红外遥控器已经成为人们日常生活中的必备工具之一。
不过,很多人并不了解红外遥控器的工作原理以及它是如何通过软件解码来实现遥控效果的。
本文将详细介绍红外遥控器软件解码的相关知识,以及其在实际应用中的作用。
一、红外遥控器的工作原理首先,我们需要了解红外遥控器的工作原理。
简单来说,红外遥控器是一种利用红外线光谱来传输指令的设备,通过在发射端发送编码的红外信号,再在接收端解码后执行相应的指令。
通常,红外遥控器由发射部分与接收部分两个部分组成。
发射部分由红外LED发射器构成,它会通过红外发射现象来发送编码的红外信号。
在接收端,红外接收器则会接收到这些信号,并将其转换成电信号进行解码。
之后,解码器会解析出信号的编码含义,然后执行相应的指令。
这就是红外遥控器的基本工作原理。
二、红外遥控器软件解码的实现在红外遥控器的工作中,软件解码起到了重要的作用。
所谓软件解码,就是在终端设备中运行的一种程序,能够将遥控器发射的红外编码转换成可读的指令。
而这些指令就可以用于控制各种家电、设备等。
软件解码的实现主要有两种方式。
第一种是使用硬件解码器,这需要在终端设备上安装一个专门的硬件解码器,用于解析红外信号,并输出相应的指令。
第二种方法则是使用软件解码器,这需要在终端设备上安装一个软件程序,用于解析红外信号并输出指令。
在软件解码的实现中,最常见的是使用赛贝尔红外编解码库。
这个库已经成为了广泛使用的一种红外编解码方案。
它可以用于各种嵌入式设备、物联网设备、手机、电视机顶盒等多种应用场景中。
三、红外遥控器软件解码的应用目前,红外遥控器软件解码已广泛应用于各种智能家居、物联网设备、工控设备等领域。
下面列举一些具体的应用案例:1、智能家居:通过使用红外遥控器软件解码,可以实现对家中的各种电器、设备的遥控控制。
如电视、空调、照明设备等。
2、物联网设备:红外遥控器软件解码还可以用于物联网设备中,如智能家居中的智能门锁、智能家电等。

红外线遥控器解码程序这里我们以红外线遥控编码芯片为uPD6121G(或者是 HT622、7461等芯片)为例来说明用单片机实现红外遥控解码的详细过程,站长琢磨这个解码程序花了相当多的精力,期间几经修改逐步完善,后来还用它开发了几个小产品,希望能对网友学习单片机有所帮助。
红外线遥控是目前使用最广泛的一种通信和遥控手段。
由于红外线遥控装置具有体积小、功耗低、功能强、成本低等特点,因而,继彩电、录像机之后,在录音机、音响设备、空凋机以及玩具等其它小型电器装置上也纷纷采用红外线遥控。
工业设备中,在高压、辐射、有毒气体、粉尘等环境下,采用红外线遥控不仅完全可靠而且能有效地隔离电气干扰。
1 红外遥控系统通用红外遥控系统由发射和接收两大部分组成,应用编/解码专用集成电路芯片来进行控制操作,如图1所示。
发射部分包括键盘矩阵、编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、解码电路。
2 遥控发射器及其编码遥控发射器专用芯片很多,根据编码格式可以分成两大类,这里我们以运用比较广泛,解码比较容易的一类来加以说明,现以日本NEC的uPD6121G组成发射电路为例说明编码原理。
当发射器按键按下后,即有遥控码发出,所按的键不同遥控编码也不同。
这种遥控码具有以下特征:采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”,其波形如图2所示。
上述“0”和“1”组成的32位二进制码经38kHz的载频进行二次调制以提高发射效率,达到降低电源功耗的目的。
然后再通过红外发射二极管产生红外线向空间发射,如图3所示。
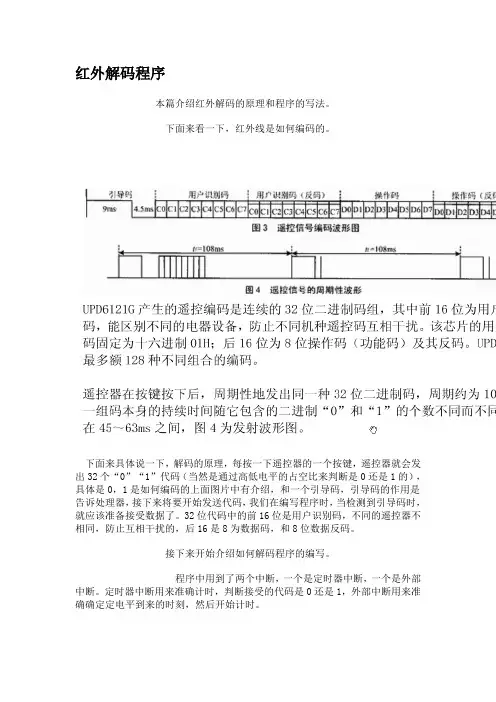
UPD6121G产生的遥控编码是连续的32位二进制码组,其中前16位为用户识别码,能区别不同的电器设备,防止不同机种遥控码互相干扰。
该芯片的用户识别码固定为十六进制01H;后16位为8位操作码(功能码)及其反码。
红外遥控解码程序红外接收头的型号有很多HS0038 VS838等功能⼤致相同,只是引脚封装不同。
红外接收有⼏种统⼀的编码⽅式,采样哪种编码⽅式取决于遥控器使⽤的芯⽚,接收头收到的都是⼀样的。
电视遥控器使⽤的是专⽤集成发射芯⽚来实现遥控码的发射,如东芝TC9012,飞利浦AA3010T等,通常彩电遥控信号的发射,就是将某个按键所对应的控制指令和系统码(由0和1组成的序列),调制在38KHz的载波上,然后经放⼤、驱动红外发射管将信号发射出去。
不同公司的遥控芯⽚,采样的遥控码格式也不⼀样,较普遍的有两种,⼀种NEC标准,⼀种是PHILIPS标准。
NEC标准:遥控载波的频率为38KHz(占空⽐1:3)当某个键按下时,系统⾸先发射⼀个完整的全码,如果按键超过108ms仍未松开,接下来发射的代码(连发代码)将由起始码(9ms)和结束码(2.5ms)组成。
⼀个完整的全码 = 引导码 +⽤户码 +⽤户码 + 数据码 + 数据码 + 数据反码。
其中,引导码⾼电平9ms,低电平4.5ms;系统码8位,数据码8位,共32位;其中前16位为⽤户识别码,能区别不同的红外遥控设备,以防⽌不同的机种遥控码互相⼲扰。
后16位为8位的操作码和8位的操作反码,⽤于核对数据是否接收准确。
收端根据数据码做出应该执⾏上⾯动作的判断。
连发代码是在持续按键时发送的码。
它告知接收端。
某键是在被连续的按着。
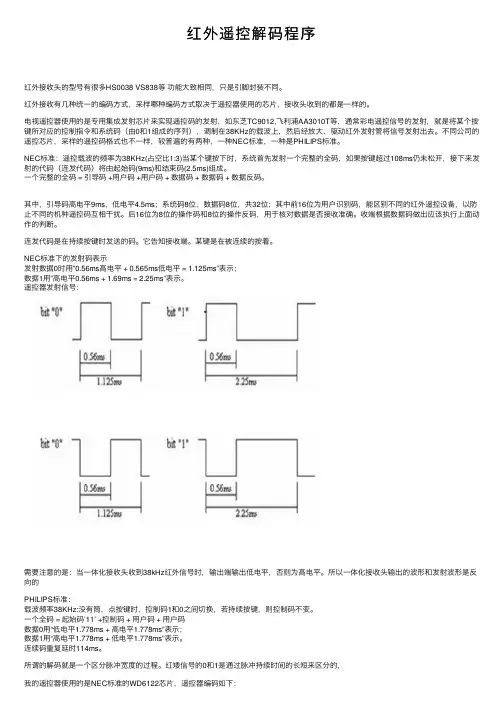
NEC标准下的发射码表⽰发射数据0时⽤”0.56ms⾼电平 + 0.565ms低电平 = 1.125ms”表⽰;数据1⽤”⾼电平0.56ms + 1.69ms = 2.25ms”表⽰。
遥控器发射信号:需要注意的是:当⼀体化接收头收到38kHz红外信号时,输出端输出低电平,否则为⾼电平。
所以⼀体化接收头输出的波形和发射波形是反向的PHILIPS标准:载波频率38KHz:没有筒,点按键时,控制码1和0之间切换,若持续按键,则控制码不变。
⼀个全码 = 起始码’11’ +控制码 + ⽤户码 + ⽤户码数据0⽤“低电平1.778ms + ⾼电平1.778ms”表⽰;数据1⽤“⾼电平1.778ms + 低电平1.778ms”表⽰。
红外解码程序本篇介绍红外解码的原理和程序的写法。
下面来看一下,红外线是如何编码的。
下面来具体说一下,解码的原理,每按一下遥控器的一个按键,遥控器就会发出32个“0”“1”代码(当然是通过高低电平的占空比来判断是0还是1的),具体是0,1是如何编码的上面图片中有介绍,和一个引导码,引导码的作用是告诉处理器,接下来将要开始发送代码,我们在编写程序时,当检测到引导码时,就应该准备接受数据了。
32位代码中的前16位是用户识别码,不同的遥控器不相同,防止互相干扰的,后16是8为数据码,和8位数据反码。
接下来开始介绍如何解码程序的编写。
程序中用到了两个中断,一个是定时器中断,一个是外部中断。
定时器中断用来准确计时,判断接受的代码是0还是1,外部中断用来准确确定定电平到来的时刻,然后开始计时。
/*********************************************************函数功能:红外解码,用八位数码管显示红外线的按键码,便于红外控制测试环境:hot 51学习板编译环境:keil4整理人:张家越QQ:435835181整理时间:2011-04-03************************************************************/#include<reg51.h>#define uchar unsigned char#define uint unsigned intuchar code seg_du[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0 x6f,0x77,0x7c,0x39,0x5E,0x79,0x71 };//0-f的段选码unsigned char code seg_we[]={0,1,2,3,4,5,6,7};uchar irtime,startflag,bitnum,irreceok;uchar irdata[33];uchar irprosok;uchar display[8];uchar ircode[8] ;sbit led1=P0^1;sbit led2=P0^2;/******************************************************************** ****函数功能:延时函数,在数码管显示时使用,不需要很精确********************************************************************* ****/void delay_50us(uint t){uchar j;for(;t>0;t--)for(j=19;j>0;j--);}/******************************************************************** ******函数的功能:定时器0的初始化********************************************************************* *****/void timer0init(){TMOD=0x02; //设置定时器工作在方式2TH0=0x00; //TL0=0x00; //设置定时器的初值ET0=1; //开定时器中断TR0=1; // 打开定时器EA=1; //开总中断}/******************************************************************** ****外部中断1的初始化********************************************************************* **/void int1init(){IT1=1; //设置触发方式为上升沿EX1=1; //开外部中断1EA=1; //开总中断}/******************************************************************** **定时器0的功能函数,每中断一次irtime++,用于计时********************************************************************* **/void timer0() interrupt 1{irtime++; //定时器中断一次irtime++,用于计时}/******************************************************************** ***外部中断0的处理函数,每当有低电平数据过来时,中断一次,(使用次中断的前提是,信号线必需接在外部中断0上面,也就是P3^2口),函数功能是,把信号从高低电平变成时间的代码放入irdata【】中********************************************************************* ***/void int1() interrupt 2{if(startflag){if(irtime>32) //一组代码检测完毕{bitnum=0;}irdata[bitnum]=irtime; //把检测到的时间送到数组irdata【】中去irtime=0;bitnum++;if(bitnum==33) //如果检测到bitnum=33,说明32位用户码已经检测完毕{bitnum=0; //将bitnum清零以便重新计数irreceok=1; //接收完毕标志位置一}}else //(此函数先进入else语句,跳过引导码的检测){startflag=1; //将开始标志位置一irtime=0; //设置时间初值为零irreceok=1; //接收完毕标志位置一}}/******************************************************************** *****函数功能:把irdata【】中的时间代码转换成二进制代码存放在ircode【】中********************************************************************* *****/void irpros(){uchar k=1,value,j,i;for(j=0;j<4;j++){for(i=0;i<8;i++){value=value>>1; //右移7次(第一次是00,相当于没有移位)if(irdata[k]>6) //循环8次{value=value|0x80;}k++;}ircode[j]=value;}irprosok=1;}/******************************************************************** ********函数的功能是:将ircode【】中的二进制代码转换成为16进制代码便于在数码管上显示******************************************************************* ********/void irwork(){display[0]=ircode[0]/16;display[1]=ircode[0]%16;display[2]=ircode[1]/16;display[3]=ircode[1]%16;display[4]=ircode[2]/16;display[5]=ircode[2]%16;display[6]=ircode[3]/16;display[7]=ircode[3]%16;}/******************************************************************** ****函数功能:用数码管显示解码结果********************************************************************* ***/void display1(){uchar i;for(i=0;i<8;i++){P2=seg_we[i];P0=seg_du[display[i]];delay_50us(40);}}void main(){timer0init(); //定时器初始化int1init(); //外部中断初始化while(1){if(irreceok) //判断数据接收完毕(数组中存储的是高低电平的时间){irpros(); //执行处理函数,将高低电平时间转化成16进制的0,1代码,存放在数组中irreceok=0; //标志清零}if(irprosok) //处理函数执行完毕,{irwork(); //将存储的16进制代码分离,便于数码管显示irprosok=0; //标志清零}display1();}}//在最后我再分析一下程序的编写思路,便于大家理解,一旦有按键按下,接受管接收到引导码,进入外部中断,并将高低电平的时间放入irdata【】数组中,接受完毕标志位置一,判断接受标志位,为1,进行处理函数,将高低电平转换成16进制数,处理标志位置一,判断处理标志位,为1,执行分离函数,将16进制数分离,便于数码管显示,分离完毕后显示。
所有红外遥控器的解码方法已经完成了DS1302,18B20,RS232通讯,24C02存储,红外遥控等.现只将红外遥控的解码方法贴出,希望能与大家交流,起到抛砖引玉的作用.我的开发环境是IAR FOR AVR 5.11, CPU为M8,晶振 11.0592.红外遥控解码原理是通过AVR的输入捕获功能,捕获信号后进行宽度判断,并通过串口在电脑中显示出来.下面是捕获的程序,数据未经处理,只是捕获后进行编码的解码.通过这个捕获程序,原则上能解所有线外遥控编码,我已经解了格力和中星九B的遥控编码,代码未优化,只是测试.#include <iom8.h>#include "MyDelay.h" //在此未提供我的延时程序,如果有需要的我再贴出#include "MyUSART.h"//在此未提供我的串口配置程序,如果有需要的我再贴出#ifndef uchar#define uchar unsigned char#endif#ifndef uint#define uint unsigned int#endifvoid ini(void){//配置输入捕获TCCR1A = 0x00;//普通端口模式,OC1A/B未连接TCCR1B = 0x81;//位7与位6是输入捕获允许和触发方式,BIT2-0,分频选择TCNT1H = 0x00;//计数器起始值高8位TCNT1L = 0x00;//计数器起始值低8位ICR1 = 0x0000;//输入捕获发生时,将该值写入TCNTTIMSK |= 0x20;//输入捕捉中断使能 BIT5 =1TIFR &= 0xdf;//输入捕捉标志,外部引脚 ICP1 出现捕捉事件时 ICF1置位}#pragma vector = TIMER1_CAPT_vect //定时器0溢出中断入口__interrupt void TimeINT0(void){uint r;uchar h,l;r = ICR1;//接收时序if(TCCR1B &= 0x40) //更改触发方式TCCR1B = 0x81; //下降沿触发elseTCCR1B = 0xc1;//上升沿触发TCNT1H = 0x00;//计数器起始值高8位TCNT1L = 0x00;//计数器起始值低8位TIFR |= 0x20;//输入捕捉标志,外部引脚 ICP1 出现捕捉事件时 ICF1置位h = (uchar)(r>>8);l = (uchar)r;USART_Send(h); //串口显示高八位USART_Send(l);//串口显示低八位}void main(void){ini();}以下是由串口调试助手显示的数据.说明:1.时间未用,我的程序也通过串口显示了,2.前两个字节无意义,是因为捕获到低电平后,16位计数器一直在计数,所以,前面的计数值无用.3.编码原理不管是曼彻斯特_码/日立的通用红外编码/PT2272码等,差不多都由(异步) 码头+引导+编码+停止位组成,大同小异,所以根据这个原理,解出了上述数据的码头,引导和键编码.再根据解出的码画出频率图.4.计算时要将显示的数据转换成10进制再计算.5.未知部分估计是停止位,不过只要能检测到码头,引导和编码就可以了.6.解码后,可以将该数据进行处理, 这时,这个遥控器就可以赋与功能,和开发板互动了.呵呵,7.为什么选中九B,因为中9B的遥控器不用花钱,中9老是升级,好多客户都不用了,所以又省了10元钱,一块敷铜板的钱,哈哈哈.8.题外话,中9想升级的可以和我交流,我已经升了很多了.9.好,希望该方法可以帮助需要的朋友.。
红外解码一直是单片机中应用较多的,需要设备加装专用解码芯片,这就大大减轻了单片机的负担。
需要单片机样例使用延时做红外解码,比较容易理解,但是由于在主程序中使用,当存在许多中断时就可能造成误码,很多时候误码率较高,成品中则一般使用中断方式。
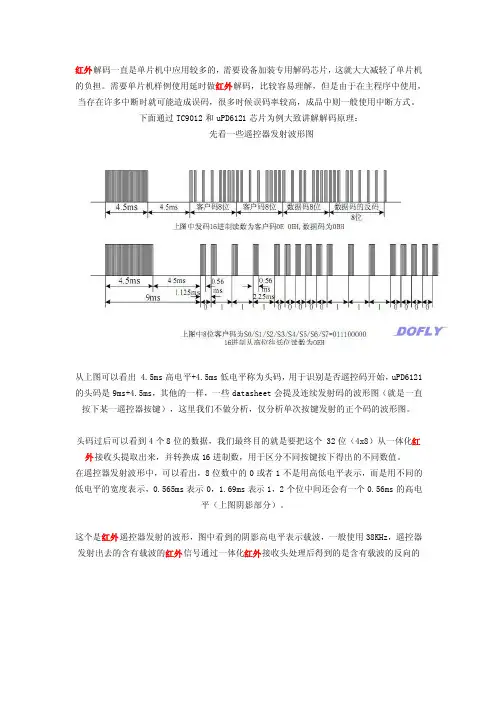
下面通过TC9012和uPD6121芯片为例大致讲解解码原理:先看一些遥控器发射波形图从上图可以看出 4.5ms高电平+4.5ms低电平称为头码,用于识别是否遥控码开始,uPD6121的头码是9ms+4.5ms,其他的一样,一些datasheet会提及连续发射码的波形图(就是一直按下某一遥控器按键),这里我们不做分析,仅分析单次按键发射的正个码的波形图。
头码过后可以看到4个8位的数据,我们最终目的就是要把这个 32位(4x8)从一体化红外接收头提取出来,并转换成16进制数,用于区分不同按键按下得出的不同数值。
在遥控器发射波形中,可以看出,8位数中的0或者1不是用高低电平表示,而是用不同的低电平的宽度表示,0.565ms表示0,1.69ms表示1,2个位中间还会有一个0.56ms的高电平(上图阴影部分)。
这个是红外遥控器发射的波形,图中看到的阴影高电平表示载波,一般使用38KHz,遥控器发射出去的含有载波的红外信号通过一体化红外接收头处理后得到的是含有载波的反向的波形,也就是没有上图中的阴影部分。
大致如下图一体化红外接收头内部集成了选频放大(38KHz左右频率增益最大),检波(把38KHz的载波滤除),放大整形(变成容易检测的矩形波)。
看到如上图波形,表示单片机引脚可以接收到的波形,我们只要通过单片机读取波形并分析波形的宽度,然后分辨出是头码,还是0或者1,最后整理出这组码的16进制组合。
正确的解码结果是按同一个按键得出的16进制数值是不变化的。
通过这个原理,我们可以分辨出每个按键的键值。
mini80/mini80e样例程序中使用的红外解码程序,应用了外部中断,平时从书上或者网络上看到的解码一般是单纯解码,整个程序不做其他工作,这种方式可以使用普通io口,用延时等待的方法判断接收到的是高电平还是低电平,从而判断码值。
//===================================================================== //// 红外遥控器解码程序演示//// 本程序主要将现在比较常用TX1300遥控器进行解码,将解码后的数据通过P2端////口的数码管显示出来,为了更好的看到运行过程,特加了三个指示灯用来指示当////前运行状态.P10主要用来闪亮,表示程序正在运行,P11则用来表示接收到数据, ////P12表示触发内部的定时器操作.P13的闪亮表示正确接收完一个数据. //// 程序运行效果: 打开本机电源开关,可以看到P10不停的闪动,按下遥控器的数////字键,数码管则显示相应的数字键(1-9).可以看到P11,P12在显示后呈亮状态.则////可以接收下一个数据,在上面过程中可以看到P13闪亮了一下.表明上次正确接收////到数据. ////---------------------------------------------------------------------//// 开发日期: 2009/01/30 研发单位:上海腾芯实业有限公司//#include <reg52.h> //包含51单片机相关的头文件#define uint unsigned int //重定义无符号整数类型#define uchar unsigned char //重定义无符号字符类型uchar code LedShowData[]={0x03,0x9F,0x25,0x0D,0x99, //定义数码管显示数据0x49,0x41,0x1F,0x01,0x19};//0,1,2,3,4,5,6,7,8,9uchar code RecvData[]={0x07,0x0A,0x1B,0x1F,0x0C,0x0D,0x0E,0x00,0x0F,0x19};uchar IRCOM[7];static unsigned int LedFlash; //定义闪动频率计数变量unsigned char RunFlag=0; //定义运行标志位bit EnableLight=0; //定义指示灯使能位/***********完成基本数据变量定义**************/sbit S1State=P1^0; //定义S1状态标志位sbit S2State=P1^1; //定义S2状态标志位sbit B1State=P1^2; //定义B1状态标志位sbit IRState=P1^3; //定义IR状态标志位sbit RunStopState=P1^4; //定义运行停止标志位sbit FontIRState=P1^5; //定义FontIR状态标志位sbit LeftIRState=P1^6; //定义LeftIR状态标志位sbit RightIRState=P1^7; //定义RightIRState状态标志位/*************完成状态指示灯定义*************/sbit S1=P3^2; //定义S1按键端口sbit S2=P3^4; //定义S2按键端口/*************完成按键端口的定义*************/sbit LeftLed=P2^0; //定义前方左侧指示灯端口sbit RightLed=P0^7; //定义前方右侧指示灯端口/*************完成前方指示灯端口定义*********/sbit LeftIR=P3^5; //定义前方左侧红外探头sbit RightIR=P3^6; //定义前主右侧红外探头sbit FontIR=P3^7; //定义正前方红外探头/*************完成红外探头端口定义***********/sbit M1A=P0^0; //定义电机1正向端口sbit M1B=P0^1; //定义电机1反向端口sbit M2A=P0^2; //定义电机2正向端口sbit M2B=P0^3; //定义电机2反向端口/*************完成电机端口定义***************/sbit B1=P0^4; //定义话筒传感器端口sbit RL1=P0^5; //定义光敏电阻端口sbit SB1=P0^6; //定义蜂鸣端口/*********完成话筒,光敏电阻,蜂鸣器.端口定义**/sbit IRIN=P3^3; //定义红外接收端口/*********完成红外接收端口的定义*************/#define ShowPort P2 //定义数码管显示端口extern void ControlCar(uchar CarType); //声明小车控制子程序void delayms(unsigned char x) //0.14mS延时程序{unsigned char i; //定义临时变量while(x--) //延时时间循环{for (i = 0; i<13; i++) {} //14mS延时}}void Delay() //定义延时子程序{ uint DelayTime=30000; //定义延时时间变量while(DelayTime--); //开始进行延时循环return; //子程序返回}void IR_IN() interrupt 2 using 0 //定义INT2外部中断函数{unsigned char j,k,N=0; //定义临时接收变量EX1 = 0; //关闭外部中断,防止再有信号到达delayms(15); //延时时间,进行红外消抖if (IRIN==1) //判断红外信号是否消失{EX1 =1; //外部中断开return; //返回}while (!IRIN) //等IR变为高电平,跳过9ms 的前导低电平信号。
红外线遥控解码原理一、引言红外线遥控解码是一种常见的电子技术应用,广泛用于电视、空调、音响等家电产品中。
通过红外线遥控解码技术,可以实现遥控器与设备之间的无线通信,方便人们对设备进行远程操控。
本文将介绍红外线遥控解码的原理和实现方式。
二、红外线遥控解码原理红外线遥控解码的原理是利用红外线信号的特点进行解码。
遥控器通过按键操作产生一系列的红外信号,这些信号被红外发射器发射出去,然后被接收器接收并解码。
下面将详细介绍红外线遥控解码的原理。
1. 红外线信号的特点红外线是一种电磁波,波长在0.75微米到1000微米之间。
在这个波长范围内,红外线具有较好的穿透性,能够穿透一些物体,比如空气、玻璃等。
同时,红外线的波长也决定了它能够被人眼所感知。
2. 红外线遥控信号的编码方式红外线遥控信号一般采用脉冲宽度编码(Pulse Width Encoding)的方式进行编码。
即通过调节红外线信号的脉冲宽度来表示不同的信息。
通常会将一个编码周期分为若干个时间单位,每个时间单位内的脉冲宽度决定了信号的状态,比如高电平表示1,低电平表示0。
3. 红外线遥控信号的解码方式红外线遥控信号的解码一般分为两个步骤:解调和解码。
解调是指将接收到的红外线信号转换为电信号,解码是指将解调后的电信号转换为对应的按键信息。
解调通常采用红外线接收头来完成,红外线接收头是一种能够感知红外线信号并将其转换为电信号的传感器。
红外线接收头内部含有一个光电二极管,当红外线信号照射到光电二极管上时,会产生一个电压信号。
通过对这个电压信号进行放大和滤波处理,可以得到解调后的电信号。
解码是将解调后的电信号转换为对应的按键信息。
解码一般采用红外线遥控解码芯片来完成,这些芯片内部包含了一系列的逻辑电路和存储器,能够根据输入的电信号解码出对应的按键信息。
不同的遥控器厂商和设备类型会使用不同的解码协议,因此解码芯片需要根据具体的解码协议来进行解码。
三、红外线遥控解码的实现方式红外线遥控解码可以通过硬件电路和软件算法两种方式来实现。
试用期小结尊敬的江苏三恒科技集团领导:您好!我叫程克辉,毕业于西北师范大学知行学院,电子信息工程专业。
在试用期的两个多月里,我在工程中心软件项目部实习工作,我很荣幸,能跟着***副总经理学习与专业相关的电子知识,收获不少!这两个多月在任总的指导下,我成功的了解、计算了:BT151可控硅、LM2940(1安恒流调节器)、LM317三端可调正稳压器集成电路、LM2674电源高效降压稳压转换器、13F-11网络隔离变压器、光耦开关、继电器、SC50462红外遥控发射模块、SM3XX0/3XX1红外接收头等电子元器件。
在任总的指导下和上面的学习我跟着任总学习“煤矿防爆显示系统”的电路设计、模块学习,也成功的用c语言成功的编写控制该系统的c程序,由于公司没有人用c对红外解码程序的编写,故在任总的悉心指导下,几经努力终于编写成功并且能稳定的通过硬件的测试。
硬件部分:1、外部12V电源转换成5V模块。
由LM2674器件实现2、外部1A恒流源模块。
由LM317和LM2940实现3、五个独立按键控制继电器模块。
由光耦开关实现4、继电器动作模块。
5、红外接收模块。
由SM3XX0/3XX1红外接收头实现6、外部的四路光端机、视频转换器、光缆传输、摄像头、画面分割器、网络视频等模块试用期的期间,由于刚来啥器件都没有,每每遇到困难的时候我就及时向***主任汇报,在张主任积极帮助下我的问题往往能很快的得到解决。
特别感谢张主任的无私支持和关怀!在红外线解码的c程序设计上,我面临着很大的困难,在学校根本就没有接触过红外线的解码,因为红外线是一种看不到摸不着的东西,且我们公司的红外线发射器用的是杭州士兰电子的器件很特殊。
它没有引导码只有16位的用户码和按键的数据码,这样写出来的c 解码程序就很容易受到外部红外线的干扰。
在程序初始化和有红外脉冲时能接收16位的0脉冲,即使解码出错也能有00H的码进入。
还好最后在我用数码管把红外线解出来的码显示出来,这样一切问题就迎刃而解了!程序能成功调试并通过硬件测试。
本文是对与以前发表的程序做个适当更改,因为在使用的过程中出现了一个问题,也就是在外部中断的处理函数里面处理欠妥。
在执行外部中断函数的时候,本意以定时器中断来代表解码超时,可实际情况是,即使解码超时,定时器产生溢出,但是程序却不能按照正常程序跳进定时器中断,执行定时中断函数,本以为是中断优先级的原因,但是在设置了定时器中断优先级为最高,也还是不能正常进入。
随后本人想到了解决办法,利用定时器0溢出标志TF0作为判断超时的依据,因为当TF0为1时,定时器向CUP申请中断,我们可以通过查询的方式,当TF0为1,则解码超时,退出解码。
此时不需要定时器中断函数,也可判断解码是否超时。
有人就说了,那我判断超时是否我可以定义变量,当变量超过一定数值时代表超时。
我想说,何必呢,本身定时器0溢出标志就是TF0,红外解码用到定时器,那不就刚好么,何必再去定义变量呢。
按照了解,通用的红外信号电平持续最长的时间是起始电平,一个9ms的低电平时间,定时器从0开始计时到溢出,如果是52单片机12M晶振速度,按照12分频,一个定时器脉冲时间是1us,溢出所需要的时间是65ms左右。
所以当定时器溢出,我们就不必等待,TF0作为停止解码的标志也只能用在这种速度比较低的单片机上,对于高速单片机,假如定时器溢出只需要2ms,那要是再使用TF0做判断,也就无意义了。
好了,废话不多说了。
注:主函数由读者自己编写,本程序只用于解码,最终得出的按键码存于变量Key_Temp 中。
本人习惯写某个器件的程序的时候,习惯创建.c和.h文件,因为这样方便移植,在新建的程序中只需添加.C文件和include .h文件就行了,很方便。
本人用芯片是STC15W4K32S4。
自己用这块芯片做有开发板,平时写程序都用它。
也可用一般的51单片机,但要注意定时器的时间和外部中断的端口。
本程序只适用NEC编码的解码,RC5编码请绕道。
以下是头文件信息:#ifndef __IR_H__#define __IR_H__sbit IR = P3^6;extern unsigned char Long_Press,Long_Press1; //长按计数,用作长按判断extern unsigned char Key_Temp; //保存按键变量void Init_IR(); //初始化红外有关参数#endif以下是.c文件:#include <STC15W.h>//也可以用reg52.h ,一般的编译器没有<STC15W.h>这个头文件,因为这是我个人添加进编译器里面的 #include "IR.h"#include "IR.h"/*******************************************************************时间计算:时间由定时器计的定时值来决定,本程序设定工作频率是24MHz,但定时器是12T模式。
单片机的红外遥控器解码原理与实现红外遥控器是我们日常生活中常见的电子设备,它通过使用红外线信号与接收器进行通信。
而在这个过程中,单片机起到了解码的重要作用。
本文将介绍单片机解码红外遥控器的原理以及实现方法。
一、红外遥控器的工作原理红外遥控器是一种使用红外线进行通信的设备,它主要由发送器和接收器两部分组成。
发送器将指令数据转换为红外脉冲信号并发送出去,接收器通过接收红外线信号并将其转换为电信号,进而解码为可识别的指令。
而单片机则负责接收并解码红外信号,将其转化为具体的操作。
二、单片机解码红外信号的原理单片机解码红外信号主要分为两个步骤:红外信号的接收和信号的解码处理。
1. 红外信号的接收单片机通过外部的红外接收器接收红外信号。
红外接收器可以通过外部电路将接收到的红外信号转换为电压信号,然后通过单片机的IO 口输入。
2. 信号的解码处理接收到的红外信号经过IO口输入后,单片机需要对信号进行解码处理。
解码的过程涉及到红外信号的标准化和解析。
对于常见的红外遥控器协议,单片机需要能够识别其编码方式,确定其协议格式。
这些协议通常包含了引导码、地址码和指令码等信息。
在解析红外信号时,单片机首先需要识别引导码。
引导码是红外信号的起始标志,通常由高、低电平组成,表示编码的开始。
单片机通过判断引导码的时间长度来确定信号的开始。
接下来,单片机需要识别地址码和指令码。
地址码是用来区分不同的红外遥控器设备,指令码则表示具体的操作指令。
单片机通过判断地址码和指令码的高、低电平时间长度来确定具体的操作。
三、单片机解码红外信号的实现方法单片机解码红外信号有多种实现方法,以下是一种简单的实现示例。
首先,需要连接红外接收器到单片机的IO口,将接收到的信号输入到单片机。
接收到的信号可以通过外部中断的方式触发单片机的中断服务程序。
然后,在中断服务程序中,单片机需要根据红外协议的规则,判断引导码、地址码和指令码的时间长度。
利用计时器或延时函数可以实现对信号时间的测量。
一文教会你红外线遥控器软件解码程序
红外线一开始发送一段13.5ms的引导码,引导码由9ms的高电平和4.5ms的低电平组成,跟着引导码是系统码,系统反码,按键码,按键反码,如果按着键不放,则遥控器则发送一段重复码,重复码由9ms的高电平,2.25ms的低电平,跟着是一个短脉冲。
#includeat89x52.h
#defineNULL0x00//数据无效
#defineRESET0X01//程序复位
#defineREQUEST0X02//请求信号
#defineACK0x03//应答信号,在接收数据后发送ACK信号表示数据接收正确,
也位请求信号的应答信号
#defineNACK0x04//应答信号,表示接收数据错误
#defineBUSY0x05//忙信号,表示正在忙
#defineFREE0x06//空闲信号,表示处于空闲状态
#defineREAD_IR0x0b//读取红外
#defineSTORE_IR0x0c//保存数据
#defineREAD_KEY0x0d//读取键值
#defineRECEIVE0Xf400//接收缓冲开始地址
#defineSEND0xfa00//发送缓冲开始地址
#defineIR0x50//红外接收缓冲开始地址
#defineHEAD0xaa//数据帧头
#defineTAIL0x55//数据帧尾
#defineSDAP1_7
#defineSCLP1_6
unsigned char xdata *buf1;//接受数据缓冲。