绝对式光电编码器的接口装置设计与应用
- 格式:pdf
- 大小:265.89 KB
- 文档页数:3
光电编码器原理及应用电路————————————————————————————————作者:————————————————————————————————日期:光电编码器原理及应用电路1.光电编码器原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
此外,为判断旋转方向,码盘还可提供相位相差90度的脉冲信号。
图1 光电编码器原理示意图根据检测原理,编码器可分为光学式、磁式、感应式和电容式。
根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1.1增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90度的脉冲信号,Z相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
1.2绝对式编码器绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。
绝对式光电编码器基本构造及特点绝对式光电编码器基本构造及特点绝对式光电编码器基本构造及特点用增量式光电编码器有可能于外界的干扰产生计数错误,并且在停电或故障停车后无法找到事故前执行部件的正确位置。
采用绝对式光电编码器可以避免上述缺点。
绝对式光电编码器的基本原理及组成部件与增量式光电编码器基本相同,也是光源、码盘、检测光栅、光电检测器件和转换电路组成。
与增量式光电编码器不同的是,绝对式光电编码器用不同的数码来分别指示每个不同的增量位置,它是一种直接输出数字量的传感器。
在它的圆形码盘上沿径向有若干同心码道,每条上透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有N 位二进制分辨率的编码器,其码盘必须有N 条码道。
绝对式光电编码器原理如图1-8 所示。
绝对式光电编码器是利用自然二进制、循环二进制、二-十进制等方式进行光电转换的。
绝对式光电编码器与增量式光电编码器不同之处在于圆盘上透光、不透光的线条图形,绝对光电编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。
它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;电源切除后位置信息不会丢失;编码器的精度取决于位数;最高运转速度比增量式光电编码器高。
绝对式光电编码器是利用自然二进制、循环二进制、二-十进制等方式进行光电转换的。
绝对式光电编码器与增量式光电编码器不同之处在于圆盘上透光、不透光的线条图形,绝对光电编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。
它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;电源切除后位置信息不会丢失;编码器的精度取决于位数;最高运转速度比增量式光电编码器高。
绝对值编码器的工作原理绝对值编码器是一种用于测量旋转或线性运动的装置,它可以提供准确的位置和方向信息。
它在许多领域中被广泛应用,比如机械工程、自动化控制、仪器仪表等。
绝对值编码器的工作原理基于光电效应和编码原理。
它通常由一个光电传感器和一个光栅盘组成。
光栅盘是一个圆盘状的透明介质,上面刻有很多等距的透明条纹,每个条纹被称为一个栅格。
光电传感器是一个能够检测光栅盘上栅格的变化的装置。
当绝对值编码器与运动物体相连时,光栅盘会随着物体的运动而旋转或移动。
光电传感器通过发射光束并接收反射的光束来检测光栅盘上栅格的变化。
当光栅盘旋转时,光电传感器会感知到光束的变化,从而产生电信号。
为了准确测量位置和方向,光栅盘上的栅格被设计成具有独特的编码方式。
常见的编码方式有二进制编码和格雷码编码。
二进制编码使用0和1两个数字来表示栅格的变化,每个栅格的变化都对应着一个特定的二进制码。
格雷码编码则是一种特殊的二进制编码,相邻的码之间只有一位不同,可以减少误差的传递。
光电传感器将检测到的光栅盘上栅格的变化转换为电信号后,会将信号传输给解码器。
解码器会根据编码方式将电信号转换为对应的位置和方向信息。
这些信息可以以数字或模拟形式输出给用户或其他控制系统。
绝对值编码器的工作原理使其具有准确测量位置和方向的能力。
相比于增量式编码器,绝对值编码器不需要参考点来确定位置,即使在断电后也能保持位置信息。
这使得绝对值编码器非常适用于需要高精度和稳定性的应用。
绝对值编码器的应用非常广泛。
在机械工程领域,它可以用于测量机械臂、机床、汽车发动机等的位置和方向。
在自动化控制系统中,它可以用于位置控制、速度控制和角度控制。
在仪器仪表领域,它可以用于测量仪器的位置和方向,如显微镜、望远镜等。
总结起来,绝对值编码器是一种基于光电效应和编码原理的装置,用于测量旋转或线性运动的位置和方向。
它通过光栅盘和光电传感器的配合工作,将光栅盘上栅格的变化转换为电信号,并通过解码器将信号转换为位置和方向信息。
高精度光电编码器的设计与应用研究光电编码器作为一种测量位置和角度的重要设备,在现代工业中得到了广泛的应用。
其主要原理是通过光电效应将物理量转化为电信号,再通过信号处理得到准确的位置或角度信息。
本文将探索高精度光电编码器的设计与应用,并研究该技术在工业领域的发展潜力。
第一节: 光电编码器的原理与分类光电编码器的原理基于光电效应,即光线照射到光电传感器上,产生电子与空穴对后,通过电路的处理,转化为电信号。
根据测量方式和应用需求的不同,光电编码器可以分为增量型和绝对型两种。
增量型光电编码器通过光电转换和信号处理,测量出物体运动的相对位移。
它适用于需要实时监测运动状态的场景,但无法恢复出绝对位置信息。
绝对型光电编码器能够准确确定物体的绝对位置或角度,无需初始化过程,并具有良好的抗干扰性。
它适用于需要准确定位和高精度控制的工业领域。
第二节: 高精度光电编码器的设计要点高精度光电编码器的设计要点关键在于提高信号的稳定性和精度。
以下是一些设计要点的概述:1. 光源和光电传感器的选择合适的光源和光电传感器选择对信号的稳定性至关重要。
光源应具有稳定的光强度和狭窄的光束角度,而光电传感器应具有高灵敏度和低噪声,以确保高质量的信号输出。
2. 信号的处理和解码算法设计高精度的光电编码器需要优化信号处理和解码算法。
有效的滤波和噪声抑制算法可以减小外界干扰对测量结果的影响,并提高信号的准确性和稳定性。
3. 机械结构的优化光电编码器的机械结构对其测量性能有重要影响。
减小机械误差和抗震动设计可以提高编码器的精度和稳定性。
此外,合适的安装方式和机械连接方式也对测量结果的准确性有重要影响。
第三节: 高精度光电编码器在工业领域的应用高精度光电编码器在工业领域有着广泛的应用。
以下是几个典型的应用案例:1. 机器人控制在工业机器人控制中,光电编码器用于测量机器人关节的角度和位置,实现对机器人运动的精确控制。
高精度的光电编码器可以提高机器人的定位精度和工作效率。
光电编码器的工作原理和应用电路1 光电编码器的工作原理光电编码器(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,因其外部有一个可以左右旋转同时又可按下的旋钮,很多设备(如显示器、示波器等)用它作为人机交互接口。
下面以美国Greyhill公司生产的光电编码器为例,介绍其工作原理及使用方法。
光电编码器的内部电路如图1所示,其内部有1个发光二极管和2个光敏三极管。
当左右旋转旋钮时,中间的遮光板会随旋钮一起转动,光敏三极管就会被遮光板有次序地遮挡,A、B相就会输出图2所示的波形;当按下旋钮时,2、3两脚接通,其用法同一般按键。
当顺时针旋转时,光电编码器的A相相位会比B相超前半个周期;反之,A相会比B相滞后半个周期。
通过检测A、B两相的相位就可以判断旋钮是顺时针还是逆时针旋转,通过记录A或B相变化的次数,就可以得出旋钮旋转的次数,通过检测2、3脚是否接通就可以判断旋钮是否按下。
其具体的鉴相规则如下:1.A为上升沿,B=0时,旋钮右旋;2.B为上升沿,A=l时,旋钮右旋;3.A为下降沿,B=1时,旋钮右旋;4.B为下降沿,A=O时,旋钮右旋;5.B为上升沿,A=0时,旋钮左旋;6.A为上升沿,B=1时,旋钮左旋;7.B为下降沿,A=l时,旋钮左旋;8.A为下降沿,B=0时,旋钮左旋。
通过上述方法,可以很简单地判断旋钮的旋转方向。
在判断时添加适当的延时程序,以消除抖动干扰。
2 WinCE提供的驱动模型WinCE操作系统支持两种类型的驱动程序。
一种为本地驱动程序,是把设备驱动程序作为独立的任务实现的,直接在顶层任务中实现硬件操作,因此都有明确和专一的目的。
本地设备驱动程序适合于那些集成到Windows CE平台的设备,诸如键盘、触摸屏、音频等设备。
另一种是具有定制接口的流接口驱动程序。
它是一般类型的设备驱动程序。
流接口驱动程序的形式为用户一级的动态链接库(DLL)文件,用来实现一组固定的函数称为“流接口函数”,这些流接口函数使得应用程序可以通过文件系统访问这些驱动程序。
编码器的设计与应用研究编码器是一种将机械位置转换为串行数字信号的设备,常用于测量和控制旋转角度或线性运动距离。
在工业自动化、机械加工等领域被广泛使用。
编码器主要分为旋转编码器和线性编码器。
旋转编码器常用于测量物体旋转的角度。
线性编码器则用于测量物体线性运动的距离。
本文将重点介绍编码器的设计与应用研究。
一、编码器的设计原理编码器大致分为两类——光学编码器和磁性编码器,其中磁性编码器又可分为霍尔编码器和电感编码器。
这些编码器都有各自的特点和优势,选用时应根据实际需要来选择。
1.光学编码器光学编码器是利用光电二极管检测刻有光栅标记的旋转盘或平移标尺的运动来测量移动的位移,并将其转化为数字信号。
应用于数控机床、机器人、医疗器械、高速包装机等领域。
光电二极管是光电阻结的一种,其特点是在光照下会产生电流。
光电二极管将光学传感器的信号转换为电信号,通过后续的逻辑电路,识别出输入信号的大小和方向,输出对应的数字信号。
2.磁性编码器磁性编码器是利用霍尔传感器或电感传感器检测磁性材料上磁场变化的方式,将动态变化的磁信号转化为数字信号。
应用于飞机、自动化机械、船舶、石油、化工等行业中。
霍尔传感器是一种基于霍尔效应的传感器,将磁信号转化为电信号,通过后续的逻辑电路,识别出输入信号的大小和方向,输出对应的数字信号。
电感传感器是通过变换电磁感应作用的信号,将磁信号转换为电信号,通过后续的逻辑电路,识别出输入信号的大小和方向,输出对应的数字信号。
这种方式可实现极高的精度。
二、编码器的应用研究编码器的应用范围非常广泛,具有重要的研究价值和实用意义。
以下列举一些常见的应用领域。
1.机器人领域机器人领域是光电编码器的主要应用领域,主要用于机器人手臂的电机控制。
编码器通过回传实时的位置数据,确保机器人系统的高精准位置控制。
在实现机器人“眼观六路,手臂旋转”的综合控制中,编码器的测量能力尤其重要。
2.医疗器械医疗器械中的编码器广泛应用于X射线机、CT扫描仪、磁共振成像仪、治疗设备等。
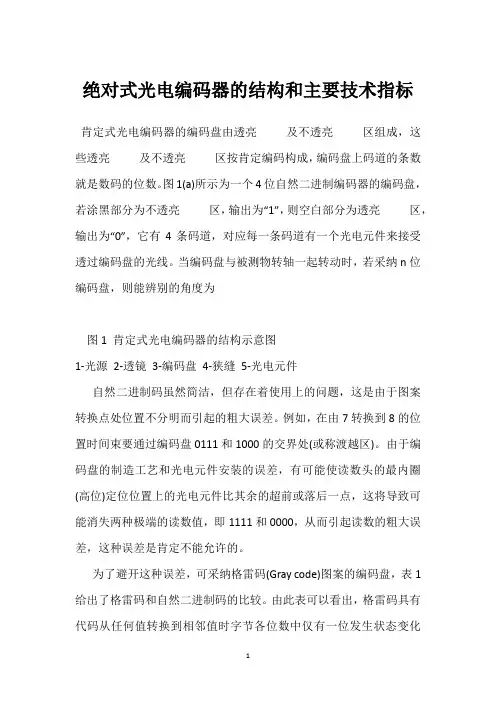
绝对式光电编码器的结构和主要技术指标肯定式光电编码器的编码盘由透亮及不透亮区组成,这些透亮及不透亮区按肯定编码构成,编码盘上码道的条数就是数码的位数。
图1(a)所示为一个4位自然二进制编码器的编码盘,若涂黑部分为不透亮区,输出为“1”,则空白部分为透亮区,输出为“0”,它有4条码道,对应每一条码道有一个光电元件来接受透过编码盘的光线。
当编码盘与被测物转轴一起转动时,若采纳n位编码盘,则能辨别的角度为图1 肯定式光电编码器的结构示意图1-光源2-透镜3-编码盘4-狭缝5-光电元件自然二进制码虽然简洁,但存在着使用上的问题,这是由于图案转换点处位置不分明而引起的粗大误差。
例如,在由7转换到8的位置时间束要通过编码盘0111和1000的交界处(或称渡越区)。
由于编码盘的制造工艺和光电元件安装的误差,有可能使读数头的最内圈(高位)定位位置上的光电元件比其余的超前或落后一点,这将导致可能消失两种极端的读数值,即1111和0000,从而引起读数的粗大误差,这种误差是肯定不能允许的。
为了避开这种误差,可采纳格雷码(Gray code)图案的编码盘,表1给出了格雷码和自然二进制码的比较。
由此表可以看出,格雷码具有代码从任何值转换到相邻值时字节各位数中仅有一位发生状态变化的特点。
而自然二进制码则不同,代码常常有2-3位甚至4位数值同时变化的状况。
这样,采纳格雷码的方法即使发生前述的错移,由于它在进位时相邻界面图案的转换仅仅发生一个最小量化单位(最小辨别率)的转变,因而不会产生粗大误差。
这种编码方法称作单位距离性码,是有用中常采纳的方法。
表1 自然二进制码和格雷码的比较肯定式光电编码器对应每一条码道有一个光电元件,当码道处于不同角度时,经光电转换的输出就呈现出不同的数码。
它的优点是没有触点磨损,因而允许转速高,最外层缝隙宽度可做得更小,所以精度也很高,其缺点是结构简单,价格高,光源寿命短。
国内已有14位编码器的定型产品。
绝对式光电编码器基本构造及特点
绝对式光电编码器的基本构造包括光源、反射板、测量元件和读取电路。
光源通常是一种LED,用于照射在反射板上。
反射板具有一系列的刻线,这些刻线用于反射光束。
测量元件通常是一种光电二极管阵列,用于
接收反射的光束。
读取电路则用于将测量元件接收到的信号转换为旋转位
置的数字表示。
1.高精度:绝对式光电编码器具有高分辨率和高重复性,能够实现精
确的旋转位置测量。
它可以提供高度精确的位置控制和定位。
2.高分辨率:绝对式光电编码器可以提供非常高的分辨率,能够实现
微小旋转角度的测量。
这使得它在需要高精度测量的应用中非常有用。
3.宽动态范围:绝对式光电编码器能够测量广泛的旋转速度和加速度。
它具有良好的动态响应特性,能够快速准确地测量旋转位置。
4.高速测量:绝对式光电编码器具有快速的测量速度和响应时间。
它
可以快速准确地测量旋转位置并输出结果。
5.无接触测量:绝对式光电编码器采用非接触式测量原理,可以减少
磨损和使用寿命,并能够在恶劣的环境条件下进行可靠的测量。
6.抗干扰性:绝对式光电编码器具有较好的抗干扰性能,能够在电磁
干扰等复杂环境条件下正常工作。
7.易于安装和使用:绝对式光电编码器的安装和使用非常简单便捷。
它通常具有标准接口和易于理解的输出信号,可以方便地与其他设备和系
统集成。
总之,绝对式光电编码器是一种高精度和高分辨率的旋转位置测量装置,具有高速测量、无接触测量、抗干扰性强等特点。
它在自动化控制、机器人、医疗设备、航天航空和精密加工等领域被广泛应用。
绝对式光电编码器的构造和主要技术指标绝对式光电编码器是一种主要用于测量和定位系统的装置,其能够将位置信息以数字的形式输出。
相对于增量式光电编码器而言,绝对式光电编码器具有独立于起始位置的优势,不需要参考点或者重新校准就能够确定当前位置。
绝对式光电编码器的构造主要包括光源、光电二极管、编码轮和电路板等部分。
光源产生可见光或红外光,照射在编码轮上;光电二极管装在编码轮的另一侧,用于接受光束的变化;编码轮有一个或多个光学格栅,栅内有透光和反光的区域;电路板用于接收光电二极管的信号,并将其转化为数字输出。
在工作时,光源照射在编码轮上,光通过透光和反光的区域后,被光电二极管接收。
光电二极管接收到的光信号经过放大和处理后,转化为数字信号。
通过解码器,可以将数字信号转化为对应的位置信息。
分辨率是指编码器能够解析的最小位移量的大小,通常以线数或密度来表示。
分辨率越高,能够识别的位置越精确。
准确性是指编码器输出的位置信息与实际位置之间的误差。
准确性越高,编码器的测量结果越接近实际位置。
重复性是指编码器在相同条件下反复测量同一位置时输出的结果的一致性。
重复性好的编码器可以提供稳定和可靠的测量结果。
响应时间是指编码器从接收到光信号到输出位置信息所需要的时间。
响应时间短的编码器可以快速地进行测量和定位。
此外,绝对式光电编码器的耐用性、工作温度范围、耐震性、防尘防水性等也是需要考虑的技术指标。
综上所述,绝对式光电编码器通过光源、光电二极管、编码轮和电路板等构造,能够将位置信息以数字的形式输出。
其主要技术指标包括分辨率、准确性、重复性和响应时间等,这些指标都对编码器的性能和应用起到重要影响。
光电编码器的工作原理及安装注意事项《光电编码器的工作原理及安装注意事项》1. 引言你有没有想过,在很多自动化设备里,是怎么精确地知道某个部件转了多少圈或者移动了多少距离呢?今天,咱们就来深入了解一下光电编码器这个神奇的小装置,搞清楚它的工作原理以及在安装的时候需要注意些什么。
这篇文章呀,咱们会先从光电编码器的基本概念说起,再聊聊它是怎么工作的,接着看看它在生活和工业中的应用,还有一些常见的问题和误解,最后再补充点相关的趣味知识,让你全方位地认识光电编码器。
2. 核心原理2.1基本概念与理论背景光电编码器呢,说白了就是一种能够把机械的运动转化成电信号的装置。
它的基础理论涉及到光学和电学的知识。
从发展历程来看,随着自动化技术的不断发展,对精确测量位置和速度的需求越来越高,光电编码器就应运而生了。
它的核心概念就是利用光电转换来实现测量。
就好比一个翻译,把机械运动这个“语言”翻译成电信号这个“语言”,这样机器就能读懂了。
2.2运行机制与过程分析光电编码器的工作过程可以简单地分成几个步骤。
首先,它有一个码盘,这个码盘上有很多透光和不透光的区域,就像黑白相间的条纹一样。
当码盘转动的时候,有一束光会照射到码盘上。
如果是透光的区域,光线就能通过,照射到后面的光电元件上;如果是不透光的区域,光线就被挡住了。
比如说,这就像用手电筒照有孔和没孔的板子,有孔的地方光就能透过去。
光电元件接收到光线或者没接收到光线就会产生不同的电信号。
然后,这些电信号会被处理,根据码盘上的编码方式,就能确定码盘转动的角度或者位置了。
这就好比通过解读不同的电信号密码,知道码盘转了多少。
3. 理论与实际应用3.1日常生活中的实际应用在日常生活中,光电编码器的应用还真不少呢。
就拿我们常见的电梯来说吧,光电编码器能够精确地测量电梯轿厢的位置,这样电梯就能准确地停在每一层楼。
还有我们家里的洗衣机,它在脱水的时候,光电编码器可以监测电机的转速,从而控制脱水的速度和时间。
绝对值编码器的工作原理绝对值编码器是一种用于测量旋转角度或线性位移的装置,它能够提供准确和可靠的位置反馈。
本文将详细介绍绝对值编码器的工作原理及其应用。
一、绝对值编码器的基本原理绝对值编码器是基于光电效应的原理工作的。
它由一个光源、编码盘、光电传感器和信号处理电路组成。
1. 光源:光源通常是一个发光二极管(LED),它发出的光经过透镜聚焦后照射到编码盘上。
2. 编码盘:编码盘是一个圆盘状的装置,上面刻有一系列的刻线。
这些刻线通常是等间距的,可以分为黑白相间或具有特定编码规律的刻线。
3. 光电传感器:光电传感器通常是由光电二极管和光敏二极管组成的。
当光线照射到光敏二极管上时,会产生电流。
4. 信号处理电路:信号处理电路用于接收光电传感器产生的电流信号,并将其转换为数字信号输出。
二、绝对值编码器的工作过程绝对值编码器的工作过程可以分为光电信号的读取和信号处理两个阶段。
1. 光电信号的读取:当编码盘旋转或移动时,光源照射到编码盘上的刻线上。
根据刻线的不同,光线在光电传感器上产生不同的反射或透射。
这些反射或透射光线经光电传感器接收后,产生相应的电流信号。
2. 信号处理:光电传感器产生的电流信号经过信号处理电路进行放大、滤波和数字化处理。
信号处理电路将电流信号转换为数字信号,并将其与预设的编码规则进行匹配,从而确定当前的位置信息。
三、绝对值编码器的应用领域绝对值编码器广泛应用于精密测量和控制系统中,常见的应用领域包括:1. 机床和自动化设备:绝对值编码器可用于测量机床的刀具位置、工件位置和工作台位置,以实现精确的加工和定位控制。
2. 机器人和自动导航系统:绝对值编码器可用于测量机器人关节的角度和末端执行器的位置,以实现精确的运动控制和路径规划。
3. 医疗设备:绝对值编码器可用于测量医疗设备中的运动部件的位置,如手术机器人的机械臂和放射治疗设备的治疗头部。
4. 线性位移测量:绝对值编码器可用于测量线性位移,如液压缸的伸缩长度、线性导轨的位置等。
绝对式光电编码器是一种用于测量物体运动或位置的装置,它采用光电传感器来读取旋转或线性位移时的位置信息。
它与传统的增量式光电编码器相比,具有更高的精度和稳定性,能够准确地读取绝对位置信息,而不需要进行回原点操作。
绝对式光电编码器的工作原理主要基于光电传感器和编码盘之间的相互作用。
在编码盘上,划分为等量的格点,在光电传感器的作用下,能够准确地读取出每个格点的位置信息。
当物体运动或位置发生变化时,光电传感器会不断地读取编码盘上的位置信息,从而实现对物体位置的准确测量。
在绝对式光电编码器中,还有一组特殊的编码码盘,被称为灰码盘。
这种编码盘能够准确地表示物体的绝对位置,无论它是处于静止状态还是运动状态。
这就意味着,即使系统断电或重新启动,绝对式光电编码器也能够立即恢复并准确地测量出物体的位置,而不需要重新初始化。
绝对式光电编码器的工作原理基于光电传感器对编码盘上位置信息的读取和识别,以及灰码盘对绝对位置的准确表示。
通过这种工作原理,绝对式光电编码器能够实现对物体位置的高精度和稳定性测量,成为工业自动化和机器人领域中不可或缺的重要装置。
总结来说,绝对式光电编码器通过光电传感器和编码盘的相互作用,以及灰码盘的绝对位置表示,实现了对物体位置的准确测量。
它的工作原理基于高精度的读取和识别技术,能够在工业自动化和机器人领域中发挥重要作用。
关于绝对式光电编码器的个人理解,我认为它的工作原理非常精密和高效。
它不仅能够准确地测量物体的位置,而且还能实现对物体位置的绝对表示,这种特性在许多领域都具有重要意义。
在未来的发展中,我相信绝对式光电编码器会继续发挥重要作用,并不断提升精度和稳定性,以满足不断变化的应用需求。
通过对绝对式光电编码器工作原理的深入探讨,我对这一主题有了更加深刻的理解。
我相信,在文章中多次提及了绝对式光电编码器的工作原理,有助于我全面、深刻和灵活地理解这个主题。
在文章的总结和回顾性内容中,我也得到了对这一主题的全面总结和回顾,这为我今后进一步学习和探索相关内容提供了很好的基础。
一种绝对值编码器接口电路及控制方法
本发明涉及一种绝对值编码器接口电路及控制方法,具体技术方案如下:
一、技术方案
本发明提供了一种绝对值编码器接口电路及控制方法,包括:(1)绝对值编码器的接口电路,由编码器的接口总线连接编码器,接口总线包括编码器的输入信号SCL、MOSI和CLK,编码器的输出信号MISO和中断信号INT,其中,MOSI信号上升沿信号控制编码器开始读取编码值,MISO为编码器输出编码值,SCL、CLK信号上升沿控制编码器读取编码值的步骤和字节结构;
(2)绝对值编码器的控制方法,包括:
步骤a:控制MOSI信号上升沿,控制编码器开始读取编码值;
步骤b:控制SCL、CLK信号上升沿,控制编码器读取编码值的步骤和字节结构;
步骤c:锁存编码器输出的编码值;
步骤d:控制MOSI信号下降沿,控制编码器停止读取编码值。
二、有益效果
本发明能够有效地降低绝对值编码器读取的时延,增加绝对值编码器的精确度,增强了系统的可靠性,并且可以满足实际的需求。
基于FPGA的绝对式光电编码器接口设计
彭雨;赵云;雷力
【期刊名称】《伺服控制》
【年(卷),期】2008(000)008
【摘要】绝对式光电编码器精度高、位数多的特点决定其通信方式只能采取串行传输方式,且由相应的通信协议控制信息的传输。
本文针对编码器主要生产厂商日本多摩川公司的绝对式光电编码器,采用FPGA设计可用于伺服驱动系统中的接口电路。
【总页数】3页(P51-53)
【作者】彭雨;赵云;雷力
【作者单位】华中科技大学自动化所;武汉华中数控股份有限公司
【正文语种】中文
【中图分类】TP211.6
【相关文献】
1.基于FPGA的RCN223绝对式编码器通讯接口设计 [J], 夏加宽;李晓帆
2.基于TMS320F2808的高精度绝对式光电编码器串行接口设计 [J], 礼冰冰;杨明;贵献国;徐殿国
3.基于FPGA的RCN223绝对式编码器通讯接口设计 [J], 夏加宽;李晓帆
4.基于DSP的绝对式光电编码器串行接口设计 [J], 张琴琴;杨建宏;刘琳
5.基于FPGA和绝对式长度计的EnDat2.2通信接口设计 [J], 刘塔拉;贾建禄;吴庆林;
因版权原因,仅展示原文概要,查看原文内容请购买。