习题解答_现控理论_第6章
- 格式:doc
- 大小:325.45 KB
- 文档页数:9
第6章单片机串行通信系统习题解答一、填空题1.在串行通信中,把每秒中传送的二进制数的位数叫波特率。
2.当SCON中的M0M1=10时,表示串口工作于方式 2 ,波特率为 fosc/32或fosc/64 。
3.SCON中的REN=1表示允许接收。
4.PCON 中的SMOD=1表示波特率翻倍。
5.SCON中的TI=1表示串行口发送中断请求。
6.MCS-51单片机串行通信时,先发送低位,后发送高位。
7.MCS-51单片机方式2串行通信时,一帧信息位数为 11 位。
8.设T1工作于定时方式2,作波特率发生器,时钟频率为11.0592MHz,SMOD=0,波特率为2.4K时,T1的初值为 FAH 。
9.MCS-51单片机串行通信时,通常用指令 MOV SBUF,A 启动串行发送。
10.MCS-51单片机串行方式0通信时,数据从 P3.0 引脚发送/接收。
二、简答题1.串行口设有几个控制寄存器?它们的作用是什么?答:串行口设有2个控制寄存器,串行控制寄存器SCON和电源控制寄存器PCON。
其中PCON 中只有PCON.7的SMOD与串行口的波特率有关。
在SCON中各位的作用见下表:2.MCS-51单片机串行口有几种工作方式?各自的特点是什么?答:有4种工作方式。
各自的特点为:3.MCS-51单片机串行口各种工作方式的波特率如何设置,怎样计算定时器的初值? 答:串行口各种工作方式的波特率设置:工作方式O :波特率固定不变,它与系统的振荡频率fosc 的大小有关,其值为fosc/12。
工作方式1和方式3:波特率是可变的,波特率=(2SMOD/32)×定时器T1的溢出率 工作方式2:波特率有两种固定值。
当SM0D=1时,波特率=(2SM0D/64)×fosc=fosc/32当SM0D=0时,波特率=(2SM0D/64)×fosc=fosc/64计算定时器的初值计算:4.若fosc = 6MHz ,波特率为2400波特,设SMOD =1,则定时/计数器T1的计数初值为多少?并进行初始化编程。
第一章 绪论1-1 试比较开环控制系统和闭环控制系统的优缺点.解答:1开环系统(1) 优点:结构简单,成本低,工作稳定。
用于系统输入信号及扰动作用能预先知道时,可得到满意的效果。
(2) 缺点:不能自动调节被控量的偏差。
因此系统元器件参数变化,外来未知扰动存在时,控制精度差。
2 闭环系统⑴优点:不管由于干扰或由于系统本身结构参数变化所引起的被控量偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高。
它是一种按偏差调节的控制系统。
在实际中应用广泛。
⑵缺点:主要缺点是被控量可能出现波动,严重时系统无法工作。
1-2 什么叫反馈?为什么闭环控制系统常采用负反馈?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反馈。
闭环控制系统常采用负反馈。
由1-1中的描述的闭环系统的优点所证明。
例如,一个温度控制系统通过热电阻(或热电偶)检测出当前炉子的温度,再与温度值相比较,去控制加热系统,以达到设定值。
1-3 试判断下列微分方程所描述的系统属于何种类型(线性,非线性,定常,时变)?(1)22()()()234()56()d y t dy t du t y t u t dt dt dt ++=+(2)()2()y t u t =+(3)()()2()4()dy t du t ty t u t dt dt +=+ (4)()2()()sin dy t y t u t tdt ω+=(5)22()()()2()3()d y t dy t y t y t u t dt dt ++= (6)2()()2()dy t y t u t dt +=(7)()()2()35()du t y t u t u t dt dt =++⎰解答: (1)线性定常 (2)非线性定常 (3)线性时变 (4)线性时变 (5)非线性定常 (6)非线性定常 (7)线性定常1-4 如图1-4是水位自动控制系统的示意图,图中Q1,Q2分别为进水流量和出水流量。
第六章 相关与回归分析思考与练习一、判断题1.产品的单位成本随着产量增加而下降,这种现象属于函数关系。
答:错。
应是相关关系。
单位成本与产量间不存在确定的数值对应关系。
2.相关系数为0表明两个变量之间不存在任何关系。
答:.错。
相关系数为零,只表明两个变量之间不存在线性关系,并不意味着两者间不存在其他类型的关系。
3.单纯依靠相关与回归分析,无法判断事物之间存在的因果关系。
答:对,因果关系的判断还有赖于实质性科学的理论分析。
4.圆的直径越大,其周长也越大,两者之间的关系属于正相关关系。
答:错。
两者是精确的函数关系。
5.总体回归函数中的回归系数是常数,样本回归函数中的回归系数的估计量是随机变量。
答:对。
6.当抽取的样本不同时,对同一总体回归模型估计的结果也有所不同。
答:对。
因为,估计量属于随机变量,抽取的样本不同,具体的观察值也不同,尽管使用的公式相同,估计的结果仍然不一样。
二、选择题1.变量之间的关系按相关程度分可分为:b 、c 、da.正相关;b. 不相关;c. 完全相关;d.不完全相关; 2.复相关系数的取值区间为:aa. 10≤≤R ;b.11≤≤-R ;c.1≤≤∞-R ;d.∞≤≤-R 1 3.修正自由度的决定系数a 、b 、da.22R R ≤; b.有时小于0 ; c. 102≤≤R ;d.比2R 更适合作为衡量回归方程拟合程度的指标 4.回归预测误差的大小与下列因素有关:a 、b 、c 、da 样本容量;b 自变量预测值与自变量样本平均数的离差c 自变量预测误差;d 随机误差项的方差三、问答题1.请举一实例说明什么是单相关和偏相关?以及它们之间的差别。
答:例如夏季冷饮店冰激凌与汽水的消费量,简单地就两者之间的相关关系进行考察,就是一种单相关,考察的结果很可能存在正相关关系,即冰激凌消费越多,汽水消费也越多。
然而,如果我们仔细观察,可以发现一般来说,消费者会在两者中选择一种消费,也就是两者之间事实上应该是负相关。
第6章完全垄断市场下的价格与产量课后习题参考答案一、单选题1.对完全垄断厂商来说(C)。
A.提高价格一定能够增加收益B.降低价格一定会减少收益C.提高价格未必能增加收益,降低价格未必减少收益D.以上都不对解析:完全垄断市场上,厂商的总收益TR曲线是先增加后减少。
因此,对完全垄断厂商来说,提高价格未必能增加收益,降低价格未必减少收益。
选C。
2.垄断厂商利润极大时,(C)。
A.P=MR=MCB.P>MR=ACC.P>MR=MCD.P>MC=AC解析:垄断厂商定价时遵循利润最大化原则,此时有边际收益等于边际成本MR=MC,而当垄断厂商利润极大时,价格P显然高于边际成本MC。
3.垄断利润或者说超额利润(A)。
A.不是一种成本,因为它不代表生产中使用的资源所体现的替换成本B.不能为垄断者在长期中所获取,因为价格在最优产出水平上必须等于长期平均成本C.为保证资本继续进入该行业所必需D.能为完全竞争者和垄断者一样在长期中获取解析:BCD选项均有明显错误。
垄断利润或者说超额利润不是一种成本,选A。
4.在短期,完全垄断厂商(D)。
A.无盈余B.取得最大利润C.发生亏损D.以上任何一种情况都有可能出现解析:完全垄断厂商在短期均衡点上可能获得超额利润,可能只获得正常利润,还可能发生亏损。
因此选D。
5.在完全垄断厂商的最好或最优产量处(D)。
A.P=MCB.P=SAC的最低点的值C.P最高D.MR=MC解析:根据利润最大化原则,边际收益等于边际成本MR=MC时的价格和产量是最优的。
因此选D。
二、简答题1.成为垄断者的厂商可以任意定价,这种说法对吗?这种说法不正确。
从理论上讲,垄断者是价格的制定者,其产品没有替代品,其他厂商无法进入垄断行业,厂商是产品唯一的卖者。
然而在实际上,如果垄断厂商定价过高,购买量就会下降,从而使总收益和利润下降;其他厂商如看到有丰厚的利润,尽管没有替代品,但相似的替代品总是会生产的,因而垄断厂商如果定价过高,会使自己产品失去销路,市场被相似替代品夺去;国家也会对垄断厂商的定价加以控制,有些国家会通过制定反垄断法,规定最高限价,还可用征税等办法加以控制。
《现代控制理论》第6章习题解答6.1 分析开环状态估计方案的误差动态特性。
(说明开环形式的观测器其误差的衰减是不变的,而闭环形式的观测器其误差的衰减是可以改变的)。
答:针对线性时不变系统x Ax Buy Cx=+⎧⎨=⎩ (1) 开环形式的观测器:x Ax Bu =+误差动态方程为e x x Ae =-=其初始误差(0)e 的时间响应为()(0)At e t e e =误差的衰减是由系统模型的状态矩阵决定的,无法改变。
(2) 闭环形式的观测器:()()x Ax Bu L y Cx A LC x Bu Ly =++-=-++误差动态方程为()()e x x Ax Bu A LC x Bu Ly A LC e =-=+----=-其初始误差(0)e 的时间响应为()()(0)A LC t e t e e -=误差的衰减由A LC -决定,其中A 、C 由系统模型确定,而观测器增益矩阵L 由设计者决定,所以误差的衰减是可以改变的。
6.2 为什么要构建状态观测器?画出全维状态观测器的系统结构图。
写出状态观测器的状态方程。
答: 构建状态观测器的原因:(1)在许多实际系统中,系统的状态变量并非都是物理量,从而这些状态变量未必都可以直接测量得到。
(2)即使状态变量是物理量,可以通过传感器测量得到,但要直接测量所有的信号一方面会造成系统成本的提高,另一方面,大量传感器的引入会使系统可靠性降低。
状态观测器的模型为()()x Ax Bu L y y A LC x Bu Ly=++-=-++其中,x 是观测器的n 维状态,L 是一个n p ⨯维的待定矩阵。
全维状态观测器的系统结构图为:+-y x6.3 存在龙伯格状态观测器的条件是什么?龙伯格状态观测器中的增益矩阵L 的行数和列数怎样确定?答:存在龙伯格状态观测器的条件是:系统是状态能观的。
龙伯格状态观测器中的增益矩阵L 的行数和列数分别等于状态变量和输出量的个数。
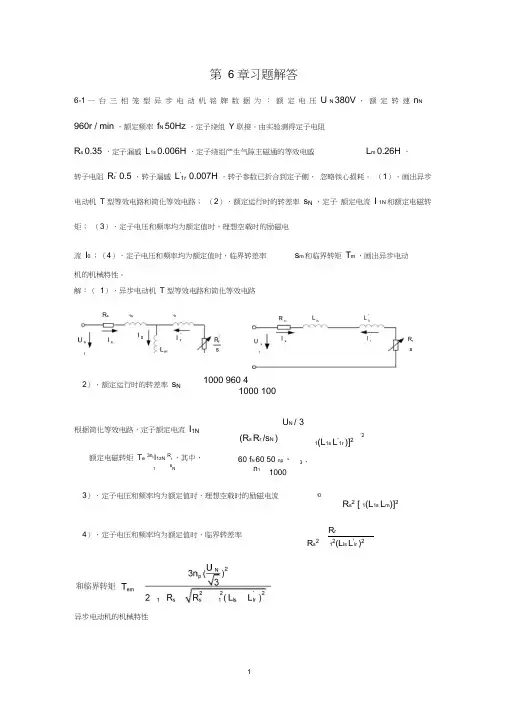
第 6 章习题解答6-1 一台三相笼型异步电动机铭牌数据为:额定电压U N 380V ,额定转速n N 960r / min ,额定频率f N 50Hz ,定子绕组Y 联接。
由实验测得定子电阻R s 0.35 ,定子漏感L1s 0.006H ,定子绕组产生气隙主磁通的等效电感L m 0.26H ,转子电阻R r' 0.5 ,转子漏感L'1r0.007H ,转子参数已折合到定子侧,忽略铁心损耗。
(1).画出异步电动机T 型等效电路和简化等效电路;(2).额定运行时的转差率s N,定子额定电流I 1N和额定电磁转矩;(3).定子电压和频率均为额定值时,理想空载时的励磁电流I0 ;(4).定子电压和频率均为额定值时,临界转差率s m和临界转矩T m ,画出异步电动机的机械特性。
解:(1).异步电动机T 型等效电路和简化等效电路2).额定运行时的转差率s N 1000 960 41000 100根据简化等效电路,定子额定电流I1NU N / 3(R s R r /s N ) '21(L1s L'1r )]2额定电磁转矩T e3n p I12N R r ,其中,1 sN60 f N 60 50 np Nn1 10003,3).定子电压和频率均为额定值时,理想空载时的励磁电流I0R s2 [ 1(L1s L m)]24).定子电压和频率均为额定值时,临界转差率R rR s212(L ls L'lr )2R s L ls L lr1 R r' s异步电动机的机械特性s n气隙磁通ΦmU N23 4.44f1N s k N S气隙磁通Φm3 3U N4.44f1N s k N S 01e6-2 异步电动机参数如6-112题所示,画出调压调速在U N 和U N 时的机械特性,计算临界23转差率s m和临界转矩T m ,分析气隙磁通的变化,在额定电流下的电磁转矩,分析在恒转矩负载和风机类负载两种情况下,调压调速的稳定运行范围。
第6章 习题解答6-1 指出下列各类型的触发器中那些能组成移位寄存器,哪些不能组成移位寄存器,如果能够,在()内打√,否则打×。
(1)基本RS 触发器 ( ); (2)同步RS 触发器 ( ); (3)主从结构触发器 ( ); (4)维持阻塞触发器 ( );(5)用CMOS 传输门的边沿触发器 ( );(6)利用传输延迟时间的边沿触发器( )。
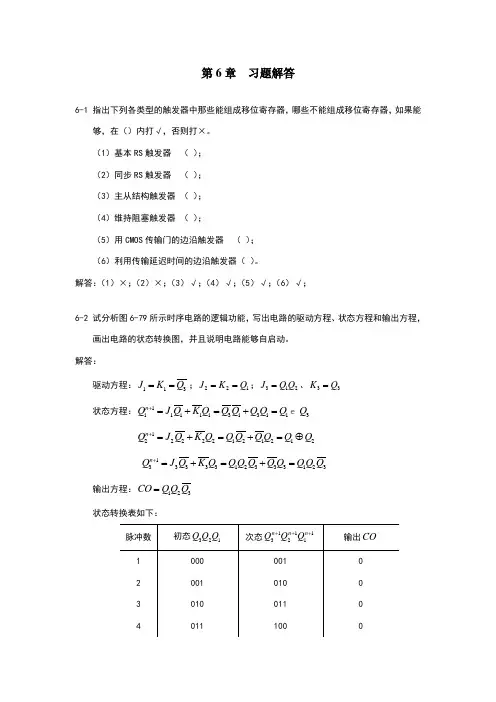
解答:(1)×;(2)×;(3)√;(4)√;(5)√;(6)√;6-2 试分析图6-79所示时序电路的逻辑功能,写出电路的驱动方程、状态方程和输出方程,画出电路的状态转换图,并且说明电路能够自启动。
解答: 驱动方程:113J K Q ==;221J K Q ==;312J Q Q =、33K Q = 状态方程:111111313113n Q J Q K Q Q Q Q Q Q Q +=+=+=e 122222121212n Q J Q K Q Q Q QQ Q Q +=+=+=⊕13333312333123n Q J Q K Q QQ Q Q Q QQ Q +=+=+=输出方程:123CO QQ Q =状态转换表如下:5 100 000 1 101 011 1 110 010 11110011状态转换图如下:此电路为能自启动的同步五进制加法计数器。
6-3 试分析图6-80所示时序电路的逻辑功能,写出电路的驱动方程、状态方程和输出方程,画出电路的状态转换图。
A 为输入逻辑变量。
解答: 驱动方程:12D AQ =;21212()D AQ Q A Q Q ==+ 状态方程:1112n Q D AQ +==12212()n Q D A Q Q +==+输出方程:12CO AQQ = 状态转换表如下:脉冲数 A 初态21Q Q次态1121n n Q Q ++输出CO1 0 00 00 02 0 01 00 03 0 10 00 04 0 11 00 0100011 01 11 0 1 11 10 1110101状态转换图如下:此电路为串行数据检测器,当输入4个或4个以上的1时输出为1,其他输入情况下输出为0。
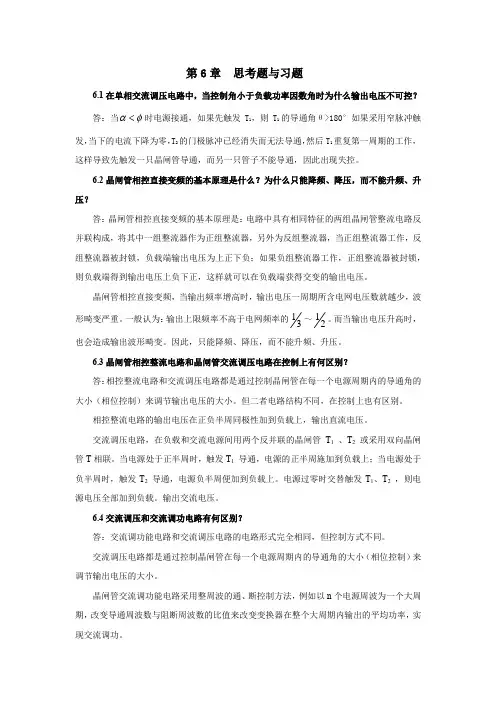
第6章思考题与习题6.1在单相交流调压电路中,当控制角小于负载功率因数角时为什么输出电压不可控?α<时电源接通,如果先触发T1,则T1的导通角θ>180°如果采用窄脉冲触答:当φ发,当下的电流下降为零,T2的门极脉冲已经消失而无法导通,然后T1重复第一周期的工作,这样导致先触发一只晶闸管导通,而另一只管子不能导通,因此出现失控。
6.2晶闸管相控直接变频的基本原理是什么?为什么只能降频、降压,而不能升频、升压?答:晶闸管相控直接变频的基本原理是:电路中具有相同特征的两组晶闸管整流电路反并联构成,将其中一组整流器作为正组整流器,另外为反组整流器,当正组整流器工作,反组整流器被封锁,负载端输出电压为上正下负;如果负组整流器工作,正组整流器被封锁,则负载端得到输出电压上负下正,这样就可以在负载端获得交变的输出电压。
晶闸管相控直接变频,当输出频率增高时,输出电压一周期所含电网电压数就越少,波形畸变严重。
一般认为:输出上限频率不高于电网频率的31~21。
而当输出电压升高时,也会造成输出波形畸变。
因此,只能降频、降压,而不能升频、升压。
6.3晶闸管相控整流电路和晶闸管交流调压电路在控制上有何区别?答:相控整流电路和交流调压电路都是通过控制晶闸管在每一个电源周期内的导通角的大小(相位控制)来调节输出电压的大小。
但二者电路结构不同,在控制上也有区别。
相控整流电路的输出电压在正负半周同极性加到负载上,输出直流电压。
交流调压电路,在负载和交流电源间用两个反并联的晶闸管T1、T2或采用双向晶闸管T相联。
当电源处于正半周时,触发T1导通,电源的正半周施加到负载上;当电源处于负半周时,触发T2导通,电源负半周便加到负载上。
电源过零时交替触发T1、T2,则电源电压全部加到负载。
输出交流电压。
6.4交流调压和交流调功电路有何区别?答:交流调功能电路和交流调压电路的电路形式完全相同,但控制方式不同。
交流调压电路都是通过控制晶闸管在每一个电源周期内的导通角的大小(相位控制)来调节输出电压的大小。
第6章 习题及参考解答6-9 已知单位负反馈控制系统校正前对数幅频特性)(0ωL 如图6-63中点画线所示,串联校正装置对数幅频特)(c ωL 如图6-63中实线所示,要求1)作出校正后系统开环对数幅频渐进特性)(ωL 。
2)比较校正前、后的开环对数幅频特性)(0ωL 和)(ωL ,说明校正装置的作用。
习题 6-9 参考解答:1)校正后系统开环对数幅频渐进特性)(ωL 是)(0ωL 和)(c ωL 的线性叠加,如图右上图中红色实线所示。
2)校正装置的传递函数为2(1)()101c s G s s +=+,为滞后校正装置。
它的作用:①抬高了低频段幅值,可提高速度输入的稳态精度;②固有特性以-40dB/dec 穿越0dB 线,校正后的Bode 图以-20dB/dec 穿越0dB 线,中频段变缓,平稳性变好;校正后系统Bode 图的高频段幅值降低了,抗干扰能力提高;校正后系统的开环截止频率减小了,滞后校正是靠牺牲系统的快速性来换取平稳性的。
6-10 图6-64为三种校正装置的对数渐近幅频特性,它们都是由最小相位环节组成。
系统为单位负反馈 系统,其开环传递函数为02400()(0.011)G s s s =+试问: 1)这些校正网络特性中,哪一种使已校正系统的稳定性最好?2)为了将12Hz 的正弦噪声削弱10倍左右,你确定采用哪种校正网络特性?习题 6-10 参考解答: 校正装置传递函数分别是12310.110.510.51(),(),().1010.0111010.0251c c c s s s s G s G s G s s s s s ++++===++++。
1)a )使用滞后校正网络,校正后021400()(0.011)1().101c G G s s s s s s =+++10()()1c G j G j ωω==L (图6-63 题6-9图图6-64 题6-10图102400()()1110180arctan 6.32180arctan 0.01 6.32arctan16.3211.7063.2cc c co oo c G j G j ωωωωωγω⨯=⇒⨯⨯≈=-=+--⨯-⨯=b )使用超前校正网络,校正后022400()(0.011)0.11().0.011c G G s s s s s s =+++10()()1c G j G j ωω==1024000.1()()11180arctan 0.140180arctan 0.0140arctan 04032.4.0140c occ c o o G j G j ωγωωωω⨯=⇒⨯=+⨯---⨯==⨯≈c )使用滞后-超前校正网络,校正后0223400()(0.011)(0.51)().(101)(0.0251)c G G s s s s s s s =++++2230224000.5()()11011180(arctan 0.510)180arctan 1041010arctan 0.02510arctan 0.01108.2cc c c o o c oG j G j ωγωωωωω⨯=⇒⨯⨯⨯=+⨯--⨯-⨯-⨯=≈=由上述结果可知,在这些校正网络特性中,滞后-超前校正网络,其相角裕量γ=48o 最大,所以滞后-超前网络使已校正系统的稳定性最好。
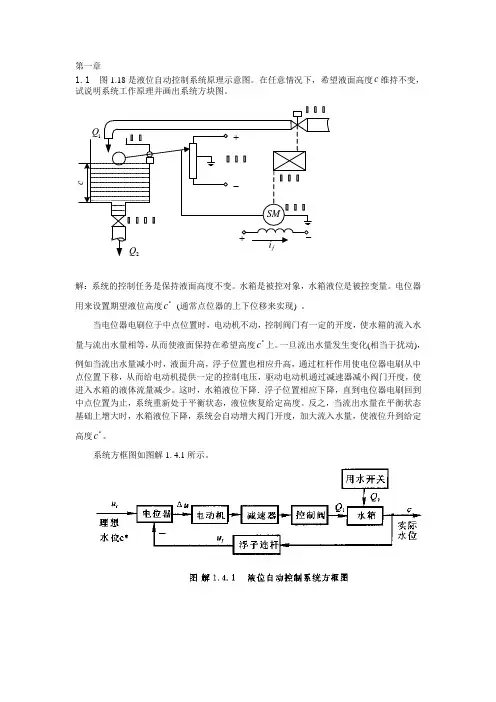
第一章1. 1图1・18是液位自动控制系统原理示意图。
在任意情况下,希望液而髙度c维持不变, 试说明系统工作原理并画出系统方块图。
解:系统的控制任务是保持液而髙度不变。
水箱是被控对彖,水箱液位是被控变量。
电位器用来设置期望液位髙度c•(通常点位器的上下位移来实现)。
当电位器电刷位于中点位置时,电动机不动,控制阀门有一左的开度,使水箱的流入水屋与流岀水量相等,从而使液面保持在希望高度C•上。
一旦流出水量发生变化(相当于扰动),例如当流岀水量减小时,液面升髙,浮子位置也相应升高,通过杠杆作用使电位器电刷从中点位宜下移,从而给电动机提供一定的控制电压,驱动电动机通过减速器减小阀门开度,使进入水箱的液体流量减少。
这时,水箱液位下降.浮子位巻相应下降,直到电位器电刷回到中点位置为止,系统重新处于平衡状态,液位恢复给定髙度。
反之,当流出水量在平衡状态基础上增大时,水箱液位下降,系统会自动增大阀门开度,加大流入水量,使液位升到给左髙度cl 系统方框图如图解1・4・1所示。
图解1.4.1液位自动控制系统方框图1. 2恒温箱的温度自动控制系统如图1. 19所示。
(1) 画出系统的方框图:(2) 简述保持恒温箱温度恒左的工作原理;(3) 指出该控制系统的被控对象和被控变疑分别是什么。
「调压器220〜图1.19恒温箱的温度自动控制系统解:恒温箱采用电加热的方式运行,电阻丝产生的热量与调压器电压平方成正比,电压增 高,炉温就上升。
调压器电压由其滑动触点位苣所控制,滑臂则由伺服电动机驱动.炉子的 实际温度用热电偶测量,输出电压作为反馈电压与给左电圧进行比较,得岀的偏差电压经放 大器放大后,驱动电动机经减速器调宵调压器的电压。
在正常情况下,炉温等于期望温度T,热电偶的输岀电压等于给泄电压。
此时偏差为零, 电动机不动,调压器的滑动触点停留在某个合适的位置上。
这时,炉子散失的热量正好等于 从电阻丝获取的热量,形成稳定的热平衡状态,温度保持恒定。
第六章6-1 试求图6-T-1所示超前网络和滞后网络的传递函数和伯德图。
解:(a ),超前网络的传递函数为()1+=RCs RCss G ,伯德图如图所示。
题6-1超前网络伯德图(b ),滞后网络的传递函数为()11+=RCs s G ,伯德图如图所示。
题6-1滞后网络伯德图6-2 试回答下列问题,着重从物理概念说明:(1)有源校正装置与无源校正装置有何不同特点,在实现校正规律时他们的作用是否相同?(2)如果错误!未找到引用源。
型系统经校正后希望成为错误!未找到引用源。
型系统,应采用哪种校正规律才能满足要求,并保证系统稳定? (3)串联超前校正为什么可以改善系统的暂态性能?(4)在什么情况下加串联滞后校正可以提高系统的稳定程度?(5)若从抑制扰动对系统影响的角度考虑,最好采用哪种校正形式?解: (1)无源校正装置的特点是简单,但要达到理想的校正效果,必须满足其输入阻抗为零,输出阻抗为无限大的条件,否则很难实现预期效果。
且无源校正装置都有衰减性。
而有源装置多是由直流运算放大器和无源网络构成,能够达到较理想的校正效果。
(2)采用比例-积分校正可使系统由I 型转变为II 型。
(3)利用串联超前校正装置在剪切频率附近提供的相位超前角,可增大系统的相角裕度 ,从而改善系统的暂态性能。
(4)当ω减小,相频特性)(ωϕ朝0方向变化且斜率较大时,加串联滞后校正可以提高系统的稳定程度。
(5)可根据扰动的性质,采用带有积分作用的串联校正,或采用复合校正。
6-3 某单位反馈系统的开环传递函数为6418)(2++=s s s G (1)计算校正前系统的剪切频率和相角裕度。
(2)串联传递函数为1125.014.0)(++=s s s G c 的超前校正装置,求校正后系统的剪切频率和相角裕度。
(3)串联传递函数为1100110)(++=s s s G c 的滞后校正装置,求校正后系统的剪切频率和相角裕度。
(4)讨论串联超前校正、串联滞后校正的不同作用。
第一章 概论 习题及及解答1-1 试列举几个日常生活中的开环控制和闭环控制系统实例,并说明它们的工作原理。
略1-2. 图1-17是液面自动控制系统的两种原理示意图。
在运行中,希望液面高度0H 维持不变。
1.试说明各系统的工作原理。
2.画出各系统的方框图,并说明被控对象、给定值、被控量和干扰信号是什么?()a 工作原理:出水量2θ与进水量一致,系统处于平衡状态,液位高度保持在0H 。
当出水量大于进水量,液位降低,浮子下沉,通过连杆使阀门1L 开大,使得进水量增大,液位逐渐回升;当出水量小于进水量,液位升高,浮子上升,通过连杆使阀门1关小,液位逐渐降低。
其中被控对象是水槽,给定值是液面高度希望值0H 。
被控量是液面实际高度,干扰量是出水量2θ。
()b 工作原理:出水量与进水量一致系统处于平衡状态,电位器滑动头位于中间位置,液面为给定高度0H 。
当出水量大于(小于)进水量,浮子下沉(上浮)带动电位器滑动头向上(下)移动,电位器输出一正(负)电压,使电动机正(反)转,通过减速器开大(关小)阀门1L ,使进水量增大(减小),液面高度升高(降低),当液面高度为0H 时,电位器滑动头处于中间位置,输出电压为零,电动机不转,系统又处于平衡状态。
其中被控对象是水槽,给定值为液面高度希望值0H ,被控量是液面实际高度,干扰量是出水量2θ。
()a ,()b 系统结构图如下图1-3 什么是负反馈控制?在图1-17(b)系统中是怎样实现负反馈控制的?在什么情况下反馈极性会误接为正,此时对系统工作有何影响?解:负反馈控制就是将输出量反馈到输入端与输入量进行比较产生偏差信号,利用偏差信号对系统进行调节,达到减小或消除偏差的目的。
图1-17()b系统的输出量液面实际高度通过浮子测量反馈到输入端与输入信号(给定液面高度)进行比较,如果二者不一致就会在电位器输出一电压值——偏差信号,偏差信号带动电机转动,通过减速器使阀门1开大或关小,从而进入量改变,当输出量——液面实际高度与给定高度一致偏差信号为0,电机,减速器不动,系统又处于平衡状态。
6-1 对线性系统A B C D =+⎧⎨=+⎩x x uy x u 作状态反馈v x u +-=K ,试推导出闭环系统的状态空间模型和传递函数。
解 将反馈律代入状态空间模型,则有()()()()A B K A BK B C D K C DK D =+-+=-+=+-+=-+x x x v x vy x x v x v因此,闭环系统的状态空间模型和传递函数分别为1()()()()()K A BK B C DK D G s C DK sI A BK B D-=-+⎧⎨=-+⎩=--++x x v y x v6-2 对线性系统A B C D =+⎧⎨=+⎩x x uy x u 作输出反馈u =-H y +v ,试推导出闭环系统的状态空间模型和传递函数。
解 将反馈律代入状态空间模型的输出方程,则有()C D H C DH D =+-+=-+y x y v x y v即()I DH C D +=+y x v因此,当()I DH +可逆时,闭环系统输出方程为11()()I DH C I DH D --=+++y x v将反馈律和上述输出方程代入状态方程,则有11()[()][()]A B A B H A BH I DH C BH I DH D B --=+=+-+=-++++x x ux y v x v当闭环系统的状态空间模型和传递函数分别为111111111[()][()]()()()()[()][()]()H A BH I DH C BH I DH D B I DH C I DH D G s I DH C sI A BH I DH C BH I DH D B I DH D ---------⎧=-++++⎨=+++⎩=+-++++++x x v y x v2 6-3 给定被控系统的状态方程为121310⎡⎤⎡⎤=+⎢⎥⎢⎥⎣⎦⎣⎦x x u 试确定一个状态反馈阵K,使闭环系统的极点配置在-2±j 处。
解 1) 判断系统的能控性。
开环系统的能控性矩阵为11[]03B AB ⎡⎤=⎢⎥⎣⎦则开环系统为状态能控,可以进行任意极点配置。
2) 求能控规范II 形:[]111121112221[01][]013011313010,521c c c c T BAB T T T A A T AT B T B ----==⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦⎡⎤⎡⎤====⎢⎥⎢⎥⎣⎦⎣⎦因此系统开环特征多项式f (s )=s 2-2s-5,而由期望的闭环极点-2±j 所确定的期望的闭环特征多项式f (s )=s 2+4s+5,得系统的状态反馈阵K 为1**12221120111816[--][5-(-5)4-(-2)]31333c c K KT a a a a T --⎡⎤⎡⎤===⨯=⎢⎥⎢⎥⎣⎦⎣⎦ 则在反馈律u =-K x +v 下的闭环系统的状态方程为510/31310v --⎡⎤⎡⎤=+⎢⎥⎢⎥⎣⎦⎣⎦x x 通过验算可知,该闭环系统的极点为-2±j,达到设计要求。
6-4 给定被控系统的状态方程为02100020010020100021⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥-⎢⎥⎢⎥-⎣⎦⎣⎦x x u问能否确定一个状态反馈阵K,使闭环系统的极点分别配置在下列位置:(1) s 1=-2, s 2=-2, s 3=-2, s 4=-2 (2) s 1=-3, s 2=-3, s 3=-3, s 4=-2 (3) s 1=-3, s 2=-3, s 3=-3, s 4=-3解: 由于开环系统模型为约旦规范形,因此由模态判据知,该系统特征值2的子系统完全能控,因此2重的开环极点2 可以任意配置;而特征值-2对应的2维子系统不完全能控,但由于其对应的2维子系统的能控性矩阵的秩为1,故2重的开环极点-2应有一个可以任意配置,一个不能配置(不能控)。
根据上述分析结果,可以判定如下:3(1) s 1=-2, s 2=-2, s 3=-2, s 4=-2由于期望闭环极点有一个为-2,因此,可以将可任意配置的3个极点配置为-2,而一个不能配置的极点也为-2,符合期望极点要求。
故,应存在状态反馈律将闭环极点配置在期望位置上。
(2) s 1=-3, s 2=-3, s 3=-3, s 4=-2由于期望闭环极点有一个为-2,因此,可以将可任意配置的3个极点配置为-3,而一个不能配置的极点还为-2,符合期望极点要求。
故,应存在状态反馈律将闭环极点配置在期望位置上。
(3) s 1=-3, s 2=-3, s 3=-3, s 4=-3由于期望闭环极点没有-2极点,因此,不存在状态反馈律将不能配置的极点-2还为配置在期望的4个极点的任何一个上。
6-5 判断下述系统是否能镇定,若能镇定,试设计一个状态反馈使系统成为稳定的。
(1) u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=100310100001(2) u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=100201020101解: (1) 先对系统进行能控性分解[]000rank rank 01123134B AB n ⎡⎤⎢⎥==<=⎢⎥⎢⎥⎣⎦表明系统不完全能控,取能控性分解变换矩阵c P 为004010130c P ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦, 1310100.2500c P --⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦于是可得1010130001c c A P AP -⎡⎤⎢⎥==⎢⎥⎢⎥-⎣⎦; 1100c B P B -⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦原系统的能控性分解为1122010113000010⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥-⎣⎦⎣⎦x x u x x 由于该系统的不能控部分只有一个具有负实部的极点-1,因此不能控子系统是稳定的,系统是可镇定的。
再对能控部分进行极点配置。
由上可知,系统的能控部分为4 110113A ⎡⎤=⎢⎥⎣⎦,110B ⎡⎤=⎢⎥⎣⎦设*A 为具有期望特征值的闭环系统矩阵,且1111*~~~K B A A -=,本例中设期望的闭环极点取为-3和-2, 因此有[]12*111112011113130k k A A B K k k --⎡⎤⎡⎤⎡⎤=-=-=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦显然,当反馈阵1~K 为[][]112831K k k ==此时,闭环极点为-3和-2。
求取原系统的状态反馈镇定矩阵K[][]11031083100100780.2500c K K P --⎡⎤⎢⎥⎡⎤===⎣⎦⎢⎥⎢⎥⎣⎦经检验,状态反馈后得到的如下闭环系统矩阵为镇定的。
100001065A BK ⎡⎤⎢⎥-=⎢⎥⎢⎥--⎣⎦(2) 先对系统进行能控性分解u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=100201020101 []013rank rank 00023125B AB n --⎡⎤⎢⎥==<=⎢⎥⎢⎥⎣⎦表明系统不完全能控,取能控性分解变换矩阵c P 为010003120c P -⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦, 12011000.1/30c P -⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦于是可得1010130002c c A P AP -⎡⎤-⎢⎥==⎢⎥⎢⎥-⎣⎦; 1100c B P B -⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦原系统的能控性分解为1122010113000020⎡⎤⎡⎤-⎡⎤⎢⎥⎢⎥⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥-⎣⎦⎣⎦x x u x x5由于该系统的不能控部分只有一个具有负实部的极点-1,因此不能控子系统是稳定的,系统是可镇定的。
(2) 对能控部分进行极点配置。
由上可知,系统的能控部分为110113A -⎡⎤=⎢⎥⎣⎦, 110B ⎡⎤=⎢⎥⎣⎦设*A 为具有期望特征值的闭环系统矩阵,且1111*~~~K B A A -=,本例中设期望的闭环极点取为-1和-2, 因此有[]12*111112*********k k A A B K k k ----⎡⎤⎡⎤⎡⎤=-=-=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ 显然,当反馈阵1~K 为[][]112619K k k ==此时,闭环极点为-1和-2。
(3) 求取原系统的状态反馈镇定矩阵K[][]11201061901007060.1/30c K K P -⎡⎤⎢⎥⎡⎤==-=-⎣⎦⎢⎥⎢⎥⎣⎦经检验,状态反馈后得到的如下闭环系统矩阵为镇定的。
101020604A BK -⎡⎤⎢⎥-=-⎢⎥⎢⎥-⎣⎦6-6 已知系统状态空间模型的各矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=001100010A ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=010B ,⎥⎦⎤⎢⎣⎡=100001C 试判断该系统的输出反馈可镇定性。
解 设输出反馈u =[h 1 h 2]y ,因此闭环系统的系统矩阵为[]121201001000011001100001001100A BHC h h h h ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥-=--⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥-⎣⎦⎣⎦⎡⎤⎢⎥=---⎢⎥⎢⎥-⎣⎦其特征多项式为s 3+ h 1s -(1+ h 2)。
由劳斯判据可知,该系统不可能通过输出反馈进行镇定。
本题系统为能控能观的,根据定理6-5,其输出反馈可镇定性。
6-7 已知待解耦的传递函数矩阵为。
6 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++-+-=11)1(1111)(s s s s s ss G p 试作一前馈补偿器)(s G c 使系统解耦,且其传递函数阵为⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++=)2)(1(100)1(1)(2s s s s G解 根据6.4.1节的方法,前馈补偿器)(s G c 为[]111222()()()()1111010(1)(1)11111001(1)1(1)(2)(1)(2)1011(1)1(1)11120(1)(2)11(12c p G s G s G s I G s s s s s s s s s s s s s s s s s ss s s s s ---=-⎡⎤⎡⎤⎡⎤--⎢⎥⎢⎥⎢⎥+++⎢⎥⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥++++++⎣⎦⎣⎦⎣⎦⎡⎤⎡⎤⎢⎥+-+⎢⎥⎢⎥=-+⎢⎥⎢⎥-⎢⎥⎣⎦⎢⎥++-⎣⎦+=22222(1)2)311(1)(2)(31)s s s s s s s s s s s +⎡⎤⎢⎥+++⎢⎥⎢⎥-+-⎢⎥+++⎣⎦6-8 已知状态空间模型的各矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=400020012A ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=011000B ,⎥⎦⎤⎢⎣⎡=001100C 试判断该系统能否实现状态反馈解耦。
若能,求其积分型解耦系统。
解:由于122[10],[00],[01],T C B C B C AB ===可知7120,1l l ==。