管道内外壁攀爬多用机器人
- 格式:pptx
- 大小:112.35 KB
- 文档页数:7
管道攀爬机器人结构设计及行走动力特性分析一、结构设计:1.机器人主体结构:管道攀爬机器人的主体结构一般由多个可伸缩的模块组成,每个模块包括一个电机、行走轮和一个伸缩杆。
2.伸缩机构:机器人通过伸缩杆来适应不同管道尺寸。
伸缩杆一般采用多节设计,每个节段之间通过齿轮或链条进行连接,以实现伸缩功能。
3.行走轮和传动机构:机器人采用行走轮来实现在管道内的行走。
行走轮通常由橡胶材料制成,提供良好的摩擦力。
传动机构一般为电机与行走轮的传动装置,通常采用齿轮传动或链条传动。
4.控制系统:机器人的控制系统包括传感器、执行器和控制器。
传感器可以感知机器人的位置、姿态和环境条件等信息,以便进行自主导航和任务执行。
执行器包括电机和伸缩杆等组件,用于控制机器人的运动和伸缩。
控制器负责接收传感器信息,并根据预设的算法控制机器人的运动。
二、行走动力特性分析:1.爬行速度:管道攀爬机器人的爬行速度取决于行走轮的直径、电机的转速和传动机构的设计等因素。
一般来说,机器人爬行速度应该足够快,以提高任务完成效率。
2.负载能力:机器人承载工具和传感器进行任务执行,因此需要具有较大的负载能力。
负载能力的大小与机器人的结构强度和设计参数有关。
3.自稳定性:机器人在管道内行走时需要具备较好的自稳定性,以应对管道内的复杂环境。
自稳定性主要通过控制系统实现,通过传感器检测机器人的姿态和环境条件,并及时做出调整。
4.能耗与动力供应:管道攀爬机器人通常采用电池供电,因此需要考虑能耗和续航时间。
一般通过优化结构设计和控制算法,减小阻力和能耗,延长电池寿命。
5.适应性:管道攀爬机器人需要适应多种管道的尺寸和形状。
因此,其结构设计应具有一定的自适应性,能够根据管道的不同尺寸进行伸缩和调整。
综上所述,管道攀爬机器人的结构设计和行走动力特性是保证机器人能够在管道内进行任务执行的关键要素。
通过合理的结构设计和动力调节,可以使机器人具有较高的工作效率和可靠性,适应不同尺寸和形状的管道。
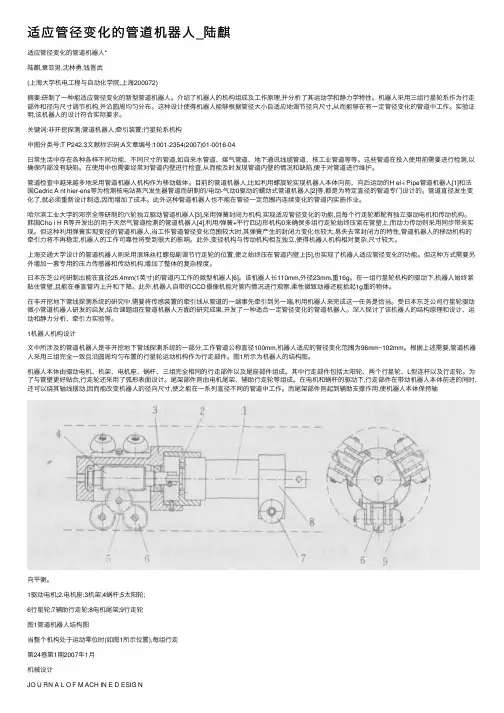
适应管径变化的管道机器⼈_陆麒适应管径变化的管道机器⼈*陆麒,章亚男,沈林勇,钱晋武(上海⼤学机电⼯程与⾃动化学院,上海200072)摘要:研制了⼀种能适应管径变化的新型管道机器⼈。
介绍了机器⼈的机构组成及⼯作原理,并分析了其运动学和静⼒学特性。
机器⼈采⽤三组⾏星轮系作为⾏⾛部件和径向尺⼨调节机构,并沿圆周均匀分布。
这种设计使得机器⼈能够根据管径⼤⼩⾃适应地调节径向尺⼨,从⽽能够在有⼀定管径变化的管道中⼯作。
实验证明,该机器⼈的设计符合实际要求。
关键词:⾮开挖探测;管道机器⼈;牵引装置;⾏星轮系机构中图分类号:T P242.3⽂献标识码:A⽂章编号:1001-2354(2007)01-0016-04⽇常⽣活中存在各种各样不同功能、不同尺⼨的管道,如⾃来⽔管道、煤⽓管道、地下通讯线缆管道、核⼯业管道等等。
这些管道在投⼊使⽤前需要进⾏检测,以确保内部没有缺陷。
在使⽤中也需要经常对管道内壁进⾏检查,从⽽能及时发现管道内壁的情况和缺陷,便于对管道进⾏维护。
管道检查中越来越多地采⽤管道机器⼈机构作为移动载体。
⽬前的管道机器⼈,⽐如利⽤螺旋轮实现机器⼈本体向前、向后运动的H el-i Pipe管道机器⼈[1]和法国Cedric A nt hier-ens等为检测核电站蒸汽发⽣器管道⽽研制的/电动-⽓动0驱动的蠕动式管道机器⼈[2]等,都是为特定直径的管道专门设计的。
管道直径发⽣变化了,就必须重新设计制造,因⽽增加了成本。
此外这种管道机器⼈也不能在管径⼀定范围内连续变化的管道内实施作业。
哈尔滨⼯业⼤学的邓宗全等研制的六轮独⽴驱动管道机器⼈[3],采⽤弹簧封闭⼒机构,实现适应管径变化的功能,且每个⾏⾛轮都配有独⽴驱动电机和传动机构。
韩国Cho i H R等开发出的⽤于天然⽓管道检测的管道机器⼈[4],利⽤/弹簧+平⾏四边形机构0来确保多组⾏⾛轮始终压紧在管壁上,⽽动⼒传动则采⽤同步带来实现。
但这种利⽤弹簧实现变径的管道机器⼈,当⼯作管道管径变化范围较⼤时,其弹簧产⽣的封闭⼒变化也较⼤,易失去常封闭⼒的特性,管道机器⼈的移动机构的牵引⼒将不再稳定,机器⼈的⼯作可靠性将受到很⼤的影响。
管道爬壁机器人设计作品内容简介现在的管道机器人在竖直或者是水平方向都很好的实现了检测与清理功能。
但至今还没有管道产品在复杂的管道中很好的工作。
为此我们设计了这款管道爬壁机器人,它既可以在水平管道中很好的工作还可以在竖直管道中完成工作,能够自如的在水平竖直交叉的复杂管道中完成检测,清理等工作。
该产品的主题结构为车体结构,在水平方向依靠车载力运动,在车体上安装有四个机械手臂,在机械手臂的前端安装有吸盘跟电磁铁,在塑料管道中依靠吸盘在竖直方向上运动,在铁质管道上利用电磁铁的磁力和机械手臂的交叉前进实现竖直方向的运动。
该作品灵活多变,不但可以适应复杂的管道还能够进行多样的工作。
我们依靠机械臂的灵活度与吸盘,电磁铁的吸力来实现该产品的爬壁功能,在水平方向上利用最传统的智能车作为动力,这样的设计完全可以满足水平方向与竖直方向的灵活转变,实现复杂管道的自由穿梭,进而可以让该机器人更好的实现其检测与清理功能。
该管道爬行机器人实现远程电脑控制,所得数据通过反馈处理使机器人能够完成各项做业。
一、研制背景及意义1、随着社会的快速发展,国家生产水平不断提高,产品更新也越来越快。
管道运输在我国运用比较普遍,但管道长期处在压力大的恶劣环境中,受到水油混合物、硫化氢等有害气体的腐蚀。
这些管道受腐后,管壁变薄,容易产生裂缝,造成漏油、漏气的问题,存在重大安全隐患和经济损失。
在管道广泛使用的今天,管道的检测、清理、维护成了一个亟待解决的问题。
但是管道的封闭性和工作环境决定了这项工作的艰难。
时至今日,虽然经过各国学者的努力,已经有各种各样的机器人,但是他们大都存在这样或那样的问题,而且功能不够强大。
2、人民对管道清洁机械的要求是不仅科技含量要高,而且还要绿色、节能、环保。
能够满足不同类型管道的检测、维护、清理等要求。
3、管道爬行机器人的研究更好地为管道的检测、维护、清理提供了新的技术手段,这种技术更好的提高了管道监测的准确性和管道清理的安全性,也便于管道工程管理维护人员制定维护方案,清除管道垃圾防止堵塞,事前消除管道的安全隐患,从而节约大量的维修费用,降低管道维护成本,保障工业生产和人民生活及财产安全。
管道机器人基础知识点总结一、概述管道机器人是指可以在管道内进行运动、操作和维修任务的特种机器人。
由于管道环境复杂且存在高风险,传统的手工操作难以胜任,因此管道机器人的出现填补了该领域的空白。
管道机器人通常具有自主导航、携带工具、进行维修等功能。
本文将从管道机器人的类型、结构、工作原理、应用领域和发展趋势等方面进行详细介绍。
二、类型1. 自由管道机器人自由管道机器人是一种能够在管道内侧自由移动的机器人,通常采用轮式或链条式设计。
自由管道机器人可以根据管道的弯曲情况和道路的状况自主调整路径和速度。
这种类型的机器人通常用于巡检和维修任务。
2. 拖曳管道机器人拖曳管道机器人是一种由外部设备通过绳索或电缆把机器人拖曳到目的地的机器人。
它通常比自由管道机器人更容易控制,但在自由度方面受限。
拖曳管道机器人通常适用于液体管道的巡检任务。
3. 平板式管道机器人平板式管道机器人通常由底盘、传感器和操控设备组成,外形类似于平板车。
它可以在管道内侧自由移动,携带传感器进行巡检任务。
4. 泳航式管道机器人泳航式管道机器人是一种能够在液体管道内游泳的机器人,通常采用螺旋推进或鱼类仿生设计,具有良好的自主导航能力。
5. 循环式管道机器人循环式管道机器人是一种通过管道内侧行驶,并在管道的两端以及途中的特定位置进行工作的机器人。
三、结构管道机器人的结构多种多样,其中最常见的结构包括底盘、传感器、操控设备、电源系统等,通过不同的组合可以实现不同的功能。
1. 底盘底盘是管道机器人的主要移动部件,通常采用轮式或链条式设计。
为了适应不同的管道环境,底盘通常具有一定的可调节性和适应性。
2. 传感器传感器是管道机器人的重要感知装置,通常包括视觉传感器、声纳传感器、触觉传感器等。
它们可以帮助机器人感知管道内部的情况,并为机器人的自主导航和工作提供依据。
3. 操控设备操控设备是管道机器人的重要操作装置,通常包括机械臂、夹爪、钻头等。
它们可以根据具体工作任务进行更换和组合,实现多种功能。
管道机器人的概况引言管道机器人是指能够在管道内进行巡检、维修和清理等作业的机器人。
随着工业化进程的加快和管道设施的不断增加,传统的人工操作方式已经无法满足管道作业的需求。
因此,管道机器人应运而生,成为管道工程领域中一种重要的技术手段。
管道机器人的分类管道机器人根据其功能和特点,可以分为以下几类:1.巡检机器人:巡检机器人主要用于检测管道内部的故障和异常情况。
它配备有多种传感器,可以实时监测管道的温度、压力、流速等参数,并将这些数据传输给操作人员进行分析和处理。
2.维修机器人:维修机器人主要用于修复管道故障。
它拥有强大的机械臂和工具,可以进行管道的焊接、切割、补漏等维修作业。
同时,维修机器人还具备精确定位和遥控操作功能,可以在狭小的管道内完成复杂的维修任务。
3.清洁机器人:清洁机器人主要用于清理管道内的杂物和积垢。
它配备有高压喷水装置和刷盘装置,可以将管道内的污物冲刷清洁,提高管道的流量和通畅度。
4.安检机器人:安检机器人主要用于检测管道内是否存在危险品或其他安全隐患。
它配备有气体传感器和摄像头等设备,可以实时监测管道内的气体浓度和图像情况,确保管道的安全运行。
管道机器人的工作原理管道机器人通常由机械结构、传感器、控制系统和电源等组成。
其工作原理可以分为以下几个步骤:1.导航定位:管道机器人会通过激光传感器或者摄像头等设备,获取管道内部的地形和障碍物信息,并根据此信息进行导航和定位。
同时,它还可以利用惯性导航、全球定位系统等技术手段进行精确定位。
2.数据采集:管道机器人会通过传感器获取管道内部的各种数据信息,包括温度、压力、流速、气体浓度等参数。
这些数据会被实时传输到控制系统中进行处理和分析,以便操作人员进行决策。
3.作业执行:根据任务需求,管道机器人会配备不同的工具和装置,进行巡检、维修或清洁等作业。
它可以利用机械臂、刷盘装置、喷水装置等工具,完成各种复杂的作业任务。
4.远程监控:管道机器人通常可以与远程监控中心进行联网,将作业情况实时传输给操作人员。
竖直管道爬行机器人小组成员:刘晓燕、周平、时佳、王迪阳、刘传亮一、设计背景:随着科学技术的发展,管道在当今社会已经得到了广泛的应用。
管道在长期的使用中难免会出现破裂、堵塞等,人们往往为了寻找管道上的一个裂纹而花费大量的人力和物力。
如今水平管道的检测、清理、维护已经不再是个难题,但竖直管道中的检测、清理、维护仍然有待解决。
而我们设计的机器人正是为满足在竖直管道的爬行而设计的,它具有一定的承载能力,可以成为管道检测、清洗设备的载体、检修的运输工人,使得管道的检测、清洁等工作易于实现。
二、组成介绍:该机器人由三部分组成,包括一个伸缩模块和两个支撑模块。
伸缩模块主要由曲柄连杆构成,利用驱动电机的转动来实现机器人的行走;两个支撑模块结构上完全一样,都是由初始弹簧提供微张力而贴附在竖直管道内壁。
由电动机的转动产生推力,使机器人的脚与管壁压紧而锁死,从而产生机器人行走所需的静摩擦力。
伸缩模块和支撑模块按一定的顺序工作,从而实现机器人在管道内的爬行。
三、结构设计:(1)支撑架的设计为满足不同内径管道的需求,将支撑架设计为可伸缩的。
同时将上下两组支撑架设计为空间十字交叉形,这样就满足机器人在管道中爬行的稳定性,,并在上下两组支撑架中各安装有被压缩的弹簧,以提供一初始的张力,使摩擦滑块与管道内壁能够充分接触。
(2) 摩擦滑块的设计摩擦滑块与管道内壁接触的部分,滑块的上部分有圆滑过渡以防止遇到障碍物时机器人被卡死。
而且这部分是可拆卸的,对不同材质的管道可选用不同材料的滑块接触面与管道内壁接触。
(3)微电机及曲柄滑块部分设计微电机通过杆件固定在机器人下肢的正下方,一方面为可降低机器人的重心使机器人在一开始时能够稳定的贴在管道内壁而不下滑,另一方面使上肢与电动机之间的距离增加从而使连杆的摆动幅度减小使上肢运行稳定(4)辅助电机控制机器人下降部分设计分别在上下肢两支撑架中间的弹簧中穿一根不可伸缩的绳,绳的一端固定在其中的一个支撑架上,另一端穿过另一支撑架连在辅助电机上。
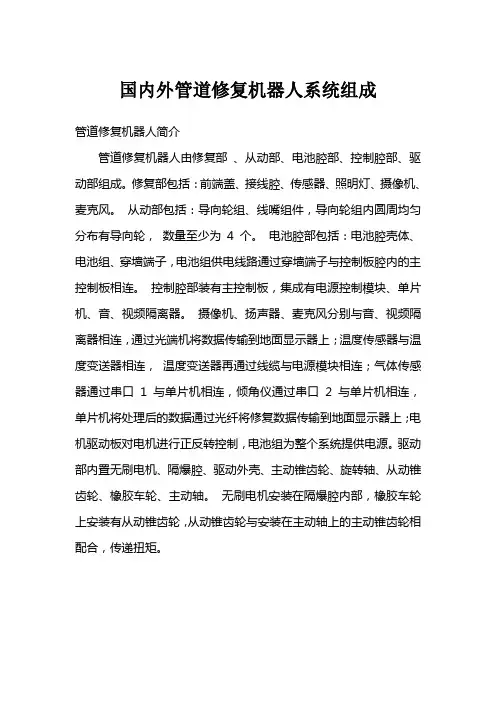
国内外管道修复机器人系统组成管道修复机器人简介管道修复机器人由修复部、从动部、电池腔部、控制腔部、驱动部组成。
修复部包括:前端盖、接线腔、传感器、照明灯、摄像机、麦克风。
从动部包括:导向轮组、线嘴组件,导向轮组内圆周均匀分布有导向轮,数量至少为4个。
电池腔部包括:电池腔壳体、电池组、穿墙端子,电池组供电线路通过穿墙端子与控制板腔内的主控制板相连。
控制腔部装有主控制板,集成有电源控制模块、单片机、音、视频隔离器。
摄像机、扬声器、麦克风分别与音、视频隔离器相连,通过光端机将数据传输到地面显示器上;温度传感器与温度变送器相连,温度变送器再通过线缆与电源模块相连;气体传感器通过串口1 与单片机相连,倾角仪通过串口2 与单片机相连,单片机将处理后的数据通过光纤将修复数据传输到地面显示器上;电机驱动板对电机进行正反转控制,电池组为整个系统提供电源。
驱动部内置无刷电机、隔爆腔、驱动外壳、主动锥齿轮、旋转轴、从动锥齿轮、橡胶车轮、主动轴。
无刷电机安装在隔爆腔内部,橡胶车轮上安装有从动锥齿轮,从动锥齿轮与安装在主动轴上的主动锥齿轮相配合,传递扭矩。
管道修复机器人系统的工作过程:尼龙轮安装在转动臂上,通过扭转弹簧提供支撑力,使得橡胶车轮、尼龙轮同时与管道(或救援孔)内壁相接触,由此橡胶车轮、尼龙轮分别与管道(或救援孔)内壁产生摩擦力,无刷电机通电,带动橡胶车轮旋转,通过控制器控制管道机器人的前进、后退、停止。
宁波广强机器人科技有限公司自主研发的DG300普及型管道机器人DG300普及型管道机器人是一套综合运用CCTV、声纳和激光的检测设备,适用于管径300mm-2000mm管道的检测。
对管道的水下部分进行声纳检测,水上部分进行CCTV和激光检测。
可以全面的反应监测管道内部情况,结合数据处理软件可以生成管道的剖面图,分析管道的形变、淤积状况,生成标准检测报告。
已经达到国内一流水平,拥有发明专利的多种埋钉机填补同行业空白。
![[高分子材料] 受树栖蛇爬树行为启发,西南科大研发出管线外壁攀爬软体机器人](https://uimg.taocdn.com/3b78dcb8524de518964b7df8.webp)
受树栖蛇爬树行为启发,西南科大研发出管线外壁攀爬软体机器人西南科技大学制造学院臧红彬副教授研究团队近日在国际机器人领域TOP期刊《Soft Robotics》发表了关于仿生软体机器人最新研究成果——“Soft Rod-Climbing Robot Inspired by Winding Locomotion of Snake”,这是世界上首次实现仿树栖蛇攀爬树干运动的软体机器人。
硕士研究生廖冰和指导老师臧红彬博士为论文共同第一作者,团队成员陈明扬、王韵杰、郎鑫、朱娜娜、杨正参与软体机器人设计、制造、控制、实验、优化等工作,易艳参与结构图设计工作。
西南科技大学为第一通讯单位,臧红彬博士为论文唯一通讯作者。
图1 树栖蛇攀爬树干树栖蛇经过亿万年的自然演变,进化出了独特的攀爬树干行为(图1)。
受此启发,团队创新设计了一种类蛇缠AHAHAGAHAGAGGAGAGGAFFFFAFAF绕式攀爬软体机器人仿生结构,主要由2个仿蛇缠绕式软体执行器和1个伸缩式软体执行器组成(图2),采用气动驱动作为动力源。
该软体执行器为团队自主研发,主要由波纹管和控制缠绕方向的弹性层和约束层构成,成本低廉,便于生产,性价比极高。
通过分析树栖蛇的攀爬运动机理,提出了仿蛇运动六个步态的控制策略,并研发了控制系统(图3)。
图2 仿树栖蛇软体机器人结构设计图3 运动步态控制策略及其控制系统基于常曲率弯曲假设,建立了软体执行器的运动学模型(图4)。
分析缠绕软体执行器随气压的弯曲运动和伸缩软体执行器随气压的线性运动(图5)。
同时也评估了软体执行器的变形能力和不同结构参数对运动速度与负载性能的影响规律(缠绕软体执行器环数与旋向、伸缩软体执行器节数、负载和频率,图6)。
图6 结构参数对运动速度与负载性能的影响规律实物样机测试显示,该软体机器人可实现高效攀爬运动。
例如,能以s的最高速度垂直攀爬(每秒倍自身体长,图7左上);攀爬时能携带500g的有效负载(超AHAHAGAHAGAGGAGAGGAFFFFAFAF过自身重量25倍,图7上中)和攀爬不同摩擦表面的杆件、近直角的杆件(图7 右上)以及变直径的杆件自适应攀爬能力(图7下)。
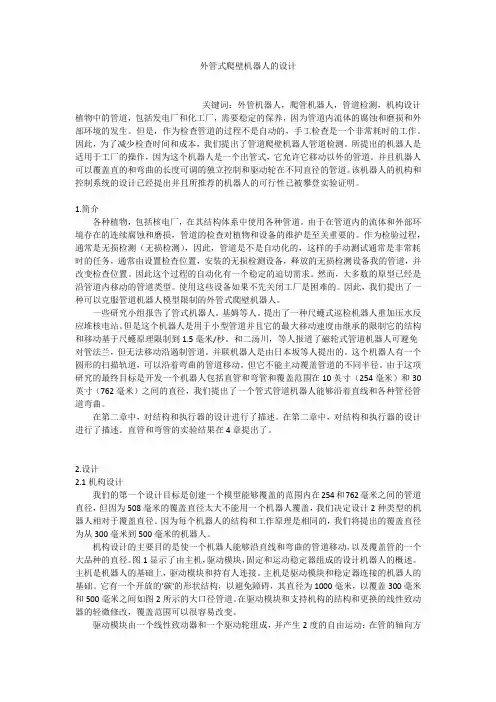
外管式爬壁机器人的设计关键词:外管机器人,爬管机器人,管道检测,机构设计植物中的管道,包括发电厂和化工厂,需要稳定的保养,因为管道内流体的腐蚀和磨损和外部环境的发生。
但是,作为检查管道的过程不是自动的,手工检查是一个非常耗时的工作。
因此,为了减少检查时间和成本,我们提出了管道爬壁机器人管道检测。
所提出的机器人是适用于工厂的操作,因为这个机器人是一个出管式,它允许它移动以外的管道。
并且机器人可以覆盖直的和弯曲的长度可调的独立控制和驱动轮在不同直径的管道。
该机器人的机构和控制系统的设计已经提出并且所推荐的机器人的可行性已被攀登实验证明。
1.简介各种植物,包括核电厂,在其结构体系中使用各种管道。
由于在管道内的流体和外部环境存在的连续腐蚀和磨损,管道的检查对植物和设备的维护是至关重要的。
作为检验过程,通常是无损检测(无损检测),因此,管道是不是自动化的,这样的手动测试通常是非常耗时的任务,通常由设置检查位置,安装的无损检测设备,释放的无损检测设备我的管道,并改变检查位置。
因此这个过程的自动化有一个稳定的迫切需求。
然而,大多数的原型已经是沿管道内移动的管道类型。
使用这些设备如果不先关闭工厂是困难的。
因此,我们提出了一种可以克服管道机器人模型限制的外管式爬壁机器人。
一些研究小组报告了管式机器人。
基姆等人。
提出了一种尺蠖式巡检机器人重加压水反应堆核电站。
但是这个机器人是用于小型管道并且它的最大移动速度由继承的限制它的结构和移动基于尺蠖原理限制到1.5毫米/秒。
和二汤川,等人报道了磁轮式管道机器人可避免对管法兰,但无法移动沿遏制管道。
并联机器人是由日本坂等人提出的。
这个机器人有一个圆形的扫描轨道,可以沿着弯曲的管道移动。
但它不能主动覆盖管道的不同半径。
由于这项研究的最终目标是开发一个机器人包括直管和弯管和覆盖范围在10英寸(254毫米)和30英寸(762毫米)之间的直径,我们提出了一个管式管道机器人能够沿着直线和各种管径管道弯曲。
一种支撑式管道攀爬机器人研究与应用摘要针对核电厂二回路汽水管道检查需求,研究设计了一种支撑式管道攀爬机器人,利用压杆支撑的方式实现了竖直管道中攀爬,可用于内径100-300mm范围管道的内部检查。
介绍了机器人的结构组成,分析了机器人在管道中的受力情况,并推导出了机器人稳定攀爬的最小支撑力需求,完成了样机制作和样机实验。
关键词管道机器人;支撑式;竖直攀爬1.引言管道作为气态和液态物资的重要输送设施,广泛应用于石化、天然气、热力发电厂、市政等多个领域[1]。
为了应对管道内大量的检测和维修工作,管道机器人应运而生。
根据实际需求,管道机器人工作的管道形式通常复杂多样,如倾斜管、竖直管、弯管、三通管、变径管等[2]。
目前国外对管道机器人的研究较为先进,如德国Endo公司的Crab-Robot管道机器人、加拿大Inuktun公司的Versatrax管道机器人[3],通过一系列的产品来应对不同管径的管道,但单个机器人的应用管道范围却有限。
国内一些公司也研发了各种管道机器人,但大多还是应用于市政排水管等大口径、小坡度管道,无法攀爬各种管径的竖直管道。
针对核电厂二回路各种汽水管道的检查需求,研究了一种支撑式管道攀爬机器人,能够满足内径100-300mm范围管道的检查需求。
1.机器人总体结构该管道攀爬机器人的总体架构如图1所示,主要由便携式控制箱、一体化光缆、机器人车体构成。
便携式控制箱内安装有控制器和视频显示器。
通过操作便携式控制器向机器人发送各种控制指令,从而控制管道机器人的各个部件,实现机器人前进、后退、转弯,摄像头旋转、缩放,以及灯光亮度调整等功能。
同时,机器人摄像头拍摄的视频以及各种传感器数据也通过一体化电缆传回控制箱上实时显示。
机器人视频传输、控制和供电通过一体化光缆实现。
同时,该一体化光缆还充当安全绳的作用,当机器人在管道中故障时,能够通过光缆将其救出。
图1管道攀爬机器人总体架构管道机器人的车体部分如图2所示。
工业管道机器人系统介绍1.管道机器人介绍管道机器人依据不一样的驱动方式大概上风为八类:1.流动式机器人 ,这种机器人没有驱动装置,不过跟着管内流体流动 ,属于不需要耗费能源的被动型机器人,可是其运动模式相当有限。
2.轮式机器人 ,这一类机器人宽泛运用于管道检查工作,当前很多的商业机器人就是这一种类。
3.履带式机器人 ,即用履带取代轮子。
4.腹壁式机器人 ,这种机器人经过能够伸展的机械臂紧贴管道内壁,推动机器人行进。
5.行走式机器人 ,这种机器人经过机械足运动,可是这种机器人需要大批驱动器, 而且难以控制。
6.蠕动式机器人 ,这种机器人像蚯蚓同样经过身体的伸缩行进。
7.螺旋驱动式 ,即驱动机构做旋转运动 ,螺旋行进。
8.蛇型机器人 ,这种机器人有很多关节 ,像蛇同样前行。
当前市场上运用最多的就是轮式管道机器人 ,广强机器人研发了蛇形机器人可适应复杂曲折多的管道。
广强管道机器人功能齐备 ,样式多样 ,合用于 100mm-2000mm 内径的各种管道 , 合用于于管道检测、矿井检测勘探、地道查收、地震搜救、消防营救、灾祸救助、电力巡检、反恐排爆、军事侦察、高温、高辐射、有毒环境等,经过剖析 ,出具报告 ,可作为工程项目的检测、勘探、查收、保养、建设及投资等依照。
2.管道机器人系统构成工业管道机器人由摄像机、灯光、电线及录影设施、拍照监督器、电源控制设施、承载摄像机的支架、牵引器、长度计算器构成1.爬行器 :运用爬行系统将摄像设施推动至管道内部,有摄像系统拍摄管道内部摄像 ,并合时将影像传递至控制台。
爬行器能够行进、退后、转向、停止、速度调理 ;2.镜头 :镜头坐能够抬升、降落、调理灯光;镜头也能够水平或垂直旋转、调焦、变倍、前后视切换等。
3.控制器 :CCTV 的核心操作系统 ,负责发出控制指令 (爬行系统前行、倒退、摄像系统灯光等 ;在检测过程中主控制器能够及时显示、录制镜头传回的画面和信息 (机器行走的距离、姿态等状态。