日立电梯培训教材
- 格式:doc
- 大小:94.00 KB
- 文档页数:29

????日立电梯微机按电梯故障的严重程度分为五大类:第一类:???? 故障最严重,电梯立即停止,不能再起动,但如果是在门区,开关门有效。
通常这类故障有:安全装置故障、主副微机间的通信故障、主回路过电流、过电压及轿厢与控制屏的串行通信故障。
第二类:???? 运行中电梯立即停止,但可重新起动,执行低速自救,使电梯以低速运行到最近层开门放出乘客。
如同步位置错误,电梯以低速向端层运行,自动修正同步位置。
这类故障有:减速异常、同步位置错误、微机选层器计数错误、强迫减速开关粘死等。
第三类:???? 运行中的电梯立即向最近层站停靠,停止后不能再起动。
这类故障有:平层时间过长,大功率晶体管散热片过热等。
第四类:???? 并联或群控系统故障等。
这类故障发生时,电梯自动脱离并联或群控管理系统而成为独立运行电梯,并进行援助服务等。
第五类:???? 属于小故障,故障带有偶然性,发生后可能自动解除,对安全及整体运行影响细微。
对这类故障微机只作记录而不采取行动。
这类故障有:开、关门障碍,起动频度超负荷,负荷补偿故障等。
1、重要信号的安全检测???? 电梯的重要安全信号如安全钳开关、安全窗开关、轿内和轿顶急停开关、终端极限开关、限速器开关构成的急停信号,以及门联锁开关、强迫减速开关、极限开关等都通过FIO板分别送主微机和副微机。
主副微机之间通过并行通信互相交换信息,只要有一方收不到信号,或通信比较中两方信号不同都会使电梯立即急停或作相就处理。
2、继电器、接触器故障检测???? 继电器及接触器在微机的驱动下吸合或释放,如果触点粘死或不吸合动作,就有可能便电梯不能正常运行,甚至引起重大事故。
因此对于重要的器件,其触点信号送回微机,微机在驱动其吸合或释放的同时,判断该器件的动作是否良好,能判断出吸合故障还是释放故障。
这类器件如:门联锁继电器、主回路接触器、抱闸接触器等。
3、主回路故障检测???? 主回路的检测包括过电流、过电压、欠电压等。
日立YPVF电梯培训教程教案:日立YPVF电梯培训教程一、教学内容本节课将介绍日立YPVF电梯的基本原理、组成部分和操作方法。
教材的章节包括:1. 第一章:日立YPVF电梯概述2. 第二章:电梯的组成部分3. 第三章:电梯的操作与维护二、教学目标1. 学生能够理解日立YPVF电梯的基本原理和组成部分。
2. 学生能够掌握电梯的操作方法和维护技巧。
3. 学生能够了解电梯的安全注意事项。
三、教学难点与重点重点:日立YPVF电梯的基本原理、组成部分和操作方法。
难点:电梯的维护技巧和安全注意事项。
四、教具与学具准备教具:日立YPVF电梯模型、操作面板、维护工具。
学具:笔记本、笔、教材。
五、教学过程1. 实践情景引入:介绍日立YPVF电梯的实际应用场景,引发学生的兴趣。
2. 教材讲解:a. 第一章:介绍日立YPVF电梯的基本原理和特点。
b. 第二章:讲解电梯的组成部分,包括主机、导轨、轿厢等。
c. 第三章:讲解电梯的操作方法和维护技巧。
3. 例题讲解:通过具体的例题,讲解电梯的操作和维护方法。
4. 随堂练习:学生分组进行实践操作,巩固所学知识。
5. 板书设计:电梯的组成部分、操作方法和维护技巧。
6. 作业设计:a. 题目一:请简述日立YPVF电梯的基本原理。
b. 题目二:请列出电梯的组成部分及其功能。
c. 题目三:请说明电梯的操作步骤。
d. 答案:a. 日立YPVF电梯的基本原理是利用电动机驱动轿厢在导轨上运行,实现垂直运输。
b. 电梯的组成部分包括主机、导轨、轿厢、对重、控制柜等。
c. 电梯的操作步骤包括:1. 按下呼叫按钮,等待电梯到达。
2. 进入电梯,按下目的楼层按钮。
3. 电梯启动,到达目的楼层后,按下开门按钮。
4. 出电梯,按下开门按钮。
六、板书设计电梯的组成部分:主机、导轨、轿厢、对重、控制柜电梯的操作方法:1. 按下呼叫按钮2. 进入电梯,按下目的楼层按钮3. 电梯启动,到达目的楼层后,按下开门按钮4. 出电梯,按下开门按钮电梯的维护技巧:1. 定期检查电梯的运行状态2. 检查电梯的零部件是否完好3. 及时更换损坏的零部件4. 保持电梯的清洁和卫生七、作业设计题目一:请简述日立YPVF电梯的基本原理。
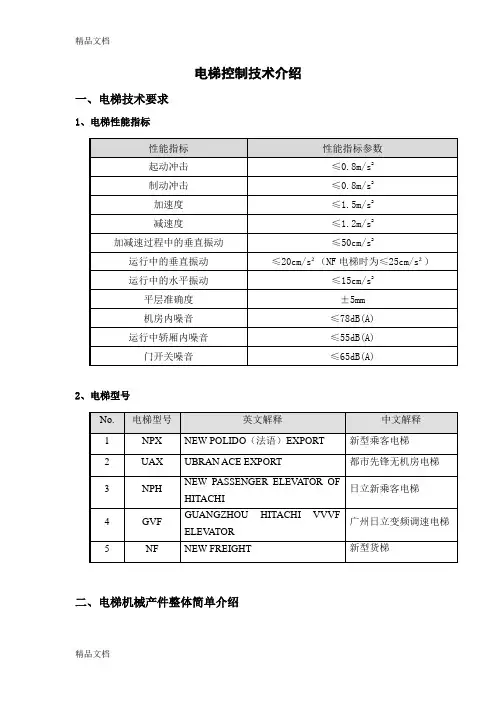
电梯控制技术介绍一、电梯技术要求1、电梯性能指标2、电梯型号二、电梯机械产件整体简单介绍电梯系统的组成情况基本相同,主要由曳引系统、导向系统、轿厢系统、门系统、对重装置系统、安全保护系统、电气控制及信号系统等组成。
其中UAX无机房电梯将曳引机、控制柜及限速器置于井道内,取消了专用的机房设置。
NPX、NPH、GVF、NF电梯的整体结构图——见有机房电梯整体结构图UAX电梯的整体结构图——见无机房电梯整体结构图1、曳引系统:功能:输出与传送动力,使电梯运行。
组成:主要由曳引机、曳引绳、导向轮、反绳轮等组成。
曳引机:包括电动机、制动器和曳引轮在内的靠曳引绳和曳引轮槽摩擦力驱动或停止电梯的装置。
曳引绳:连接轿厢和对重装置并靠与曳引轮槽的摩擦力驱动轿厢升降的专用钢丝绳。
导向轮:为增大轿厢与对重之间的距离,使曳引绳经曳引轮再导向对重装置或轿厢一侧而设置的绳轮。
反绳轮:在轿架和对重框架上部的动滑轮。
根据需要曳引绳绕过反绳轮可以构成不同的曳引比。
2、导向系统:功能:限制轿厢和对重的活动自由度,使轿厢和对重只能沿着导轨作升降运动。
组成:由导轨、导靴和导轨支架组成。
导轨:供轿厢和对重运行的导向部件,由钢轨和连接板组成。
导靴:设置在轿架和对重装置上,使轿厢和对重装置沿导轨运行的导向装置。
导轨支架:固定在井道壁或横梁上,支撑和固定导轨用的构件。
3、轿厢:功能:用以运载乘客或其他载荷的轿体部件。
组成:由轿架和轿厢组成。
轿架:固定和支撑轿厢本身和运载重量的承重框架,一般由上梁、立柱、底梁等组成。
轿厢:是电梯的工作容体,具有与载重量和服务对象相适应的空间。
由轿底、轿壁、轿顶、装饰顶等组成。
4、门系统:功能:封住层站出入口和轿厢出入口。
组成:由轿门、层门、开门机、门套等组成。
轿门:设在轿厢入口的门,由门板、轿门导轨架、轿厢地坎等组成。
层门:设在层站入口的门,又称厅门,由门板、层门导轨架、层门地坎、层门联动机构等组成。
开门机:使轿厢门和层门开启或关闭的装置。



1、运行准备当合上电梯动力电源开关后,R、S、T出线端有交流380V电压,控制柜上的电压表VM 应有电压指示,电源指示灯PL亮。
漏电检出器投入工作,如有漏电,99C吸合,其C2、A2点闭合,主开关FFB线圈吸合,使FFB不能合闸。
如无漏电,FFB可以合上,由阻容电路组成的过电压保护电路投入运行。
逆变器的排风扇FAN开始工作。
当三相电源R、S、T进入了整流器CNV后,经整流三相交流电变为直流电,2端为正,3端为负。
由于此时10T处于释放状态,直流电只能通过冲击限流电阻RSH向大电容FILC充电。
这个预充电功能减少了电梯启动时电流对电网的冲击,也保护了整流器和滤波电容。
此时虽然PM、NA线端有电压,由于逆变器处于关闭状态,所以此时无输出。
当电源开关FFB合上后,变压器TR1、TR2、TR4、TR6有电压,各控制回路得电,层楼指示器灯亮,合上控制柜上的轿厢照明开关LIGHT,轿内照明亮,排风扇有电。
此时如果安全系统正常,50B继电器吸合;门处于关闭状态,40D吸合;电梯处于运行准备状态。
2、外呼、开门外呼电源P22A是直流+22V电源,如果轿厢停在一层,乘客按一下一层的向上召唤按钮1U,+22V电源P22A经XH1-2,发光二极管,按钮1U,XH1-1接GD22AX;同时经FIO输入输出板的XH1-3接口,经输入缓冲器X711+0输入电脑后使输出缓冲器Z711+0输出保持信号,1层上召唤发光二极管1U发光。
经电脑检索,(1)电梯正在本层的平层位置;(2)电梯处于关门状态;(3)电梯无运行指令;(4)本层有呼梯信号。
则电脑判断为本层开门。
经输出缓冲器Z102输出开门信号并触发FLS导通,直流100V电压经A100→双向可控硅FLS→D1→101N(1,2)→R1→R2→R3→开门机A→门机开关DMCCUT→B100,使门电动机旋转开门。
开门分两个阶段。
第一阶段,电流经R5、D3分流,开门速度较快,第二阶段,开门行程开关14接通,电流经电位器R4的03、14端→14开关,D3与R5并联分流,少部分电流经开门机,开门速度较慢,直到将开门限位撞开,101N吸合,其常闭点(1、2)断开后,开门停止。

日立电梯YPVF培训教程1.引言日立电梯作为全球领先的电梯制造商之一,一直以来都致力于提供高品质、高效率的电梯产品和服务。
其中,YPVF驱动技术是日立电梯的核心技术之一,具有高效、节能、环保等优点。
为了更好地推广和应用YPVF驱动技术,日立电梯特别推出了YPVF培训教程,旨在为广大电梯从业人员提供系统的YPVF技术培训,提高其技术水平和业务能力。
2.YPVF驱动技术概述2.1YPVF驱动技术简介YPVF驱动技术,即永磁无刷同步电动机变频驱动技术,是一种先进的电梯驱动技术。
它采用永磁无刷同步电动机作为驱动电机,具有结构简单、运行平稳、效率高等优点。
同时,通过变频调速技术,可以根据电梯运行状态和负载变化,实现精确的速度控制和能量回收,从而达到节能环保的目的。
2.2YPVF驱动技术的优势(1)高效节能:YPVF驱动技术采用永磁无刷同步电动机,具有高效率、低能耗的特点,可以有效降低电梯运行成本。
(2)环保低碳:YPVF驱动技术可以实现能量回收,减少能源浪费,降低碳排放,符合现代社会对环保的要求。
(3)运行平稳:YPVF驱动技术采用先进的控制算法,可以实现精确的速度控制,保证电梯运行平稳,提高乘坐舒适性。
(4)维护方便:YPVF驱动技术采用模块化设计,结构简单,便于维护和检修。
3.YPVF培训教程内容3.1理论培训理论培训主要包括YPVF驱动技术的基本原理、电梯系统构成、控制策略等方面的知识。
通过理论培训,学员可以全面了解YPVF驱动技术的工作原理和应用优势,为实际操作奠定基础。
3.2实践操作实践操作是培训教程的重要环节,主要包括YPVF驱动系统的安装、调试、维护等方面的技能培训。
通过实践操作,学员可以掌握YPVF驱动技术的实际应用,提高解决实际问题的能力。
3.3案例分析案例分析是培训教程的特色环节,通过分析实际工程案例,使学员更加深入地了解YPVF驱动技术的应用场景和优势,提高学员的综合素质。
4.培训教程的实施与效果评估4.1培训教程的实施培训教程采用线上与线下相结合的方式,包括理论教学、实践操作、案例分析等环节。
日立电梯维修培训资料标题:深度解读日立电梯维修培训资料:打造高质量维保团队的必备指南摘要:本文将针对日立电梯维修培训资料展开深度解读,为日立电梯公司打造高质量维保团队提供必备指南。
我们将从维修培训的目标与重要性出发,逐步介绍日立电梯维修培训资料所包含的核心内容,以及培训过程中的关键要点与技巧。
通过本文,您将全面了解日立电梯维修培训资料的价值,并为提升团队技能水平提供指导。
1. 导论1.1 引言1.2 目的与重要性在导论部分,我们将引言并阐明本文对于日立电梯维修培训资料的深度解读的目的与重要性。
维修培训对于电梯公司来说至关重要,因为一个高质量的维保团队是确保电梯安全运行和客户满意的关键。
2. 日立电梯维修培训资料概览2.1 资料组成与结构2.2 相关技术知识与技能在本节中,我们将介绍日立电梯维修培训资料的组成与结构,以及涵盖的蕴含的相关技术知识与技能内容。
这些资料是基于日立电梯公司多年的经验和研究所编制,旨在为维修人员提供全面、系统化的培训。
3. 培训内容详解3.1 基础知识培训3.2 维修技能培训3.3 安全意识培训本节将对日立电梯维修培训资料中涵盖的基础知识培训、维修技能培训和安全意识培训进行详细解读。
基础知识部分将包括电梯的结构、工作原理和常见故障等相关知识;维修技能部分将重点介绍维修方法与技巧;安全意识部分将强调安全意识培养与日立电梯公司的安全标准。
4. 培训过程管理要点4.1 培训目标设定4.2 培训方法与形式4.3 测评与反馈机制在这一节中,我们将探讨培训过程管理的关键要点,如培训目标设定、培训方法与形式的选择,以及培训过程的测评与反馈机制的建立。
这些要点将帮助电梯公司更好地组织和管理维修培训,确保培训效果最大化。
5. 个人观点与理解5.1 价值与局限性5.2 培训成果评估本节中,我们将分享个人对于日立电梯维修培训资料的价值与局限性的观点与理解,并进一步讨论如何评估培训成果,从而不断改进培训内容和方式。
KYT(危险预知训练)培训教材广州日立电梯有限公司工程本部杨广斌2006年12月一、开展KYT培训的背景5月6日泰国日立一作业小组在进行更换电梯曳引钢丝绳的作业中发生事故,造成三死一重伤的惨剧。
当时电梯在23层,作业小组拆下了所有的电梯曳引钢丝绳,还拆下了限速器钢丝绳,轿厢用葫芦吊挂,轿顶站了五人,后用于挂葫芦的钢丝绳的绳夹滑动,钢丝绳松脱,一人就近逃到通井邻梯的轿顶,四人随电梯坠入底坑,三人当场死亡,一人重伤。
针对泰国日立发生的安全事故,为促进海外各公司的安全管理,HBS启动了海外安全推进中心,并于7月7日召集亚洲区的海外公司在马来西亚召开了首届国际安全会议。
2006年,广州日立的分公司、外协队也发生了较严重的安全事故。
1月11日,西安司保养工朱某在银川市某大楼欲消除层门卡阻,一只脚踏在层门踏板处,一只脚踏在导轨撑架处对层门进行检查,卡阻消除后层门自闭电梯返基站驶向一楼,朱某被轿顶撞击并从轿顶与井道间的缝隙跌入底坑致死。
10月29日,北工司安装工郭某在河北省三河市某工地电梯井道内施工,踏出9楼的厅门时因地面湿滑,脚底打滑失去重心往后坠入井道砸破安全网至底坑,送院不治身亡。
11月19日,某外协队在广州某大厦更换随行电缆,盘车时将制动器释放杆上得过紧且停止盘车时未将释放杆卸下,在从轿顶将拆下的随行电缆搬出层门时,电梯因制动力不足向上滑行,轿顶的潘某逃离轿顶时被井道部件撞击并坠入井道致死。
接连的事故给我们敲响了警钟,我们必须实施强有力的措施预防事故的再发生。
二、什么是KYT?KYT是Kiken Yochi Training的简称,意思是“危险预知训练”。
KYT要求作业人员在作业前互相讨论存在的安全隐患,制定预防措施,防患于未然。
KYT与我们所熟知的安全交底相似。
安全技术交底是指开工前必须向作业人员进行安全技术措施交底,双方还要在交底卡上签字。
我公司在电梯安装现场中设置的电梯安装现场资料(俗称白皮书)中就有电梯安装工程交底记录,以此督促作业负责人在作业前进行安全交底。
第一章NTVF电梯概要1、NTVF变频式电梯之主要设计大部分是参考日立B86的设计理念,其中主要改进日立B86电梯的类比马达控制系统,采用全数字化马达控制用DSP(TI-TMS320C5116BIT)而达到先进的全数字化电梯。
2、主控电脑的组成:与B86、Y95一样,拥有主MICON COMPUTER、从MICON COMPUTER的两个MICRO 系统,不同的是,主、从MICON COMPUTER分别采用8位80C320、16位80C196KC,该两个MICONCOMPUTER有以下功能,此外,轿厢信号多重传送(SDA),使用80C320。
(1)、主MICON COMPUTER的功能A、运转方式的选择;B、呼梯登记;C、运转控制;D、故障检出;E、位置检出;F、开关门控制;(2)、从MICON COMPUTER的功能A、速度控制;B、位置检出;C、R.E回授信号D、电梯运行控制(3)SDA MICON COMPUTER的功能A、控制板与轿厢侧的信号传送;B、SDA与SDC都用80C320;C、SDA本身具有处理资料的能力;D、只要四条传输线即可(Y2-6、7、8、9)(4)MICON COMPUTER的信号输入输出回路A、轿厢内重要信号:GATE SW、POSI等重要信号从主MICRO分别有独立的输入缓冲接口,重要信号输入到C。
JBOX内的SDC PCB板,接到控制盘的FIO PCB板,再输入到F-MPU PCB内的主、从MICRO。
B、轿厢内一般信号:轿厢内的呼梯信号(内指令)、轿厢呼梯应答信号(内指令灯)、轿厢位置显示信号,输入到SDC PCB,经过SDC与SDA进行通讯。
C、井道内的重要信号:DOOR SW(40D)、LIMIT SW、SLOW DOWN SW,接到控制盘的FIO PCB,再输入到F-MPU板的主、从MICRO。
D、层站的一般信号:层站的呼梯信号通过串行通讯信号线,直接输入到F-MPU板中,并通过同样的方法输出应答信号。
日立电梯培训教材一、教学内容本节课以日立电梯培训教材为例,主要讲解第三章“电梯的运行原理与操作方法”。
内容包括:1. 电梯的运行原理;2. 电梯的主要部件及其功能;3. 电梯的操作方法与注意事项。
二、教学目标1. 使学生了解电梯的运行原理,掌握电梯的主要部件及其功能;2. 培养学生正确操作电梯的能力,提高学生的安全意识;3. 引导学生运用所学知识解决实际问题,培养学生的实践能力。
三、教学难点与重点1. 电梯的运行原理;2. 电梯的主要部件及其功能;3. 电梯的操作方法与注意事项。
四、教具与学具准备1. PPT课件;2. 日立电梯培训教材;3. 电梯模型;4. 教学视频。
五、教学过程1. 实践情景引入:播放一段电梯运行的视频,引导学生关注电梯的运行原理及操作方法。
2. 知识讲解:(1)介绍电梯的运行原理,如电动机的作用、电梯的上升和下降原理等;(2)讲解电梯的主要部件及其功能,如轿厢、对重、导向轮、控制系统等;(3)阐述电梯的操作方法与注意事项,如电梯的启动与停止、电梯内的安全操作等。
3. 例题讲解:以教材中的实例为例,讲解电梯运行原理在实际操作中的应用。
4. 随堂练习:设置一些有关电梯运行原理和操作方法的练习题,让学生现场解答。
5. 课堂讨论:引导学生围绕电梯的安全操作展开讨论,提高学生的安全意识。
六、板书设计板书内容主要包括:电梯的运行原理、主要部件及其功能、操作方法与注意事项。
七、作业设计1. 作业题目:(1)简述电梯的运行原理;(2)列举电梯的主要部件,并说明其功能;(3)描述电梯的操作方法与注意事项;(4)结合实例,分析电梯运行原理在实际操作中的应用。
2. 答案:(1)电梯的运行原理:电动机驱动对重,通过钢丝绳牵引轿厢上下运动;(2)电梯的主要部件:轿厢、对重、导向轮、控制系统等;(3)电梯的操作方法与注意事项:按按钮控制电梯的上升和下降,注意轿厢内的安全操作等;(4)实例分析:如电梯在运行过程中出现故障,应立即使用紧急停止按钮,并通知维修人员。
电梯控制技术介绍一、电梯技术要求1、电梯性能指标2、电梯型号二、电梯机械产件整体简单介绍电梯系统的组成情况基本相同,主要由曳引系统、导向系统、轿厢系统、门系统、对重装置系统、安全保护系统、电气控制及信号系统等组成。
其中UAX无机房电梯将曳引机、控制柜及限速器置于井道内,取消了专用的机房设置。
NPX、NPH、GVF、NF电梯的整体结构图——见有机房电梯整体结构图UAX电梯的整体结构图——见无机房电梯整体结构图1、曳引系统:功能:输出与传送动力,使电梯运行。
组成:主要由曳引机、曳引绳、导向轮、反绳轮等组成。
曳引机:包括电动机、制动器和曳引轮在内的靠曳引绳和曳引轮槽摩擦力驱动或停止电梯的装置。
曳引绳:连接轿厢和对重装置并靠与曳引轮槽的摩擦力驱动轿厢升降的专用钢丝绳。
导向轮:为增大轿厢与对重之间的距离,使曳引绳经曳引轮再导向对重装置或轿厢一侧而设置的绳轮。
反绳轮:在轿架和对重框架上部的动滑轮。
根据需要曳引绳绕过反绳轮可以构成不同的曳引比。
2、导向系统:功能:限制轿厢和对重的活动自由度,使轿厢和对重只能沿着导轨作升降运动。
组成:由导轨、导靴和导轨支架组成。
导轨:供轿厢和对重运行的导向部件,由钢轨和连接板组成。
导靴:设置在轿架和对重装置上,使轿厢和对重装置沿导轨运行的导向装置。
导轨支架:固定在井道壁或横梁上,支撑和固定导轨用的构件。
3、轿厢:功能:用以运载乘客或其他载荷的轿体部件。
组成:由轿架和轿厢组成。
轿架:固定和支撑轿厢本身和运载重量的承重框架,一般由上梁、立柱、底梁等组成。
轿厢:是电梯的工作容体,具有与载重量和服务对象相适应的空间。
由轿底、轿壁、轿顶、装饰顶等组成。
4、门系统:功能:封住层站出入口和轿厢出入口。
组成:由轿门、层门、开门机、门套等组成。
轿门:设在轿厢入口的门,由门板、轿门导轨架、轿厢地坎等组成。
层门:设在层站入口的门,又称厅门,由门板、层门导轨架、层门地坎、层门联动机构等组成。
开门机:使轿厢门和层门开启或关闭的装置。
日立电梯培训教材日立YPVF电梯培训教程第一节 YPVF系统的构成一、日立YPVF电梯的特点1、采用交流变频变压调速系统。
2、采用微机控制3、采用数字选层器4、采用串行通信5、把编程器和计算机做在同一块电路板上。
二、YPVF电梯的系统构成YPVF电梯的系统结构如下图所示:1、主回路:由三相整流器、逆变器、充电回路和放电回路组成。
在桥式整流器上加的大容量电容器和RC滤波回路,用来滤波,稳定直流电压。
直流侧设置了放电回路,当电梯制动时会引起直流侧电压的上升,当电压上升到一定值时,可通过硬件回路使反馈三极管自行导通,把反馈的电能消耗在放电电阻上。
在运行接触器10T上并有电阻R1,其作用是在电梯投入运行前,使滤波电容有个预充电,当10T接通电梯投入运行时,避免因电容器瞬间大电流充电产生冲击,保护整流器和滤波电容。
2、主微机:采用M6802芯片,主要功能是负责机房控制柜与轿厢之间串行通信,以取得轿厢的开关信号、呼叫信号、与厅站进行串行通信,以取得厅外召唤信号。
以及进行开关门控制、运行控制、故障检测和记录等。
3、副微机:采用M68000芯片,主要功能是根据主微机的运行指令,负责数字选层器的运算、速度指令生成、矢量控制,进行故障检测和记录,负责信号器工作。
4、电流指令回路:根据副微机矢量控制演算结果,发出三相交流电流指令。
5、电流控制回路:通过将电流指令回路中三相交流电流指令与感应电动机电流反馈信号比较,发出逆变器输出电压指令,比较各种反馈信号,决定指令是否生成。
6、PWM脉宽调制控制电路:产生与逆变器输出三相电压指令对应的基极触发信号。
7、基极驱动电路:根据PWM信号,驱动主回路中逆变器内的大功率晶体管,使晶体管导通。
8、负荷检测装置:检测轿厢负荷并输送负载信号给副微机,以进行起动力矩补偿,使电梯运行平稳。
另外,YPVF系统中还包括:与感应电动机随动,可发送脉冲信号到主、副微机的旋转编码器、传递楼层位置信号的位置检测器FML、可接受指令信号和开关输入信号的轿内操纵箱C.B和厅外召唤箱H.B,以及系统的各种保护装置.YPVF的主微机和副微机之间采用并行通信,共同控制又互相监控。
第二节 YPVF的运行过程1、运行准备当合上电梯动力电源开关后,R、S、T出线端有交流380V电压,控制柜上的电压表VM 应有电压指示,电源指示灯PL亮。
漏电检出器投入工作,如有漏电,99C吸合,其C2、A2点闭合,主开关FFB线圈吸合,使FFB不能合闸。
如无漏电,FFB可以合上,由阻容电路组成的过电压保护电路投入运行。
逆变器的排风扇FAN开始工作。
当三相电源R、S、T进入了整流器CNV后,经整流三相交流电变为直流电,2端为正,3端为负。
由于此时10T处于释放状态,直流电只能通过冲击限流电阻RSH向大电容FILC 充电。
这个预充电功能减少了电梯启动时电流对电网的冲击,也保护了整流器和滤波电容。
此时虽然PM、NA线端有电压,由于逆变器处于关闭状态,所以此时无输出。
当电源开关FFB合上后,变压器TR 1 、TR 2 、TR 4 、TR 6 有电压,各控制回路得电,层楼指示器灯亮,合上控制柜上的轿厢照明开关LIGHT,轿内照明亮,排风扇有电。
此时如果安全系统正常,50B继电器吸合;门处于关闭状态,40D吸合;电梯处于运行准备状态。
2、外呼、开门外呼电源P22A是直流+22V电源,如果轿厢停在一层,乘客按一下一层的向上召唤按钮1U,+22V电源P22A经XH 1-2 ,发光二极管,按钮1U,XH 1-1 接GD22AX;同时经FIO 输入输出板的XH 1-3 接口,经输入缓冲器X711+0输入电脑后使输出缓冲器Z711+0输出保持信号,1层上召唤发光二极管1U发光。
经电脑检索,(1)电梯正在本层的平层位置;(2)电梯处于关门状态;(3)电梯无运行指令;(4)本层有呼梯信号。
则电脑判断为本层开门。
经输出缓冲器Z102输出开门信号并触发FLS导通,直流100V电压经A100→双向可控硅FLS→D1→101N(1,2)→R1→R2→R3→开门机A→门机开关DMCCUT→B100,使门电动机旋转开门。
开门分两个阶段。
第一阶段,电流经R5、D3分流,开门速度较快,第二阶段,开门行程开关14接通,电流经电位器R4的03、14端→14开关,D3与R5并联分流,少部分电流经开门机,开门速度较慢,直到将开门限位撞开,101N吸合,其常闭点(1、2)断开后,开门停止。
3、内选、关门乘客进入轿厢后,如按下5层的指令按钮,电路板上SDC上的直流+22V电源P22C经X511+0输入缓冲器、SDC的FU/14接口,5层按钮、接GD22A。
将轿内呼叫信号输入电脑。
电脑储存并记忆。
输出缓冲器Z511+0输出记忆信号,内选5层的记忆灯亮,经电脑判别定为上方向运行。
经延时或按下关门按钮,经FIO板的Z101输出缓冲器输出关门指令信号。
负100V直流电流B100经门机开关DMCCUT、门电动机A、R3、R2、继电器OZ(1,2)、二极管D2、双向可控硅FLS、A100导通。
门电动机向关门方向旋转。
此时关门电流经D4、开关23、电位器R4的03,23端分流,关门速度较快。
当将关门行程开关24撞到闭合后,分流增大,电梯关门速度减慢。
当将关门停止开关撞开后,OZ释放,其常开点1,2断开,门电动机停止旋转。
4、启动、运行、停车经电脑检测,电梯有方向指令,厅、轿门电气联锁已闭合时,即发出运行信号。
50B↑,40D↑,10T↑,将大功率二极管速度电流直接与逆变器回路接通。
MPU板将给定标准电压送给ACR板,经载频调制后进行脉冲分配,形成六路基极触发电压。
该触发信号经BDC 板传送放大驱动逆变器的六只大功率晶体管工作。
大功率晶体管经U、V、W线端输出调频调压电流,再经电抗器L滤波,变得更加圆滑,再输入到曳引机的线圈,电动机开始启动。
FIO板的32FC/2接口经V15B输出打开抱闸的信号,抱闸继电器15B吸合,抱闸打开,曳引机转动,轿厢上升。
在启动过程中,由于给定标准电压的变化,载波频率也不断变化,电动机的转速随着频率的不断变化而变化。
当启动过程完毕,给定电压稳定在某一数值,频率也相应地稳定在某一数值,电梯即以稳速运行。
在运行过程中,与电梯曳引机同轴的旋转编码器不断发出相应的脉冲数作为速度反馈信号反馈到MPU板与给定电压比较,用来调整电压的频率,使电梯稳速运行。
在运行过中,电脑不断搜寻电梯运行方向的呼梯信号。
当电梯轿厢运行到4层时,电脑已搜寻到5层停站信号。
经一定延时后,MPU电脑输出减速给定电压,电梯开始减速。
当井道中第5层的隔磁板进入平层感应器FML时,电梯进一步减速,并开始计数到预定值时,10T释放,电梯停车。
15B释放,电梯抱闸。
电梯停止以后再抱闸称为零速抱闸,舒适感很好。
停车以后的电梯开门、关门动作与前相同。
5、电梯的检修操作(1)轿内检修操作将轿厢操纵箱上的小盒盖打开,将“检修灯”开关板到下方(检修灯位),这时轿顶和轿底的检修灯应该开亮。
再将“检修”开关扳至下方向(检修位),电梯即为检修运行状态。
检修向上运行:按下操纵箱上最高层的选层按钮,电梯将关门后以检修速度上行。
当电梯到达平层区时,操纵箱上“OPEN”按钮旁的红灯亮,如果这时松开按钮,电梯平层开门。
检修向下运行:按下操纵箱上最低层的选层按钮,电梯将关门后以检修速度下行。
当电梯到达平层区时,操纵箱上“OPEN”按钮旁的红灯亮,如果这时松开按钮,电梯平层开门。
在检修运行中,松开按钮,电梯立即停止。
恢复快车运行状态:在平层区内恢复快车时,将“检修灯”和“检修”开关均板至上方(正常位),电梯即恢复快车状态。
如电梯不在平层区而将上述开关扳至上方时,电梯将自动鸣笛以中速运行到下一层平层位置停梯开门,恢复快车运行。
(2)轿顶检修操作轿顶检修操作须两人配合操作。
将轿厢操纵箱上的开关置在检修状态,一人在厅门外,另一人在轿厢操纵电梯以检修速度向下运行。
当轿顶与厅门地坎基本平齐后,令轿内人员停止运行。
厅外人员用三角钥匙打开厅门,立即将轿顶检修箱上的停止开关扳至“停止”位。
或把轿顶操作开关拔至“轿顶操作”位。
厅外人员进入轿顶后,将“轿顶操作”开关置于轿顶操作位,把“停止”开关置于正常位,把“关门机”开关置于正常位。
关好厅门后,利用操纵盒上的“UP”或“DOWN”按钮即可在轿顶操作电梯以检修速度上行或下行。
当“轿顶操作”开关置于轿顶操作位时,轿内人员操作无效,电梯只能听命于轿顶人员的操作。
在轿顶操作检修时,电梯每运行一次,轿门就要开关一次。
如果不需要轿门每次都开关,可把轿门关好后,再把“关门机”开关置于关门机位。
则轿门就不再打开了。
工作中,如遇紧急情况可将轿顶操作箱的“停止”开关或操纵盒上的“停止”开关扳下,使电梯停止。
(3)机房检修操作将轿内操纵箱上小盒内各开关置于正常位,在电梯停止状态时,操作MPU电子板上的按钮来进入检修状态。
进入检修的操作方法:依次按 MODE-3-SET电梯即进入检修状态。
如再按(7),电梯关门,低速上升。
松开电梯即停止,开门。
如再按(4),电梯关门,低速下降。
松开电梯即停止,开门。
退出检修的操作方法:依次按 MODE-3-RESET电梯就恢复自动运行状态。
第三节 YPVF的数字选层器原理1、旋转编码器旋转编码器与电动机同轴连接,随电动机的转动,产生脉冲信号输出,以此可以检测运行距离。
输出脉冲送微机的转速检测回路。
可以检测运行方向,先行距离及减速距离。
2、怎样利用旋转编码器判断运行方向旋转编码器每一转产生1024个脉冲,采用两相检测,两相相差90度,因此可以判断轿厢是上行还是下行。
由图可见,由两个JK触发器及非门构成方向判断,结果送PIA。
由PTM进行脉冲计数。
电梯下行时,φB超前φA90度。
上行时,φB滞后φA90度。
当F为高电平时,表示电梯下行。
当E为高电平时,表示电梯上行。
3、数字选层器由旋转编码器就能取得电梯的位置信号,要完成选层器的功能,应弄清以下几个概念:(1)同步位置反映电梯在井道中的实际位置,以最底层厅门地坎平面作为计算起点。
电梯运行时,不断接收旋转编码器发来的脉冲,上行为增计数,下行为减计数。
计算数值就是同步位置的数值。
(2)层高表电梯安装完成后必须进行层高测定,即把两层厅门地坎之间测得的编码器脉冲数值存入相应的层高表。
(3)同步层由同步位置和层高表可计算出同步层。
同步层用于层楼显示,已响应的轿内指令和厅外召唤信号的消号,运行方向的选择等。
轿厢到达每两层中点时,同步层加1(上行时)或减1(下行时)。
(4)先行位置先行位置由层高表、同步层及先行距离速度码决定。
速度指令发生后,加速开始,速度按级递增,V1、V2、V3…Vn。
由于为加速运行,随速度提高,每级的运行距离不同,为了避免重复计算,将这些距离编成表格存于微机内,对应的运行距离为S1、S2、S3…Sn。