自动控制原理 第一章(2015)汇总
- 格式:ppt
- 大小:21.64 MB
- 文档页数:8
第1章习题参考答案1-1 自动控制系统通常由哪些环节组成?它们在控制过程中担负什么功能?解:见教材P4-1-2 试比较开环控制系统和闭环控制系统的优缺点。
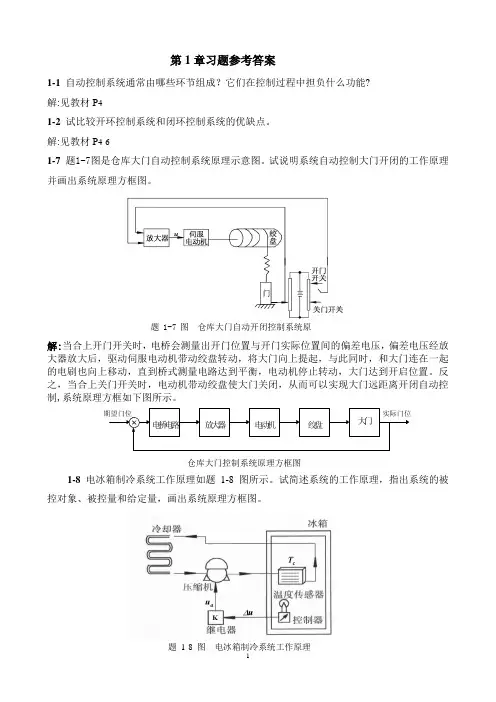
解:见教材P4-61-7题1-7图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理并画出系统原理方框图。
解:当合上开门开关时,电桥会测量出开门位置与开门实际位置间的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起,与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制,系统原理方框如下图所示。
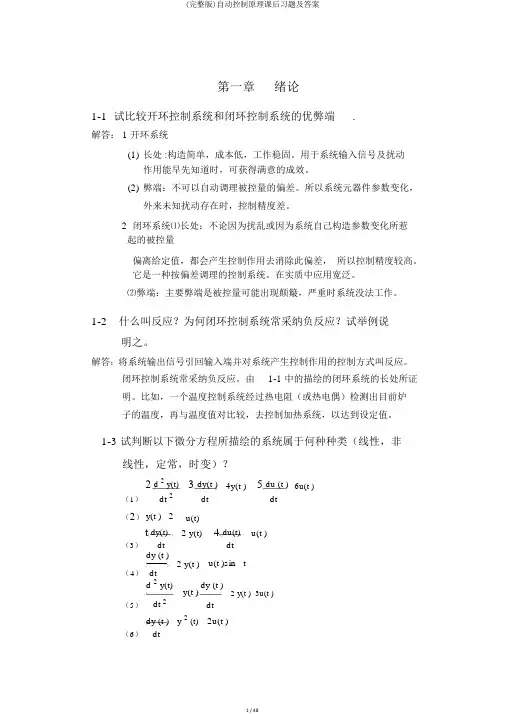
电桥电路放大器电动机绞盘大门_期望门位实际门位仓库大门控制系统原理方框图1-8 电冰箱制冷系统工作原理如题1-8图所示。
试简述系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统原理方框图。
题1-8图电冰箱制冷系统工作原理题1-7图仓库大门自动开闭控制系统原解: 电冰箱制冷系统结构如下图电冰箱制冷系统结构图系统的控制任务是保持冰箱内温度c T 等于给定温度r T 。
冰箱体是被控对象;箱内温度是被控量,希望的温度r T 为给定量(由电位器的输出电压r U 对应给出);继电器、压缩机、蒸发器、冷却器所组成制冷循环系统起执行元件的作用。
温度控制器中的双金属温度传感器(测量元件)感受冰箱内的温度并转换为电压信号c U ,与控制器旋钮设定的电位器输出电压r U (对应于希望温度r T )相比较,构成偏差电压c r U U U -=∆(表征希望温度与实际温度的偏差),控制继电器K 。
当U ∆大到一定值时,继电器接通,压缩机启动,将蒸发器中的高温低压制冷剂送往冷却器散热,降温后的低温低压制冷剂被压缩成低温高压液态进入蒸发器,急速降压扩展成气体,吸收箱体内的热量,使箱体的温度下降;而高温低压制冷剂又被吸入冷却器。

第一章绪论(6学时)
微型计算机发展概况、数制和码制。
第二章 8086 系统结构(8学时)
8086CPU结构、8086CPU的引脚及其功能、8086存储器组织、8086系统配置、8086CPU 时序。
第三章 8086的寻址方式和指令系统(10学时)
8086的寻址方式、指令的机器码表示方法、8086的指令系统。
第四章汇编语言程序设计(10学时)
汇编语言程序格式、MASM中的表达式、伪指令语句、程序设计方法、DOS系统功能调用。
第五章存储器(6学时)
存储器分类、随机存取存储器RAM、只读存储器ROM、CPU与存储器的连接。
第六章 I/O接口和总线(6学时)
I/O接口的功能、简单的输入输出芯片、I/O端口及其编址方式、I/O端口地址译码、CPU 与外设间的数据传送方式。
第七章可编程外围接口芯片8255A及应用(4学时)
8255A的结构和功能、8255A的控制字及初始化编程、8255A工作方式和C口状态字、8255A的应用举例。
第八章可编程计数器/定时器8253及应用(4学时)
8253的内部结构与引脚信号、8253的初始化编程、8253的工作方式、8253与系统的连接、8253的应用举例。
第九章微型计算机中断系统(8学时)
中断处理过程、中断优先级和中断嵌套、可编程中断控制器8259A。
第十章 A/D、D/A转换(6学时)
A/D转换器工作原理、D/A转换器工作原理、转换器与CPU连接。
第十一章高档微处理器(6学时)
CPU内部结构、管脚信号说明、寄存器组成。
第一章绪论1-1 试比较开环控制系统和闭环控制系统的优弊端.解答: 1 开环系统(1)长处 :构造简单,成本低,工作稳固。
用于系统输入信号及扰动作用能早先知道时,可获得满意的成效。
(2)弊端:不可以自动调理被控量的偏差。
所以系统元器件参数变化,外来未知扰动存在时,控制精度差。
2闭环系统⑴长处:不论因为扰乱或因为系统自己构造参数变化所惹起的被控量偏离给定值,都会产生控制作用去消除此偏差,所以控制精度较高。
它是一种按偏差调理的控制系统。
在实质中应用宽泛。
⑵弊端:主要弊端是被控量可能出现颠簸,严重时系统没法工作。
1-2什么叫反应?为何闭环控制系统常采纳负反应?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反应。
闭环控制系统常采纳负反应。
由1-1 中的描绘的闭环系统的长处所证明。
比如,一个温度控制系统经过热电阻(或热电偶)检测出目前炉子的温度,再与温度值对比较,去控制加热系统,以达到设定值。
1-3试判断以下微分方程所描绘的系统属于何种种类(线性,非线性,定常,时变)?2 d 2 y(t)3 dy(t ) 4y(t ) 5 du (t ) 6u(t )(1)dt 2 dt dt(2) y(t ) 2 u(t)(3)t dy(t) 2 y(t) 4 du(t) u(t ) dt dtdy (t )u(t )sin t2 y(t )(4)dtd 2 y(t)y(t )dy (t ) (5)dt 2 2 y(t ) 3u(t )dt(6)dy (t ) y 2 (t) 2u(t ) dty(t ) 2u(t ) 3du (t )5 u(t) dt(7)dt解答: (1)线性定常(2)非线性定常 (3)线性时变(4)线性时变(5)非线性定常(6)非线性定常(7)线性定常1-4 如图 1-4 是水位自动控制系统的表示图, 图中 Q1,Q2 分别为进水流量和出水流量。
控制的目的是保持水位为必定的高度。
完整版)自动控制原理知识点汇总自动控制原理总结第一章绪论在自动控制中,被控对象是要求实现自动控制的机器、设备或生产过程,而被控量则是表征被控对象工作状态的物理参量或状态参量,如转速、压力、温度、电压、位移等。
控制器是由控制元件组成的调节器或控制装置,它接受指令信号,并输出控制作用信号于被控对象。
给定值或指令信号r(t)是要求控制系统按一定规律变化的信号,是系统的输入信号。
干扰信号n(t)又称扰动值,是一种对系统的被控量起破坏作用的信号。
反馈信号b(t)是指被控量经测量元件检测后回馈送到系统输入端的信号。
偏差信号e(t)是指给定值与被控量的差值,或指令信号与反馈信号的差值。
闭环控制的主要优点是控制精度高,抗干扰能力强。
但是使用的元件多,线路复杂,系统的分析和设计都比较麻烦。
对控制系统的性能要求包括稳定性、快速性和准确性。
稳定性和快速性反映了系统的过渡过程的性能,而准确性则是衡量系统稳态精度的指标,反映了动态过程后期的性能。
第二章控制系统的数学模型拉氏变换是一种将时间域函数转换为复频域函数的数学工具。
单位阶跃函数1(t)、单位斜坡函数、等加速函数、指数函数e-at、正弦函数sinωt、余弦函数cosωt和单位脉冲函数(δ函数)都有其典型的拉氏变换。
拉氏变换的基本法则包括线性法则、微分法则、积分法则、终值定理和位移定理。
传递函数是线性定常系统在零初始条件下,输出信号的拉氏变换与输入信号的拉氏变换之比,称为系统或元部件的传递函数。
动态结构图及其等效变换包括串联变换法则、并联变换法则、反馈变换法则、比较点前移“加倒数”和比较点后移“加本身”,以及引出点前移“加本身”和引出点后移“加倒数”。
梅森公式是一种求解传递函数的方法,典型环节的传递函数包括比例(放大)环节、积分环节、惯性环节、一阶微分环节、振荡环节和二阶微分环节。
第三章时域分析法时域分析法是一种分析控制系统时域特性的方法。
其中,时域响应包括零状态响应和零输入响应。
自动控制原理(普通高等教育十一五国家级规划教材)目录-------------------------------------------------------------------------------- 第一章自动控制概述1.1引言1.2自动控制系统的初步概念1.3自动控制系统的分类1.3.1开环控制和闭环控制1.3.2伺服系统.定值控制系统和程序控制系统1.3.3控制系统的其他类型1.4控制系统的组成及对控制系统的基本要求1.4.1控制系统的基本组成1.4.2对控制系统的基本要求习题第二章系统的数学模型2.1控制系统微分方程的建立2.2传递函数2.2.1传递函数的定义2.2.2关于传递函数的几点说明2.2.3基本环节及其传递函数2.2.4电气网络的运算阻抗与传递函数2.3控制系统的框图和传递函数2.3.1框图的概念和绘制2.3.2框图的变换规则2.3.3闭环系统的传递函数2.3.4框图的化简2.3.5梅森增益公式2.3.6机电装置的传递函数2.4非线性方程的线性化习题第三章控制系统的时域分析法3.1引言3.1.1典型输入信号3.1.2单位冲激响应3.1.3系统的时间响应3.1.4时间响应的性能指标3.2一阶系统的时域分析3.2.1一阶系统的单位阶跃响应3.2.2一阶系统的单位斜坡响应3.2.3单位冲激响应3.3二阶系统的时域分析3.3.1二阶系统的典型形式3.3.2二阶系统的单位阶跃响应3.3.3二阶欠阻尼系统的动态性能指标3.3.4二阶系统计算举例3.3.5二阶系统的单位冲激响应3.3.6二阶系统的单位斜坡响应3.3.7初始条件不为零时二阶系统的时间响应3.4高阶系统的时间响应概述3.5控制系统的稳定性3.5.1稳定的概念3.5.2线性定常系统稳定的充分必要条件3.5.3劳思稳定判据3.6控制系统的稳态误差3.6.1稳态误差的基本概念3.6.2利用终值定理求稳态误差3.6.3系统的型别与参考输入的稳态误差3.6.4扰动信号的稳态误差3.6.5动态误差系数法3.7复合控制3.7.1按输入补偿的复合控制3.7.2按扰动补偿的复合控制习题第五章频率特性法5.1频率特性的初步概念5.2频率特性的图形5.2.1极坐标图5.2.2对数频率特性图5.2.3最小相位系统5.2.4Nichols图5.3Nyquist稳定判据5.3.1完整的频率特性极坐标图5.3.2Nyquist稳定判据5.3.3用开环伯德图判定闭环稳定性5.4控制系统的相对稳定性5.4.1相位裕度5.4.2幅值裕度5.5闭环频率特性图5.5.1闭环频率特性图5.5.2等M圆5.5.3非单位反馈系统的闭环频率特性5.6频率特性与控制系统性能的关系5.6.1控制系统的性能指标5.6.2二阶系统性能指标间的关系5.6.3高阶系统性能指标间的关系5.6.4开环对数幅频特性与性能指标间的关系5.7控制系统设计的初步概念5.8PID控制器简述5.8.1比例(P)控制器5.8.2比例微分(PD)控制器5.8.3积分(I)控制器5.8.4比例积分(PI)控制器5.8.5比例积分微分(PID)控制器5,9超前补偿5.9.1超前补偿网络的特性5.9.2超前补偿网络设计5.10滞后补偿5.10.1滞后补偿网络的特性5.10.2滞后补偿网络设计5.11滞后超前补偿..5.11.1滞后超前网络的特性5.11.2补偿原理与设计步骤5.12串联补偿网络的期望幅频特性设计方法5.13反馈补偿5.13.1反馈的功能5.13.2反馈补偿网络的设计5.14电子放大器的数学模型与补偿方法5.14.1电子放大器的数学模型5.14.2放大器的内部补偿5.14.3放大器的外部补偿习题。
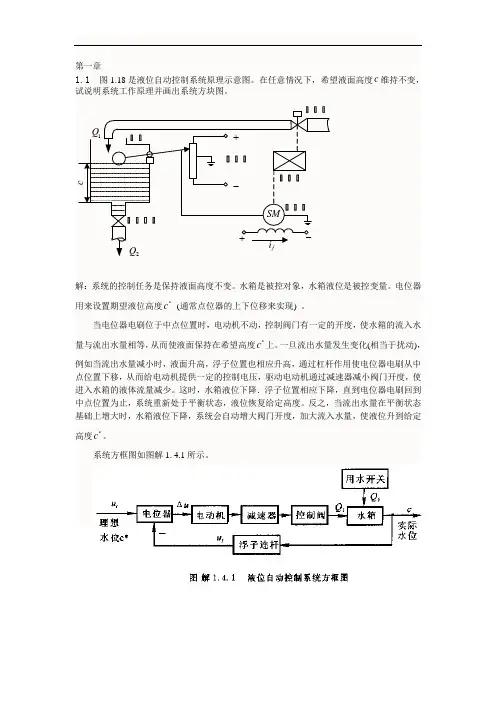
第一章1.1 图1.18是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c维持不变,试说明系统工作原理并画出系统方块图。
c+-SM___ 1Q浮浮浮浮浮浮2Q浮浮浮浮浮浮浮浮浮浮浮浮fi-+解:系统的控制任务是保持液面高度不变。
水箱是被控对象,水箱液位是被控变量。
电位器用来设置期望液位高度*c(通常点位器的上下位移来实现) 。
当电位器电刷位于中点位置时,电动机不动,控制阀门有一定的开度,使水箱的流入水量与流出水量相等,从而使液面保持在希望高度*c上。
一旦流出水量发生变化(相当于扰动),例如当流出水量减小时,液面升高,浮子位置也相应升高,通过杠杆作用使电位器电刷从中点位置下移,从而给电动机提供一定的控制电压,驱动电动机通过减速器减小阀门开度,使进入水箱的液体流量减少。
这时,水箱液位下降.浮子位置相应下降,直到电位器电刷回到中点位置为止,系统重新处于平衡状态,液位恢复给定高度。
反之,当流出水量在平衡状态基础上增大时,水箱液位下降,系统会自动增大阀门开度,加大流入水量,使液位升到给定高度*c。
系统方框图如图解1. 4.1所示。
1.2恒温箱的温度自动控制系统如图1.19所示。
(1) 画出系统的方框图;(2) 简述保持恒温箱温度恒定的工作原理;(3) 指出该控制系统的被控对象和被控变量分别是什么。
M放大器电机减速器调压器 220~热电偶电阻丝- +- +图1.19 恒温箱的温度自动控制系统解:恒温箱采用电加热的方式运行,电阻丝产生的热量与调压器电压平方成正比,电压增高,炉温就上升。
调压器电压由其滑动触点位置所控制,滑臂则由伺服电动机驱动.炉子的实际温度用热电偶测量,输出电压作为反馈电压与给定电压进行比较,得出的偏差电压经放大器放大后,驱动电动机经减速器调节调压器的电压。
在正常情况下,炉温等于期望温度T ,热电偶的输出电压等于给定电压。
此时偏差为零,电动机不动,调压器的滑动触点停留在某个合适的位置上。

自动控制原理知识点总结第一章1、自动控制:是指在无人直接参与的情况下,利用控制装置操纵受控对象,是被控量等于给定值或按给定信号的变化规律去变化的过程。
2、被控制量:在控制系统中.按规定的任务需要加以控制的物理量。
3、控制量:作为被控制量的控制指令而加给系统的输入星.也称控制输入。
4、扰动量:干扰或破坏系统按预定规律运行的输入量,也称扰动输入或干扰掐入。
5、反馈:通过测量变换装置将系统或元件的输出量反送到输入端,与输入信号相比较。
反送到输入端的信号称为反馈信号。
6、负反馈:反馈信号与输人信号相减,其差为偏差信号。
7、负反馈控制原理:检测偏差用以消除偏差。
将系统的输出信号引回插入端,与输入信号相减,形成偏差信号。
然后根据偏差信号产生相应的控制作用,力图消除或减少偏差的过程。
8、自动控制系统的两种常用控制方式是开环控制和闭环控制。
9、开环控制:控制装置与受控对象之间只有顺向作用而无反向联系特点:开环控制实施起来简单,但抗扰动能力较差,控制精度也不高。
10、闭环控制:控制装置与受控对象之间,不但有顺向作用,而且还有反向联系,既有被控量对被控过程的影响。
主要特点:抗扰动能力强,控制精度高,但存在能否正常工作,即稳定与否的问题。
11、控制系统的性能指标主要表现在:(1)、稳定性:系统的工作基础。
(2)、快速性:动态过程时间要短,振荡要轻。
(3)、准确性:稳态精度要高,误差要小。
12、实现自动控制的主要原则有:主反馈原则、补偿原则、复合控制原则。
第二章1、控制系统的数学模型有:微分方程、传递函数、动态结构图、频率特性。
2、传递函数:在零初始条件下,线性定常系统输出量的拉普拉斯变换域系统输入量的拉普拉斯变换之比3、求传递函数通常有两种方法:对系统的微分方程取拉氏变换,或化简系统的动态方框图。
对于由电阻、电感、电容元件组成的电气网络,一般采用运算阻抗的方法求传递函数。
4、结构图的变换与化简化简方框图是求传递函数的常用方法。
自动控制原理第一章一、自动控制系统的概念自动控制系统是指通过测量被控对象的状态或输出,并根据一定规律进行比较、判断及输出控制量的系统。
该系统可以根据实际需要分为闭环控制和开环控制两种方式。
闭环控制系统通过比较实际输出量和期望输出量之间的差异,自动调整控制量以使实际输出量达到期望值。
开环控制系统不考虑实际输出量与期望值之间的差异,只根据一定规律输出控制量。
二、自动控制系统的组成自动控制系统主要由被控对象、传感器、执行器、控制器和控制对象组成。
被控对象是需要被控制系统改变状态或输出的物理元件或过程。
传感器用于将被控对象的状态或输出转换为电信号。
执行器接收控制器输出的信号,并将其转换为被控对象状态或输出的改变。
控制器接收传感器输出的信号,并根据一定的算法对其进行处理和判断,然后输出控制信号。
控制对象是指需要控制的系统或过程。
三、自动控制系统的特点自动控制系统具有以下几个基本特点:1.反馈调节:通过传感器和执行器之间的反馈回路来实现系统的调节和稳定。
2.误差纠正:系统的输出与期望输出之间的差异会被控制器捕捉到,从而对控制信号进行修正。
3.自适应性:系统能够根据外部环境变化自动调整控制参数以适应不同工况要求。
4.稳定性:系统能够稳定工作,在一定误差范围内输出可控的状态或输出。
5.灵敏性:系统对输入信号的变化有较强的响应能力,能够及时调整控制量以保持系统稳定。
6.自动化程度高:系统能够自动地完成输入参量的检测、判决和输出控制信号的过程。
总结起来,自动控制原理第一章详细介绍了自动控制系统的概念、组成和基本特点。
了解自动控制系统的概念和特点对于深入理解后续章节的内容非常重要,为后续学习打下了良好的基础。
了解了自动控制系统的组成,可以更好地理解控制系统中各个组成部分的功能和相互关系。
同时,该章节还介绍了自动控制系统的特点,使我们对自动控制系统的工作原理和优势有了更深入的认识。
第一章绪论1.机械系统:以实现一定的机械运动、输出一定的机械能和承受一定的机械载荷为目的。
激励(输入):外界与系统的作用,如作用力(载荷)。
分为控制输入和扰动输入。
响应(输出):系统由于激励作用而产生的变形或位移。
2.机械工程控制论的研究对象和任务是什么?机械工程控制论实质上是研究机械工程中广义系统的动力学问题。
具体地说,是广义系统在一定的外界条件作用下,从系统的一定的初始状态出发,所经历的由其内部的固有特性所决定的整个动态历程,研究系统与其输入、输出三者之间的动态关系。
从系统、输入、输出三者之间的关系出发,根据已知条件与求解问题的不同,机械控制工程论的任务可以分为以下五个方面:(系统分析问题)已知系统和输入,求系统的输出。
(最优控制问题)已知系统和理想输出,设计输入。
(最优设计问题)已知输入和理想输出,设计系统(滤波与预测问题)已知输出,确定系统,以识别输入或输出中的有关信息。
(系统辨识问题)已知输入和输出,求系统的结构与参数。
3.控制系统的基本要求(稳、准、快)稳定性:动态过程的振荡倾向和系统能够恢复平衡状态的能力。
稳定性是系统工作的首要条件。
准确性:在调整过程结束后输出量与给定的输入量之间的偏差。
衡量系统工作性能的重要指标。
快速性:系统输出量与希望值之间产生偏差时,消除这种偏差的快速程度。
控制的三要素:控制对象、控制目标、控制手段。
控制论的两个核心:信息和反馈需要解决的两大基本问题:控制系统的分析和控制系统的设计。
4.反馈:将系统的输出以一定的方式返回到系统的输入端并共同作用于系统的过程。
内反馈:系统或过程中存在的各种自然形成的反馈。
内反馈是造成机械系统存在动态特性的根本原因。
外反馈:在自动控制系统中,为达到某种控制目的而人为加入的反馈。
正反馈:能使系统的绝对值增大的反馈。
负反馈:能使系统的绝对值减小的反馈。
5.自动控制的本质:闭环自动控制系统的工作过程就是一个“检测偏差并纠正偏差”的过程。