自走式红枣收获机的设计
- 格式:doc
- 大小:1.47 MB
- 文档页数:27

红枣自动分级机构的设计(含全套CAD图纸)机械设计 36396305摘要针对我国西部红枣分级劳动强度大、机械化程度低的现状,设计了带式红枣自动分级机。
该分级机的设计思路为:小于分级皮带之间间隙的枣便落进出枣斗进入集枣箱,不会出现卡枣、破枣现象。
留在一级分级皮带上的红枣由后面的溜枣板迸入下一级差速带式红枣分级装后一级的皮带间的间隙大于上级的间隙,故落下的红枣大于上一级的红枣,依此将红枣分置,成大小不同的级别。
关键词:红枣;分级;皮带;设计AbstractIn view of the present situation of western red dates grading large labor intensity, low degree of mechanization, design the belt red dates automatic classifier. Design ideas of the classifier: less than gapgraded belt between the date falls into the collection bucket import jujube jujube box, no card jujube, jujube breaking phenomenon. In a classification on the belt red dates by Liu jujube board burst back into a differential type red dates and grading device speed belt, a belt gap between more than the gap, so the falling red dates than on the level of the red dates, red dates can be divided into different levels of size.Keywords: red dates; classification; belt; design目录1.研究目的与意义...................................................................... .. (1)1.1研究目的...................................................................... (1)1.2研究的意义 ..................................................................... ................................................... 1 2.国内外研究现状...................................................................... .. (2)2.1国外研究现状 ..................................................................... .. (2)2.2国内研究现状 .................................................................................................................... 2 3.主要结构 ..................................................................... .. (3)4.工作原理 ..................................................................... .. (3)4.1分级装置...................................................................... (3)4.2分级装置设计依据 ..................................................................... ....................................... 4 5.主要技术参数 ..................................................................... (5)6.主要部件的设计...................................................................... .. (5)6.1电动机的选择 ..................................................................... .. (5)6.2联轴器的选择 ..................................................................... .. (6)6.3分配传动装置传动比和减速器的选择 ..................................................................... . (7)6.4 传动装置的运动和动力参数计算 ..................................................................... .. (8)7. 其他部件的设计...................................................................... . (10)7.1入料斗...................................................................... .. (10)7.2出料斗...................................................................... .. (10)7.3机架底座...................................................................... .................................................... 11 总结 ..................................................................... .........................................................................12致谢 ..............................................................................................................................................13参考文献 ..................................................................... . (14)塔里木大学毕业设计 1 研究目的与意义1.1研究目的红枣又名大枣,含有丰富的营养成分。

小型自走气吸式红枣捡拾机的设计及试验庄子豪1,袁盼盼1,韩长杰1,张㊀静1,高㊀杰2(1.新疆农业大学机电工程学院,乌鲁木齐㊀830052; 2.新疆中收农牧机械有限公司,乌鲁木齐㊀830013)摘㊀要:针对新疆红枣人工收获劳动强度大㊁效率低等问题,设计了一种自走型气吸式红枣捡拾机,实现对落地红枣的捡拾㊁除杂等功能㊂通过对落地红枣㊁枣叶等进行悬浮特性测定,得到红枣悬浮速率为12.45~23.69m/ s,枣叶悬浮速率不超过4m/s㊂利用气吸管进㊁出气口动压损失,计算出气吸管进气口必要的风速条件,确定了沉降室的进风口和沉枣腔尺寸㊂田间试验结果表明,当风机转速为2900r/min时,收获率ȡ98.3%,破损率ɤ3.83%,含杂率ɤ3.02%㊂关键词:落地红枣;捡拾机;自走气吸式中图分类号:S225.93㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2021)08-0080-040㊀引言红枣原产地中国,鼠李科枣属植物[1],在我国已有7000年多历史,期间相继传入欧洲㊁印度㊁美洲[2]㊂目前,国内红枣主要在华北㊁中原地区及新疆维吾尔自治区种植[3]㊂随着全疆推动特色林果产业发展,使得红枣种植面积迅速扩大[4-5]㊂据调研,新疆人工采收红枣劳动强度大,收获效率低,收获成本达到平均0.8元/kg[6],收获期又与其它需要人工收获的经济作物重叠,导致雇佣劳动力困难,红枣不能及时收获,损失明显[7]㊂红枣机械化收获能够有效推动红枣产业发展,使农民获得更好的效益㊂1㊀整机结构及工作原理1.1㊀整机结构气吸式红枣捡拾机具主要由气吸软管㊁沉降室㊁闭风装置㊁离心风机㊁柴油机㊁筛板及行走装置等部分组成,如图1所示㊂主要设计技术参数如表1所示㊂1.2㊀工作原理作业前,将集果箱放置在筛板下方,完成收获前准备工作㊂作业时,一人手持气吸管对落地红枣进行捡拾;红枣经过吸枣管进入沉降室,由闭风装置将红枣输送至筛板后落入集果箱;小质量杂质(如杂草㊁树收稿日期:2019-12-25基金项目:新疆维吾尔自治区重点研发计划项目(2017B01002-2)作者简介:庄子豪(1994-),男,乌鲁木齐人,硕士研究生,(E-mail) zzh152@㊂通讯作者:韩长杰(1980-),男,河南遂平人,教授,博士,(E-mail)hcj _627@㊂叶等)由杂质导向滚轮输送至沉降室后部,部分杂质经离心风机吹出,其他杂质通过手动打开下排杂门排出㊂样机装有4个12V蓄电池,其中1个给柴油机启动器供电,1个为低速电机提供动力,2个给后驱动桥提供动力㊂行走时,转向握把上设有前后行进开关及油门,可控制机具在田间行走的方向和速度㊂1.低速电机㊀2.闭风装置㊀3.红枣导向板㊀4.沉降室密封盖5.杂质导向滚轮㊀6.沉降室㊀7.离心风机㊀8.柴油机9.蓄电池㊀10.后轮11.机架㊀12.万向轮㊀13.筛板14.转向握把㊀15.气吸管㊀16下排杂门图1㊀小型气吸式红枣捡拾机结构示意简图Fig.1㊀Jujube pickup structure schematic diagram表1㊀红枣捡拾机主要设计技术参数Table1㊀Main design technical parameters of jujube picking machine 项目单位设计参数或形式结构形式自走式配套发动机额定功率kW7.7配套发动机额定转速r/min3600续表1项目单位设计参数或形式整机质量kg320外形尺寸(长ˑ宽ˑ高)mm2360ˑ1030ˑ1530后轮轮距/mm8152㊀主要工作部件的设计2.1㊀风机选型在农业机械上常采用通用型和清粮型风机进行通风㊁分选㊁清洁和输送各种物料[8-9]㊂本机选用4-72型离心风机,叶片数量Z=6,单侧进风,参数如表2所示㊂表2㊀4-72型离心风机技术参数Table2㊀Technical parameters of model4-72centrifugal fan项目单位参数机号No.4A功率kW 5.5转速r/min2900流量m3/h4012~7419全压Pa1320~20142.2㊀沉降室外壳设计2.2.1㊀沉降室工作原理气吸式红枣捡拾机的沉降室用于将吸入红枣与小质量杂质(如树叶㊁杂草等)分离,其内部结构如图2所示㊂1.沉枣腔㊀2.下挡板㊀3.沉降室进风口㊀4.红枣导向板5.沉降室密封盖㊀6.杂质导向滚轮㊀7.沉杂腔8.沉降室出风口㊀9.下排杂门图2㊀沉降室内部结构示意图Fig.2㊀Structural diagram of settlement chamber沉降室分为沉枣腔和沉杂腔两部分㊂工作时,红枣由沉降室进风口吸入,沉降室内的红枣被红枣导向板挡下,落入闭风器;枣叶㊁树枝等杂质进入沉杂腔中,部分轻质杂质由沉降室出风口排出;剩余杂质沉积在沉杂腔下部,待手动打开下排杂门时将其排出,实现红枣沉降㊁除杂㊁排杂工作㊂2.2.2㊀基本参数设计1)红枣悬浮特性试验㊂抽取收获期落地红枣100个,随机平均分成5组进行悬浮特性试验㊂由于红枣形状为类椭球体,在气力推动过程中存在翻滚的情况,因此试验过程需要同时记录其最大和最小悬浮速率[11]㊂试验结果如表3所示㊂表3㊀红枣物料悬浮速率Table3㊀Test results of jujube material m/s 组别最小悬浮速率最大悬浮速率112.9320.92213.8621.79314.5521.62414.9823.69512.4519.07㊀㊀2)气吸管工作状态风速计算㊂为了使得落地红枣顺利被吸入沉降室,不仅需要得到其悬浮速率,还需考虑气吸管中的压力损失,以保证对红枣的输送功能㊂气吸管作业基本形态示意图如图3所示㊂其中,气吸管左侧末端为出气口,右侧为进气口㊂图3㊀气吸管作业基本形态示意图Fig.3㊀Schematic diagram of basic configuration of air suction work计算气吸管动压及风阻时,可将其拆分为两段直管与两段90ʎ弯管,总长为3.2m㊂管道第Ⅰ段及第Ⅲ段的风阻属于局部流量不改变时产生的局部阻力㊂根据表3,红枣的悬浮速率为24m/s,由于红枣被吸起后需要被气流输送至一定高度,因此其输送气流速率应该是悬浮速率的110%~130%[12],即气吸管出气口风速不小于26.4m /s㊂气吸管Ⅰ㊁Ⅲ段中局部风阻计算式为P =ξv 2ρ2(1)式中㊀P 压力损失(Pa);㊀ξ 管道固有的阻力系数;㊀v 风管内空气的平均流速(m /s);㊀ρ 空气的密度,ρ=1.2kg /m 3㊂首先计算气吸管进气口空气流速v 0,即v 12ρ2+ξ1v 2ρ2+ξ3v 2ρ2=v 02ρ2(2)式中㊀v 1 气吸管出气口风速,v 1=26.4m /s;㊀v 0 气吸管进气口风速(m /s);㊀ξ1 第Ⅰ段管道的阻力系数,ξ1=0.16;㊀ξ3 第Ⅲ段管道的阻力系数,ξ3=0.054㊂由此得出:v 0=32.56m /s㊂试验得到枣叶㊁田间树枝悬浮速率小于4m /s,同理输送枣叶㊁树枝的气流速率不小于4.4m /s㊂由式(2)计算得知:气吸管进气口速度至少为32.56m /s,符合物料气力输送要求㊂3)沉降室尺寸设计㊂沉降室分为沉枣腔和沉杂腔两部分:沉枣腔应尽量只落红枣,而杂质被风力输送至沉杂腔排出㊂由表3可知:沉枣腔风速应低于12m /s,高于4m /s㊂本机取枣叶㊁树枝的输送气流速度作为沉枣腔设计依据,故沉枣腔横截面积扩大到沉降室进风口的6倍,使得红枣完全沉降,除杂效果好㊂沉降室进风口与沉枣腔连接方式设计成 凸 状,可以使风压不因管道横截面积变化而损失[13-14]㊂4)杂质导向滚轮的设计㊂为避免树枝㊁杂草等轻质物堵塞沉枣腔与沉杂腔连通处,设计1个杂质导向滚轮,由低速电机提供动力匀速转动,结构如图4所示㊂图4㊀杂质导向滚轮结构示意图Fig.4㊀Structure diagram of impurity guide roller杂质导向滚轮由轴及若干圆环片组成㊂为了使得树枝㊁杂草更容易被运送至沉杂腔,部分圆环片上设有若干凸起㊂轴转动速度通过前期试验调整,确定转速ωɤ60r /min 时红枣不会被滚轮带至沉杂腔中㊂此时,同风速下沉枣腔及集果箱中的杂质质量占比较小,除杂效果较好㊂3㊀田间试验3.1㊀试验条件试验地选择吐鲁番市托克逊县枣园,其地理位置为42ʎ46ᶄ7ᵡN㊁88ʎ41ᶄ32ᵡE,如表4所示㊂表4㊀试验地条件Table 4㊀Test site on test day项目单位参数时间2018-10-02当日气温ħ15~30试验期间气温ħ24空气湿度%21株距m 2行距m 4树龄年8㊀㊀图5为样机作业情况㊂图5㊀红枣样机田间试验情况Fig.5㊀Field experiment of jujube prototype3.2㊀试验方法本次田间试验选择了红枣的收获率㊁破损率㊁含杂率3个性能指标进行测试,同时对整机各部分工作性能进行考察㊂收获率是指样机吸起并收集至集果箱中的红枣与所有试验范围内红枣的质量比;破损率是计算由本机作业时损伤的红枣与收获总红枣净重的比值㊂随机在果园选取5行作为试验地,每组行走20m距离,风机转速达到2900r /min,由单人操作样机完成红枣气吸捡拾作业㊂3.3㊀试验结果表5所示为红枣捡拾试验结果㊂由表5可知:气吸式红枣捡拾机能够完成对落地红枣捡拾㊁除杂工作,满足作业要求;风机转速为2900r /min 时,收获率ȡ98.3%,破损率ɤ3.83%,含杂率ɤ3.02%,符合预期作业效果,且鲜枣破损率符合国家标准[15]㊂2021年8月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第8期表5㊀样机田间试验结果Table5㊀Field test results of machine试验号收获率/%破损率/%含杂率/%落地红枣含水率/%作业效率/m3㊃h-1 198.3 3.83 1.3435.95233 297.8 2.12 2.6134.78200 398.9 2.25 1.8836.25273 4100 3.72 3.0234.12167 598.5 1.64 2.3133.62247平均值98.7 2.71 2.2334.952404㊀结论1)对红枣悬浮特性进行试验,设计出适合收获落地红枣使用的沉降室㊂样机具有捡拾㊁除杂及集果等功能㊂2)试验表明:红枣收获率大于98.3%,破损率低于3.83%,含杂率低于3.02%,均满足实际生产要求㊂参考文献:[1]㊀胡灿,鲁兵,侯书林,等.新疆红枣收获机械的研究现状与发展对策[J].中国农机化学报,2016,37(7):222-225, 240.[2]㊀曲泽洲,武元苏.关于枣的栽培起源问题[J].北京农学院学报,1983(00):1-5.[3]㊀陈光,王伟,杨丙辉.红枣空气动力学特性与风筛清选试验研究[J].林业机械与木工设备,2016,44(5):16-19. [4]㊀梁鸿.中国红枣及红枣产业的发展现状㊁存在问题和对策的研究[D].西安:陕西师范大学,2006.[5]㊀阿布力孜㊃布力布力.新疆红枣发展现状㊁竞争力分析与战略对策[J].山西果树,2012(4):46-48.[6]㊀范修文,张宏,李传峰,等.新疆红枣收获机械现状及发展建议[J].新疆农机化,2013(06):40-41.[7]㊀刘孟军.中国红枣产业的现状与发展建议[J].果农之友,2008(3):3-4,26.[8]㊀李宝筏.农业机械学[M].北京:中国农业出版社.1981.[9]㊀刘四麟.粮食工程设计手册[K].郑州:郑州大学出版社,2002:75-80.[10]㊀马秋成,卢安舸,高连兴,等.莲子物料空气动力学特性与壳仁分离装置试验[J].农业工程学报,2015,31(6):297-303.[11]㊀陈革,阮有志.3种粮食颗粒倾斜气力输送悬浮速度的实验与回归分析[J].沈阳师范大学学报(自然科学版),2015,33(2):208-211.[12]㊀王振华.运输机械设计选用与标准实用手册[M].合肥:安徽文化音像出版社,2004.[13]㊀王立军,孙占峰,蒋恩臣.气吸式联合收获机沉降箱压力损失影响因素的研究[J].东北农业大学学报,2005(3):354-357.[14]㊀续魁昌,王洪强,盖京方.风机手册[M].2版.北京:机械工业出版社,2011:253-254.[15]㊀毛永民,宋仁平,申连英,等.鲜枣质量等级:GB/T22345-2008[S].北京:中国标准出版社,2006:1-6.Design and Test of Small Self-removing Air-suction Jujube Picker Zhuang Zihao1,Yuan Panpan1,Han Changjie1,Zhang Jing1,Gao Jie2(1.College of Mechanical and Electrical Engineering,Xinjiang Agricultural University,U㊃㊃r u㊃㊃mqi830052,China;2.Xinjiang Zhongshou Agricultural&Animal Husbandry Machinery Co.Ltd.,U㊃㊃r u㊃㊃mqi㊀830013,China) Abstract:In order to solve the problem of high labor intensity and low efficiency in artificial harvest of xinjiang jujube, a self-propelled air suction jujube pickup machine was designed to realize the functions of picking up and removing mis-cellaneous matters on the ground jujube.To obtain the suspension characteristics of jujube and its leaves,the suspension rate of red jujube is12.45m/s to23.69m/s and the suspension rate of jujube leaves does not exceed3m/s.By using the dynamic pressure loss of the inlet and outlet of the air suction,the necessary wind speed conditions of the inlet of the air suction are calculated.The design and function of impurity guide roller are introduced.The size of the air inlet and ju-jube chamber of the settling chamber was calculated and determined.Field test results show that when the fan rotation speed is2900r/min,the harvest rate isȡ98.3%,the damage rate isɤ3.83%,and the impurity rate isɤ3.02%. Key words:jujube on the ground;picker;self-removing air-suction2021年8月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第8期。
自走式红枣捡拾机的设计作者:王洪昌李燕梅砚晨潘涛袁昊曾荣来源:《安徽农业科学》2019年第15期摘要由于红枣矮化密植的特点,红枣收获大多依靠人工,效率低下,劳动强度大。
为解决这一问题,在已有红枣捡拾机器的基础上,基于负压产生气吸的原理设计了一种自走式红枣捡拾机,该机器主要由收集装置、清选装置、行走机构、传动机构、动力系统和底盘组成。
利用负压收集红枣,該设计能有效减少红枣捡拾过程中的冲击损坏,具有初步清选的功能,并且实现了自走,提高了劳动效率。
关键词红枣;捡拾机;自走式;气吸式中图分类号 S225文献标识码 A文章编号 0517-6611(2019)15-0208-03doi:10.3969/j.issn.0517-6611.2019.15.057开放科学(资源服务)标识码(OSID):Abstract Due to the characteristics of dwarf dense planting of red jujube,; the harvest of red jujube mostly depends on artificial operation,which is of lowefficiency and highlabor intensity. In order to solve this problem, on the basis of the existing red jujube picking machine, a selfpropelled red jujube collector was designed based on the principle of gas suction generated by negative pressure. The collector is mainly composed of collecting component, clearing device, walking mechanism,transmission mechanism, power system and chassis. The negative pressure was used to collect red jujube, this design could effectively reduce the impact damage in the process of collecting red jujube, it had a preliminary cleaning function, which could realize selfpropelled function and improve the labor efficiency.Key words Red jujube;Collector;Selfpropelled;Gas suction基金项目华中农业大学大学生科技创新基金项目(2018233);国家自然科学基金青年项目(51605182)。

大枣采摘机的机构选型设计答辩引言大枣采摘是一项繁重而耗时的劳动任务,传统的采摘方式需要大量人力,效率低下且成本高昂。
为了解决这一问题,我们小组致力于设计一台大枣采摘机。
本次答辩将重点讨论机构选型设计,以确保机器在采摘大枣时具备高效、稳定、安全性能。
机构选型设计的考虑因素在进行机构选型设计之前,我们考虑了以下几个因素:1. 采摘效率大枣的果实集中在树的上方位置,而树冠分支复杂,分布密集。
为了提高采摘效率,我们需要选择合适的机构设计,使得机器能够快速、准确地接触到大枣并将其采摘下来。
2. 机器稳定性大枣采摘机在采摘过程中可能会面临不断摇晃的情况,因此机器的稳定性非常重要。
合适的机构设计应能够保持机器的稳定,确保其在不同工作条件下仍能正常运行。
3. 安全性能大枣采摘机涉及复杂的机构运动,同时工作环境多为高空。
安全性能是我们设计过程中必须要考虑的重要因素。
我们需要选择可靠的材料和结构,确保机器的运行过程中不会出现意外情况。
4. 维修和保养便捷性在实际使用过程中,机器可能会出现故障或需要维修保养。
因此,我们需要选择易于维修和保养的机构设计,降低维修成本和维修时间。
机构选型设计概述基于以上考虑因素,我们综合了多种机构设计方案,并最终选择了以下设计方案:1. 机械臂夹持设计我们采用机械臂夹持设计来实现大枣采摘的过程。
该设计方案具备以下优势: -机械臂具备较高的灵活性和运动精度,能够准确地夹持住大枣,并将其安全地采摘下来。
- 机械臂夹持设计使得机器的操作更为稳定,降低了机器受到外界干扰的影响,提高了采摘效率。
2. 双轨道导向系统为了保持机器的稳定性,我们引入了双轨道导向系统。
该系统具备以下优势: -双轨道导向系统能够确保大枣采摘机在工作过程中保持稳定,减少机器摇晃幅度,提高采摘的准确度和效率。
- 双轨道导向系统的材料选择和结构设计能够提供足够的强度和稳定性,确保机器能够在高空环境下安全运行。
3. 自动调节和保护装置为了增强机器的安全性能,我们引入了自动调节和保护装置。

大枣收获机发明设计大枣收获机发明设计摘要:针对河北阜平大枣设计了一款收获机器,打枣装置采用曲柄连杆机构,对枣树枝进行高频率低振幅的上下往复振动,实现机械化打枣,收枣装置采用负压原理,由汽油机带动高压轴流风机的运转,使箱体内部与外部产生压力差,从而将地面上的枣吸入箱体内部,完成大枣的收集。
本装置预期达到生产率≥30株/h;采净率≥80%,初步确定该打枣装置的振动频率400~500次/min,振幅为20~30mm。
关键词:大枣;打枣装置;曲柄连杆;收枣装置;压力差1 打枣装置设计1.1 打枣方案设计方案一:水平横向拉动树干振动。
此种方法在一些矮化密植的枣树上有应用,如新疆,但本设计针对河北阜平大枣,这里的枣树历史悠久,树干高大,直径较粗,因此水平方向拉伸需要消耗较大的功率且不能保证落果率,不予采用。
方案二:打枣杆在竖直平面内一定幅度摆动,击打树冠。
在人工收枣时经常采用此种方法,但经常是作为其他收枣方式的辅助,比如落果不完全时,用长度约2米的韧性枝条作为工具直接击打未落果的树枝,优点是操作灵活,落果率高,不足之处是由于对枣树枝条进行横向击打,枣的运动方向为水平出发的抛物线,落地方向里枣树较远,收集困难。
如果以机械方式完成全部落果,由于树干较高,有的甚至高度达到12米,在初期需要对枣树树冠进行摆幅较大的击打,力矩较大,消耗的功率就多,所以此方案不予采用。
方案三:竖直方向依次振动树冠主要枝条。
采用小幅高频树冠振动方式,用连接杆迫使树冠做小幅高频震动,当树枝上的红枣所受惯性力大于果柄拉力时,红枣与果树脱离,从而实现红枣的采收。
此方案落果率高,且枣的掉落位置就在枣树的周围,收集方便,予以采用。
为了适应工作位置移动要求,整个打枣装置安装在一个带轮子的底板上,用手推动机构移动位置。
采用汽油机作为动力源,带动固定在汽油机上的带轮转动,主动带轮带动从动带轮,即实现对汽油机的降速,带轮传动能吸收运动传递过程中的震动,尤其是机构在颠簸的坡地上运动时,由于曲轴与从动带轮同轴,所以从动带轮的转动带动曲轴转动。
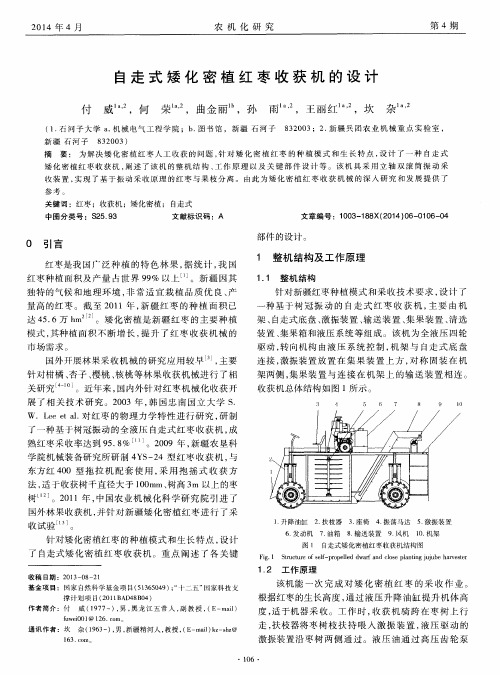
红枣采收激振器的设计与运动仿真张志元1ꎬ2ꎬ娄朝霞1ꎬ2ꎬ张慧明1ꎬ2ꎬ坎㊀杂1ꎬ2ꎬ付㊀威1ꎬ2(1.石河子大学机械电气工程学院ꎬ新疆石河子㊀832000ꎻ2.新疆兵团农业机械重点实验室ꎬ新疆石河子㊀832000)摘㊀要:为了降低人工采收成本ꎬ提高红枣的收获效率ꎬ促进红枣机械化收获方式及红枣产业的健康发展ꎬ设计了一种由3个偏心块为动力源的激振器ꎮ该激振器采用液压马达驱动ꎬ利用同步带轮驱动偏心块转动产生的离心力力偶做功使激振器的壳体振动ꎮ对壳体进行受力分析和运动形式的理论分析ꎬ并利用SolidWorks软件建立激振器的三维模型ꎬ导入ADAMS软件中进行无阻尼仿真分析ꎬ通过受力分析和理论分析证明壳体的运动规律符合简谐运动ꎮ仿真结果表明:壳体的运动规律与理论分析基本一致ꎬ验证了阻尼装置是激振器不可缺少的一部分ꎮ本研究可为红枣收获机激振装置的设计提供理论基础和技术支持ꎮ关键词:红枣ꎻ激振器ꎻ偏心块ꎻ运动仿真ꎻ运动分析中图分类号:S225.93㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)02-0070-040㊀引言红枣源产自我国ꎬ是我国分布最广的栽培果树之一ꎬ对提高当地居民收入㊁保护生态环境具有重要意义[1-4]ꎮ新疆气候干燥ꎬ光照充足ꎬ有利于种植高产优质的红枣ꎬ是全球最适宜种植红枣的地区之一[5-7]ꎮ据统计ꎬ2015年底新疆红枣栽植面积已突破52万hm2ꎬ居于全国首位[8-9]ꎮ新疆红枣种植面积迅猛发展ꎬ不仅提高新疆枣农的经济效益ꎬ也加速了红枣机械化的需求[10]ꎮ近年来ꎬ为降低红枣人工采收成本㊁提高收获效率㊁促进红枣产业的健康发展ꎬ科研院所对林果机械化收获开展了相关研究ꎮ2007年ꎬ新疆农垦科学院从意大利进口一台成套的干果收获机ꎬ适合采摘树干直径介于120~400mm的果树[11]ꎮ2009年ꎬ新疆农垦科学院机械装备研究所研制4YS-24型红枣收获机ꎬ采用抱摇式收获方法ꎬ激振器通过1个偏心块产生全方位振动[12-13]ꎮ2010年ꎬ新疆农业科学院农业机械化研究所研制了手持式振动林果收获机ꎬ采用树枝振动式收获方法ꎬ适于收获树高在3m左右的枣树ꎬ采净率大于85%[14]ꎮ2011年ꎬ南京林业大学机械电子收稿日期:2018-01-10基金项目:国家自然科学基金项目(51365049)ꎻ国家重点研发计划项目(2016YFD0701504)ꎻ石河子大学校级高层次人才项目(4004303)作者简介:张志元(1990-)ꎬ男ꎬ甘肃会宁人ꎬ硕士研究生ꎬ(E-mail)zzhiy1007@163.comꎮ通讯作者:付㊀威(1977-)ꎬ男ꎬ黑龙江五常人ꎬ副教授ꎬ硕士生导师ꎬ博士ꎬ(E-mail)fuwei001@126.comꎮ工程学院王长勤㊁许林云研究的抱摇式林果收获机ꎬ采用对称布置的偏心块[15]ꎮ2014年ꎬ新疆农业大学机械交通学院杨宛章研制了振动式林果采摘机ꎬ采用双偏心块式激振机构ꎬ采摘果树直径范围为80~120mm[16-17]ꎮ2014年ꎬ石河子大学机械电气工程学院设计出一种自走式矮化密植红枣收获机ꎬ激振器由曲柄滑块机构和拨杆滚筒组成[18-19]ꎮ2014年ꎬ浙江理工大学机械与自动控制学院杜小强设计出一种可调振幅单向拽振式林果采收机ꎬ变幅机构由曲柄摇杆滑块机构和调幅机构组成[20]ꎮ目前ꎬ针对红枣连续性采收作业的林果收获机研究较少ꎬ本文以红枣为研究对象ꎬ设计出一种由3个偏心块组成的激振器ꎬ可以实现连续性采收作业ꎬ为红枣收获机整机的设计提供了理论依据和技术支持ꎮ1㊀结构组成及工作原理1.1㊀结构组成该偏心块式激振器主要由激振装置㊁旋转滚筒装置和阻尼装置组成ꎬ如图1所示ꎮ激振装置主要由壳体㊁同步带轮和3个质量相等且均匀分布的偏心块组成ꎻ旋转滚筒装置由旋转滚筒和拨杆组成ꎻ阻尼装置由弹簧㊁阻尼带和阻尼轮组成ꎮ其中ꎬ激振装置和旋转滚筒装置通过法兰固定在一起ꎬ旋转滚筒装置和阻尼装置通过平键连接ꎬ激振器由两个立式轴承座固定在机架上ꎮ1.2㊀工作原理该偏心块式激振器是红枣收获机的主要部件之一ꎬ通过液压马达驱动ꎮ其处于工作状态时ꎬ通过液压马达驱动公转轴及公转轴上的同步带轮转动ꎻ同步带轮分别驱动3个均匀分布的偏心块以恒定的角速度同步转动ꎬ偏心块转动产生离心力ꎬ在离心力作用下产生力偶矩驱动壳体和旋转滚筒装置的转动ꎻ通过调节马达转速控制旋转滚筒装置的振幅和频率ꎬ从而达到要求的振动效果ꎮ1.偏心块㊀2.轴承座㊀3.同步带轮㊀4.壳体5.调节薄板㊀6.法兰㊀7.旋转滚筒㊀8.拨杆㊀9.阻尼装置图1㊀激振器示意图Fig.1㊀Theschematicofvibrator2 运动分析激振装置的激振力来自于3个偏心块以ω0同步转动产生的离心力Fꎬ通过自转轴O1㊁O2和O3作用在壳体上ꎬ并在壳体产生一力偶驱动旋转滚筒装置绕公转轴O的振动ꎮ为简化模型ꎬ除去阻尼装置ꎬ将旋转滚筒装置与激振装置的壳体简化为一体ꎬ其运动分析如图2所示ꎮ其中ꎬ图2(a)为激振装置参数示意图ꎬ图2(b)为激振装置受力示意图ꎮ图中偏心块的质量为m(kg)ꎻ壳体及旋转滚筒装置装置的质量为M(kg)ꎻ偏心块自转轴与公转轴之间的距离为d(m)ꎻ偏心块质心与自转轴的距离为r(m)ꎻ偏心块转动角速度为ω0(rad/s)ꎻ壳体及旋转滚筒装置振动的角速度为ω(rad/s)ꎻ在初始状态ꎬ偏心块绕自转轴转过的角度为θ(rad)ꎻ偏心块转动产生的离心力为F(N)ꎮ激振器处于工作状态时ꎬ在t时刻偏心块转过的角度为θꎬ计算公式为θ=ω0 t(1)其中ꎬt为时间(s)ꎮ偏心块转动产生的离心力为Fꎬ计算公式为F=m r ω20(2)图2㊀运动分析Fig.2㊀Kinematicanalysis由于3个偏心块材质㊁几何尺寸和转动角速度都相同ꎬ故在处于工作状态时产生的离心力F均相同ꎬ即F1=F2=F3=F(3)其中ꎬF1㊁F2㊁F3分别为3个偏心块绕自转轴O1㊁O2和O3产生的离心力ꎮ当3个偏心块与壳体的相对位置如图2(a)所示时ꎬ忽略偏心块质心与其自转轴的距离rꎬ将各自产生的离心力分别平移到相对应的自转轴处ꎬ以公转轴O为坐标原点建立笛卡尔坐标系O-xyꎬ其离心力的分解示意图2(b)所示ꎮ此时ꎬF1㊁F2㊁F3可分解为x轴方向上的F1x㊁F2x㊁F3x和y轴方向上的F1y㊁F2y㊁F3yꎬ则F1x=-F1 cosπ6-θæèçöø÷F1y=F1 sinπ6-θæèçöø÷ìîíïïïï(4)F2x=F2 cosπ6+θæèçöø÷F2y=F2 sinπ6+θæèçöø÷ìîíïïïï(5)F3x=F3 sinθF3y=-F3 cosθ{(6)联立式(4)~式(6)ꎬ分别对x轴和y轴的各分力进行求和得Fx=F1x+F2x+F3x=0Fy=F1y+F2y+F3y=0{(7)由式(7)可得偏心块产生的离心力的合力为0ꎮ现对各离心力的分力分别对公转轴O求力偶ꎬ取与ω相同的方向为正方向可得ðMO(F)=F1x a-F1y b-F2x a+㊀㊀㊀㊀㊀㊀㊀㊀㊀F2y b+F3x d(8)其中ꎬa㊁b为距离(m)ꎮ由图2(b)中三角关系可得a=12db=32dìîíïïïï(9)联立以上各式可得ðMO(F)=52d F sinθ(10)由式(10)分析可以得到:在驱动力偶距的作用下ꎬ壳体的运动符合简谐运动的规律ꎬ即当θ在(0ꎬπ)范围内时ꎬ驱动力偶矩逆时针方向驱动壳体及旋转滚筒装置做逆时针加速振动ꎻ当θ在(πꎬ2π)范围内时ꎬ驱动力偶矩顺时针方向驱动壳体及旋转滚筒装置做逆时针减速振动ꎮ3 运动仿真为验证理论分析的正确性ꎬ运用SolidWorks软件绘制简化模型作为仿真模型ꎬ并将其保存为∗.x_t格式导入ADAMS软件ꎮ设置公转轴与地面为固定副连接ꎬ公转轴与壳体㊁壳体与各自转轴之间加转动副连接ꎬ对该装置进行运动模拟仿真ꎬ如图3所示ꎮ图3㊀激振器仿真分析Fig.3㊀Vibratorsimulationanalysis该仿真主要是对简化后的激振装置壳体的运动状态进行分析ꎬM=100kgꎬm=10kgꎬd=0.28mꎬr=0.12mꎬω0=3rad/sꎬ设置仿真时间为5sꎬ得到壳体和同步带轮的角速度和角加速度随时间变化曲线ꎬ如图4所示ꎮ图4㊀仿真角速度和角加速度随时间变化曲线Fig.4㊀Thesimulationofangularvelocityandangularaccelerationwithtime由图4可知:在0-0.07s内ꎬ3个偏心块的运动尚未达到同步状态ꎬ故选取0.07-5s作为仿真结果ꎮ从ADAMS软件仿真图的角速度和角加速度曲线可看出:在1.2s的时间周期内ꎬ其运动曲线是规律的简谐曲线ꎬ角速度随着角加速度增大而增大ꎻ但角加速度最大时ꎬ角速度并未达到最大值ꎮ图4中ꎬ由于仿真时偏心块的初始位置(即相位角)不同ꎬ会引起仿真曲线与理论分析曲线的差别ꎬ但总体运动趋势基本一致ꎮ由角速度图可以看出:波峰处的角速度值在逐渐变大ꎬ是由于在仿真时忽略了激振器阻尼装置ꎻ阻尼装置的刚度系数和阻尼系数对角速度曲线和角加速度曲线影响明显ꎬ从而证明了激振器设计阻尼装置的合理性ꎮ因此ꎬ从ADAMS软件运动分析得到的曲线和理论公式推导的曲线基本一致ꎮ4㊀结论1)通过对激振器的运动分析得到激振器壳体的理论运动规律为简谐运动ꎮ2)将激振器的三维模型导入ADAMS进行运动仿真ꎬ结果表明仿真曲线和理论曲线基本一致ꎬ证明了理论分析的正确性ꎮ3)该仿真结果验证了激振器阻尼装置在本设计中的合理性和重要性ꎮ参考文献:[1]㊀刘运超ꎬ余国新ꎬ闫艳燕.新疆红枣产业发展现状与对策研究[J].北方园艺ꎬ2013(18):165-169.[2]㊀张莹ꎬ刘芳ꎬ何忠伟.我国红枣产业的经济分析与前景展望[J].农业展望ꎬ2011ꎬ7(10):36-40.[3]㊀漆联全.新疆红枣产业的现状㊁要求及其发展趋势[J].新疆农业科学ꎬ2010ꎬ47(S2):8-12.[4]㊀刘孟军.中国红枣产业的现状与发展建议[J].果农之友ꎬ2008(3):3-4ꎬ26.[5]㊀杨红英.矮化密植红枣采收装置采收部件的设计及试验研究[D].石河子:石河子大学ꎬ2013.[6]㊀王田利.我国红枣产销概况[J].中国果业信息ꎬ2008ꎬ25(1):21-22.[7]㊀张亚欧ꎬ坎杂ꎬ李成松ꎬ等.矮化密植红枣收获机捡拾装置的设计[J].农机化研究ꎬ2016ꎬ38(4):71-75. [8]㊀郭晓成ꎬ李倩娥.枣树栽培新技术[M].杨凌:西北农林科技大学出版社ꎬ2005:8-10.[9]㊀付威ꎬ张志元ꎬ刘玉冬ꎬ等.振动激励下枣树力传递效果室内模拟试验[J].农业工程学报ꎬ2017ꎬ33(17):65-72. [10]㊀史高昆.气吸式红枣收获机设计与试验研究[D].阿拉尔:塔里木大学ꎬ2014.[11]㊀汤智辉ꎬ贾首星ꎬ沈从举ꎬ等.VIBROLIV干果采收机的引进与试验[J].新疆农机化ꎬ2009(4):38-40.[12]㊀汤智辉ꎬ孟祥金ꎬ沈从举ꎬ等.机械振动式林果采收机的设计与试验研究[J].农机化研究ꎬ2010ꎬ32(8):65-69. [13]㊀汤智辉ꎬ沈从举ꎬ孟祥金ꎬ等.4YS-24型红枣收获机的研制[J].新疆农机化ꎬ2010(1):30-32.[14]㊀孟祥金.手持式红枣振动收获机的设计研究[D].石河子:石河子大学ꎬ2014.[15]㊀王长勤ꎬ许林云ꎬ周宏平ꎬ等.偏心式林果振动采收机的研制与试验[J].农业工程学报ꎬ2012ꎬ28(16):10-16. [16]㊀刘进宝ꎬ韩长杰ꎬ杨宛章ꎬ等.振动式林果采摘机械的设计[J].中国农机化ꎬ2014ꎬ35(3):41-44ꎬ58.[17]㊀刘进宝ꎬ韩长杰ꎬ郭辉ꎬ等.偏心式林果采摘振动系统[J].农业工程ꎬ2013ꎬ3(1):68-71.[18]㊀付威ꎬ何荣ꎬ曲金丽ꎬ等.自走式矮化密植红枣收获机的设计[J].农机化研究ꎬ2014ꎬ36(4):106-109.[19]㊀何荣ꎬ坎杂ꎬ付威ꎬ等.矮化密植红枣收获机激振装置设计与运动分析[J].农机化研究ꎬ2014ꎬ36(2):64-67. [20]㊀杜小强ꎬ倪柯楠ꎬ潘珂ꎬ等.可调振幅单向拽振式林果采收机构参数优化[J].农业工程学报ꎬ2014ꎬ30(16):25-32.DesignandMotionSimulationofJujubeHarvestExciterZhangZhiyuan1ꎬ2ꎬLouZhaoxia1ꎬ2ꎬZhangHuiming1ꎬ2ꎬKanZa1ꎬ2ꎬFuWei1ꎬ2(CollegeofMechanicalandElectricalEngineeringꎬShiheziUniversityꎬShihezi832000ꎬChinaꎻ2.AgricultureMachineryKeyLaboratoryofXinjiangProductionandConstructionCorpsꎬShihezi832000ꎬChina)Abstract:Inordertoreducethecostofartificialharvestingꎬimprovetheharvestingefficiencyofjujubeandpromotethehealthydevelopmentofjujubemechanizedharvestingmethodsandjujubeindustry.Avibrationexciterwiththreeeccentricblocksaspowersourcewasdesigned.Thevibrationexciterdrivenbyahydraulicmotor.Thecentrifugalforcegeneratedbytherotationoftheeccentricblockdrivenbythetimingbeltpulleycouplesthevibrationofthevibrationexcitertotheshelloftheexciter.TheforceanalysisandthemovementformofthevibrationcaseareanalyzedꎬandtheSolidWorksisusedtoestablishthe3Dmodeloftheexciter.Thethree-dimensionalmodelisstoredintheADAMSforundampedsimulationanalysis.Thesimulationresultsshowthatthemovementlawoftheshellisbasicallythesameasthetheoreticalanalysisꎬwhichisharmonicmotion.Itisalsoverifiedthatthedampingdeviceisanindispensablepartoftheexciter.Thisstudycanprovidetheoreticalbasisandtechnicalsupportforthedesignoftheexcitationdeviceforjujubeharvester.Keywords:jujubeꎻexciterꎻeccentricblockꎻmotionsimulationꎻmotionanalysis。
前言果业是人类生存和社会发展的经济基础,果业产业应该是一个可持续发展的产业。
因而,随着世界性果业日益发展,寻找新的果园发展方式摆在了人们的面前。
枣业是果业中的一种,在新疆南疆一带种植广泛,果园收获作业是果园生产全过程中重要的环节,枣树收获用工量多,劳动强度大。
传统的人工收获方法,每公顷需几百个工时,占果园生产过程中总用工量的50%左右,效率大大降低。
因此,果园收获机械化一直是国内外研究工作的重点。
当前,果园收获机械化在已作为一种比较成熟技术在国外被广泛采用,机械收获的生产效率与人工相比提高了5~10 倍,大大的提高了效率。
机械采收的方法主要有振摇法和梳刷法,振摇法是应用最多的一种机械采收方法,是国外应用较多、适用性较好的采收机型。
然而,国内果园收获主要依靠人工摘或借助简单工具采摘,林果采收机械的研究在我国仍处于起步阶段,尚未见比较成熟的实用机具报道。
目前,随着新疆特色林果,尤其是红枣等林果的产业化发展,依靠人工采收已不能满足产业化生产的需要。
针对国内尤其是新疆果园采收机械的研究现状和林果业机械化发展的新的形式及要求,研究并设计机械振动式林果采收机,对于发展并提高我国林果收获机械化水平具有十分重大的意义。
关键词:红枣;收获机;振动式目录1绪论 (1)1.1课题研究的目的及意义 (1)1.2国内外水果采摘机械的现状 (1)1.3国外现状水果采摘机械的现状 (2)1.4本课题需要重点研究的关键问题及解决思路 (2)2总体方案拟定 (3)2.1方案来源 (3)2.2总体方案设计 (3)3总体计算 (5)3.1传动比分配 (5)3.2效率计算 (5)3.3功率计算 (5)3.4转矩计算 (5)4主要零部件设计 (6)4.1减速机的选择 (6)4.2V带的设计计算 (6)4.3带轮计算 (8)4.4滚子链传动设计计算 (9)4.5链轮计算 (10)4.6直齿圆锥齿轮计算 (11)4.7轴的设计 (15)5轴的校核 (19)5.1按扭转刚度条件计算 (19)5.2校核轴的疲劳强度 (19)6辅助部件 (21)6.1键的选择 (21)6.2联轴器的选择 (21)6.3轴承选择 (21)7总结 (22)致谢 (23)参考文献 (24)1绪论1.1课题研究的目的及意义大枣又名红枣、干枣、枣子,起源于中国,在中国已有四千多年的种植历史,自古以来就被列为“五果”(桃、李、梅、杏、枣)之一。
红枣收获机课程设计一、教学目标本课程旨在让学生了解红枣收获机的基本原理、结构及其在工作中的优越性。
通过本课程的学习,学生将能够:1.描述红枣收获机的主要部件及其功能。
2.解释红枣收获机的工作原理。
3.分析红枣收获机在红枣种植业中的应用及其优势。
4.能够操作红枣收获机进行简单的红枣收获作业。
二、教学内容本课程的教学内容主要包括以下几个部分:1.红枣收获机的概述:介绍红枣收获机的定义、发展历程及其在红枣种植业中的重要性。
2.红枣收获机的结构与功能:详细讲解红枣收获机的主要部件,如切割器、传送带、电机等,以及它们的功能。
3.红枣收获机的工作原理:阐述红枣收获机是如何工作的,包括切割、传送、收集等过程。
4.红枣收获机的操作与维护:介绍如何正确操作红枣收获机,以及如何进行日常维护,确保其正常工作。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式进行教学,包括:1.讲授法:教师通过讲解红枣收获机的原理、结构、操作和维护等方面的知识,使学生掌握基本概念。
2.演示法:教师通过现场演示红枣收获机的工作过程,使学生更直观地了解红枣收获机的实际应用。
3.实践操作法:学生亲自动手操作红枣收获机,进行实际的收获作业,提高操作技能。
4.小组讨论法:学生分组讨论红枣收获机的优点、不足及其改进措施,培养学生的创新思维和团队合作能力。
四、教学资源为了保证教学的顺利进行,教师需准备以下教学资源:1.教材:选用与红枣收获机相关的教材,为学生提供系统的理论知识。
2.参考书:提供相关领域的参考书籍,丰富学生的知识储备。
3.多媒体资料:制作课件、视频等多媒体资料,帮助学生更直观地理解红枣收获机的工作原理和操作方法。
4.实验设备:准备红枣收获机及其相关设备,为学生提供实践操作的机会。
五、教学评估本课程的评估方式将包括以下几个方面:1.平时表现:评估学生的出勤、课堂参与度、提问回答等情况,占总评的20%。
2.作业:评估学生完成的练习题、实验报告等,占总评的30%。
前言果业是人类生存和社会发展的经济基础,果业产业应该是一个可持续发展的产业。
因而,随着世界性果业日益发展,寻找新的果园发展方式摆在了人们的面前。
枣业是果业中的一种,在新疆南疆一带种植广泛,果园收获作业是果园生产全过程中重要的环节,枣树收获用工量多,劳动强度大。
传统的人工收获方法,每公顷需几百个工时,占果园生产过程中总用工量的50%左右,效率大大降低。
因此,果园收获机械化一直是国内外研究工作的重点。
当前,果园收获机械化在已作为一种比较成熟技术在国外被广泛采用,机械收获的生产效率与人工相比提高了5~10 倍,大大的提高了效率。
机械采收的方法主要有振摇法和梳刷法,振摇法是应用最多的一种机械采收方法,是国外应用较多、适用性较好的采收机型。
然而,国内果园收获主要依靠人工摘或借助简单工具采摘,林果采收机械的研究在我国仍处于起步阶段,尚未见比较成熟的实用机具报道。
目前,随着新疆特色林果,尤其是红枣等林果的产业化发展,依靠人工采收已不能满足产业化生产的需要。
针对国内尤其是新疆果园采收机械的研究现状和林果业机械化发展的新的形式及要求,研究并设计机械振动式林果采收机,对于发展并提高我国林果收获机械化水平具有十分重大的意义。
关键词:红枣;收获机;振动式目录1绪论 (1)1.1课题研究的目的及意义 (1)1.2国内外水果采摘机械的现状 (1)1.3国外现状水果采摘机械的现状 (2)1.4本课题需要重点研究的关键问题及解决思路 (2)2总体方案拟定 (3)2.1方案来源 (3)2.2总体方案设计 (3)3总体计算 (5)3.1传动比分配 (5)3.2效率计算 (5)3.3功率计算 (5)3.4转矩计算 (5)4主要零部件设计 (6)4.1减速机的选择 (6)4.2V带的设计计算 (6)4.3带轮计算 (8)4.4滚子链传动设计计算 (9)4.5链轮计算 (10)4.6直齿圆锥齿轮计算 (11)4.7轴的设计 (15)5轴的校核 (19)5.1按扭转刚度条件计算 (19)5.2校核轴的疲劳强度 (19)6辅助部件 (21)6.1键的选择 (21)6.2联轴器的选择 (21)6.3轴承选择 (21)7总结 (22)致谢 (23)参考文献 (24)1绪论1.1课题研究的目的及意义大枣又名红枣、干枣、枣子,起源于中国,在中国已有四千多年的种植历史,自古以来就被列为“五果”(桃、李、梅、杏、枣)之一。
红枣富含蛋白质、脂肪、糖类、胡萝卜素、B族维生素、维生素C、维生素P以及钙、磷、铁和环磷酸腺苷等营养成分。
其中维生素C的含量在果品中名列前茅,有维生素王之美称。
随着红枣的种植面积的增加,红枣的机械化作业在红枣栽培中的重要性逐渐凸显。
依据最近几年新疆林果业发展的态式分析,新疆果树种植每年以10%的速度递增,由于林果业的快速发展,各地已形成了较大的种植规模,每到收获季节需要投入大量的劳力来完成水果采收。
可以预见到,再过3~5年,新种植的果树进入盛果期后,水果采收作业将会出现因劳动力短缺、采收不及时,而直接影响果品质量和造成大量损失的问题。
这是因为,水果采摘是一项劳动投入量很大的作业,有些水果因成熟期不一致,需要多次采摘才能完成收获;而有些作为鲜食或作为加工用途的果品,因市场对于果实外观要求较高,不能有碰伤、刮伤、压裂等机械损伤,采收这些水果时必须小心翼翼;另外,水果收获是在离地面有3~5 m高的空中作业,以上原因决定了水果采摘是一项费时、费工、费力的作业。
人工采收水果的速度缓慢,大面积发展水果种植时,必须要依靠机械化来提高采摘效率。
据有关资料介绍,有些鲜食水果的采收用工量较大,约占水果生产总用工量的50%以上,导致特色果品的生产成本过大,不能满足向果品加工企业提供数量充足、质量优越、价格相对低廉的原料,这样极不利于企业直接参与市场竞争。
果园收获作业是果园生产全过程中最重要的环节,林果采收劳动强度大,用工量多。
传统的人工采收方法,每公顷需要几百个工时,占果园生产过程中用工量的50%左右,费时费力且成本高。
目前,随着新疆特色林果,尤其是红枣等林果的规模化、产业化发展,依靠人工采收的方式已不能满足红枣等产业化生产的需要。
针对我国尤其是新疆林果采收机械的研究现状和林果业机械化发展的新形式要求,研究设计机械振动式林果采收机,对提高我国林果收获机械化水平具有重要意义。
1.2国内外水果采摘机械的现状上世纪80年代我国开始林果机械化收获研究,张克孝教授先后采用梳刷和振动的原理对黑加仑进行机械采收的试验研究;王业成采用振动采收装置对黑加仑进行收获试验;宁夏固原地区农机所研制了手工沙棘采收器。
宁夏农林科学院研制的枸杞采摘机;内蒙古自治区园艺科学研究所研究了喷洒40%乙烯利溶剂的沙棘化学采收法;内蒙古林业研究院应用气吸式小林果采收装置进行气吸采收。
这些方法可在一定程度上提高工效、改善采收条件,但采收效率低,果树损伤严重。
2009年,新疆农垦科学院机械装备研究所研制4YS-24型红枣收获机,采用抱摇式收获方法,适于收获树高3 m以上的枣树,采净率91.5%;2010年新疆农业科学院农业机械化研究所研制了手持式振动林果收获机,采用树枝振动式收获方法,采净率≥85%;时代沃林推出的果树振动采收机ZTM-02,采用抱摇式收获方法,适用于各类坚果和表皮不易破损的鲜果进行收获。
1.3国外现状水果采摘机械的现状20世纪60年代,国外开始林果机械化收获研究,根据收获机械所用动力不同,主要有气力式和机械式。
气力式分为:气吹和气吸式,振动式根据激振位置不同分为:树杆、树枝和树冠振动式。
气力式振动收获:Whitney J D和Wheaton T A通过气力式振动采收机对喷洒落果剂的Valencia柑橘进行试验。
研究发现:该方法的采收率很低,且气力式振动采收机相对于人工采摘,柑橘减产16%。
树杆振动式收获:Whitney and Wheaton使用FMC-4000抱摇式振动收获机对喷洒落果剂的柑橘进行试验,振动时间3~7s,收获率在90%以上,经研究发现机采比人工采摘的柑橘减产10%。
树枝振动式收获:Mateev L.M.et al.认为采收工作部件撞击樱桃树枝的冲击力为随机函数,在不同工作参数下建立了樱桃振动采收数学模型,在樱桃田间采收试验中,实验结果与该模型预测结果的相关系数约为0.99。
树冠振动式收获:韩国忠南国立大学S.W.Lee etal.对红枣的物理力学特性研究,研究基于树冠振动的采收装置,激振频率7.7 Hz,试验时间3 s,成熟红枣采收率达到95.8%。
综上所述,国外没有可以引进消化吸收的矮化密植红枣收获机,新疆兵团以及国内林果业机械化发展步伐缓慢,国内林果收获机研制也没有提供相应的技术和经验,林果业生产过程机械化作业大部分尚处于空白阶段。
为了应对矮化密植红枣种植面积迅猛增长带来的收获难题,国内自主研制其收获机械装备势在必行。
1.4本课题需要重点研究的关键问题及解决思路矮化密植红枣枣树枝干比较细,且不会太高。
因此,在进行机械化采收的时候还要特别主要的是对枣树枝干的保护,就是敲击强度不宜过大,同时,还要保证采净率。
因此,在设计过程中要注意机械采摘过程中对枣树枝干的保护等问题。
通过资料的查询和实际的测量,同时还有指导老师的指导,可以总结出该矮化密植红枣收获机设计要求为:工作宽度小,易移动,采摘过程对树枝和果实的损伤小。
经借鉴采用连续旋转的方式敲击树枝,敲击棒为橡胶材质,尽量减少对树枝的损伤。
2总体方案拟定2.1方案来源门式高架采果机:用成排的指杆式橡胶敲击棒在液压系统操纵下做往复运动,敲打果枝,使果实脱落,适用于采收成行的矮化果树。
如图2-1所示:123451操纵台2桨叶3振动器4输送带5承接导向器图2-1 门式高架采果机2.2总体方案设计1收果架2钢架轮3钢架4轴承端盖5螺钉6轴承7敲击棒8联轴器9螺栓10垫片11螺母12轴承座13链轮14大带轮15锥齿轮16链条17带18小带轮图2-2 总体方案图总体方案图如图2-2所示,以发动机动力输出轴为动力,动力输出轴以联轴器与减速机相连接,将动力递给减速机,带动减速机旋转,减速机输出轴以联轴器与小皮带轮相连接,小皮带轮通过皮带与大皮带轮相连接,将动力传递给大皮带轮,实现大皮带轮的转动,皮带应用张紧轮张紧,并采用防护罩,以防止灰尘。
大皮带轮转动带动轴的转动,以实现同轴连接链轮转动,主动链轮的转动带动其余两轴两个从动链轮转动,从动链轮转动带动同轴相连接锥齿轮的转动,通过锥齿轮的变向作用,将竖直平面的运动改为水平平面的运动,从而带动连接有橡胶敲击棒的轴旋转,以固定频率树枝,使果实下落,下面放有接果盘,用以收集果实,收集完果实后用风扇吹去落叶,在进行其他方式除杂工作,最后完成对红枣的收集过程。
在收集的过程中应当注意工作宽度小,易移动,采摘过程对树枝和果实的损伤小,链轮润滑等要求。
3总体计算3.1传动比分配选择转速为540 r/min后动力输出轴,执行机构敲击枣树的频率为60 r/min,传动比为9:1,综合考虑各个因素,分配传动比为减速机6:1,大带轮与小带轮传动比为1.5:1,链轮传动比为1:1,锥齿轮传动比为1:1。
3.2效率计算η联轴器=0.99,每对滚动轴承η滚动轴承=0.98,η带=0.96,η链条=0.9,η锥齿轮=0.92η发动机=0.85,η减速器=0.93.3功率计算选择型号4BTA3.9-C100-II发动机,故功率P为25×0.735Kw=18.375 kW动力输出轴功率P动力输出轴=P×η发动机≈15.62 kW输入减速机功率P输入= P动力输出轴×η联轴器≈15.46 kW小带轮轴功率P小带轮= P输入×η减速器≈13.91 kW大带轮轴功率P大带轮=P小带轮×η带×η滚动轴承≈13.09 kW上锥齿轮1轴功率P1锥=P大带轮×η滚动轴承×η链条≈11.53 kW上锥齿轮2轴功率P2锥=P1锥×η滚动轴承×η链条×η锥齿轮≈9.35 kW下锥齿轮3轴功率P3锥=P1锥×η滚动轴承×η锥齿轮≈10.17 kW下锥齿轮4轴功率P4锥=P2锥×η滚动轴承×η锥齿轮≈8.42 kW3.4转矩计算额定转矩Td =9550×P动力输出轴/nm≈276.07 N·m输入减速机转矩T减速机=Td×η联轴器≈273.31 N·m小带轮轴转矩T小带轮=T减速机×η减速器×i≈1495.85N·m大带轮轴转矩T大带轮=T小带轮×η带×η滚动轴承×η发动机×i≈2100.87 N·m上锥齿轮1轴转矩T1锥=T大带轮×η滚动轴承×η链条≈1861.79 N·m上锥齿轮2轴转矩T2锥=T1锥×η滚动轴承×η链条×η锥齿轮≈1510.73N·m下锥齿轮3轴转矩T3锥=P1锥×η滚动轴承×η锥齿轮≈ 1678.59 N·m下锥齿轮4轴转矩T4锥= P2锥×η滚动轴承×η锥齿轮≈1362.07 N·m4主要零部件设计4.1减速机的选择通过查阅相关材料,决定采用摆线减速机。