机器人应用2
- 格式:ppt
- 大小:3.08 MB
- 文档页数:64
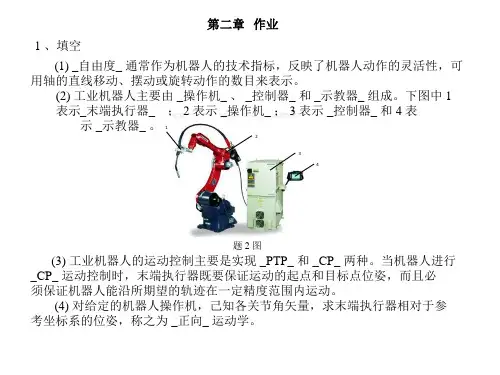
工业机器人实操与应用技巧第2章一、工业机器人的基本操作原理1.控制系统:工业机器人的控制系统主要由主控制器和控制软件组成。
主控制器是工业机器人的大脑,负责接收和传输指令、控制机器人的运动和动作。
控制软件则是控制系统的操作界面,通过软件可以对机器人进行编程和调试。
2.传感器系统:传感器系统是工业机器人的感知器官,用于感知周围环境的信息,以便机器人进行相应的动作。
常见的传感器包括视觉传感器、力传感器、触觉传感器等。
视觉传感器可以用于检测工件的位置、形状和颜色,力传感器可以用于检测机器人与工件之间的力的大小和方向,触觉传感器可以用于检测机器人与工件之间的接触。
3.执行系统:执行系统是工业机器人的执行器,用于实现机器人的运动和动作。
执行系统包括机械臂、末端执行器和驱动器。
机械臂是工业机器人的主体,用于实现机器人的运动和动作。
末端执行器是机械臂的末端装置,用于进行具体的操作,如抓取、切割、焊接等。
驱动器是机械臂的动力源,用于驱动机械臂的运动。
二、工业机器人的常见操作技巧在实际应用中,工业机器人的操作需要掌握一些基本的技巧,以确保机器人的运动和动作准确、稳定、安全。
1.坐标系的设置:坐标系是机器人进行运动和动作的基准系。
在进行编程之前,需要根据实际情况设置机器人的工作坐标系和基准坐标系。
工作坐标系是机器人的工作空间,基准坐标系是机器人与工件之间的相对位置关系。
合理设置坐标系可以提高机器人的运动和定位的精度。
2.示教模式的使用:示教模式是机器人的一种编程方式,可以通过手动操作机器人的臂架和控制器,将所需的运动和动作指令记录下来,然后保存为一个程序。
示教模式的使用可以简化编程的过程,为机器人的操作提供方便。
3.轴的控制方法:工业机器人通常具有多个关节轴,不同的轴对应机器人的不同运动方向。
在进行编程时,需要根据具体操作需求选择合适的轴控制方法,如点动控制、连续控制、增量控制等。
4.程序的调试和优化:在编程完成后,需要对程序进行调试和优化。
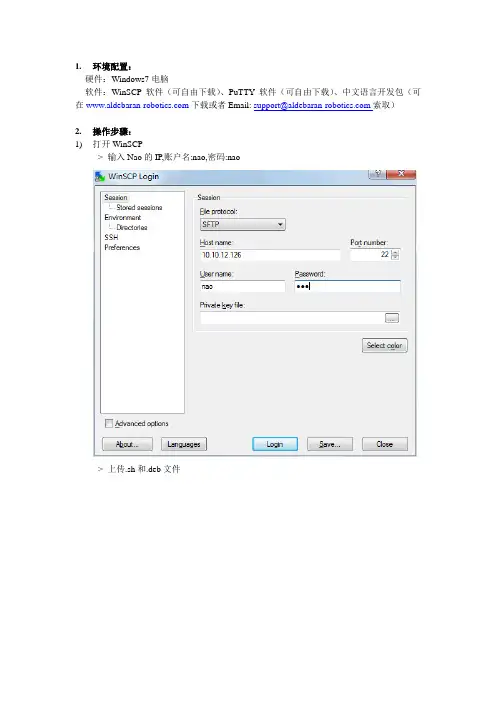
1.环境配置:-- 硬件:Windows7电脑-- 软件:WinSCP软件(可自由下载)、PuTTY软件(可自由下载)、中文语言开发包(可在下载或者Email: support@索取)2.操作步骤:1)打开WinSCP--> 输入Nao的IP,账户名:nao,密码:nao--> 上传.sh和.deb文件--> 输入Nao的IP--> 点击Open按钮,输入nao,密码nao--> su--> sh /home/nao/install_chinese.shlogin as: naonao@10.10.12.126's password:nao@nao [0] [~]$ lsasr-chm_1.0-r1_i386.deb naoqibehaviors remotesinstall_chinese.sh tts-chm-xiaoling_1.0-r3_i386.debnao@nao [0] [~]$ suroot@nao [0] [~]# lsroot@nao [0] [~]# lsroot@nao [0] [~]# suroot@nao [0] [~]# lsroot@nao [0] [~]# lsroot@nao [0] [~]# cdroot@nao [0] [~]# cd \home\naobash: cd: homenao: No such file or directoryroot@nao [1] [~]# naobash: nao: command not foundroot@nao [127] [~]# rubash: ru: command not foundroot@nao [127] [~]# lsroot@nao [0] [~]# cdroot@nao [0] [~]# cd \> lsbash: cd: ls: No such file or directoryroot@nao [1] [~]# cd \>root@nao [0] [~]# cd\>root@nao [0] [~]# cdroot@nao [0] [~]# cd ..root@nao [0] [/]# cd home/nao/root@nao [0] [/home/nao]# sh install_chinese.sh: not foundnese.sh: line 2:install_chinese.sh: line 34: syntax error: unexpected end of file (expecting "th en")root@nao [2] [/home/nao]# lsasr-chm_1.0-r1_i386.deb naoqibehaviors remotesinstall_chinese.sh tts-chm-xiaoling_1.0-r3_i386.debroot@nao [0] [/home/nao]# suroot@nao [0] [~]# cd /home/nao/root@nao [0] [/home/nao]# sh install_chinese.sh: not foundnese.sh: line 2:install_chinese.sh: line 34: syntax error: unexpected end of file (expecting "throot@nao [2] [/home/nao]# dpkg -r --force-depends asr-frf tts-frf-common tts-frf -juliedpkg: tts-frf-common: dependency problems, but removing anyway as you request:tts-frf-julie depends on tts-frf-common.(Reading database ... 8044 files and directories currently installed.)Removing tts-frf-common ...dpkg: tts-frf-julie: dependency problems, but removing anyway as you request:naoqi-academics depends on tts-frf-julie.Removing tts-frf-julie ...generating /etc/babile.conf ...dpkg: asr-frf: dependency problems, but removing anyway as you request:naoqi-academics depends on asr-frf.Removing asr-frf ...generating /etc/babear4.conf ...root@nao [0] [/home/nao]# dpkg -i tts-chm-xiaoling_1.0-r3_i386.debSelecting previously deselected package tts-chm-xiaoling.(Reading database ... 7992 files and directories currently installed.)Unpacking tts-chm-xiaoling (from tts-chm-xiaoling_1.0-r3_i386.deb) ...Setting up tts-chm-xiaoling (1.0-r3) ...generating /etc/babile.conf ...root@nao [0] [/home/nao]# -i asr-chm_1.0-r1_i386.debbash: -i: command not foundroot@nao [127] [/home/nao]# -i asr-chm_1.0-r1_i386.debbash: -i: command not foundroot@nao [127] [/home/nao]# dpkg -i asr-chm_1.0-r1_i386.debSelecting previously deselected package asr-chm.(Reading database ... 8019 files and directories currently installed.)Unpacking asr-chm (from asr-chm_1.0-r1_i386.deb) ...Setting up asr-chm (1.0-r1) ...root@nao [0] [/home/nao]# /etc/init.d/naoqi restartwaiting for naoqi to shutdownwaiting for naoqi to shutdownnaoqi stoppedstarting naoqiroot@nao [0] [/home/nao]#root@nao [0] [/home/nao]# rm asr-chm_1.0-r1_i386.debroot@nao [0] [/home/nao]# rm tts-chm-xiaoling_1.0-r3_i386.deb root@nao [0] [/home/nao]# rm install_chinese.sh。
工业机器人技术及应用第二版课后题1. 工业机器人技术的发展历程工业机器人技术的发展历程比较漫长,从20世纪60年代开始逐渐兴起,经过几十年的发展,如今已经成为了工业制造领域的重要装备。
工业机器人的应用范围也在不断扩大,涉及到汽车制造、电子产品组装、医药制造等众多领域。
2. 工业机器人技术的定义和分类工业机器人可以定义为一种具有自主运动能力,能够完成各种工业生产操作的自动化装置。
根据不同的应用场景和功能需求,工业机器人可以分为焊接机器人、装配机器人、搬运机器人等不同类型。
3. 工业机器人技术的关键技术及发展趋势在工业机器人技术的发展过程中,涉及到的关键技术有机械设计、传感器技术、控制系统等方面。
随着人工智能和大数据技术的不断发展,工业机器人技术也在不断演进,未来的趋势是更加智能化、柔性化和高效化。
4. 工业机器人技术在汽车制造中的应用以汽车制造为例,工业机器人在汽车车身焊接、涂装、组装等各个环节都扮演着重要角色。
通过工业机器人技术,汽车制造业得以实现生产线的自动化和智能化,大大提高了生产效率和产品质量。
5. 个人观点及总结从我个人的角度来看,工业机器人技术的应用对工业生产带来了巨大的变革,使得生产过程更加高效、精确,也让人们对未来工业发展充满了信心。
通过以上的讨论,我们对工业机器人技术及应用第二版课后题有了更深入的了解。
希望此篇文章能够为您提供一些有价值的信息,并且对您在相关领域的学习和工作有所帮助。
工业机器人技术的发展历程可以追溯到20世纪60年代,当时第一个工业机器人被引入到了汽车制造业中。
这一工业机器人主要用于汽车焊接和喷涂作业,替代了人工焊接和喷涂,大大提高了生产效率,同时也减少了劳动强度和提高了产品质量。
随着全球汽车工业的飞速发展,工业机器人技术在汽车制造领域得到了广泛的应用。
工业机器人在汽车制造中的应用不仅局限于焊接和喷涂,还包括车身打磨、零部件组装、整车总装等多个环节。
这些工业机器人能够完成重复性、高精度的操作,极大地提升了汽车制造生产线的效率和质量。

机器人编程实践-ros2基础与应用ROS2 是机器人操作系统(Robot Operating System) 的第二代版本,它提供了一套完整的软件框架,用于构建机器人应用程序。
ROS2 基于DDS(Data Distribution Service) 通信协议,具有更好的性能和可靠性,同时支持多种操作系统和编程语言,使得机器人开发更加灵活和便捷。
一、ROS2 基础1.ROS2 架构ROS2 架构由两部分组成:ROS2 核心和ROS2 工具。
ROS2 核心包括ROS2 运行时、ROS2 通信、ROS2 消息和ROS2 服务等组件,ROS2 工具包括ROS2 命令行工具、ROS2 图形化工具和ROS2 开发工具等。
2.ROS2 安装ROS2 支持多种操作系统,包括Ubuntu 、Debian 、Fedora 、CentOS 等。
安装ROS2 需要先添加ROS2 软件源,然后安装ROS2 包。
安装完成后,需要设置ROS2 环境变量,以便在终端中使用ROS2 命令。
3.ROS2 通信ROS2 通信基于DDS 协议,支持点对点通信和发布/订阅通信。
发布/订阅通信是ROS2 最常用的通信方式,它通过话题(Topic) 实现数据的发布和订阅。
发布者(Publisher) 将数据发布到话题中,订阅者(Subscriber) 从话题中订阅数据。
4.ROS2 消息ROS2 消息是数据的载体,它定义了数据的类型和格式。
ROS2 支持多种消息类型,包括基本类型、数组类型和自定义类型等。
用户可以根据需要定义自己的消息类型。
二、ROS2 应用1.ROS2 机器人控制ROS2 可以用于机器人控制,包括运动控制、传感器数据采集和处理等。
用户可以使用ROS2 提供的控制器和驱动程序,也可以自己编写控制器和驱动程序。
2.ROS2 机器人感知ROS2 可以用于机器人感知,包括视觉、声音、激光雷达等。
用户可以使用ROS2提供的感知库和算法,也可以自己编写感知程序。

小狗拉车
上一节我们做了一款屈伸小车,用到了2个棘轮机构。
今天我们再做一个用到棘轮的小制作,名字为小狗拉车。
做出的成品图片如图:
拼装步骤:
这个作品做好了。
大家先仔细看一下这个作品的结构,这个作品由一个电机驱动,也是用来曲柄连杆机构将旋转运动转换成了往复运动,从而驱动小狗的4条腿实现迈步。
后退上的棘轮机构实现了小狗能够往前走不至于打滑。
自己编程试试,看看电机怎么转动小狗才能够走起来。
试一下不同的电机的转动方向,不同的转动速度。
ROS2(Robot Operating System 2)是一个用于构建机器人应用程序的灵活框架,它提供了一套丰富的工具和库,方便开发人员快速构建和部署机器人应用。
在ROS2中,controller是一个重要的概念,它可以帮助机器人实现各种动作和运动控制。
本文将介绍ROS2中controller的概念和实例,以及如何在ROS2中使用controller来实现机器人的控制。
1. ROS2中controller的概念在ROS2中,controller是一个实现机器人控制的重要组件,它可以控制机器人的各种动作和运动。
Controller可以是一个单独的程序节点,也可以是一个包含了多个子控制器的复合控制器。
在ROS2中,controller通常通过订阅机器人的状态信息,然后根据设定的控制算法来生成控制命令,最终将控制命令发送给机器人的执行器或驱动器,从而实现机器人的控制。
2. ROS2中controller的实例下面通过一个简单的实例来介绍如何在ROS2中实现一个控制器。
假设我们有一个简单的两轮差速机器人,我们希望控制机器人实现直线运动和转弯运动。
我们可以使用ROS2中提供的controller功能包来实现这一功能。
我们需要创建一个controller节点,该节点订阅机器人的里程计信息,然后根据设定的运动控制算法来生成控制命令。
在ROS2中,我们可以使用Python或C++等语言来编写controller节点的代码。
在代码中,我们可以使用ROS2提供的控制器接口来实现运动控制算法,例如PID控制算法、模糊控制算法等。
我们需要将生成的控制命令发送给机器人的执行器或驱动器。
在ROS2中,我们可以使用ROS2提供的通讯工具来实现控制命令的发送。
对于两轮差速机器人,我们可以通过topic来发送控制命令给机器人的左右轮驱动器,从而实现机器人的运动控制。
我们可以运行我们编写的controller节点,检验机器人是否能够按照设定的控制算法实现直线运动和转弯运动。
2020年秋机器人技术及应用形考任务二二、单项选择1、机器人发展到现在共分为个阶段。
C、 32、机器人的机械本体机构基本上分为类。
B、 23、轮式移动机构具有以下特点?B、可靠性比较好4、轮式移动机构适用于在高速和高效地移动。
D、规则的硬路面上5、以下具有越障能力的轮系是。
A、锥形轮、变形车轮、半步行轮6、以下使用了曲柄滑块机构的是。
A、半步行轮和棘爪式车轮7、在变径轮和变形车轮的设计中,借鉴了的设计,使得车轮可以主动变形进行越障。
D、放缩机构8、连杆悬架系统和独立驱动轮系也成为目前的主流设计。
D、星球探测机器人9、沈阳自动化所研制的“灵蜥-H 型”排爆机器人属于。
B、混合式移动机器人10、相对而言,混合式移动机器人的。
A、自由度偏多、重量比较大1、具有无环境污染、易于控制、运动精度高、成本低和驱动效率高等优点,应用最为广泛。
C、电气驱动系统2、在响应快、载荷大的伺服系统中往往采用,原因是其输出力与质量比最大。
A、液压驱动3、驱动系统在原理上和液压驱动系统非常相似。
B、气压驱动系统4、步进电机驱动、直流伺服电机驱动、交流伺服电机驱动都属于。
C、电气驱动5、驱动具有大的转矩质量比和转矩体积比,没有电刷和整流子,运行时几乎不需要维护,在现代机器人中广泛应用。
A、交流伺服电机6、是一种用电脉冲信号进行控制,将电脉冲信号转换成相应的角位移或线位移的控制电机。
C、步进电机7、是一种定子、转子磁场均由软磁材料制成,只有控制绕组,基于磁导的变化产生反应转矩的步进电机, C、反应式步进电机8、是用直流供电的电机。
其功能是将输入的受控电压/电流能量转换为电枢轴上的角位移或角速度输出。
C、直流伺服电机9、直流伺服电机广泛应用在宽调速系统和精确位置控制系统中,其输出功率范围大约为。
A、 1~600 W10、常用来传递两交错轴之间的运动和动力,相比齿轮减速器,它具有更大的输出转矩。
B、蜗轮蜗杆减速器11、下图是减速器。
工业机器人技术及应用(教案)2-工业机器人的机械结构和运动控制一、机器人的机械结构1. 机器人的基本构造•机器人的基本构造包括:臂部、手部和控制系统•臂部是机器人的主体,由一系列连接的杆件和关节构成,可用于控制机器人的姿态和位置•手部包含各种工具和夹具,可以用于各种生产和制造任务•控制系统包括计算机、传感器和执行器,用于控制机器人的运动和操作任务2. 关节类型•机器人的关节可分为旋转关节和平移关节•旋转关节可以使机器人沿着轴旋转,常用于拾取和放置物品的任务•平移关节可以使机器人沿着轴移动,常用于加工任务3. 机械臂•机械臂是机器人的核心部分,通常由6个旋转关节组成•机械臂的材料通常是铝合金或碳纤维,以保证强度和轻量化•机械臂的末端装有工具或夹具,以进行各种操作任务二、机器人的运动控制1. 运动规划•运动规划是制造机器人进行操作任务的一个重要部分•运动规划可以精确计算机器人的轨迹和姿态,以达到完成任务的目的•运动规划分为离线运动规划和在线运动规划2. 控制系统•控制系统是用于控制机器人运动的核心部分•控制系统包括控制器、传感器和执行器•控制器负责计算机器人的位置和姿态,并控制执行器完成任务•传感器用于检测机器人周围环境的变化•执行器通常使用电机或液压驱动系统,以驱动机械臂进行运动和操作任务3. 轨迹控制•轨迹控制是控制机器人运动的一个重要部分•轨迹控制可以实现精确控制机械臂的速度、加速度和位置•轨迹控制可以通过控制硬件和软件实现三、工业机器人的应用1. 应用领域•工业机器人广泛应用于自动化生产线、汽车制造、电子产品制造等领域•工业机器人可以减少劳动力成本,提高生产效率,降低事故率•工业机器人的应用范围不断扩大,也在人类生产中扮演越来越重要的角色2. 应用案例•工业机器人在汽车制造中的应用,可以实现大规模生产,提高生产效率•工业机器人在电子产品制造中的应用,可以提高制造质量、提高生产效率,并减少原料浪费•工业机器人也在生物医药和军事领域得到应用,如手术机器人和无人机等四、小结本文较为详细地介绍了工业机器人的机械结构和运动控制,以及应用领域和案例。
财务机器人使用的流程应用1. 简介财务机器人是一种能够自动执行财务相关任务的软件程序,其通过智能算法和自动化技术,可以实现财务数据的收集、处理和分析。
本文档将介绍财务机器人的使用流程应用。
2. 流程一:财务数据收集财务机器人可以帮助企业快速收集财务数据,并将其整合成有用的报表。
以下是财务数据收集的基本流程:•准备数据收集模板:根据企业的需求,财务团队可以事先制定数据收集模板,包括需要收集的数据类型和格式。
•数据收集:财务机器人可以通过自动化方式,从不同的数据源(如ERP系统、电子表格等)收集财务数据,并将其导入到统一的数据仓库中。
•数据清洗和校验:财务机器人可以通过智能算法,对收集到的数据进行清洗和校验,确保数据的准确性和完整性。
•数据整合和报表生成:财务机器人可以将收集到的数据整合成有用的报表,如财务报表、预算报告等,以支持财务决策。
3. 流程二:财务数据处理财务机器人可以帮助企业自动处理财务数据,提高处理效率和准确性。
以下是财务数据处理的基本流程:•数据录入:财务机器人可以通过人工智能技术,自动识别和录入财务凭证,如发票、收据等,减少人工录入的工作量。
•数据分类和归档:财务机器人可以通过智能算法,自动对财务凭证进行分类和归档,便于后续查询和审计。
•数据计算和分析:财务机器人可以通过自动化技术,对财务数据进行计算和分析,生成财务指标和报告,如资产负债表、利润表等。
•数据审计和调整:财务机器人可以帮助企业进行财务数据的审计和调整,发现潜在的错误和问题,并及时进行修正。
4. 流程三:财务数据分析财务机器人可以帮助企业进行财务数据的深入分析,提供有价值的信息和建议。
以下是财务数据分析的基本流程:•数据预处理:财务机器人可以对财务数据进行预处理,包括去除异常值、填补缺失值等,以提高数据的可靠性和准确性。
•数据可视化:财务机器人可以将财务数据以图表的形式展示,便于财务团队和管理层进行数据的可视化分析。
•数据挖掘和建模:财务机器人可以通过数据挖掘和建模技术,发现数据中的潜在规律和关联性,提供有价值的洞察和建议。