增量调制系统的设计和仿真
- 格式:doc
- 大小:547.00 KB
- 文档页数:11

增量调制的发展研究及Matlab仿真实现随着通信技术的不断发展,增量调制技术已经成为数字通信领域中的重要技术之一。
本文将从增量调制技术的历史沿革、原理及其在实际中的应用等方面进行探讨,并最终使用Matlab 软件进行仿真实现。
一、增量调制技术历史沿革增量调制技术的起源可以追溯到1960年代,当时加拿大的一位工程师首次应用“二进制增量调制”技术,与此同时,英国工程师也在同一时期提出了一种新的调制信号方案,该方案使用较低的比特率传输音频。
历经多年的研究和实践,增量调制技术在通信领域中得到了广泛应用,并在数字广播、数字电视、数字移动通信等领域中得到了成功应用。
二、增量调制技术原理增量调制技术的原理是将模拟信号转换为数字信号,具体操作为通过采样和量化将模拟信号离散化为数字信号,在数字信号中引入增量调制技术进行信息的传输。
通过增量调制技术,信号的码率可以大大降低,从而提高了数据的传输速率和精度,同时还可以减小信号的噪声干扰,提高数字信号的传输质量。
三、增量调制技术实际应用在实际应用中,增量调制技术得到了广泛应用。
在数字广播领域中,增量调制技术可以有效地提高广播信号的传输效果,减少了信号失真和噪声干扰。
在数字电视领域中,增量调制技术可以使电视信号更加清晰,同时还可以采用不同的传输方式进行数字信号的传输和接收。
在数字移动通信领域中,增量调制技术可以有效地提高通信信号的稳定性和传输效率,同时还可以实现多种通信方式的操作。
四、增量调制技术的Matlab仿真实现为了更好地了解增量调制技术,在此我们以Matlab为例进行仿真实现。
首先,在Matlab中进行数字信号的采集和量化,然后将信号进行增量调制处理,并将处理后的信号进行解调处理得到输出信号,最后通过相应的性能分析可以得到信号的误码率、信噪比等性能指标。
综上所述,增量调制技术在数字通信领域中扮演着重要的角色。
通过对增量调制技术的研究和实践,我们可以更好地理解数字通信的原理和技术实现,为数字通信技术的发展提供更加坚实的基础和支持。
【关键字】系统增量调制编码系统实验报告篇一:实验十增量调制编译码系统实验实验报告课程名称通信原理实验成绩指导教师栗海生实验十增量调制编译码系统实验院系信息工程学院班级08电信二班学号姓名日期XX年12月25日一、实验目的1.掌握增量调制编译码的基本原理,并理解实验电路的工作过程。
2.了解不同速率的编译码,以及低速率编译码时的输出波形。
二、实验所用仪器1.双踪示波器2.信号发生器3.通信原理实验箱三、实验电路工作原理增量调制编码实验并画出波形。
(2)用外加信号源输入音频信号,保持f = 800Hz不变,改变信号幅度再重复观测TP201~TP205各点波形。
(3)输入音频信号保持幅度不变,改变信号的频率再逐点观测TP201~TP205各点波形。
(4)用外加信号源输入音频信号,保持f = 800Hz不变,幅度也保持不变,而改变工作时钟频率,即由开关K201来选择时钟信号,即:1脚与2脚相连为64KHz;2脚与3脚相连为32KHz;5脚与6脚相连为16KHz;6脚与7脚相连为8KHz;再观测TP201~TP205各点波形,如图8-6与图8-7所示。
并分析尝试结果。
同时要注意时间相位关系。
五、实验步骤及注意事项1. 做增量调制编码时,跳线开关接通设置:K201:调制电路工作时钟开关。
1—2:64KHz方波时钟;2—3:32KHz方波时钟;5—6:16KHz方波时钟;6—7:8KHz方波时钟。
K801:解调电路工作时钟选择开关。
1—2:64KHz方波时钟;2—3:32KHz方波时钟;5—6:16KHz方波时钟;6—7:来自PSK的32KHz方波时钟。
J801:1—2:增量调制编码电路的数字信号输出波形;5—6:来自PSK解调电路的数字基带信码。
注意:解调工作时钟应与调制工作时钟一致。
因此,单独调制时可有四种工作时钟可选;解调时,只有三种工作时钟可选。
2.不加音频信号输入时,测量TP201-TP205各点波形,特别注意TP202、TP205两点波形。

增量调制实验报告增量调制(Incremental Modulation)是一种常见的调制技术,在通信领域中得到广泛应用。
本文将介绍增量调制的原理、实验过程以及实验结果的分析。
一、实验目的本次实验的目的是通过搭建增量调制实验平台,了解增量调制的原理,掌握增量调制的实验方法,并通过实验结果分析增量调制的性能。
二、实验原理增量调制是一种将模拟信号转换为数字信号的调制技术。
它通过将模拟信号的变化量进行量化,并将量化结果编码成数字信号。
增量调制的核心思想是只传输信号的增量部分,而不传输信号的绝对值。
实现增量调制的关键是量化和编码。
量化是将连续的模拟信号离散化为有限个取值,常用的方法有均匀量化和非均匀量化。
编码是将量化后的信号映射为数字信号,常用的编码方式有脉冲编码调制(PCM)和差分脉冲编码调制(DPCM)。
三、实验材料与仪器本次实验所需材料与仪器包括信号发生器、示波器、模数转换器(ADC)、计算机等。
四、实验步骤1. 将信号发生器的输出信号接入模数转换器的输入端。
2. 设置信号发生器的输出频率和幅度,调节至所需的模拟信号。
3. 将模数转换器的输出信号接入示波器,观察信号的波形。
4. 将示波器的输出信号通过计算机进行数据采集和处理。
5. 根据采集到的数据,进行增量调制的解调和分析。
五、实验结果与分析通过实验,我们得到了增量调制后的数字信号。
通过对数字信号进行解调和分析,我们可以得到模拟信号的重构结果。
在实验中,我们可以观察到增量调制后的信号相比于原始模拟信号,存在一定的失真。
这是由于量化和编码过程中引入的误差所致。
误差的大小与量化精度和编码方式有关。
当量化精度较高、编码方式较优时,失真程度会减小。
此外,我们还可以通过改变量化精度和编码方式来观察增量调制的性能变化。
当量化精度较低时,信号的失真程度会增加,但传输的数据量会减少。
而当量化精度较高时,信号的失真程度会减小,但传输的数据量会增加。
因此,在实际应用中需要权衡传输质量和数据传输量之间的关系。

增量调制原理实验指导书增量调制原理实验一、实验目的1、了解增量调制系统的组成及原理。
2、研究系统性能指标及各部分波形。
3、研究各部分参数对系统性能的影响。
4、研究理论与工程模型之间的关系。
二、实验原理简单增量调制、解调系统是继PCM之后的又一种模拟信号的数字化方法,最大特点是实现容易,在低比特率时信噪比好,实验系统主要由以下部分组成。
1、模拟信源可产生系统正弦波,方波,锯齿波等典型模拟信号波形。
2、二值量化器对模拟信号抽样后进行二值量化并作为双极性NRZ码输出,3、脉冲发生器由于双极性二元量化量是一种±幅值输出的标准脉冲发生器,因此只须加一放大器,就可以构成增量脉冲发生器。
4、积分器本系统采用理想积分器,实际工程应用中用有源积分,或无源又C或LC积分器,均可在本系统的应用环境中很好的近似理想积分。
5、输出滤波器本系统提供参数可调滤波器,其类型,阶数及上下截止频率,均由实验人员自行设定。
本实验系统设定两种系统实验,简单增量调制及积分总和增量调制。
三、实验步骤1、开机进入Windows桌面。
2、双击桌面上的MATLAB快捷图标,进入命令窗。
3、键入:C102,进入仿真实验界面。
4、选择Increment Modulation实验类型,这时在具体实验项目栏中列出该实验所包含的具体各项实验。
5、选择Increment Modulation实验,再按下RUN一按钮,即进入该实验框图界面。
6、设置标准信号参数信号发生器波形:距齿波、幅度1V、频率1HZ;抽样量化器:抽样率0.001秒:脉冲发生器:幅值10滤波器:类型LPF,截止频率5*2*PI,3阶。
7、选择simulation菜单下的Start即可开始该实验的仿真运行。
实验记录:1)观察记录输入及输出波形2)回答,在本系统中的增量值为多少?8、改变脉冲发生器的幅值1)减小到1,观察记录解调波形回答:这时波形发生了什么变化,为什么会发生这种变化。

增量总和调制的MATLAB仿真摘要增量调制简称ΔM或增量脉码调制方式(DM)它是继PCM后出现的又一种模拟信号数字化的方法。
本文在增量调制的基础上,设计并仿真了增量调制的改进方案:增量总和调制也叫Δ-ΣM(delta-sigma modulation,DSM),通过对输入和输出信号差值用一个积分器进行积分的方式,实现了AD变换,恢复了原始信号。
关键词:增量总和,增量调制,matlab仿真引言增量脉码调制(DM),是一种以带宽换取速率的AD变换方式,其中,调制信号是差值信号.由于DM调制中存在严重的弊端,如输入信号含有较高的高频成分,或是信号幅度较大,都会使得信号变化特性较快,从而预测信号X’(t)无法正确跟踪输入信号,最终导致信号失真。
本文考虑从信号本身出发来解决问题,首先对信号进行一次积分,改变信号特性,使信号高频分量的幅度降低,之后再进行DM调制。
一.技术参数和设计目标设计一个增量总和调制系统对输入信号X(t)=Sin(1600*pi*t);编码输出并解调,抽样频率为8khz。
二.增量总和调制的原理增量总和调制是建立在增量调制的基础上,对输入信号进行积分,增量调制的实质是对增量进行积分,从而降低了输入的高频分量,从而防止了过载问题。
e(t)误差信号:通过一位量化器得到的输出信号Y(n)。
原理图为下在上图中,输入输出信号的积分用一个积分器就能解决,所以改进后的原理图如下:在输出端,由于对y(t)进行积分以后,得到的是dttx)(,再对其进行微分,得到x(t),因此可以省去积分器和微分器,经过低通滤波器(截止频率1600HZ)以后还原出原信号。
方案一:Simulink仿真1.增量总和调制的仿真模型及其框图在simulink 中的仿真图形如下:对差值e(t)进行采样以后送入量化器,最终通入一个阶数为2截止频率为1600Hz的低通butterworth滤波器中。
2.仿真的结果及其分析第一行为输入的正弦信号,第二行为调制后的输出波形,第三行为解调以后的波形,可以看到,解调后的输出略有延迟,基本上还原了原信号,而调制后的信号在正弦信号0处变得密集,在1,-1处而稀疏。
增量调制系统一、实验目的1. 掌握利用systemview进行仿真的方法;2. 理解增量调制编译码的原理;3. 理解自适应增量调制的原理。
二、实验仪器电脑,systemview5.0软件三、实验原理增量调制简称ΔM或DM,它是继PCM后出现的有一种模拟信号数字传输的方法,可以看成是DPCM的一个重要特例。
其目的在于简化语音编码方法。
ΔM与PCM虽然都是用二进制代码去表示模拟信号的编码方式。
但是,在PCM中,代码表示样值本身的大小,所需码位数较多,从而导致编、译码设备复杂;而在ΔM中,它只用一位编码表示相邻样值的相对大小,从而反映出抽样时刻波形的变化趋势,与样值本身的大小无关。
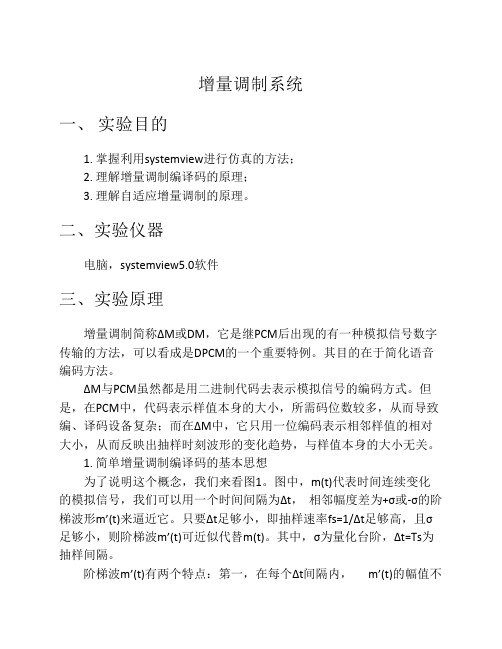
1. 简单增量调制编译码的基本思想为了说明这个概念,我们来看图1。
图中,m(t)代表时间连续变化的模拟信号,我们可以用一个时间间隔为Δt,相邻幅度差为+σ或-σ的阶梯波形m’(t)来逼近它。
只要Δt足够小,即抽样速率fs=1/Δt足够高,且σ足够小,则阶梯波m’(t)可近似代替m(t)。
其中,σ为量化台阶,Δt=Ts为抽样间隔。
阶梯波m’(t)有两个特点:第一,在每个Δt间隔内,m’(t)的幅值不变;第二,相邻间隔的幅值差不是+σ(上升一个量化阶),就是-σ(下降一个量化阶)。
利用这两个特点,用“1”码和“0”码分别代表m’(t)上升或下降一个量化阶σ,则m’(t)就被一个二进制序列表征(见图8 -1横轴下面的序列)。
于是,该序列也相当表征了模拟信号m(t),实现了模/数转换。
除了用阶梯波m’(t)近似m(t)外,还可用另一种形式——图中虚线所示的斜变波m1(t)来近似m(t)。
斜变波m1(t)也只有两种变化:按斜率σ/Δt 上升一个量阶和按斜率-σ/Δt下降一个量阶。
用“1”码表示正斜率,用“0”码表示负斜率,同样可以获得二进制序列。
由于斜变波m1(t)在电路上更容易实现,实际中常采用它来近似m(t)。
图1 增量编码波形示意图与编码相对应,译码也有两种形式。
增量调制(DM)实验一、实验目的(1)进一步掌握MATLAB的应用。
(2)进一步掌握计算机仿真方法。
(3)学会用MATLAB软件进行增量调制(DM)仿真实验。
二、实验原理增量调制是由PCM发展而来的模拟信号数字化的一种编码方式,它是PCM的一种特例。
增量调制编码基本原理是指用一位编码,这一位码不是表示信号抽样值的大小,而是表示抽样幅度的增量特性,即采用一位二进制数码“1”或“0”来表示信号在抽样时刻的值相对于前一个抽样时刻的值是增大还是减小,增大则输出“1”码,减小则输出“0”码。
输出的“1”,“0”只是表示信号相对于前一个时刻的增减,不表示信号的绝对值。
增量调制最主要的特点就是它所产生的二进制代码表示模拟信号前后两个抽样值的差别(增加、还是减少)而不是代表抽样值本身的大小,因此把它称为增量调制。
在增量调制系统的发端调制后的二进制代码1和0只表示信号这一个抽样时刻相对于前一个抽样时刻是增加(用1码)还是减少(用0码)。
收端译码器每收到一个1码,译码器的输出相对于前一个时刻的值上升一个量化阶,而收到一个0码,译码器的输出相对于前一个时刻的值下降一个量化阶。
增量调制(DM)是DPCM的一种简化形式。
在增量调制方式下,采用1比特量化器,即用1位二进制码传输样值的增量信息,预测器是n-1% ch6example13prog1.mTs=1e-3; %采样间隔t=0:Ts:20*Ts; %仿真时间序列x=sin(2*pi*50*t)+0.5*sin(2*pi*150*t); %信号delta=0.4; %量化阶距D(1+length(t))=0; %预测器初始状态for k=1:length(t)e(k)=x(k)-D(k); %误差信号e_q(k)=delta*(2*(e(k)>=0)-1); %量化器输出D(k+1)=e_q(k)+D(k); %延迟器状态更新codeout(k)=(e_q(k)>0); %编码输出endsubplot(3,1,1);plot(t,x,'-o');axis([0 20*Ts,-2 2]);hold on;subplot(3,1,2);stairs(t,codeout);axis([0 20*Ts,-2 2]);%解码端Dr(1+length(t))=0; %解码端预测器初始状态for k=1:length(t)eq(k)=delta*(2*codeout(k)-1); %解码xr(k)=eq(k)+Dr(k);Dr(k+1)=xr(k); %延迟器状态更新endsubplot(3,1,3);stairs(t,xr);hold on; %解码输出subplot(3,1,3);plot(t,x); %原信号五、实验结果图二六、结果分析程序执行结果如图二所示。
设计与应用计算机测量与控制.2003.11(12) Computer Measurement &Control ・997・收稿日期:2003-06-21。
基金项目:云南省自然科学基金项目(FOO40M)作者简介:轩素静(1975-),女,新疆乌鲁木齐市人,硕士,主要从事个人通信方面的研究。
文章编号:1671-4598(2003)12-0997-04 中图分类号:T N 912.31 文献标识码:B自适应增量调制的仿真实现及性能分析轩素静,邵玉斌(昆明理工大学信息工程与自动化学院,云南昆明 650051)摘要:讨论模数转换和压缩编码的一种重要方法-自适应增量调制(ADM )的性能。
先对DM 技术进行了研究,由于DM 存在一些不足,在DM 技术的基础上又引入了ADM 技术。
建立ADM 系统的模型,采用后向反馈自适应算法-步长的自适应调整基于信源信号波形的量化样值的幅度。
使用MAT LAB 仿真实现并根据仿真结果分析其性能。
提出ADM 能够自动跟踪快速变化的信号波形,比DM 具有更良好的SNR 性能和更大的动态范围,在很低的速率上就能给出高的编码质量,如32kbit /s 甚至是16kbit /s 。
从而节省了带宽。
关键词:增量调制;自适应增量调制;模数转换;压缩编码;预测编码;波形编码;连续可变斜率增量调制Realization and Performance Analysis for Adaptive Delta ModulationXUAN Su -jing ,SHA O Yu -bin(Depart ment of Infor mation Engineer ing and A ut omatics,K unming Science and T echnolo gy U niver sity ,Kunming 650051,China)Abstract :An impor tant method of analo g /digital co nv ersion a nd co mpression code w hich is called adaptive delta mo dula-tio n (AD M )is discussed.T he metho d called delta modulat ion (D M )and t he A DM fo r o ver co ming so me disadvantag es of the DM a re presented.T he models o f the AD M system is set up thr oug h t he backwa rd feedback alg or ithm.T he per for mance o f the A DM is and py zed accor ding to the result of the r ealizat ion.T his scheme can follow signal w hen it changes to o r apidly.A nd it has better SN R per for mance and wider dynamic rang e than delt a mo dulatio n (DM ).A DM can ther efor e o per ate at much low er bit r ates than DM ,ty pically 32kbit/s a nd ex ceptionally 16kbit /s,then sav e the bandw idth.Key words :delta modulation (DM );adapt ive delta mo dulatio n (A DM );analog /dig ital conver sio n (A /D);co mpr ession code;pr edict ion code;w ave code;continuously va ria ble slo pe delta modulat ion (CV SD )1 引言[1]实际上,无论有线还是无线语音通信都正在成为数字的。
1 Matlab软件简介1.1基本功能MATLAB是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。
它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。
MATLAB和Mathematica、Maple并称为三大数学软件。
主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
MATLAB的基本数据单位是矩阵,它的指令表达式与数学、工程中常用的形式十分相似,故用MATLAB来解算问题要比用C,FORTRAN等语言完成相同的事情简捷得多,并且MATLAB也吸收了像Maple等软件的优点,使MATLAB成为一个强大的数学软件。
在新的版本中也加入了对C,FORTRAN,C++,JAVA的支持。
可以直接调用,用户也可以将自己编写的实用程序导入到MATLAB函数库中方便自己以后调用,此外许多的MATLAB爱好者都编写了一些经典的程序,用户可以直接进行下载就可以用。
1.2应用MATLAB 产品族可以用来进行以下各种工作:数值分析、数值和符号计算、工程与科学绘图、控制系统的设计与仿真、数字图像处理技术、数字信号处理技术、通讯系统设计与仿真、财务与金融工程等。
MATLAB 的应用范围非常广,包括信号和图像处理、通讯、控制系统设计、测试和测量、财务建模和分析以及计算生物学等众多应用领域。
附加的工具箱(单独提供的专用MATLAB 函数集)扩展了MATLAB 环境,以解决这些应用领域内特定类型的问题。
1.3发展历程20世纪70年代,美国新墨西哥大学计算机科学系主任Cleve Moler为了减轻学生编程的负担,用FORTRAN编写了最早的MATLAB。
1984年由Little、Moler、Steve Bangert合作成立了的MathWorks公司正式把MATLAB推向市场。
到20世纪90年代,MATLAB已成为国际控制界的标准计算软件。
2 原理知识在PCM系统中,为了得到二进制数字序列,要对量化后的数字信号进行编码,每个抽样量化值用一个码组(码字)表示其大小。
码长一般为7位或8位,码长越大,可表示的量化级数越多,但编、解码设备就越复杂。
我们看一下图1。
图中在模拟信号f(t)的曲线附近,有一条阶梯状的变化状曲线f′(t),f′(t)与f(t)的形状相似。
显然,只要阶梯“台阶”σ和时间间隔Δt足够小,则f′(t)与f(t)的相似程度就会提高。
对f′(t)进行滤波处理,去掉高频波动,所得到的曲线将会很好地与原曲线重合,这意味着f′(t)可以携带f(t)的全部信息(这一点很重要)。
因此,f′(t)可以看成是用一个给定的“台阶”σ对f(t)进行抽样与量化后的曲线。
我们把“台阶”的高度σ称为增量,用“1”表示正增量,代表向上增加一个σ;用“0”表示负增量,代表向下减少一个σ。
则这种阶梯状曲线就可用一个“0”、“1”数字序列来表示(如图(1)所示),也就是说,对f′(t)的编码只用一位二进制码即可。
此时的二进制码序列不是代表某一时刻的抽样值,每一位码值反映的是曲线向上或向下的变化趋势。
缩写为DM或ΔM调制。
增量调制最早由法国人De Loraine于1946年提出,目的是简化模拟信号的数字化方法。
其主要特点是:(1)在比特率较低的场合,量化信噪比高于PCM。
(2)抗误码性能好。
能工作在误比特率为102~103的信道中,而PCM则要求信道的误比特率为104~106。
(3)设备简单、制造容易。
(4)它与PCM的本质区别是只用一位二进制码进行编码,但这一位码不表示信图1 增量调制波形示意示tt二进制码序列编码后的数字信号3总体系统设计方案增量调制(DM)系统的设计,由ΔM的调制方案和ΔM的解调方案两个子方案组成。
通过发送端形成f′(t)信号并编制成相应的二元码序列, 比较在每个抽样时刻Δt处的f(t)和f′(t)的值, 用一个比较电路(减法器)来完成f(iΔt)和f′(iΔt_)的差值的比较;通过分析f′(t)的波形,阶梯波形象地说明增量调制原理,实际积分器的输出波形可以相应得到,最后完成设计与仿真。
4 子系统设计方案4.1 ΔM的调制方案如何在发送端形成f′(t)信号并编制成相应的二元码序列呢?仔细分析一上图(1),比较在每个抽样时刻Δt处的f(t)和f′(t)的值可以发现,当f(iΔt)>f′(iΔt_)时,上升一个σ,发“1”码;当f(iΔt)<f′(iΔt_)时,下降一个σ,发“0”码。
f′(iΔt_)是第i个抽样时刻前一瞬间的量化值。
根据上述分析,我们给出增量调制器框图如图2所示。
(a) 增量调制器(编码器)框图(b) RC积分器图2 增量调制原理框图f′(iΔt_)可以由编码输出的二进制序列反馈到一个理想的积分器以后得到。
由于该积分器又具有解码功能,因此又称为本地解码器(译码器)。
f(iΔt)和f′(iΔt_)的差值,可以用一个比较电路(减法器)来完成。
量化编码可以用一个双稳判决器来执行,并生成双极性二进制码序列。
具体调制过程描述如下:设f ′(0-)=0(即t=0时刻前一瞬间的量化值为零),因此有t=0时,e(0)=f(0)-f ′(0-)>0,则Po(0)=1 (1)t=Δt 时, e(Δt)=f(Δt)-f ′(Δt_)>0,则Po(Δt)=1 (2)t=2Δt 时,e(2Δt)=f(2Δt)-f ′(2Δt_)<0,则Po(2Δt)=0; (3)t=3Δt 时,e(3Δt)=f(3Δt)-f ′(3Δt_)>0,则Po(3Δt)=1; (4)t=4Δt 时,e(4Δt)=f(4Δt)-f ′(4Δt_)<0,则Po(4Δt)=0; (5)t=5Δt 时,e(5Δt)=f(5Δt)-f ′(5Δt_)>0,则Po(5Δt)=1; (6)t=6Δt 时,e(6Δt)=f(6Δt)-f ′(6Δt_)>0,则Po(6Δt)=1; (7)以此类推,即可得到如图3所示的波形。
会发现图3中的f ′(t)和图1的波形不一样。
其实,图1的阶梯波只是为了形象地说明增量调制原理,而实际积分器的输出波形如图3d 所示。
∆t 02∆t 3∆t 4∆t 5∆t 6∆t 7∆t 8∆t 9∆t 10∆t 11∆t 12∆t 13∆t 14∆t4.2 ΔM 的解调方案为了完成整个通信过程,发送端调制出的信号必须在接收端通过解调恢复出原始模拟信号。
ΔM 信号的解调比较简单,用一个和本地解码器一样的积分器即可。
在接收端和发送端的积分器一般都是一个RC 积分器。
解调过程就是图4―3中的积分过程。
当积分器输入“1”码时,积分器输出产生一个正斜变的电压并上升一个量化台阶σ;而当输入“0”码时,积分器输出电压就下降一个量化台阶σ。
为了保证解调质量,对解码器有两个要求:(1) 每次上升或下降的大小要一致,即正负斜率大小一样。
(2)解码器应具有“记忆”功能,即输入为连续“1”或“0”码时,输出能连续上升或下降。
对积分器的输出信号进行低通滤波,滤除波形中的高频成分,即可得到与原始模拟信号十分近似的解调信号,如图4所示图4 增量调制译码(解调)示意示5 仿真结果5.1增量调制Simulink 仿真采用Simulink 基本模块实现和采用DPCM 编解码模块实现。
仿真测试模型如图(6)所示。
仿真步进设置为0.001s ,模型中所有需要设置采样时间的地方均设置采样时间为0.001s 。
在增量调制部分,Relay 模块作为量化器适应,其门限设置为0,输出值分别设置为0.4和-0.4;Relay 作为编码器使用,其门限设置为0,输出值设置为1和0;解码端Relay2模块作为解码器使用,其门限设置为0.5,输出值分别为0.4和-0.4;使用单位延时器Unit Delay 作为预测滤波器,初始状态均设置为零。
(a) 增量解调器(译码器)框图(b) 各点波形使用DPCM编解码模块进行等价实现,DPCM编码模块的设置是,预测器分子系数为[0,1],分母系数是1,量化分割值为0,码书为[-0.4,0.4],解码器与编码器设置相同。
仿真时间设置为0.02s,即仿真前20个采样点。
仿真结果如图(7)所示,采用Simulink基本模块实现的解码结果与编程法得到的波形相同。
但是,由于初始值设置问题,采用DPCM编解码模块得出的解码结果与采用Simulink基本模块实现的解码结果在起始部分稍有不同,随着仿真时间的增加,两者输出结果相同。
图6增量调制编码仿真测试模型其中f(u)=sin(2*pi*50*u)+0.5*sin(2*pi*150*u)图7增量调制编码解码波形仿真结果(二)5.2 增量调制MATLAB的仿真5.2.1 仿真结果:程序执行结果如图5所示。
从图中原信号和解码结果对比看,在输入信号变化平缓的部分,编码器输出1、0交替码,相应的解码结果以正负阶距交替变化,形成颗粒噪声,称空载失真;在输入信号变化过快的部分,解码信号因不能跟踪上信号的变化而引起斜率过载失真。
量化阶距越小,则空载失真就越小,但是容易发生过载失真;反之,量化阶距增大,则斜率过载失真减小,但空载失真增大。
如果量化阶距能根据信号的变化缓急自适应调整,则可以兼顾优化空载失真和过载失真,这就是自适应增量调制的意思。
图5增量调制编码解码波形仿真结果(一)5.2.2 结果分析:第一个图形是原信号及离散样值第二个图形是编码输出二进制序列的波形第三个图形解码结果和信号波形对比0.004—0.006为空载失真部分0.009—0.012为过载失真部分5.3 存在的问题及分析5.3.1增量调制存在的问题增量调制尽管有前面所述的不少优点,但它也有两个不足:一个是一般量化噪声问题;另一个是过载噪声问题。
两者可统一称为量化噪声。
观察图1可以发现,阶梯曲线(调制曲线)的最大上升和下降斜率是一个定值,只要增量σ和时间间隔Δt 给定,它们就不变。
那么,如果原始模拟信号的变化率超过调制曲线的最大斜率,则调制曲线就跟不上原始信号的变化,从而造成误差。
我们把这种因调制曲线跟不上原始信号变化的现象叫做过载现象,由此产生的波形失真或者信号误差叫做过载噪声。
另外,由于增量调制是利用调制曲线和原始信号的差值进行编码,也就是利用增量进行量化,因此在调制曲线和原始信号之间存在误差,这种误差称为一般量化误差或一般量化噪声。