机械原理第七章讲述
- 格式:ppt
- 大小:1.44 MB
- 文档页数:13
第7章 机械的运转及其速度波动的调节7.1 复习笔记本章主要介绍了机械系统的等效动力学模型(等效转动惯量、等效力矩和等效构件)和速度波动及调节方法。
学习时需要重点掌握飞轮转动惯量的求解方法,常以计算题的形式考查,而且几乎每年必考。
除此之外,等效转动惯量、等效力矩的概念和计算等内容,常以选择题和填空题的形式考查,复习时需要把握其具体内容,重点记忆。
一、概述1.研究内容及目的(1)内容①研究机械在外力作用下的真实运动规律;②研究机械运转速度的波动及调节运转速度的方法。
(2)目的①对机构的运动和力进行精确的分析;②使机械的运转速度在许可的范围之内波动。
2.机械运转的三个阶段(见表7-1-1)表7-1-1 机械运转的三个阶段3.作用在机械上的驱动力和生产阻力(1)原动机的运动特性原动机的机械特性:各种原动机的作用力或力矩与其运动参数(位移、速度)之间的关系。
(2)解析法的特点①在用解析法研究机械在运动时的情况下,原动机的驱动力必须以解析式的形式表达;②为了简化计算,常将原动机的机械特性曲线近似地用简单的代数式来表示。
(3)生产阻力的特点①生产阻力取决于机械工艺过程;②生产阻力可以是常数,也可以是关于执行构件位置、速度或时间的函数。
二、机械的运动方程式(见表7-1-2)表7-1-2 机械的运动方程式1.等效转动惯量和等效力矩均为位置的函数(1)若等效力矩的函数形式M e =M e (φ)可以积分,且其边界条件已知,则等效构件的角速度和角加速度分别为ω=d d d d dt d dt d ωωϕωαωϕϕ==(2)初步估算①假设:等效力矩M e =常数,等效转动惯量J e =常数;②此时等效构件的角加速度和角速度分别为α=dω/dt=M e /J e ,ω=ω0+αt。
(3)当M e (φ)以线图或表格的形式呈现时,则求解只能运用数值积分法。
2.等效转动惯量是常数,等效力矩是速度的函数(1)求解tt 的表达式可表示为00()e e d t t J M ωωωω=+⎰式中,ω0是计算开始时的初始角速度,其余符号含义同前。
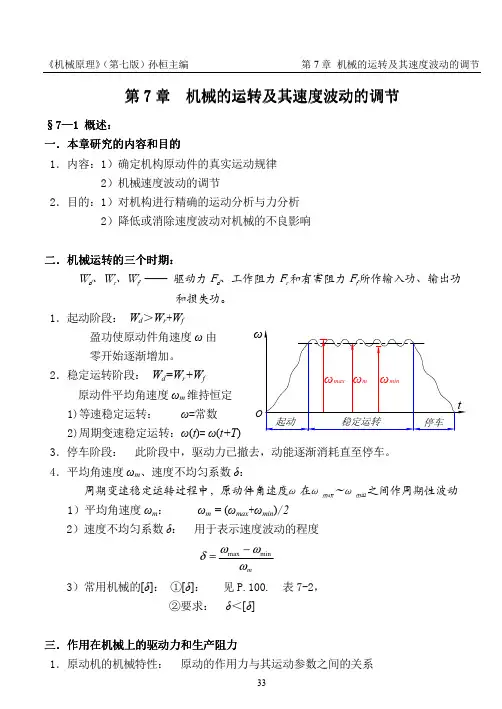
机械原理第七章第七章机械的运转及其速度波动的调节1一般机械的运转过程分为哪三个阶段在这三个阶段中,输入功、总耗功、动能及速度之间的关系各有什么特点?2为什么要建立机器等效动力学模型?建立时应遵循的原则是什么?3在机械系统的真实运动规律尚属未知的情况下,能否求出其等效力矩和等效转动惯量?为什么?4飞轮的调速原理是什么?为什么说飞轮在调速的同时还能起到节约能源的作用?5何谓机械运转的\平均速度\和\不均匀系数\?6飞轮设计的基本原则是什么?为什么飞轮应尽量装在机械系统的高速轴上?系统上装上飞轮后是否可以得到绝对的匀速运动?7机械系统在加飞轮前后的运动特性和动力特性有何异同(比较主轴的ωm,ωma某,选用的原动机功率、启动时间、停车时间,系统中主轴的运动循环周期、系统的总动能)?8何谓最大盈亏功?如何确定其值?9如何确定机械系统一个运动周期最大角速度Wma某与最小角速度Wmin所在位置?10为什么机械会出现非周期性速度波动,如何进行调节?11机械的自调性及其条件是什么?12离心调速器的工作原理是什么?13对于周期性速度波动的机器安装飞轮后,原动机的功率可以比未安装飞轮时小14若不考虑其他因素,单从减轻飞轮的重量上看,飞轮应安装在高速轴上。
15大多数机器的原动件都存在运动速度的波动,其原因是驱动力所作的功与阻力所作的功不能每瞬时保持相等。
16机器等效动力学模型中的等效质量(转动惯量)是根据系统总动能相等的原则进行转化的,因而它的数值除了与各构件本身的质量(转动惯量)有关外,还与构件的运动规律有关。
17当机器中仅包含速比为常数的机构时,等效动力学模型中的等效质量(转动惯量)是常数;若机器中包含单自由度的机构时,等效质量(转动惯量)是机构位置的函数。
18图示行星轮系中,各轮质心均在其中心轴线上,已知J10.01kgm2,J20.04kgm2,J20.01kgm2,'.kgm2,行星轮质系杆对转动轴线的转动惯量JH018HH量m2=2kg,m2'=4kg,lH0.3m,i1H3,i121。
十、机械的稳定运转及其速度波动的调节1.设某机器的等效转动惯量为常数,则该机器作匀速稳定运转的条件是,作变速稳定运转的条件是。
2.机器中安装飞轮的原因,一般是为了,同时还可获得的效果。
3.在机器的稳定运转时期,机器主轴的转速可有两种不同情况,即稳定运转和稳定运转,在前一种情况,机器主轴速度是,在后一种情况,机器主轴速度是。
4.机器中安装飞轮的目的是和。
5.某机器的主轴平均角速度ωm=100rad/s,机器运转的速度不均匀系数δ=0.05,则该机器的最大角速度ωmax等于rad/s,最小角速度ωmin等于rad/s。
6.某机器主轴的最大角速度ωmax=200rad/s,最小角速度ωmin=190rad/s,则该机器的主轴平均角速度ωm等于rad/s,机器运转的速度不均匀系数δ等于。
7.机器等效动力学模型中的等效质量(转动惯量)是根据的原则进行转化的,因而它的数值除了与各构件本身的质量(转动惯量)有关外,还与。
8.机器等效动力学模型中的等效力(矩)是根据的原则进行转化的,等效质量(转动惯量)是根据的原则进行转化的。
9.机器等效动力模型中的等效力(矩)是根据的原则进行转化的,因而它的数值除了与原作用力(矩)的大小有关外,还与有关。
10.若机器处于起动(开车)阶段,则机器的功能关系应是,机器主轴转速的变化情况将是。
11.若机器处于停车阶段,则机器的功能关系应是,机器主轴转速的变化情况将是。
12.用飞轮进行调速时,若其它条件不变,则要求的速度不均匀系数越小,飞轮的转动惯量将越,在满足同样的速度不均匀系数条件下,为了减小飞轮的转动惯量,应将飞轮安装在轴上。
13.当机器运转时,由于负荷发生变化使机器原来的能量平衡关系遭到破坏,引起机器运转速度的变化,称为,为了重新达到稳定运转,需要采用来调节。
14.在机器稳定运转的一个运动循环中,运动构件的重力作功等于,因为。
15.机器运转时的速度波动有速度波动和速度波动两种,前者采用,后者采用进行调节。