5IEC61131-3编程标准解析
- 格式:ppt
- 大小:1.70 MB
- 文档页数:37
摘要针对当前控制系统编程语言的流行趋势,从基本编程元素和编程语言两个方面详细介绍了标准IEC61131-3的内容。
并且以浙大中自SunyTech工业控制应用软件平台为背景,对标准具体内容的应用作了针对性的阐述,充分展现了IEC61131-3标准在控制系统软件编程中的作用。
关键词IEC61131-3;软件模型;编程语言;工控编程软件;PLC;控制系统1 引言IEC(InternationalElectrotechnicalCommission)61131-3是第一个为工业自动化控制系统的软件设计提供标准化编程语言的国际标准。
该标准将现代软件的概念和现代软件工程的机制与传统的PLC编程语言成功地结合,又对各种工业控制系统的编程语言、软件设计的概念和软件模型等进行了标准化,适应了当今世界软件、工业控制系统的发展方向,是一种非常先进的设计技术。
2标准的主要内容[1][2]IEC61131-3将标准分为两个部分:公共元素和编程语言。
IEC61131-3标准的层次和结构如图1所示。
图1IEC61131-3标准的结构图公共元素部分规范了数据类型、变量的定义,给出了软件模型,并引入配置(Configuration)、资源(Resources)、任务(Tasks)和程序(Program)的概念、程序组织单元POU(PorgramOrganizitionUnit)和顺序功能图SFC(SequentialFunctionChart)等。
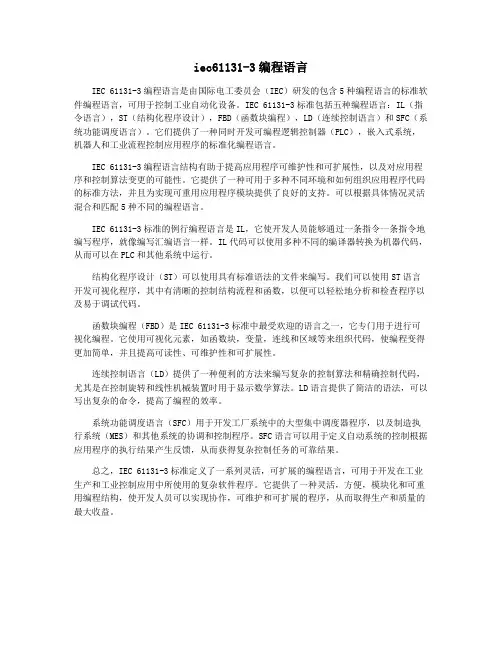
IEC61131-3标准共规定了4种编程语言,其中两种图形化语言,两种文本化语言。
图形化语言有梯形图LD(LadderDiagram),功能块图FBD(FunctionBlockDiagram);文本化语言有指令表IL(InstructionList)和结构文本ST(StructuredText)。
2.1 基本编程概念和公共元素1)软件模型IEC61131-3标准的软件模型如图2所示。
![IEC611313]的5种标准编程语言](https://uimg.taocdn.com/4c30c6037dd184254b35eefdc8d376eeaeaa1765.webp)



IEC61131-3《编程语言》及其对工业控制编程语言发展的影响IEC61131-3《编程语言》及其对工业控制编程语言发展的影响工业控制编程语言在现代工业自动化系统中起着至关重要的作用。
这些编程语言帮助工程师们设计、开发和管理各种自动化过程,提高生产效率和质量。
IEC61131-3《编程语言》是一个重要的标准,对工业控制编程语言的发展产生了深远的影响。
本文将介绍IEC61131-3标准的主要特点和其对工业控制编程语言发展的影响。
IEC61131-3是由国际电工委员会(IEC)于1993年发布的一个标准,用于规定工业控制系统软件的编程语言和编程方法。
标准包括了五种编程语言,分别是梯形图(Ladder Diagram,LD)、功能块图(Function Block Diagram,FBD)、序列图(Sequential Function Chart,SFC)、结构化文本(Structured Text,ST)和运动控制函数图(MotionControl Function Block Diagram,MCFBD)。
这些编程语言广泛应用于工业控制系统中,成为工程师们编写自动化过程的标准工具。
首先,IEC61131-3标准提供了一种统一的编程语言和开发环境,极大地方便了不同厂家和工程师之间的协作和交流。
在此之前,每个厂家都有自己的专有编程语言和软件工具,互相之间不兼容。
这给项目开发和维护带来了很大的困扰。
而IEC61131-3的出现,解决了这个问题,使得不同厂家的控制系统之间可以无缝集成,实现协作开发和资源共享。
这大大加快了工业控制系统的开发进度,提高了整体效率。
其次,IEC61131-3标准提供了一种面向对象编程(Object-Oriented Programming,OOP)的思想。
在传统的工业控制编程语言中,程序的开发和管理较为繁琐,难以进行模块化设计和复用。
而OOP思想使得编程更加灵活,能够将程序划分为多个对象,并通过继承和多态等机制实现函数和数据的封装和管理。
iec61131-3编程语言IEC 61131-3编程语言是由国际电工委员会(IEC)研发的包含5种编程语言的标准软件编程语言,可用于控制工业自动化设备。
IEC 61131-3标准包括五种编程语言:IL(指令语言),ST(结构化程序设计),FBD(函数块编程),LD(连续控制语言)和SFC(系统功能调度语言)。
它们提供了一种同时开发可编程逻辑控制器(PLC),嵌入式系统,机器人和工业流程控制应用程序的标准化编程语言。
IEC 61131-3编程语言结构有助于提高应用程序可维护性和可扩展性,以及对应用程序和控制算法变更的可能性。
它提供了一种可用于多种不同环境和如何组织应用程序代码的标准方法,并且为实现可重用应用程序模块提供了良好的支持。
可以根据具体情况灵活混合和匹配5种不同的编程语言。
IEC 61131-3标准的例行编程语言是IL,它使开发人员能够通过一条指令一条指令地编写程序,就像编写汇编语言一样。
IL代码可以使用多种不同的编译器转换为机器代码,从而可以在PLC和其他系统中运行。
结构化程序设计(ST)可以使用具有标准语法的文件来编写。
我们可以使用ST语言开发可视化程序,其中有清晰的控制结构流程和函数,以便可以轻松地分析和检查程序以及易于调试代码。
函数块编程(FBD)是IEC 61131-3标准中最受欢迎的语言之一,它专门用于进行可视化编程。
它使用可视化元素,如函数块,变量,连线和区域等来组织代码,使编程变得更加简单,并且提高可读性、可维护性和可扩展性。
连续控制语言(LD)提供了一种便利的方法来编写复杂的控制算法和精确控制代码,尤其是在控制旋转和线性机械装置时用于显示数学算法。
LD语言提供了简洁的语法,可以写出复杂的命令,提高了编程的效率。
系统功能调度语言(SFC)用于开发工厂系统中的大型集中调度器程序,以及制造执行系统(MES)和其他系统的协调和控制程序。
SFC语言可以用于定义自动系统的控制根据应用程序的执行结果产生反馈,从而获得复杂控制任务的可靠结果。
IEC61131-3标准及其实现IEC61131-3标准的基本概念和定义IEC61131-3对下述三个方面进行了描述和定义:1、块的概念,2、PLC的配置,3、编程系统应具备的基本功能。
一、块的概念由POU(Program Organization Unit)构成的程序和项目称之为块(Blocks),POU与传统PLC世界中的程序块、组织块、顺序快、功能块相对应。
IEC61131-3标准的一个非常重要的目的就是限制块的种类及其隐含的意义,以便统一和简化它们的用法。
为此,标准定义了三种类型的POU,分别如下:POU类型意义程序(PROG)主程序,包括指定的I/O、全局变量和存取路径功能块(FB)拥有输入/输出变量的块,是最常用的POU类型函数(FUN)带有函数值的块,作为PLC基本操作集的扩展三种POU的区别在于:函数(FUN)函数POU可以指定参数,但没有静态变量也就是没有存储空间,在用相同的输入参数调用函数时总是返回相同的结果。
功能块(FB)功能块POU即可以指定参数,也有静态变量,在用相同的参数调用功能块时,返回值取决于内部变量和外部变量,并能将内部变量保持到下一个执行周期。
程序(PROG)此类POU代表“主程序”,整个程序的所有变量(包括指定的物理地址)都应该在此POU(或资源、配置)中声明,其他方面与功能块POU类似。
POU 是个封装的单元,可以独立地编译,并作为其他程序的部件,经编译的POU可以连接在一起组成完整的程序。
POU 的名字在整个项目中是唯一的、全局的。
局部子程序在IEC61131-3中是禁止的,经编程之后的POU,其名字和调用接口对项目中其他所有的POU是已知的。
POU 的这种独立性大大方便了自动化任务的模块化以及可以重复使用已经获得良好测试和执行的软件单元。
编写PLC程序实际上就是构造功能块(FB)和程序块。
大多数情况,PLC已经预先构造和测试好了大量的功能块(如:定时器和计数器),用户只要将系统提供的功能块按照逻辑要求组织成程序即可。
Bachmann-PLC-IEC61131-编程指导IEC61131-3编程标准化介绍(Bachmann PLC编程语言介绍)一,IEC61131-3编程语言的分类常用的PLC编程语言分为:IL(语句表),LD(梯形图),FBD(功能图),SFC(顺控图),CFC(改进的功能图),ST(类似于C 语言,可以用记事本文件打开)。
二,各种语言的功能使用列举1,IL语句表(没有实用价值,略)2,LD梯形图(1),实现逻辑运算与运算(当a1,a2全部为TRUE时候,b1为TRUE。
)或运算(当a1,a2有一个为TRUE时候,b1为TRUE。
)非运算(a1= =TRUE,a2= =FALSE,b1为TRUE)以上运算也可以用:AND,OR,来实现,如:RS,SR运算(有优先级的,RS为复位优先;SR置位优先)如:(a1= =TRUE,a2= =FALSE,b1为TRUE)(a1= =TRUE,a2= =TRUE,b1为FALSE)如:(a1= =TRUE,a2= =FALSE,b1为TRUE)(a1= =TRUE,a2= =TRUE,b1为TRUE)(2)实现算术运算其他常用的数学运算还有:EXP,EXPT,SIN,COS,TAN,ASIN,ACOS,ATAN。
还有常用的MOVE。
(3)脉冲运算F_TRIG,R_TRIG分别产生一个下降沿,上升沿;(4)计数器与定时器0001的含义是在程序上电时候,将a2置位为TRUE(第一个扫描周期,上电初始化程序可以参考该模式);当a2= =TRUE将其复位(第2及以后的扫描周期)。
0002的含义是:每3s钟t1导通一次(导通的次数由c1的设定来决定的),同时c1的次数当前数减少一次。
0003的含义是:t1导通一次以后,关断t1。
0004的含义是:导通次数达到设定数据以后,b2导通,同时关断t1。
TON:通电延时。
TOF:断电延时。
TP:产生一段时间脉冲,与R_TRIG相似(但TP有时间规定,R_TRIG为一个扫描周期)。