2012亚太机器人大赛比赛规则2
- 格式:pdf
- 大小:1.11 MB
- 文档页数:13
2012年亚太机器人大赛规则&主题Peng On Dai Gat追求繁荣和平向导1.每个参赛队有一个手动机器人,一个自动机器人以及一个馒头机器人。
2.手动操作上驾驶手动机器人到通行证站。
3.手动机器人拿起通行证到隧道口。
4.手动机器人将通行证放入隧道口的通行证盒子中。
5.自动机器人拿起公共区的篮筐放入手动区域。
6.手动机器人穿过隧道携带馒头机器人。
7.手动机器人在L1卸下馒头机器人。
自动机器人携带馒头机器人穿过桥,将馒头机器人卸载到L2或L3。
8.手动机器人拿起篮筐并放在岛上篮筐区域。
9.馒头机器人可以脱离自动机器人从L2爬上岛上的台阶,也可以从L3被手动机器人举起。
10.馒头机器人拿起底层和中间层的馒头并放入篮筐里。
11.下面2层每层至少有一个馒头已经放入篮筐,馒头机器人可以在被手动机器人举起的时候接触馒头塔顶层的馒头。
12.在比赛的最后一分钟,手动机器人可以伸长自己的手臂,直接去拿馒头塔最底层的馒头,并放入篮筐。
13.馒头机器人在将馒头塔下面2层每层至少一个馒头成功放入篮筐后,一旦成功的将顶层馒头放入篮筐,比赛立即结束。
这种类型的完成被称为“Peng On Dai Gat”。
14.如果任何一个队伍在3分钟之内都没有达成“Peng On Dai Gat”,则得分多的队伍获胜。
15.每场比赛3分钟。
比赛规则1.机器人设置1.1每个队伍允许使用:一个手动机器人、一个自动机器人和一个馒头机器人。
1.2在比赛开始之前有一分钟的时间让每个队伍设置机器人。
1.3每个队只允许有三名的操作手(包括手动操作手)能够上场设置机器人。
任何一个在规定一分钟时间内不能完成机器人设置的参赛队,可在比赛开始以后继续对机器人进行设置。
2比赛场地和道具2.1比赛场地尺寸为13000mm*13000mm,被高100mm、厚度为50mm的木栅栏所包围。
木栅栏用螺钉固定。
场地被高100mm、厚50mm的木栅栏平均分成两半,分别给红、蓝两队(图表1-4)。
2012亚太大学生机器人大赛国内选拔赛招新通知亚洲广播电视联盟亚太地区机器人大赛(简称ABU-ROBOCON,以下同)由亚太地区广播电视联盟(亚广联)发起,致力于培养各国青少年对于开发、研制高科技产品的兴趣与爱好,提高各参与国的科技水平,为机器人工业的发展发掘培养后备人才。
该赛事每年举办一次,自2002年第一届ABU-ROBOCON 在日本举办以来已经成功举办了十届。
每年的ABU-ROBOCON决赛由亚广联的成员国轮流承办,2012年第十一届ABU-ROBOCON国际赛将在中国香港举行。
每年一届的比赛,除承办国外,其他各国只能有一只参赛队代表本国出征ABU-ROBOCON国际赛。
CCTV2012亚太大学生机器人大赛国内选拔赛,正是为了选拔中国代表队而举办。
近年参加国内选拔赛的有北京航空航天大学、北京理工大学、上海交通大学、西安交通大学、华中科技大学、武汉大学、电子科技大学等40多所国内知名大学的代表队。
自2002年开始,北京邮电大学代表队在学校有关领导和老师的关心支持下,参加了第一届到第十届的亚太大学生机器人大赛国内选拔赛。
2002年攀登富士山顶2003年太空征服者2004年鹊桥相会2005年登长城,点圣火2006年修建双子高塔2007年下龙湾的传说2008年竞技牛郎2009年胜利鼓乐2010年辉煌金塔2011年祈福荷灯经过十年的比赛磨砺,我校机器人团队有了一定的技术积累,机电创新基地建设有了一定的规模,也形成了比较完善的组织管理模式。
取得了2次季军,5次八强,及最佳创意,最佳策略,最佳技术等多个技术专项奖,是国内赛场上一支闻名的传统强队。
亲们,你可曾体会过:当你自己亲手设计制作的机器人驰骋在比赛场上,完成一个个优美的动作时,在亿万人面前展示时,那心情是何等的激动?当置身舞台聚光灯下,注视着赛场上我们北邮机器人的佳绩时,是何等的荣耀?当亲手接过那沉甸甸的奖杯,是何等的自豪?当你置身于CCTV镜头下,想着远在故乡的父母、亲人在电视机前看到你的身影时,是何等的兴奋?这里的我们,渴望梦想和进步,珍视团队和协作,期盼再创荣耀和辉煌!你想体会上述激情彭湃的感觉吗?亲们,加入我们吧!2012年,是一个新的起点,新主题、新规则、新挑战,需要新思维、新策略、新技术,更需要新的血液注入,北京邮电大学机器人代表队面向全校招揽有识之士。
第十二届中国青少年机器人竞赛FLL机器人挑战赛主题与规则1. FLL机器人挑战赛简介FLL机器人挑战赛是一项青少年国际机器人比赛项目。
要求参加比赛的代表队自行设计、制作机器人并进行编程。
参赛的机器人可在特定的竞赛场地上,按照一定的规则进行比赛。
在中国青少年机器人竞赛中设置FLL机器人挑战赛的目的是激发我国青少年对机器人技术的兴趣,为国际FLL机器人挑战赛选拔参赛队。
2. 竞赛主题本届FLL挑战赛的主题为“食品安全”。
民以食为天,我们每天都离不开食品。
在原料生产、食品加工、包装、流通、销售等众多环节中,隐藏着许多不安全因素,你都清楚吗?食品安全问题有些是在我们不经意的情况下发生的,有些则是人为的。
近年来频发的食品安全事件应该引起我们对食品安全问题的足够重视了!在“食品安全”机器人比赛中,你的机器人的任务是提醒人们在进食之前避免和处理污染。
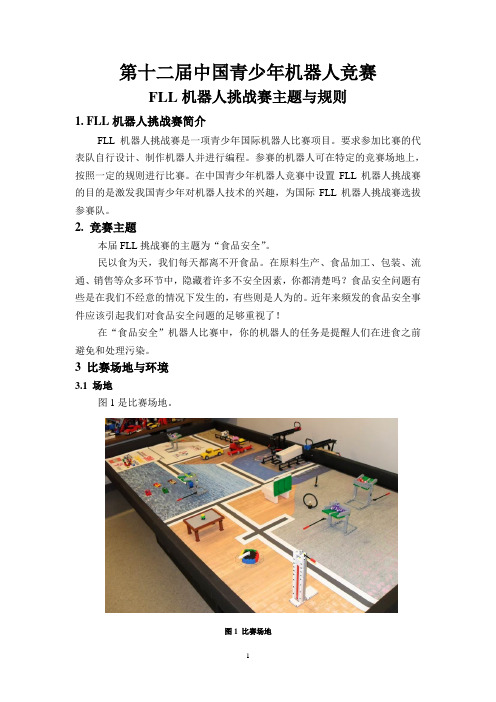
3 比赛场地与环境3.1 场地图1是比赛场地。
图1 比赛场地3.2 赛台3.2.1 赛台是进行机器人比赛的地方。
3.2.2 单个赛台的内部尺寸长为1143mm、宽2362mm,四周装有边框,高为82mm,厚度为38mm,赛台底板厚度为18mm,如图2所示。
边框内侧为黑色。
3.3.3 场地底板上铺有亚光场地膜,底色为白色。
场地膜上画有基地,比赛用的部分模型则布置在场地膜上。
场地膜(含黑边)的尺寸为1140mm、宽2356mm。
场地膜紧贴北面和东面的边框。
3.2.4 比赛时两张赛台背靠背放在一起,如图2所示。
两支参赛队各占一张赛台。
参赛队员面向赛台时,赛台左西右东。
3.2.5 场地上物品较多,比赛期间,参赛队和裁判员要共同维护好场地的秩序。
参赛队可以把基地内当前不动或机器人不用的物品放到基地外,只要这个动作不具有任何策略性。
物品也可由赛台旁两名队员之一拿在手里或在盒子里。
如因其它原因而非机器人的动作使模型断裂、失效、移动或被激活,如果可能,裁判员应尽快将它恢复。
3.3 基地场地膜的西南角有一块基地。

机器人创新比赛规则1.比赛介绍机器人创新比赛的形式是学生利用特定的创新平台,围绕大赛设定的同一个的主题,结合各自的创新思路,以团队合作的方式,完成比赛项目。
机器人创新比赛由于每年设置主题不同,非常贴近现实生活,且可以综合利用机器人的机械扩展、电子扩展、传感器扩展及软件控制能力,对于培养学生的创新能力、动手能力、实践能力以及展示学生在机器人方面的综合技术能力有重要的意义。
2.比赛主题:便利生活创新是二十一世纪的主旋律,创新是一个民族的灵魂,创新是人类发展的不竭动力,创新是人类智慧的结晶。
改革开放30多年来,我们的一切发展成就,无不与创新紧紧联系在一起。
创新极大的推动了我国经济社会的发展,改善了我们的生活方式,给人们的日常生活带来了极大的便利。
你有什么好的想法,可以给我们的日常生活带来更多的便利吗?一起来开动脑筋,为建设一个更加便利的社会努力吧!3.参赛要求3.1 参赛对象应为河南省各大高校全日制在校本科、专科院校生;同组的参赛队员不受院系专业、学校限制;每组的参赛队员最多可以包含6名队员,指导老师2名,领队1名。
3.2 所有的参赛队为便于统一安排协调,各参赛单位报名时所留的联系人的联系方式(电话、邮箱)要确保为一人,且此人能来到比赛现场。
3.3 展示规则:该项比赛展示的过程,每个参赛队展示时间为5分钟,这个过程包括:①、队伍用PPT、海报、视频等形式并伴随队员口述来介绍自主研发的功能、应用等。
②、新技术创新点的展示,不限形式,可以自主、半自主、非自主等,裁判会根据展示技术的选题、实用性、创新性、整体效果、提问环节5个方面做出评分。
以上这两项内容可以分开进行,也可以同时进行,即边介绍边展示,但是必须在5分钟内完成这两项内容。
在这5分钟的展示过程结束后是3分钟的提问环节。
超时介绍将酌情扣5-10分。
所有的参赛队伍必须派一名队员(最好是队长)来跟踪和评估整个比赛。
如果没有人来参加,那么相应的队伍将无法获得此项比赛的分数。
机器人大赛比赛规则一.比赛主题“夺宝奇兵”。
每个人心中都有梦想,梦想对于每个人都是无价之宝,但是真正去实现自己的梦想,必须去靠我们的智慧和勇气去努力拼搏。
过程中纵然会有艰难险阻,会有重重迷雾,只要我们有冷静的头脑,有缜密的分析,有持之以恒的精神,面对挑战的勇气,我们并定会找到属于我们的宝物,实现自己的人生梦想。
让我们用我们制作的机器人去帮助我们夺取宝物,实现我们人生中的科技梦想。
本次比赛的主题为“夺宝奇兵”。
机器人的任务就是经过艰难险阻夺取宝物。
过程中机器人需穿过复杂地形,途中读取条形码,根据提取到的关键信息判定藏有机关的密室,通过寻磁方式找到机关控制器,关闭机关,然后从多个物体中识别出宝物密钥,将密钥推到开关区,最后抵达宝物密室,触发开关,表示成功夺取宝物。
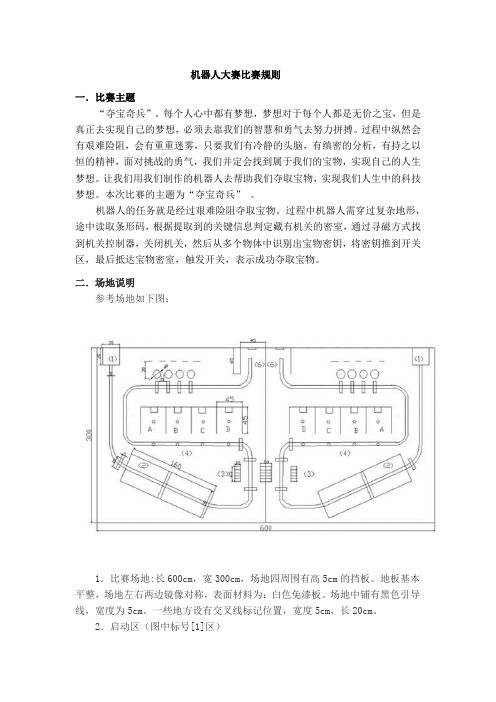
二.场地说明参考场地如下图:1.比赛场地:长600cm,宽300cm,场地四周围有高5cm的挡板。
地板基本平整,场地左右两边镜像对称,表面材料为:白色免漆板。
场地中铺有黑色引导线,宽度为5cm。
一些地方设有交叉线标记位置,宽度5cm,长20cm。
2.启动区(图中标号[1]区)分红、蓝两区,分别由红线和蓝线圈定,双方机器人各占一个启动区,具体颜色由开赛前抽签决定。
机器人需在启动区识别场上开赛声音信号(一定频率的声音信号,持续一段时间后停止,声音开关由裁判长控制),自动开始比赛。
3.跷跷板(图中标号[2]区)面积:160cm×50cm,高度:30cm跷跷板中间有黑色引导线,板两端与地面平滑衔接,在跷跷板前10cm处有交叉线提示位置。
跷跷板中间有交叉线提示位置,交叉线长度同跷跷板宽度。
机器人需在跷跷板上停留一段时间,在20秒内使跷跷板两端同时离开地面的时间尽可能长,期间可多次通过跷跷板,取最长停留时间。
若最长停留时间不足20秒则比赛结束时在总完成时间上累加缺少时间的4倍。
4.解码区(图中标号[3]区)在黑色引导线两侧分别有一段总长度25cm、宽度10cm和总长度25cm、宽度20cm的条形码(后者为两个场地共用),距离引导线10cm。

机器人大赛比赛规则机器人大赛比赛规则一.比赛主题“夺宝奇兵”。
每个人心中都有梦想,梦想对于每个人都是无价之宝,但是真正去实现自己的梦想,必须去靠我们的智慧和勇气去努力拼搏。
过程中纵然会有艰难险阻,会有重重迷雾,只要我们有冷静的头脑,有缜密的分析,有持之以恒的精神,面对挑战的勇气,我们并定会找到属于我们的宝物,实现自己的人生梦想。
让我们用我们制作的机器人去帮助我们夺取宝物,实现我们人生中的科技梦想。
本次比赛的主题为“夺宝奇兵”。
机器人的任务就是经过艰难险阻夺取宝物。
过程中机器人需穿过复杂地形,途中读取条形码,根据提取到的关键信息判定藏有机关的密室,通过寻磁方式找到机关控制器,关闭机关,然后从多个物体中识别出宝物密钥,将密钥推到开关区,最后抵达宝物密室,触发开关,表示成功夺取宝物。
二.场地说明参考场地如下图:1.比赛场地:长600cm,宽300cm,场地四周围有高5cm的挡板。
地板基本平整,场地左右两边镜像对称,表面材料为:白色免漆板。
场地中铺有黑色引导线,宽度为5cm。
一些地方设有交叉线标记位置,宽度5cm,长20cm。
2.启动区(图中标号[1]区)分红、蓝两区,分别由红线和蓝线圈定,双方机器人各占一个启动区,具体颜色由开赛前抽签决定。
机器人需在启动区识别场上开赛声音信号(一定频率的声音信号,持续一段时间后停止,声音开关由裁判长控制),自动开始比赛。
3.跷跷板(图中标号[2]区)面积:160cm×50cm,高度:30cm跷跷板中间有黑色引导线,板两端与地面平滑衔接,在跷跷板前10cm处有交叉线提示位置。
跷跷板中间有交叉线提示位置,交叉线长度同跷跷板宽度。
机器人需在跷跷板上停留一段时间,在20秒内使跷跷板两端同时离开地面的时间尽可能长,期间可多次通过跷跷板,取最长停留时间。
若最长停留时间不足20秒则比赛结束时在总完成时间上累加缺少时间的4倍。
4.解码区(图中标号[3]区)在黑色引导线两侧分别有一段总长度25cm、宽度10cm和总长度25cm、宽度20cm的条形码(后者为两个场地共用),距离引导线10cm。
2012亚太机器人大赛设计方案介绍——机器人机构设计CADzhangliying一、比赛规则说明:1 场地形状——不是中心对称、轴对称。
2 有无对抗性——无对抗性。
3 机器人数量——一个手动机器人,两个自动机器人。
4 行走路线——两种行走路线,需要进行比较分析。
5 本届比赛的难点在哪里?关键点在哪里?①比赛时,左右区域的不固定性,给设计方案制造很多麻烦。
②手动机器人要将代币准确投入到代币箱中,因此对手动机器人的机械手臂的要求比较高。
③公共区域取篮子,可能发生争执。
④采摘机器人需要上台阶,所以设计时需要注意它的移动机构的设计。
需要采用一些特殊的行走机构。
⑤采摘机器人采摘过程中定位要准确,以便于准备投篮。
二、线路选择:1、第一条路线相对于第二条路线来说,行走的路程要短,路程短了,相应地可以节省很多的时间。
但是对采集机器人的要求比较高。
需要机器人自己上台阶并且准确定位。
由于机器人方面的工作,可以在之前的准备阶段得以改进,比赛的时候就可以节省大量的时间,所以本设计方案选择第一条路线。
2、第二条路线行走路线比较长,但是操作起来比较简单,对机器人的要求相对比较小,比赛的时候仅为3分钟,由于时间方面的原因,本设计没有采用第二条线路。
注意:比赛时,本参赛队伍可能在左边的区域运行,也可能在右边的区域运行,自动机器人和采集机器人的程序设定就需要有两种路线的方案,在设计控制方案的时候需要注意到这一点,即左右两个地图都需要进行存储,设定路线,左右转向等。
具体实施按照比赛时所分到的左右区域而定,本设计以右边区域运行为例,来进行设计和分析。
以下将不予以说明,请读者注意。
三、行走路线图中,黄色方块代表手动机器人,对应的行走路线为蓝色部分(往返路线都包括在内);粉色方块代表自动机器人,对应的行走路线为绿色部分;蓝色方块代表采摘机器人,对应的行走路线为红色部分。
具体行走路线的说明以及这三个机器人是如何实现的:手动机器人:操作员要搭乘在手动机器人上,开始启动手动机器人,行走到代币所在的位置,然后启动机器人的机械手臂,用机械手臂夹取代币。
附件12012亚太大学生机器人国内选拔赛规则1.每个队伍允许使用:一个手动机器人、一个自动机器人和一个收集机器人。
2.比赛场地和物体2.1 比赛场地尺寸为 13000mm*13000mm ,被高100mm厚度为50mm 的木头栅栏所包围。
木头栅栏用螺钉固定。
场地被高 100m m厚 50mm 的母头栅栏平均分成两半,分别给红、蓝两队(图表 1-4 )。
2.2 场地包括一个自动机器人区域、手动机器人区域、起始位置、重置位置、装载地、公共区域和投放台。
场地的标识符例如 A C M L1 L2 L3 S1 S2 不必标识在真实的场地上。
2.3 启动位置2.3.1 手动机器人必须从手动机器人启动位置( M) 开始。
2.3.2 收集机器人放在收集机器人启动位置(C), 收集机器人会被手动机器人带走(装载)。
2.3.3 自动机器人必须从自动机器人启动位置( A) 开始(图表 1)2.4 公共区域2.4.1 公共区域是颜色为黄色,高 100mm 的矩形,长为1985mm,宽为 500mm 的区域。
两个深度为 12mm 直径为 452mm的槽口放置在公共区域的表面。
比赛开始前两个槽口分别放上一个篮筐。
每个队伍只能在公共区域取一个篮筐。
(图表2 、13 )3. 比赛步骤和任务3.1 在比赛开始之前,手动机器人的操作者骑上手动机器人。
3.2 手动机器人操作者驾驶手动机器人从始发区到存放幸运币地点。
3.3 手动机器人拿起幸运币并携带它。
3.4 手动机器人的操作者驾驶手动机器人到达隧道处。
3.5 到达隧道处,手动机器人将幸运币插入幸运币盒子。
手动机器人的任何部分不允许接触幸运币盒子。
第一次穿过隧道时在没有将幸运币投放到盒子中之前,手动机器人不允许开始前进穿过隧道。
3.6 当幸运币被完全放入盒子时,裁判给以开始信号,自动机器人才可以自动启动,也可以由操作者按下开始按键。
自动机器人可以抓起存放在公共区的篮筐将其放在手动区的任何位置。
机器人大赛规则解释l RoboCup足球机器人仿真组(2D、3D)仿真组比赛类似FIFA系列足球游戏,比赛由程序自主控制,完全模拟真人比赛,可设定阵形、战术、体力消耗等一系列参数。
比赛上下半场各5分钟,由电脑裁判进行在线裁定。
三维仿真与二维仿真相比,实现了对空间的模拟实战,使比赛更加激烈,更具观赏性。
l RoboCup足球机器人小型组比赛在5.5m×4m的绿色地毯场地上进行,采用桔黄色的高尔夫球作为比赛用球,每队由5个机器人组成。
机器人的体积不超过180cm2,高度不超过150mm。
机器人拥有控球、击球装置,可以和赛场外的计算机进行无线通信。
比赛规则与一般足球相似,有点球、任意球、门球、犯规、红黄牌等,上下半场各10 分钟。
l RoboCup足球机器人中型组(2:2 4:4)中型组比赛分为每队2个和每队4个机器人两种不同类型,使用橙色的国际足联标准5号用球,上下半场各10分钟。
机器人的尺寸不超过0.5m×0.5m ×0.8m,在比赛过程中完全自主控制。
l RoboCup足球机器人四腿组四腿机器人足球赛统一使用Sony公司生产的“爱宝”(AIBO)机器狗作为比赛专用机器人,比赛在4.2m×2.8m的绿色场地上进行。
比赛双方各有四个机器人上场,上下半场各10分钟,队员之间可以进行无线通讯,但禁止任何形式的远程控制,从而保证每一支球队都是一个独立系统。
l RoboCup足球机器人类人组比赛以各队自己开发的人形机器人作为比赛专用机器人,分为规定动作部分和自由发挥部分。
规定动作包括单腿站立一分钟、行走、踢球、点球比赛等,自由发挥部分,每队有5分钟时间展示机器人的各个动作,由裁判从技术和艺术两方面进行评分。
l RoboCup救援组比赛“灾难营救”是个重要的社会议题,机器人营救项目在模拟的事故现场寻找及营救受害者,分仿真组和机器人组两个组别。
旨在激发研究创意,使得机器人可以取代人力,在恶劣的环境下进行营救工作。