最新五轴焊锡机控制器-手持版说明书V6.
- 格式:doc
- 大小:6.06 MB
- 文档页数:29
五轴往复机用户手册Hc-6X系列往复机用户手册前言■首先祝贺您拥有了一台全球领先的HC-6X系列往复自动喷涂机!■为使您正确使用和保养HC-6X系列往复机,我们为您编制了本手册。
本手册应该视为设备的一部份,其中涉及到设备使用中的安全、操作以及维护方面的重要内容,所以请您务必仔细阅读。
当您的设备转让时,请将本手册和设备一并转让给下一个用户。
■产品的设计、生产状态会随时间的推移不断改进,而用户手册难以随时修订改印。
因此,您在使用过程中如遇有与本书不一致的地方,装备状态应以实际设备为准,其有关使用说明可向当地经销商或我公司咨询。
■本手册中采用了“警告”、“小心”、“注意”等字样对不同的内容进行了提示,分别代表如下:■“警告”——表示应避免的会危及设备或(和)人身安全的事项;■“小心”——表示应避免的会损坏设备机件的事项;■“注意”——表示应使检修方便而必须遵守的事项。
■感谢您选购使用设备,欢迎您提出宝贵的意见或建议。
■若您有意见为公司所采用,我公司给给出现金奖励或是购机优惠。
■同时也欢迎您向周围的朋友及同行推荐本机,对于推荐成功的,我们提供两个百分点的提成。
■因为设备是运动中的机械,所以您在使用及维修时必须作好防全防护及自我保护,我们对于此设备所造成的任何安全问题不承担任何责任。
■因为设备元件老化及设计寿命的问题,设备会有不定期的故障发生,我们承诺在不断更新与改进我们设备的同时,也希望您做好保养与维护,以减小此类现像的发生。
■对于本设备故障所造成的生产延误的损失,我司不承担任何连带与附加责任。
■设备在出厂时设定了四百个小时的试用时间限制,请您在付完全部款项后致电我司索取授权码。
(索取授权码时需提供机器编号)■若对于以上有异义,请您在收到设备后十五天内与本公司协商退货事宜。
目录一、概述……………………………………………………………二、设备的主要技术规格…………………………………………2-1使用电源要求2-2使用气源要求2-3电器组件技术规格2-4程式软件技术规格三、使用前需知……………………………………………………3-1.设备的固定3-2.设备组件的检查3-3.设备的润滑3-4.安全事项四、系统初阶………………………………………………………4-1.座标的规化4-2.数字的输入4-3.密码的输入4-4.系统简介4-5.模式简介五、生产模式………………………………………………………5-1.生产模式--主画面5-2生产模式--配方查看5-3生产模式--寸动操作5-4生产模式--报警查看5-5生产模式--喷枪选择5-6生产模式--系统设置六、编程模式……………………………………………………….6-1编程模式--主画面6-2编程模式--配方查看6-3编程模式--喷枪选择6-4编程模式--喷幅设定6-5编程模式--流程选择6-6编程模式--流程编辑6-7编程模式--流程编辑辅助功能6-8编程模式--R轴设置6-9编程模式--插入与删除七、程式编写……………………………………………………….7-1程式编写--基本功能7-2程式编写--过渡模式模式代码 07-3程式编写--直线往复X模式模式代码 17-4程式编写--直线往复Y模式模式代码 117-5程式编写--直线往复Z模式模式代码 217-6程式编写--平面匀速X模式模式代码 27-7程式编写--平面匀速Y模式模式代码 127-8程式编写--侧面匀速X模式模式代码 37-9程式编写--侧面匀速Y模式模式代码 137-10程式编写--平面寸动X模式模式代码 47-11程式编写--平面寸动Y模式模式代码 147-12程式编写--侧面寸动X模式模式代码 57-13程式编写--侧面寸动Y模式模式代码 157-14程式编写--斜面匀速X模式模式代码 67-15程式编写--斜面匀速Y模式模式代码 167-16程式编写--点喷模式模式代码 77-17程式编写--待机模式模式代码 87-18程式编写--立面匀速ZX模式模式代码 97-19程式编写--立面匀速ZY模式模式代码 197-20程式编写--编程技巧八、高级设置与R轴设置一览………………………………………….九、常见故障处理………………………………………………………9-1伺服驱动器:9-2公转变频器:十、常见问题……………………………………………………………十一、保养与维护………………………………………………………十二、新增功能…………………………………………………………十三、随机电路图………………………………………………………一、概述■本手册适用机型■HC-6X系列往复机是我公司与美国GICOK公司合作开发的机型,采用了先进的设计和制造技术。

| ROMI DCM 620-5X | ROMI DCM 620-5FINNOVACIÓNMecanizado y Fabricación aditiva en un solo equipoCOMPENSACIÓNTÉRMICAA través de los sensores instalados en lugares estratégicos del equipo, algoritmos matemáticos hacen la corrección de la posición de los ejes en tiempo real. De esta forma se obtienen resultados dimensionales estables, durante largos periodos de trabajo.ŸCNC Siemens 840D sl con pantallacolorida 19" (ROMI DCM 620-5X)ŸCNC Siemens 828D con pantallacolorida 15.6" (ROMI DCM 620-5F)ŸCobertura completa contra virutas ysalpicaduras ŸCompensación térmicaŸDocumentación completa del producto ROMIŸDos ejes rotatorios con encoder directo(B y C) (ROMI DCM 620-5X)ŸGuía linear de rodillos en los ejes X, Y, Z Notas:(A) Seleccionar obligatoriamente (B) Venta obligatoria del opcional "Cierre de la zona de mecanizado"(C) Se recomienda la venta del accesorio "Sistema de extrator de niebla".(D) Venta obligatoria del accessorio "Sistema para medición/inspección de piezas"ŸInstalación eléctrica disponible para la siguiente tensión/frecuencias: 380VCA / 50-60Hz ŸJuego de llaves principales para operación de la máquina ŸJuego de tornillos y tuercas de nivelación ŸJunta rotativa para refrigeración interna ŸEquipo de iluminación fluorescente selado ŸCojinete para apoyo de la mesa ŸPanel de operación auxiliar manual(handwheel), con funciones de manivela y JOG para ejes ŸPainel elétrico com climatização centrífuga e pressão positiva ŸPistola de lavado (Wash gun)ŸPuerta principal con traba eléctrica de seguridad ŸSistema de lubricación centralizada ŸSistema de resfriamento do cabeçote ŸSistema de refrigeración de corte con bomba de 5bar y tanque (capacidad de 240 litros) ŸSistemas hidráulico y neumático completos ŸSistema neumático para limpieza del cone del husillo ŸSistema de lavado del área de trabajo ŸSistema de limpieza de la base ŸSistema hidráulico para extracción de la herramienta ŸCambiador de herramientas con brazo automático (ATC), con capacidad para 30 herramientas (BT/BBT 40) ŸPintura estándar: Esmalte Epoxy Texturizado Azul Munsell 10B-3/4 e Tinta Epoxy Texturizada Gris Claro RAL 7035ŸTransportador de virutas longitudinalde cinta articulada metálica (TCE) (A)ŸTransportador de virutas longitudinal de cinta de arrastre (TCA) (A)ŸAire acondicionado para armario eléctrico ŸAutotransformador para red 200 hasta 250VAC / 50-60Hz o red 360 hasta 480VAC / 50-60Hz ŸBomba de alta presión para refrigeración por el centro del husillo7, 20 o 70 bar (B)ŸApagado automático de la máquina luego del fin del turno (auto power off) ŸEsfera de Calibración (D)ŸCierre de la zona de mecanizado (C) ŸInterfaz para diagnóstico remoto por cable ŸPintura especial ŸSeparador de aceite / refrigerante (Oil skimmer)ŸSistema de extractor de niebla (B)ŸSistema para medición / inspección de piezas con palpador RMP60ŸSistema para seteado de herramientas con láser Renishaw NC4ŸSistema de limpieza neumática durante el mecanizado ŸTransductor linear de posición (regla optica) eje X/Y/Z ŸJuego adicional de manuales del producto ROMI ŸEncoder para ejes giratorios B y C (ROMI DCM 620-5F) ŸColumna luminosa indicadora de operación (3 colores)Detalle de la Ranura ‘'T''18 H7+0,020 18 H12(Ranura Central) (Otras Ranuras)1,5 x 45° (2x)16+230+201 2 1。
焊狮数字手持焊机使用说明
1、焊接前准备:电焊机应放在通风、干燥处,放置平稳。
2、检查焊接面罩应无漏光、破损。
焊接人员和辅助人员应穿戴好规定的劳保防护用品,并设置挡光屏隔离焊件发出的辐射热。
3、电焊机、焊钳、电源线以及各接头部位要联结可靠,绝缘良好,不允许接线处发生过热现象,电源接线端头不得外露,应用绝缘胶布包扎好。
4、电焊机与焊钳间导线长度不得超过30M,如特殊需要时,也不得超过50M长。
导线有受潮、断股现象应立即更换。
5、交流电焊机:
初、次级线路接线,应准确无误。
输入电压应符合设备规定,严禁接触初线路带电部分。
2次级抽头联结铜板必须压紧,接线柱应有垫圈。
6、直流电焊机使用前,应擦净换向器上污物,保持换向器与电刷接触良好。
全自动焊锡机控制系统用户手册版权说明本手册未经本公司书面许可,任何人或组织不得翻印、翻译和抄袭。
本手册中的信息资料仅供参考。
由于改进设计和功能等原因,本公司保留对本资料的最终解释权,内容如有更改,恕不另行通知。
调试设备要注意安全!用户必须在设备中设计有效的安全保护装置,否则所造成的损失,本公司没有义务或责任负责。
目录系统概述 (3)一.欢迎界面 (3)二.主界面 (3)三.手动操作 (8)四.I/O调测 (9)五.参数设置 (10)5.1速度设置 (11)5.2限位设置 (12)5.3零点设置 (13)5.4其它设置 (13)5.5当量设置 (15)5.6密码设置 (15)5.7复位设置 (16)5.8工艺设置 (17)六.档案管理 (18)七.档案编程 (21)7.1空移 (23)7.2点焊 (23)7.3侧焊 (25)7.4焊接起点 (26)7.5拖焊 (27)7.6等待输入 (28)7.7输出 (28)7.8暂停 (29)7.7延时 (30)7.8旋转定位 (31)7.9循环 (32)7.10条件跳转 (34)7.11输出等待 (35)7.13矩阵 (36)7.14档案调用 (37)7.15程序结束 (37)八.报警 (38)九.调机指引 (42)步骤 (42)系统概述本系统适用于各类焊锡机,具有自动送锡功能,可扩展至双工位。
一.欢迎界面见图1.1。
触摸该界面可以进入主界面。
图1.1二.主界面进入到系统主界面,见图2.1。
主界面用于自动加工时的界面显示以及待机模式下档案操作和设备调试。
图2.11,格式为:当前档案号/总档案数,当前档案号表示正在执行的档案,总档案数表示系统中存在的总档案个数。
当前档案号可以直接输入选择档案。
2,档案名称对应当前档案号,选择当前档案号后,档案名称将自动更新显示。
3,格式为:当前步序/总步序数,当前步序为当前档案正在执行或将要执行的步序,总步序数为当前档案总的步序数。
FIDIA五轴加工中心基础操作目录一、机床概述二、操作面板三、CNC的编程第一章机床概述名称:五轴高速数控铣床型号:Y2K411厂家:fidiaS.P.A主要技术参数:主轴转速:24000rpm主轴功率:27KWX2数控系统:FIDIAC20工件台面尺寸:5000×2200MM工作台最大载重:20000KG实际加工尺寸:X轴4200mm、Y轴110mm、Z轴1000mm A轴(主机床)95°~-110°(附机床)-95°~110°C轴±180°第二章操作面板一、启动和关闭1、启动:打开主机电源后进入windows见面,点击“开始”选择“程序”再选择FidiaUtility文件,然后点击Userinterface进入用户界面。
2、关闭:从File菜单上选择关闭Exit,关闭CNC的命令页面(其它相关的系统界面先关闭,主界面才会关闭)。
最后关闭电脑再关闭总电源。
二、应用窗口界面在CNC命令界面被执行后,在显示器上显示出一个窗口,它占有了整个桌面,其组成如下:A菜单条B显示和工作区域陈列,取决于上下文,位置值,对话窗口,图,目录以及使用者输入值或其它数据的参数或命令窗口C一个按时间顺序显示CNC信息的盒子D垂向软件键条E横向软件键条F日期和时刻1、横向软件键条:RES T·RESTCNC:机床恢复ZERO·RQ:各轴自动顺序回机床零点(Z、A、C、Y、X)·X、Y、Z、A、C:单独轴选择回零点SETCOMMAND:设置命令屏幕显示:F进给S转速UNIT公/英制单位RCTP(五轴连动)OF/ONTOOLCOORD刀具坐标轴OF/ONROTO当前原点坐标的旋转角度SETCOMMAND·SETORIGIN:设置加工原点坐标(1-10个)机床的原点为零号坐标系,是不能更改的。
·SAVEORIGIN:记录坐标数据·RSETORIGIN:恢复坐标数据·CQAHADWH:手轮调节偏移量OF/ONSAVERESTORE:SAVE记录·TOOLTABLE刀具表RESTORE恢复·TOOLTABLE刀具表2、竖向软件键条:CNC环境·PARCNC(参数)·SWITCH使能/禁止阅读被编程的功能·AXIS各轴开关·FSC各轴镜像·MDCNC选择零件程序的执行模式·CQA各轴偏移量·ROTANG·ROTANG以坐标系旋转·ROTCEN以中心旋转·PROGLIM程序限位·AXISLIM轴限位·SAFETYLIM安全限位·TOOLTABLE:刀具表(0号为当前主轴无刀,1-41号为可自动/手动换刀,42号为测头专用刀位,43-100号为自定义刀号)Type1–圆柱平刀具Type2–圆柱圆角刀具Type3–球状刀具Type4–球状刀具,带一个圆周嵌入件Type5–圆柱圆角刀具,带两个圆周嵌入件Type6–圆柱圆角刀具,带两个方嵌入件Type7–锥状刀具,带平刀尖Type8–锥状刀具,带圆角刀尖Type9–镗刀Type10–带刀尖的刀具类型1圆柱体刀具类型2复合型刀具类型3球头刀具类型4带一个嵌入件的球头刀具类型5带两个圆形嵌入件的复合型刀具类型6带方形嵌入件的复合型刀具类型7带平端头的锥体刀具类型8带复合型端头的锥体刀具CNC环境·EXECUTE执行窗口·EXECUTEFILE执行一个零件程序。
五轴智能焊锡机控制系统QZ-SMC1305(手持盒版)V7说明书深圳市瑞德鑫自动化有限公司目录1.产品介绍 (2)1.1产品概述 (2)1.2功能简介 (3)1.3功能特性 (3)1.4产品列表 (4)2.接线说明图 (5)2.1 控制系统按线示意图 (5)2.2 安装尺寸.......................................................................................................... .. (6)3.按键说明 (7)3.1手持盒按键图 (7)3.2手持盒按键说明 (8)4.手持盒操作说明 (10)4.1开机画面介绍 (10)4.2主菜单功能介绍 (12)4.3新增功能操作 (16)4.4删除指令操作 (19)4.5复制指令操作 (19)4.6阵列复制操作 (19)4.7偏移操作 (20)4.8批量修改 (20)4.9类型批量修改 (20)4.10插入指令 (21)4.11系统 (21)4.12执行方式操作 (22)4.13复位方式操作 (23)4.14产量设定 (23)4.15默认参数 (24)4.16停机位置 (25)4.17焊接工艺 (25)4.18清洗功能 (25)4.19空移速度 (26)4.20对位操作 (26)4.21MARK点对位操作 (26)5.注意事项 (27)5.1装机事项 (27)5.2常见问题说明与故障排除 (37)1.产品介绍1.1产品概述QZ-SMC1305是由本公司专业数控团队为焊锡机行业量身定做的低成本、高浓缩、高集成度的智能焊锡机控制系统。
完善的焊锡工艺设置,满足不同的加工需求,广泛应用在多轴全自动焬锡机领域。
1.2功能简介1、显示屏采用320*240高分辨率彩屏、全中文操作界面,易学易用。
2、完善的焊锡工艺设置,具有点焊与拖焊等焊接;供锡速度可根据工作速度自动调整。
F I D I A五轴简易说明书(总13页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除FIDIA五轴加工中心基础操作目录一、机床概述二、操作面板三、CNC 的编程第一章机床概述名称:五轴高速数控铣床型号:Y2K411厂家:fidia 主要技术参数:主轴转速:24000rpm主轴功率:27KWX2数控系统:FIDIA C20工件台面尺寸:5000×2200MM工作台最大载重:20000KG实际加工尺寸:X轴4200mm、Y轴110mm、Z轴1000mmA轴(主机床)95°~-110° (附机床)-95°~110° C轴±180°第二章操作面板一、启动和关闭1、启动:打开主机电源后进入windows见面,点击“开始”选择“程序”再选择Fidia Utility文件,然后点击User interface 进入用户界面。
2、关闭:从File菜单上选择关闭Exit,关闭CNC的命令页面(其它相关的系统界面先关闭,主界面才会关闭)。
最后关闭电脑再关闭总电源。
二、应用窗口界面在 CNC 命令界面被执行后, 在显示器上显示出一个窗口,它占有了整个桌面,其组成如下:A 菜单条B 显示和工作区域陈列, 取决于上下文, 位置值, 对话窗口, 图, 目录以及使用者输入值或其它数据的参数或命令窗口C 一个按时间顺序显示 CNC 信息的盒子D 垂向软件键条E 横向软件键条F 日期和时刻1、横向软件键条:REST·RESTCNC:机床恢复ZERO·RQ:各轴自动顺序回机床零点(Z、A、C、Y、X)·X、Y、Z、A、C:单独轴选择回零点SET COMMAND:设置命令屏幕显示:F进给 S转速 UNIT公/英制单位RCTP(五轴连动)OF/ONTOOL COORD刀具坐标轴OF/ONROTO当前原点坐标的旋转角度SET COMMAND·SET ORIGIN:设置加工原点坐标(1-10个)机床的原点为零号坐标系,是不能更改的。
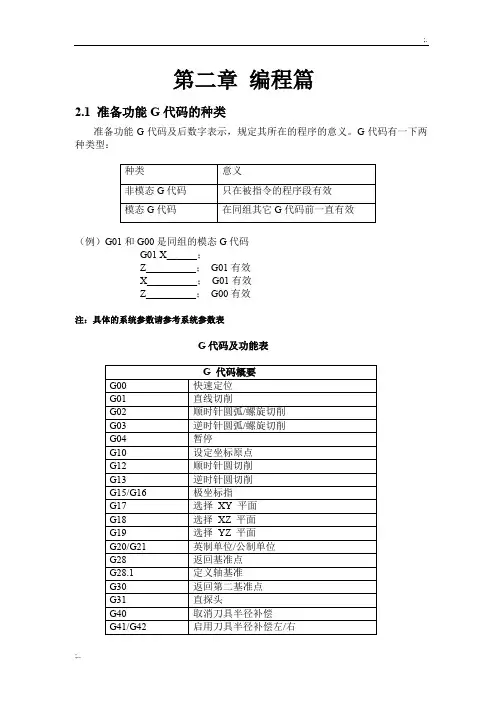
第二章编程篇2.1 准备功能G代码的种类准备功能G代码及后数字表示,规定其所在的程序的意义。
G代码有一下两种类型:(例)G01和G00是同组的模态G代码G01 X______;Z__________;G01有效X__________;G01有效Z__________;G00有效注:具体的系统参数请参考系统参数表G代码及功能表U、V、W分别和A、B、C 同义,同时使用A 和U 或B 和V 等会产生错误(也就是一行中用了两次A)。
在U、V、W 代码的描述中没有指定它们在同一程序行使用的次数,但A、B、C 代码的描述决定了他们只能使用一次。
2.1.1快速直线移动- G00(1)对于快速直线移动,程序G00 X__ Y__ Z__ A__ C__ 中的所有功能字,除了至少选用其中的一个外其它都为可选,如果当前移动模式为G00那么G00也是可选的,刀具可以以协调线性移动的方式以最大进给到达目的点,执行G00命令不会有切削动作发生。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。
执行G16 时的当前点坐标就是极坐标原点。
如果在程序中省略了所有的轴功能字将会产生错误。
如果启用了刀具半径补偿,刀具的移动将与上面所描述的不同(见刀具补偿)。
如果程序在同一行有G53 命令,刀具的移动也同与上述不同(见绝对坐标系)。
2.1.2 以进给直线切削– G01(1)对于以进给直线切削来说,程序G01 X__ Y__ Z__ A__ C__中的所有功能字,除了必须至少使用的之外其它的轴功能字都为可选。
如果当前移动模式为G01,那么G01也是可选的,刀具将以协调线形移动的方式以当前进给移动到目的地。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。

全自动焊机使用说明书DMCS全自动多轴控制系统(复杂5轴5联动/复杂4轴4联动焊接专用)用户手册感谢您选择本公司的产品!本手册对DMCS全自动焊接控制系统的使用做了详细的介绍,包括系统特性、部件操作、编程及加工说明等。
在使用本控制系统及相关的设备之前,请您详细阅读本手册。
这将有助于您更好地使用它。
由于软件的不断更新,您所收到的产品在某些方面可能与本手册的陈述有所出入。
在此谨表歉意。
目录1. 概述DMCS 系列连续轨迹运动控制器是针对需要高速高精度连续轨迹运动场合自主开发的一类经济型运动控制器。
该卡采用高性能DSP 和FPGA 技术,可实现5轴联动或5轴的连续轨迹插补运动,通过路径示教的方式编辑程序文件,下载到控制卡后,控制卡可自动执行程序文件,完成工件加工。
可应用在对精度及速度有较高要求的轮廓控制设备上,如焊接机、点胶机、雕刻机、雕铣机、切割机、裁剪机、数控机床等。
1.1.控制卡规格. 教导手柄规格通讯方式自供电RS232 总线,DB9 公头接口环境要求工作温度:0~60oC,相对湿度:5~90%无凝结. 屏幕显示说明如下图示:开机画面加工参数界面标题栏用于标识该屏幕的主要内容。
在后续表述中,使用标题栏上的文字代表该界面信息,如加工参数界面即对应加工参数屏幕。
按钮用于对应键盘上的按钮。
如“〈F1〉保存参数”表示在《加工参数》下按示教盒面板上的〈F1〉键即可保存参数。
当下文提示按键“〈切换〉+〈××〉”键时,如“〈切换〉+〈8〉”则表示先按下〈切换〉键,然后按〈8〉键,使用〈8〉键的第二功能。
输入框用于输入数字或字符。
如果该参数带有单位,则输入框后紧跟该参数的单位。
. 组合快捷键一览表2示教基础知识DMP 示教盒的主要功能在于通过示教的方式,学习用户需要的运动轨迹,并调节各种控制参数,形成程序文件后下载到运动控制卡,然后控制运动控制卡按程序文件运动,达到加工产品的目的。
. 功能层次图示教编程又称教导编程,指设备在操作人员的操作下完成一系列的动作,而设备则在此过程中记录了所有的动作,并形成可独自重复执行的程序文件。
五轴智能焊锡平台控制系统示教盒版使用说明书目录1.产品介绍 (3)1.1产品概述 (3)1.2功能简介 (3)1.3产品列表 (3)1.4外观尺寸 (4)2.示教盒说明 (5)2.1示教盒按键图 (5)2.2示教盒按键介绍 (5)3.示教盒操作说明 (7)3.1开机画面介绍 (7)3.2主菜单功能介绍 (8)4.其他指令说明 (12)4.1删除指令操作 (12)4.2复制指令操作 (12)4.3阵列复制操作 (13)4.4偏移操作 (13)4.5单点调整 (14)4.6插入指令 (14)4.7复位指令 (14)5.注意事项 (15)5.1装机事项 (15)5.2常见问题说明与故障排除 (16)1.产品介绍1.1产品概述本产品是由本公司为焊锡机行业量身定做的高精准、易操作、高集成度的智能焊锡平台控制系统。
完善的焊接工艺设置,满足不同的加工需求,广泛应用在多轴全自动焬锡机领域。
1.2功能简介1、显示屏采用320*240高分辨率彩屏、全中文操作界面,易学易用。
2、完善的焊锡工艺设置,具有点焊与拖焊等焊接;供锡速度可根据工作速度自动调整。
3、点位参数可以用示教盒编程,具有简单易学、操作便捷等特点。
3、具有区域阵列复制,平移运算,批量编辑,单步、全自动及循环运行,I/O输入输出等功能。
4、具有自动执行功能、自动复位、产量计算、加工时间计时器等功能,满足不同应用需求。
5、动作参数编辑完毕,通过串口将动作参数下载到控制器中,即可脱机、独立运行;也可将动作参数保存到示教盒的SD卡中,方便调用;并能进行设备间的参数拷贝及保存。
6、示教盒配备2G的SD卡,可存储数千个加工文件,每个文件可支持8000条指令,使用时调出来即可。
7、硬件上具备4个枪通道控制、4路通用输出、8路输入、12路高速脉冲输出。
1.3产品列表1.4 外部尺寸2.示教盒说明2.1示教按键图2.2示教盒按键说明3.示教盒操作说明3.1 开机画面介绍上电后示教盒自动跳转自开机画面-当前工作画面,如下图所示:加工文件:指加工文件名;工作状态:指机器的当前工作状态;分为“停机、暂停、运行”三种状态;加工数量:指机器运行已完成的产量;工作速度:指设备运行过程的速度。
JDPaint V5.5 多轴加工方法(版本0.01)北京精雕科技有限公司2007.08前言本文档从多轴基本知识、控制系统及控制软件(EN3D)设定及加工、JDPAINT5.5五轴编程模块等方面介绍一些常用的多轴加工技术,用以帮助使用者了解多轴加工操作和设定,减少多轴路径编程时间,改善多轴刀具路径质量。
本文档主要以实例的方式来介绍多轴编程加工,在阅读时可以结合实例来学习,可以达到更好的效果。
不同的人有不同的思路,因此请不要把本文档中介绍的一些技术视为多轴加工的基本原理,多轴加工技术内容相当丰富,不是薄薄一本手册可以覆盖的。
同时需要进行大量的实际加工,从中体会多轴加工的不同之处,灵活运用我们现有的编程功能,才能对五轴加工有一定的领悟。
阅读文档的读者应具备以下几方面的背景知识:1、对三轴精雕机有一定了解;2、具备一些模型的三轴加工经验;3、具备一些三维建模(或者曲面造型)经验者更佳。
第一章绪论在过去模具加工很少使用五轴加工,问题在于多轴机床的价格昂贵及人员培训与技术上的困难,大家皆敬而远之。
近年来因模具交期紧迫及价格压缩,五轴机床标准化产量,价格逐年下降,使五轴加工渐渐的受到模具业重视,多轴机床将是继高速加工机后另一个有效的加工工具。
1.1 五轴加工与三轴加工比较五轴加工与三轴加工比较,有以下几方面的优点:1) 减少工件非加工时间,可以提高加工效率五轴加工的一个主要优点是仅需经过一次装夹即可完成复杂形状零件的加工。
和多次装夹相比,它可极大地提高加工和生产能力,显著缩短产品加工周期及加工成本,并且提高了加工精度。
2) 刀具可以摆到更好的位置来加工曲面五轴加工完成一些三轴加工无法完成的加工,比如有负角的曲面零件加工,刀具可以摆到更好的位置来加工曲面,如图1-1所示。
图1-1 刀具可以摆到更好的位置来加工曲面图1-2 缩短加工时间, 改善表面加工质量3) 可以缩短曲面加工时间,改善曲面表面的加工质量五轴加工可通过将刀具倾斜一定角度,例如用铣刀侧刃进行铣削等,缩短加工时间;另外路径间距相同的情况下,用五轴加工工件表面的残留量要比三轴加工小得多,有利于改善加工曲面的表面光洁度,如图1-2所示。
1 绪论1.1 工业机器人简介]1[早在20世纪初,随着机床、汽车等制造业的发展就出现了机械手。
1913年美国福特汽车工业公司安装了第一条汽车零件加工自动线,为了解决自动线、自动机的上下料与工件的传送,采用了专用机械手代替人工上下料及传送工件。
可见专用机械手就是作为自动机、自动线的附属装置出现的。
“工业机器人”这种自动化装置出现的比较晚。
但是自从世界上第一台工业机器人问世之后,不同功能的机器人也相继出现并且活跃在不同的领域,从天上到地下,从工业拓广到农业、林、牧、渔,甚至进入寻常百姓家。
机器人的种类之多,应用之广,影响之深,是我们始料未及的。
本课题所指的工业机器人,或称机器人操作臂、机器人臂、机械手等。
从外形来看,它和人的手臂相似,是由一系列刚性连杆通过一系列柔性关节交替连接而成的开式链。
这些连杆就像人的骨架,分别类似于胸,上臂和下臂,工业机器人的关节相当于人的肩关节、肘关节和腕关节。
操作臂的前端装有末端执行器或相应的工具,也常称为手或手爪。
手爪是由两个或多个手指所组成,手指可以“开”与“合”,实现抓去动作和细微操作。
手臂的动作幅度一般较大,通常实现宏观操作。
工业机器人由主体、驱动系统和控制系统三个基本部分组成。
主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。
大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;圆柱坐标型工业机器人示意图控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
由于工业机器人具有一定的通用性和适应性,能适应多品种中、小批量的生产,70年代起,常与数字控制机床结合在一起,成为柔性制造单元或柔性制造系统的组成部分。
在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作。
自动焊锡使用手册操作前请仔细阅读本操作手册(以免因操作失误给机器与个人带来的损害)瑞安市鼎昆自动化科技有限公司目录第一章概述 (6)1.1 硬件 (6)1.2 软件 (7)第二章主界面及按键说明 (8)2.1 主界面说明 (8)2.2 手持编程器按键说明 (9)2.3 程序选择及对针按键说明 (12)第三章编程的基本方法说明 (12)3.1 单位符号解释 (12)3.2 焊锡加工程序结束的约定 (13)3.3 焊锡程序运行方式 (13)第四章菜单 1 (13)4.1 第1 页1.文件名编辑 (14)4.2 第1 页2.生成默认焊锡参数 (14)4.3 第1 页3.编辑多个编程点 (14)4.4 第1 页4.设置标号 (15)4.5 第1 页5.阵列焊锡 (16)4.6 第1 页6.阵列展开操作 (16)4.7 第1 页7.调用子程序 (16)4.9 第1 页9.程序跳转 (16)4.10 第2 页1.有限次数循环 (17)4.11 第2 页2.程序结束或返回 (17)4.12 第2 页3.延时 (17)4.13 第2 页4.暂停 (17)4.14 第2 页5.输入信号编程 (17)4.15 第2 页6.输出信号编程 (17)4.16 第3 页1.工件计数器 (18)4.17 第3 页2.回空闲停留位置 (18)4.18 第3 页3.回原点 (18)第五章菜单2........................................................................................................................ (18)5.1 第1 页1.手动校准参考点设置 (19)5.2 第1 页2.校准对针点 (19)5.3 第1 页3.Z轴下移限制值设置 (19)5.4 第1 页4.空闲停留点坐标设置 (19)5.5 第1 页5.完成提起高度设置 (19)5.6 第1 页6.空移速度设置 (20)5.7 第1 页7.送锡与退锡参数设置 (20)5.8 第1 页8.拖焊速度设置 (20)5.9 第1 页9. 接触焊点动作设置 (20)5.10 第2 页1.烙铁头清洗动作设置 (21)5.11 第2 页2.烙铁头清理位置设置 (21)5.12 第2 页3.烙铁温度设置 (21)5.13 第2 页4.急停时输出信号设置 (21)5.14 第2 页5. 输出信号初始化设置 (22)5.15 第2 页6.匀速调试速度设置 (22)5.16 第2 页7.工件计数器设置 (22)第六章菜单3 (23)6.1 第1 页1.针头移动到指定坐标 (23)6.2 第1 页2.焊锡文件复制 (23)6.3 第1 页3.DXF文件转换 (24)6.4 第1 页4.对当前文件锁定/解锁 (24)6.5 第1 页5.对机器高级锁定/解锁 (24)6.6 第1 页6.当前文件锁定密码设置 (24)6.7 第1 页7.机器高级锁定密码设置 (24)6.8 第1 页8.输入口名称编程 (24)6.9 第1 页9.输出口名称编程 (25)6.10 第2 页1.按键声音设置 (25)6.11 第2 页2.速度优先等级设置 (25)6.12 第2 页3.小键盘锁定/解锁 (25)6.13 第2 页4.浏览文件名 (25)6.14 第2 页5.设备信息 (25)6.15 第2 页6.程序版本信息 (25)6.16 第2 页7.更新应用程序 (25)6.17 第2 页8.更新驱动程序 (26)6.18 第2 页9.更新DSP程序 (26)6.19 第3 页1.查看输入信号状态 (26)瑞安市鼎昆自动化科技有限公司△!警告◆本机器所使用的电源电压220V,50~60Hz ,触摸电源会产生致命事故◆本机器应放置在室内使用。
五轴智能焊锡机控制系统QZ-SMC1305(手持盒版)V6.6说明书琼宇电子科技目录1.产品介绍 (2)1.1产品概述 (2)1.2功能简介 (3)1.3功能特性 (3)1.4产品列表 (4)2.接线说明图 (5)2.1 控制系统按线示意图 (5)2.2 安装尺寸.......................................................................................................... .. (6)3.按键说明 (7)3.1手持盒按键图 (7)3.2手持盒按键说明 (8)4.手持盒操作说明 (10)4.1开机画面介绍 (10)4.2主菜单功能介绍 (12)4.3新增功能操作 (16)4.4删除指令操作 (19)4.5复制指令操作 (19)4.6阵列复制操作 (19)4.7偏移操作 (20)4.8批量修改 (20)4.9类型批量修改 (20)4.10插入指令 (21)4.11系统 (21)4.12执行方式操作 (22)4.13复位方式操作 (23)4.14产量设定 (23)4.15默认参数 (24)4.16停机位置 (25)4.17焊接工艺 (25)4.18清洗功能 (25)4.19空移速度 (26)4.20对位操作 (26)4.21MARK点对位操作 (26)5.注意事项 (27)5.1装机事项 (27)5.2常见问题说明与故障排除 (37)1.产品介绍1.1产品概述QZ-SMC1305是由本公司专业数控团队为焊锡机行业量身定做的低成本、高浓缩、高集成度的智能焊锡机控制系统。
完善的焊锡工艺设置,满足不同的加工需求,广泛应用在多轴全自动焬锡机领域。
1.2功能简介1、显示屏采用320*240高分辨率彩屏、全中文操作界面,易学易用。
2、完善的焊锡工艺设置,具有点焊与拖焊等焊接;供锡速度可根据工作速度自动调整。
3、支持DXF格式文件导入,实现直接导入文件的路径数据,省去繁锁的手工教导,方便准确。
4、支持双MARK点对位功能,用来修正工件因摆放的角度和位置偏差而引起的误差。
5、具有区域阵列复制,平移运算,批量编辑,单步、全自动及循环运行,I/O输入输出等功能。
6、具有自动执行功能、自动复位、产量设定、加工时间计时器等功能,满足不同应用需求。
7、动作参数编辑完毕,通过串口将动作参数下载到控制器中,即可脱机、独立运行;也可将动作参数保存到手持盒的SD卡中,方便调用;并能进行设备间的图形拷贝及保存。
8、手持盒配备2G的SD卡,可存储数千个加工文件,每个文件可支持8000条指令,使用时调出来即可。
9、硬件上具备4个枪通道控制、4路通用输出、8路输入、12路高速脉冲输出。
10、每条动作指令都有独立的出锡时间、回锡时间、上抬高度,灵活的批量修改等功能,能快速提高编辑效率。
1.3功能特性1.3.1控制器硬件特性电机轴数:5轴(XYZRB)脉冲频率:200KIO口数量:8路专用输入(XYZR原点、启动/暂停、暂停、复位/急停按钮),4路专用胶枪输出(4个胶枪开关控制,直接驱动电磁阀,驱动电流2A)。
4路通用I /O输出,4路通用I /O输入,12路高速“NPN集电极开路”5-24VDC输出,额定电流0.5A。
IO输入类型:光耦隔离输入。
存储容量:16M接口方式:DB44接口工作电压:24V DC,工作温度:70℃储存温度:-40℃-70℃工作湿度:40%-80%储存湿度:0%-95%1.3.2 手持盒硬件特性接口方式:配备USB接口和串口,USB口用于连接电脑,此功能暂时保留。
串口用来连接手持盒。
存储方式:配置2G SD卡。
显示配置:分辨率320*240,3.2寸彩色液晶屏。
2.接线说明图2.1 控制系统接线示意图2.2 安装尺寸19.271∅3.按键说明3.1手持盒按键图3.2手持盒按键说明警告 操作本手持盒时,必须在断电的情况下插拔串口线,以免烧坏控制器和手持盒。
连接!4.手持盒操作说明4.1 开机画面介绍上电后手持盒自动跳转自开机画面-当前工作画面,如下图所示:加工文件:指加工文件名;工作状态:指机器的当前工作状态;分为“停机、暂停、运行”三种状态; 工作方式:指机器的运行方式;分为“手动运行、自动循环运行”两种模式;加工数量:指机器运行已完成的产量;当加工数量=设定产量时,表示机器已完成加工数量,并停机; 设定产量:指机器运行预设产量; 工作速度:指设备运行过程的速度,即涂胶的轨迹速度。
此速度为指令编辑时设定速度的百分比,围在0~100%;在此画面下直接按方向键“Y ”键可提高或降低工作速度百分比,按“Z ”键则以10为单位提高或降低工作速度百分比。
但不可实时修改工作速度,修改此速度后,第二次运行才有效。
X :指机器X 轴的当前坐标; Y :指机器Y 轴的当前坐标; Z :指机器Z 轴的当前坐标; F1~F4:为快捷操作。
按“菜单”进入“主菜单”面画。
详见4.2介绍。
按“移动”可直接移动设备;如图所示:按“编辑”进入指令示教对话框(注:1、如手持盒中无文件,按“编辑”则是新建文件,操作方法同新建文件一样。
2、如手持盒中已有文件,按“编辑”则是进入指令列表对话框,可查看及编辑指令。
);1、当控制器中没有文件时,按“编辑”是新建一个文件;系统会自动提示以下对话框:“左功能键”为是,“右功能键”为否;选择后系统会自动弹出文件保存对话框,输入文件名按保存后会进入指令示教编辑对话框(“#”键为数字和字母切换键。
),在此画面示教的指令会自动保存在刚刚输入的文件下。
如图所示:在指令列表对话框下,按数字键1~5可编辑图中对应的图形元素,更多图形选择按数字键6进入。
如下图所示:2、当控制器中有文件时,按“编辑”则是进入指令列表对话框,以便修改及编辑参数等操作。
如图所示:键盘左键“X键”可跳至当前列表的第一条指令,右键“X键”可跳至当前列表的最后一条指令;键盘上键“Y键”可上移当前指令,下键“Y键”可下移当前指令;多选时,Y键为选中指令方向键。
键盘上键“Z键”可翻页至上一页指令列表,下键“Z键”可翻页至下一页指令列表;键盘上键“R键”可放大图形文件,下键“R键”可缩小图形文件;“CLR”键可清除列表中选中的指令;键盘“MOVE”键可直接对选中的指令坐标进行编辑与修改(不自动定位到选中的指令坐标);键盘“#”键则是用于对选中的点进行对针操作,对针编移后此文件所有的指令都作相应偏移。
在此画面下,F3为选择所有指令(即全选),F4为选择某一段指令(即多选),有光标提示。
按“操作”可对选择的指令进行复制指令、阵列复制、偏移操作、批量修改、类型批量修改、插入指令等操作。
1. 复制指令:是指复制选中的指令;2. 阵列复制:是指用于矩阵复制选中的指令;3. 偏移操作:是指偏移选中的动作指令,把坐标偏移指定的数值;4. 批量修改:是指批量修改某项参数,提高编辑效率;5. 类型批量修改:是指对一个文件下的同一指令类型进行批量修改;6. 插入指令:是指在选中的指令前面插入指令;在此画面下,当光标只选中一条指令时,接“参数编辑”进入如下对话框,即可对当前指令进行参数修改,当改变任何一个或几个参数后,会自动弹出“保存”键,保存后则参数修改成功。
如图所示:“预热出锡”:指预先出锡到烙铁头上;“二段送锡”:指第二段的送锡量;(通常拖焊时会用到第二段送锡,点焊时第二段可设为0)。
“三段送锡”:指第三段的送锡量;(通常指速段拖焊时的用锡量,点焊时指点焊的锡量)。
“预热时间”:指烙铁头接触被焊点后延时的时间。
“二段延时”:指第二段出锡之后在当前位置等待的时间。
“三段延时”:指第三段出锡之后在当前位置等待的时间。
“进枪高度”:指斜着进枪时焊枪与焊点之间的工作距离。
“上抬高度”:指焊接完毕后焊枪上抬的高度。
“预热速度”:指预热出锡时的速度。
“二段速度”:指第二段出锡时的速度。
“三段速度”:指第三段出锡时的速度。
当光标选中两条及两条以上的指令时(即多选或全选时),“参数编辑”会变为“批量修改”,可对选中的多条指令进行快速批量修改。
如图所示:4.2 主菜单功能介绍按菜单键进入“主菜单”画面,如下图所示:4.2.1“打开文件”菜单指打开SD 卡里现有的动作文件;按“选择或确认”键即可打开当前选择的文件列表,如下图打开文件所示:选择打开文件时,会提示是否下载程序,“下载”表示将此文件指令下载到控制器中。
如图所示:选择“是”,下载完成后会直接跳至开机画面下;选择“否”,会跳至指令列表对话框下,即显示该文件中的所有指令,如图所示:4.2.2“新建文件”菜单指新建一个动作文件;按“确认键”后提示“是否复位设备”,选择是否复位后会提示文件保存对话框,输入文件名后则进入指令编辑对话框,如下图所示:在此面面下可新增需要的图形指令,按数字键1~5可编辑图中对应的图形元素,更多图形选择按数字键6进入。
操作同4.1介绍。
4.2.3“编辑文件”菜单指对控制器中已打开的文件进行编辑操作,同4.1介绍。
如图所示:4.2.4“另存文件”菜单将已打开的文件另存一个文件,输入文件名后,按“确认”键即文件保存成功;文件名可为数字和英文,“#”键可切换输入法,如下图所示:4.2.5“删除文件”菜单删除已存在的文件名,按“选择”或“确认”键即文件删除成功;如下图所示:选择要删除的文件名,按“选择”或“确认”键即文件删除成功。
4.2.6“下载数据”菜单指下载文件到设备的控制器中;如下图所示:4.2.7“上传数据”菜单指从设备的控制器读取文件到手持盒中;4.2.8“系统”菜单指设备参数;包括:复位速度、最高速度、加速度、拐角加速度、用户密码、开机复位、手动加速度、手动速度、空移顺滑度、X轴脉冲当量、Y轴脉冲当量、Z轴脉冲当量、R轴脉冲当量、B轴脉冲当量、X轴行程、Y轴行程、Z轴行程、R轴行程、B轴行程、设备原点方向设置。
详见4.11介绍4.2.9“选项”菜单指调节机器的工作模式;包括:执行方式、复位方式、产量设定、默认参数、停机位置、清洗功能、空移速度等;详见4.12-4.19介绍。
4.2.10“帮助”菜单指控制器的版本型号,以及检测控制器的IO口状态,恢复默认参数设置。
4.3新增功能操作4.3.1例新增“点”按数字键1直接进行点坐标教导,点的坐标可以通过方向键来移动“左X键”→X轴左移、“右X键”→X 轴右移,“上Y键”→Y轴上移、“下Y键”→Y轴下移,“上Z键”→Z轴上移、“下Z键”→Z轴下移。
“R键”→R 轴角度移动。
按“确认”键新增指令成功。
退出教导,直接按“返回”键,如图所示:4.3.2例新增“直线”按数字键2,先编辑直线的起点坐标,按确认键;再编辑直线的终点坐标,再按确认键,则直线指令编辑完成。