汽车四轮定位参数
- 格式:pptx
- 大小:800.81 KB
- 文档页数:18
四轮定位的标准参数
四轮定位的标准参数包括:
1. 轴距:指车轮前后轴的轴心之间的距离,通常以毫米(mm)为单位。
2. 轴距前后翘:指汽车前后轴距在垂直方向上的差异,通常以毫米(mm)为单位。
3. 后轮距:指汽车后轮中心线之间的距离,通常以毫米(mm)为单位。
4. 翼子板高度:指车轮顶部到翼子板边缘的高度差异,通常以毫米(mm)为单位。
5. 前束角:指车轮前轴与车体中心线的夹角,通常以度数为单位。
6. 后束角:指车轮后轴与车体中心线的夹角,通常以度数为单位。
7. 前轮左右偏差:指前轮中心线与车体纵轴的偏差,通常以毫米(mm)为单位。
8. 后轮左右偏差:指后轮中心线与车体纵轴的偏差,通常以毫米(mm)为单位。
9. 车身倾角:指车身左右倾斜的角度差异,通常以度数为单位。
10. 轮胎对地角度:指轮胎与地面之间的接触角度,通常以度
数为单位。
四轮定位的标准参数
四轮定位是指对车辆的四个车轮进行定位,包括前轮定位和后轮定位。
其标准参数包括以下几个方面:
1. 前轮定位参数:包括前轮垂直偏角、前轮外倾角、前轮前束、主销内倾角和主销外倾角等。
2. 后轮定位参数:包括后轮前束、后轮外倾角、后轮垂直偏角、后轴距等。
3. 车辆参数:包括车辆长度、宽度、高度、轴距、轮距等。
4. 悬挂系统参数:包括悬挂弹簧的硬度、减震器的阻尼、稳定杆的长度等。
5. 车轮参数:包括车轮直径、轮胎宽度、轮胎平整度等。
以上参数都是四轮定位时需要测量的标准参数,通过调整这些参数可以保证车辆行驶的稳定性和安全性。

四轮定位参数对汽车行驶性的影响汽车的四个车轮有严格的定位参数,车辆在出厂之前都要进行四轮定位参数调整,以确保车辆上路后能够正常行驶,不会跑偏。
但在车辆使用过程中,随着悬架或转向系统各个部件的磨损或松动,可能会导致四轮定位参数偏离规范值,从而导致车辆跑偏。
所以四轮定位对于车辆安全行驶是非常重要的。
以下简要介绍一下各个定位参数对车辆行驶性能的影响,供大家参考。
一、前束对汽车的影响前束的作用是为了消除因为车轮外倾会使车轮产生滚动伴随滑动从而引起车轮的磨损。
在一辆前轮驱动的汽车中,前驱动轴的驱动力有使前轮增大前束的趋势,因此汽车制造厂通常在这类车辆的前轮上设定较小的负前束。
在后轮驱动的汽车中,路表面的前轮摩擦使汽车在行驶时车轮趋向负前束的位置,在这类车中制造商通常在前轮上有较小的前束设置。
车辆在停放时将前轮调节为小的前束或负前束。
这样行驶时,车辆将变为平行,转向杆系总是有微小的横向运动。
在行驶时,作用在前轮上的力将趋向于压缩或拉伸转向杆件至于是拉伸还是压缩取决于转向杆系是在前方还是在后方。
不正确的前束调节将导致车轮胎磨损加剧并导致轮胎失效、撞车事故以及人员受伤。
过大的负前束导致胎面凸起的内侧磨损以及外侧形成锐利的羽毛状边缘。
如果出现过大的前束,胎面的磨损状况刚好相反。
磨损的转向杆件会使前束设置不正确及不稳定.如果前悬架弹簧减弱,前悬架高度降低,这时转向摇臂及摇杆随底盘向下移动,这使转向横杆移到一个更加水平的位置并趋向于使梯形臂向外移动从而减少前轮前束。
后轮前束的调整不当时会使推力线离开几何中心线从而导致转向拉力以及胎面磨损。
如果左后轮负前束过大,推力线会移向几何中心线左侧,转向拉力就向右;而当推力线移向几何中心线右侧时,转向拉力则向左。
二、外倾角对汽车的影响外倾的作用是使转向操纵轻便,同时抵消弹性变形可能产生的车轮内倾,还可以在轮毂上产生向内的轴向力从而减轻外轴承和锁紧螺母的负荷。
车辆在高速行驶急转弯时,离心力促使车辆向转向圆外侧移动,在这种情况下车辆较多的重量转移到转向外侧的车轮上,因而弯道外侧的前悬架受压向下移而内侧向上提高。

四轮定位参数总结四轮定位参数是指汽车的几个重要参数,包括前后轮距、前后悬挂高度、前后轮转角、轴距等,这些参数直接影响着汽车的行驶稳定性、舒适性和操控性能。
在汽车制造和维修过程中,正确调整和维护四轮定位参数是非常重要的。
首先,前后轮距是指前后轮中心之间的距离。
前后轮距对于汽车的操控性能和行驶稳定性至关重要。
如果前后轮距不正确,会导致汽车的转向不灵敏,车辆行驶时容易出现漂移的情况。
因此,调整和维护前后轮距是确保汽车操控性能和行驶稳定性的重要步骤。
其次,前后悬挂高度是指汽车前后悬挂系统的高度。
前后悬挂高度直接影响到汽车的行驶平稳性和舒适性。
如果前后悬挂高度不平衡,会导致汽车在行驶过程中出现晃动和不稳定的情况。
因此,正确调整和维护前后悬挂高度对于提高汽车的行驶平稳性和舒适性非常重要。
此外,前后轮转角是指前后轮与车体之间的夹角。
前后轮转角对于汽车的转向灵活性和操控性能起着重要的作用。
如果前后轮转角不正确,会导致汽车的转向不灵活,行驶过程中容易出现打滑的情况。
因此,准确调整和维护前后轮转角可以提高汽车的操控性能和行驶安全性。
最后,轴距是指汽车前后轴之间的距离。
轴距对于汽车的行驶稳定性、转向稳定性和悬挂性能有很大影响。
如果轴距不正确,会导致汽车的行驶稳定性下降,容易出现方向盘抖动和车身晃动的情况。
因此,正确调整和维护轴距是保证汽车行驶稳定性和悬挂性能的重要环节。
综上所述,四轮定位参数对于汽车的行驶稳定性、舒适性和操控性能具有重要影响。
在汽车制造过程中,调整和维护这些参数是非常关键的。
同时,在汽车维修过程中,也应该定期检查和调整四轮定位参数,以确保汽车的行驶安全性和操控性能。
只有保持四轮定位参数的正确性,才能使汽车更好地适应不同的道路条件和提高驾驶者的驾驶舒适性。
因此,四轮定位参数的调整和维护是汽车制造和维修工作中必不可少的一环。
《四轮定位基础知识》
一、主要参数
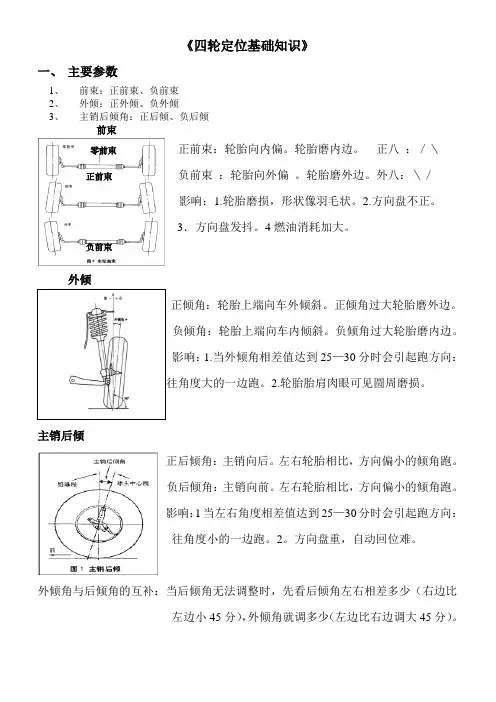
1、前束:正前束、负前束
2、外倾:正外倾、负外倾
3、主销后倾角:正后倾、负后倾
前束
零前束正前束:轮胎向内偏。
轮胎磨内边。
正八:/\
正前束负前束:轮胎向外偏。
轮胎磨外边。
外八:\/
影响:1.轮胎磨损,形状像羽毛状。
2.方向盘不正。
3.方向盘发抖。
4燃油消耗加大。
负前束
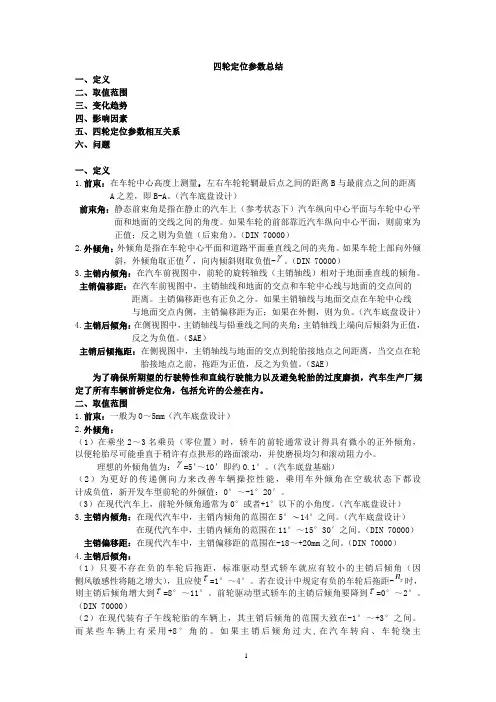
外倾
正倾角:轮胎上端向车外倾斜。
正倾角过大轮胎磨外边。
负倾角:轮胎上端向车内倾斜。
负倾角过大轮胎磨内边。
影响:1.当外倾角相差值达到25—30分时会引起跑方向:
2.轮胎胎肩肉眼可见圆周磨损。
主销后倾
正后倾角:主销向后。
左右轮胎相比,方向偏小的倾角跑。
负后倾角:主销向前。
左右轮胎相比,方向偏小的倾角跑。
影响:1当左右角度相差值达到25—30分时会引起跑方向:
往角度小的一边跑。
2。
方向盘重,自动回位难。
外倾角与后倾角的互补:当后倾角无法调整时,先看后倾角左右相差多少(右边比
左边小45分),外倾角就调多少(左边比右边调大45分)。

丰田考斯特四轮定位参数表【原创实用版】目录1.丰田考斯特四轮定位参数表概述2.四轮定位参数的含义和作用3.丰田考斯特四轮定位参数表中的参数详解4.四轮定位参数调整的影响和注意事项5.结论正文丰田考斯特四轮定位参数表概述丰田考斯特是一款广受欢迎的中巴车,其四轮定位参数表是车辆维修和保养过程中非常重要的参考资料。
四轮定位参数涉及到车辆的操控性能、行驶稳定性以及轮胎的磨损状况,因此对于车主和维修人员来说,了解四轮定位参数表中的各项数据具有很大的实用价值。
四轮定位参数的含义和作用四轮定位参数是指车辆四个车轮在行驶过程中,与车身相对位置的各项几何参数,包括前轮前倾角、后轮前倾角、前轮外倾角、后轮外倾角等。
这些参数对于车辆的行驶性能、稳定性和轮胎磨损状况具有重要影响。
1.前轮前倾角:前轮与车身前缘的夹角,调整前轮前倾角可以改变车辆的操控性能,提高行驶稳定性。
2.后轮前倾角:后轮与车身后缘的夹角,调整后轮前倾角可以改变车辆的操控性能,提高行驶稳定性。
3.前轮外倾角:前轮与车身侧面的夹角,调整前轮外倾角可以改变车辆的操控性能,减少轮胎的磨损。
4.后轮外倾角:后轮与车身侧面的夹角,调整后轮外倾角可以改变车辆的操控性能,减少轮胎的磨损。
丰田考斯特四轮定位参数表中的参数详解丰田考斯特四轮定位参数表包含了前轮前倾角、后轮前倾角、前轮外倾角、后轮外倾角等各项参数,这些参数的具体数值根据不同车型和配置会有所差异。
在实际维修和保养过程中,维修人员需要根据车辆实际状况和车主需求,对这些参数进行调整。
四轮定位参数调整的影响和注意事项调整四轮定位参数会影响车辆的操控性能、行驶稳定性和轮胎磨损状况。
在调整参数时,应注意以下几点:1.调整前轮前倾角和后轮前倾角时,应保持两侧车轮参数一致,以确保车辆行驶稳定性。
2.调整前轮外倾角和后轮外倾角时,应根据轮胎的磨损情况进行,减少轮胎磨损。
3.调整参数时应使用专业设备,如四轮定位仪,以确保调整精度。
四轮定位的参数和定义四轮定位是一种用于确定物体位置的技术,可以广泛应用于无人驾驶、机器人导航、室内定位等领域。
它通过使用四个传感器或定位设备进行测量和计算,来确定物体在三维空间中的位置和姿态。
本文将介绍四轮定位的参数和定义,以及其在实际应用中的意义和局限性。
一、参数定义1. 位置参数:指物体在三维空间中的位置坐标,通常用三个数值表示,如(x, y, z)。
这些数值可以是相对于某个参考点或坐标系的绝对位置,也可以是相对于其他物体的相对位置。
2. 姿态参数:指物体的朝向和角度,通常用三个数值表示,如(roll, pitch, yaw)。
这些数值可以描述物体相对于某个参考方向或坐标系的旋转角度。
3. 精度参数:指四轮定位系统的测量精度,通常用标准差或误差范围表示。
精度越高,表示测量结果与真实值之间的误差越小。
4. 可靠性参数:指四轮定位系统的稳定性和可靠性,通常用故障率或失效概率表示。
可靠性越高,表示系统在长时间使用过程中的故障概率越低。
二、四轮定位的意义和应用1. 无人驾驶:四轮定位是实现无人驾驶的关键技术之一。
通过准确测量车辆的位置和姿态参数,无人驾驶系统可以根据预先设定的路径规划和环境感知,实现自主导航和驾驶。
2. 机器人导航:四轮定位也可以应用于机器人导航领域。
通过测量机器人的位置和姿态,机器人可以根据预先设定的导航算法和地图信息,实现自主导航和路径规划,完成各种任务。
3. 室内定位:四轮定位可以用于室内定位系统,帮助人们在室内环境中准确定位和导航。
通过将四个传感器或定位设备分布在室内,可以实现对人员和物体的准确追踪和定位。
4. 航空航天:四轮定位可以应用于飞行器的姿态控制和导航系统中。
通过测量飞行器的位置和姿态,可以实现飞行器的稳定飞行和精确导航。
三、四轮定位的局限性1. 环境限制:四轮定位系统在使用过程中对环境要求较高,需要在有明确标志或参考物的环境中进行定位。
在没有参考物的开放环境或复杂环境中,四轮定位系统可能无法准确测量位置和姿态。

四轮定位基本参数及其影响四轮定位仪作为一种检测仪器,成为汽车维修工作中必不可少的维修设备。
四轮定位的主要定位参数包括:前束角、外倾角、主销内倾角、主销后倾角。
定位参数对于汽车的操控性、安全性以及耗油量等有重大影响。
是现代轿车维护、维修的重要项目标签:四轮定位;底盘参数;车辆工程0 引言四轮定位已经成为发达国家车辆年检的主要参数之一,和制动、排放一样,四轮定位的参数直接决定了车辆是否能在路上充分发挥性能保证安全性。
因此,长期使用的车辆需每半年进行一次定位,如果遇到事故则在维修后马上需进行定位。
四轮定位的主要参数有外倾角、前束角、主销后倾角、主销内倾角、包容角和摩擦半径。
除此之外,影响定位性能的还有推理角、转向前展、车轴偏角和行驶高度。
一般来说,最常见的麦弗逊悬挂只有前轮前束是原生可调的,也是影响性能最直观的因素。
前轮和后轮的外倾、主销后倾和主销内倾可以通过加装调整臂等方式进行调整,因此,本文着重介绍上述参数。
1 外倾角车轮外倾角(camber angle)是指车轮中心平面和地面铅垂线形成的夹角。
车轮顶部向外倾斜时,车轮中心线在铅垂线外侧,这样的倾角称之为正外倾角(positive camber)。
车轮顶部向内倾斜时,车轮中心线在铅垂线内侧,这样的倾角为负外倾角(negative camber)。
当车轮中心线与铅垂线重合时,为零外倾角。
正外倾角的主要作用有四个方面:一是由于汽车自重和载重,会产生不需要的负外倾角,导致车轮与地面呈一定夹角,磨损轮胎,在货运车辆上,这种负外倾角会加剧轴承和衬套的不平衡压力,降低其耐用性能。
二是一定的正外倾角可以减小转向所需的操纵力,使转向更为灵活轻便。
三是减轻轮毂轴承负荷,防止车轮有脱滑趋势,一定的正外倾角可以使路面的反向作用力产生一个沿车轴线向内的分力,有助于防止车轮长期有向外脱滑的趋势导致外轴承和轴头螺母压力过大。
四是正外倾角还可以降低转向节负荷,防止转向节过早变形。