超声波传感器的设计与应用演示教学
- 格式:doc
- 大小:4.07 MB
- 文档页数:27
小学信息技术《超声波传感器》优质教案、教学设计师展示)超声波指令模块是用来控制超声波传感器的,让机器人能够测量距离并进行相应的动作。
我们可以通过编写程序来实现这个功能。
请看视频了解,师播放视频展示超声波指令模块的使用方法。
总结:通过编写程序,利用超声波指令模块控制超声波传感器,实现机器人测距并进行相应动作的功能。
贴课题板书:超声波指令模块)三)合作探究1、制作测距机器人师分组指导)同学们分组制作测距机器人,利用超声波传感器和超声波指令模块测量机器人与桌面、天花板之间的距离,并在程序中设置相应的动作。
贴课题板书:测距机器人)2、制作智能避障机器人师分组指导)同学们分组制作智能避障机器人,利用超声波传感器和分支结构编写程序,实现机器人自动避开障碍物的功能。
贴课题板书:智能避障机器人)3、创意设计智能机器人师引导)同学们可以根据自己的想法和创意,综合应用本节所学知识,设计自己的智能机器人,并在实践中体验创客的过程。
贴课题板书:创意设计智能机器人)六、课后作业完成任务单上的练题,并设计自己的智能机器人,准备下节课展示。
想知道桌面与天花板之间的距离吗?通过连接机器人后,我们可以使用超声波传感器来测量距离。
首先,需要找到相应的指令让机器人说出测得的距离。
小组合作,进行操作和检测距离,同时估测所测数值的单位。
完成任务的小组可以贴一颗星在组长任务单上。
学会使用超声波传感器检测距离后,可以思考制作智能避障机器人。
任务提示是设定板载按钮启动后,如果机器人与障碍物间距离小于10cm,机器人就避障;否则继续前进。
小组合作探究完成任务,通过编程演示交流,使用流程图呈现算法。
需要加入分支结构和重复执行指令,使机器人具有智能性。
完成任务的小组可以贴两颗星在组长任务单上。
在合作探究中,小组可以共同补充完善制作智能避障机器人的想法和算法。
通过互帮互助,共同进步。

综合实践研究性学习开展创新性活动品位创新的快乐《有趣的超声波传感器》市丰台区丰台第五小学郝劲峰Word资料一、指导思想与理论依据(一)指导思想综合实践的总目标是密切学生与生活的联系,推进学生对自然、社会和自我之在联系的整体认识与体验,发展学生的创新能力、实践能力以及良好的个性品质。
(二)理论依据1. 坚持学生的自主选择和主动参与,发展学生的创新精神和实践能力综合实践活动的实施要以学生的直接经验或体验为基础,将学生的需要、动机和兴趣置于核心地位,充分发挥学生的主动性和积极性,鼓励学生自主选择活动主题,积极开展活动,在活动中发展创新精神和实践能力。
2. 面向学生完整的生活领域,为学生提供开放的个性发展空间综合实践活动的实施是面向学生完整的生活领域,引领学生走向现实的社会生活,促进学生与生活的联系,为学生的个性发展提供开放的空间。
3. 注重学生的亲身体验和积极实践,促进学习方式的变革综合实践活动的实施强调学生乐于探究、勤于动手和勇于实践,注重学生在实践性学习活动过程中的体验和感受,要求学生超越单一的接受学习,亲身经历实践过程,体验实践活动,实现学习方式的变革。
二、教材分析1.教学容:《有趣的超声波传感器》是我校自主开发的机器人校本课程中的四年级部分。
本课共分为两课时,第一课时,学生学习认识超声波的概念,理解超声波传感器测距的原理,并能够使用超声波进行实际距离的测量。
本节课重点在与超声波在程序中的应用,通过超声波等待模块的使用来实现自动停车,机器人避障的效果,让学生感受程序与传感器共用所带来的神奇与乐趣。
2.知识背景:(1)声波:发声体产生的振动在空气或其他物质中的传播叫做声波。
根据震动频率及人耳朵能够听到的围分为次声波(震动频率20赫兹一下),声波(震动频率在20-20000赫兹之间),超声波(震动频率在20000赫兹以上)(2)超声波:声音的震动频率在20000赫兹以上,超出人耳朵能够听到的围的声波。
《超声波传感器》教学设计一、目标设计(一)通过师生交流、观看视频,探究蝙蝠仿生学,了解超声波传感器的作用和原理。
(二)通过自主探究、小组合作,制作测距机器人检测桌面与天花板间的距离,掌握超声波指令模块的使用方法。
(三)自主探究、小组合作,利用超声波传感器制作智能避障机器人,学会用分支结构解决判断问题;综合应用本节所学知识,发挥创意设计自己的智能机器人。
在动手实践中感受创客的过程,培养算法思维能力。
二、评价设计目标(一)评价:知道超声波传感器的测距作用,说出测距原理。
目标(二)评价:能够利用“超声波”指令模块检测桌面与天花板之间的距离。
目标(三)评价:能够利用超声波传感器和分支结构编写程序设计智能避障机器人。
综合运用所学知识,发挥创意设计自己的智能机器人。
三、课前准备编程软件、机器人、超声波传感器、PPT、任务单四、教学重难点重点:能够使用超声波传感器实现机器人智能避障。
难点:将分支结构设计思维应用于问题的实践解决,培养学生算法思维。
五、教学流程设计(一)创设情境通过上节课的学习,同学们学会了利用电机让机器人跑起来,但是又遇到了新问题。
请看视频:播放机器人撞上障碍物(墙)的视频。
提出问题:视频中发生了什么状况?你想如何改进机器人,让它变得更智能?【预设:自动避障】提出问题:我们需要什么传感器来实现机器人自动避障?【引导:蝙蝠,一种夜行动物。
在伸手不见五指的黑夜却能灵活躲避障碍物。
它是如何做到的?】师生交流,师播放视频展示超声波原理:蝙蝠一边飞,一边从嘴里发出一种声音。
这种声音叫做超声波,人的耳朵是听不见的,蝙蝠的耳朵却能听见。
超声波像波浪一样向前推进,遇到障碍物就反射回来,传到蝙蝠的耳朵里,蝙蝠就立刻改变飞行的方向。
人们从蝙蝠身上得到了启示,研制了一种能够测距离的传感器叫作超声波传感器。
贴板书:(二)新授1、认识超声波传感器(师拿小车演示)它就像机器人的“大眼睛”,能够帮助机器人检测自己与其他物体之间的距离。
《仿真体验使用超声波传感器》教学设计教材分析:依据《中小学信息技术课程指导纲要(试行)》规定的拓展模块“认识智能机器人,了解智能机器人的相关概念、分类、应用与发展,尝试设计、制作简易教学机器人”设置,我们的教材(宁夏教育厅教研室编著电子工业出版社)将机器人基础安排在六年级(下)册进行学习。
教材借助萝卜圈虚拟仿真平台引导学生学习机器人基础知识并学会搭建机器人,接着让学生以一名“驾驶员”的身份,在不断完善搭建机器人的基础上,通过“小试牛刀”、“新手上路”、“展示技艺”、“一鼓作气”系列任务,经历将一台机器逐渐变成智能机器人的过程,最后帮助学生总结积累编程经验,过渡到模块化程序,为今后学习打下基础。
本单元介绍超声波传感器和灰度传感器的工作原理,学习给机器人(仿真/实物)添加超声波传感器和灰度传感器组件,通过完成“精准停靠”和“遵守交规”任务,学习使用超声波传感器、灰度传感器及取灰度值的方法(仿真/实物)、理解并运用递归调用、条件循环与条件判断的嵌套及算法流程图。
《仿真体验使用超声波传感器》是第四单元《新手上路》第三节教学内容,本节课主要围绕在仿真环境中,通过安装了超声波传感器的轮式车形机器人,在LOGO 语言程序精确控制下,完成“精准停靠”任务,是在第三单元“安全出站”的基础上让机器人更智能,也为以后课程中所用到的传感器和任务做出准确判断打下基础。
学情分析:本节课教学对象为乌鲁木齐八一中学附小的六年级学生。
就学习情感而言这个年龄段的孩子接受信息技术能力强,对智能机器人既熟悉又陌生,对它的探索欲望强烈;从学习情况看六年级学生接触过Scratch可视化编程语言,对程序有一定的概念,对软件的学习也有一定的迁移能力,但没有LOGO 语言编程、搭建仿真机器人基础,因此学习本课学生可能存在的困难有:1、用LOGO语言编写程序指挥机器人运行不太顺利。
2、对递归调用、条件判断语句的理解及程序的输入上存在困难。
教学目标:基于信息技术课程指导纲要、学科核心素养,并立足学生实际,认真分析教材的基础上,确定以下教学目标:1、根据超声波传感器的功能编写程序,学习在仿真环境中使用超声波传感器。
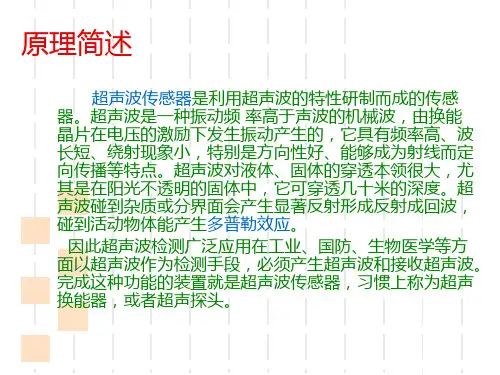
超声波传感器的设计与应用传感器课程设计(2010级)题目:超声波传感器的设计与应用学员姓名:xxx学号:201003011020学员姓名:xxx学号:201003011027学员姓名:xxx学号:201003011003 xxx二〇一三年九月目录...............................................................................................................................................第一章超声波传感器简介........................................................................................1.1超声波传感器是什么 (2)1.2超声波传感器应用前景 (2)第二章超声波传感器设计 (3)2.1设计目标描述 (3)2.2 设计指标 (3)2.3 传感器结构概述 (4)2.4 传感器设计原理 (4)2.4.1 物理部分设计 (4)2.4.2 电路部分设计 (7)第三章硬件设计 (8)3.1 单片机设计 (8)3.2 传感器设计 (11)3.3 单片机与传感器连接 (12)第四章软件设计 (13)4.1 总体设计思路 (13)4.2 软件程序 (13)第五章测试结果与分析 (21)第六章结论 (22)参考文献 (24)第一章超声波传感器的设计1.1超声波传感器是什么超声波传感器是利用超声波的特性研制而成的传感器。
超声波是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生振动产生的,它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。
超声波对液体、固体的穿透本领很大,尤其是在阳光不透明的固体中,它可穿透几十米的深度。
超声波碰到杂质或分界面会产生显著反射形成反射成回波,碰到活动物体能产生多普勒效应。
因此超声波检测广泛应用在工业、国防、生物医学等方面。
1.2超声波传感器应用前景随着科学技术的快速发展,超声波将在传感器中的应用越来越广。
在人类文明的历次产业革命中,传感技术一直扮演着先行官的重要角色,它是贯穿各个技术和应用领域的关键技术,在人们可以想象的所有领域中,它几乎无所不在。
传感器是世界各国发展最快的产业之一,在各国有关研究、生产、应用部门的共同努力下,传感器技术得到了飞速的发展和进步。
但就目前技术水平来说,人们可以具体利用的传感技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。
展望未来,超声波传感器作为一种新型的非常重要有用的工具在各方面都将有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求,如声纳的发展趋势基本为:研制具有更高定位精度的被动测距声纳,以满足水中武器实施全隐蔽攻击的需要;继续发展采用低频线谱检测的潜艇拖曳线列阵声纳,实现超远程的被动探测和识别;研制更适合于浅海工作的潜艇声纳,特别是解决浅海水中目标识别问题;大力降低潜艇自噪声,改善潜艇声纳的工作环境。
无庸置疑,未来的超声波传感器将与自动化智能化接轨,与其他的传感器集成和融合,形成多传感器。
随着传感器的技术进步,传感器将从具有单纯判断功能发展到具有学习功能,最终发展到具有创造力。
在新的世纪里,面貌一新的传感器将发挥更大的作用。
第二章超声波传感器设计2.1设计目标描述此次,我们所设计的超声波传感器预计将应用在日常生活中一些电子产品之中。
所以,我们所设计的超声波传感器很多相应的指标,要求不会很高。
从而相应降低成本。
而在体积方面也不是特别小。
2.2设计指标工作电压:DC 5 V工作电流:15 mA工作频率:40 Hz工作温度:-10~+70℃工作频率:40kHz图2-1 超声波传感最远射程:4 m最近射程:2 cm测量角度:15度输入触发信号:10 us的TTL脉冲输出反馈信号:与射程成比例的TTL输出信号2.3 传感器结构概述如图2-3所示,我们所设计的超声波传感器的结构主要部分是一个锥形振子和双压电陶瓷晶片。
当压电陶瓷晶片的两极外加电压脉冲信号时,压电晶片利用逆压电效应产生振动。
当脉冲信号的频率等于压电晶片的固有频率时,将产生共振效应,从而产生超声波。
超声波以疏密形式传播传给接收器。
接受器中的压电晶片也会相应振动,利用压电效应产生电信号。
实际上这种变化的电信号是很小的,因此要用放大电路去放大。
2.4 传感器设计原理图2-3传感器结构示意2.4.1物理部分设计压电材料是超声波传感器的关键部分,现在市场较多使用压电陶瓷作为超声波传感器的敏感原件。
那么,压电陶瓷的振动模式和它的具体材料将决定超声波的谐振频率。
由于我们所需的工作频率是40kHz,可选的震动模式有两种,一个是薄长条的长度伸缩振动模式,其振动的频率范围是:15~200kHz;另一个是圆片厚度弯曲振动模式,其振动的频率范围是:2~70kHz。
我们选择第二种,因为它的范围更接近。
于是,有是谐振频率,是频率常数与材料有关,t是厚度,D是直径。
当把两个厚度相同,有电极的圆形压电陶瓷片粘连在一起时,可以产生弯曲振动,极化方向相反时,以串联方式接入电源,在电场激励下,整个陶瓷片就会产生厚度弯曲振动。
我们在下面的公式推导中,我们以矩形(正方形)模拟圆形。
对于薄板的小挠度弯曲振动其形变分量可表示为:其中,u为板的挠度。
则其压电方程可以简化为:其中,Ez及Dz为厚度方向的电场及电位移分量,和是弹性柔顺常数,是压电应变常数,为自由节点常数分量。
令称为机械耦合系数。
则:由(1)得由产生的弯矩可表示为计算此积分,将(3)代入(4)得到:根据力矩平衡方程,在不计转动的情况下可得:由此可得到矩形薄板绕y轴的弯曲振动方程:由(7)可得矩形薄板绕y轴弯曲振动的位移分布:同理做类似的推导,我们也可以得到矩形薄板绕x轴的弯曲振动的位移方程。
并最终得到共振频率的方程:当薄板压电陶瓷振子的材料,几何尺寸及振动模式给定后可得出关于频率的根。
我们所使用的材料是钛酸铅,其密度是7.7g/,居里温度是520℃,相对介电常数150,压电系数是-6.8,是56,弹性系数为7.8,品质因数是1300。
通过这些参数,推算出我们的传感器的直径大概为9.3mm ,厚度约是0.7mm 。
由此根据最开始的频率公式可以算出我们的压电振子的实际共振频率为38kHz 。
物理部分我们从给出的条件开始,由材料所处运动状态求得材料尺寸,在由最初公式,得到实际频率是多少,来说明物理设计过程2.4.2电路设计部分压电元件在受到敏感轴向外力作用以后,会在电极表面产生不同极性的电荷,因此,他相当于一个电荷器,又相当于一个平板电容器,于是它就有两种等效电路,一种是电荷源等效电路,另一种是电压源等效电路。
如图2-4:压电式传感器相当于平板电容器,所以内部阻抗很高,因此输出信号很小,不能直接显示和记录,需要进行阻抗变换和放大,所以测量电路的作用是:①阻抗变换器,将高阻抗变为低阻抗;②信号放大器,进行电压放大和电荷放大。
图2-4 压电元件等效电路图第三章硬件设计3.1单片机设计本次实验选择mini80E开发板,如图3-1:超声波传感器测距,利用了它如下的功能:(1)8个高亮数码管显示用于显示所测的距离,第二位为千位,依次第三位为百位,第四位图3-1 开发板实物图图3-2数码管原理及实物为十位,第五位为个位。
数据的单位为cm,所测的距离在2-400cm 之间。
(2) 8个高亮发光二极管(跑马灯、指示灯、红绿灯)低电平时LED点亮,高电平时LED熄灭。
LED2为传感器的控制口,一直处于低电平状态,亮红灯。
实验用LED3-8指示距离的远近,当距离在0-40cm时,LED3点亮;当距离在40-80cm时,LED4点亮,同时其他灯熄灭;当距离在当距离在80-120cm时,LED5点亮,同时其他灯熄灭;以此类推,120-160cm时,LED6点亮;160-200cm时, LED7点亮;160-200cm时,LED8点亮。
(3)独立按键图3-3LED灯原理及实物独立按键软件操作简单,主要检测按键连接的IO口是否为0,为0表示按键按下,实验利用按键完成数据的保持与重新测距功能。
当s2按下时,显示在数码管上的数据将保持不变,便于检测者记录数据;当s1按下时,传感器开始重新测距,并显示新的数据。
(4)定时器利用16位的定时器,实现时间的累加,利用发出超声波与接收的时间差来计算出所测的距离。
(5)STC12C5A60S2芯片STC12C5A60S2单片机具有如下特点1、具有电源指示;2、所以I/O口以引出;3、可以实现与电脑串口通信;4、可以实现双串口通讯;5、具有上电复位和手动复位;6、附带SD卡读写接口;7、支持STC串口下载;8、双串口通讯(注:只能使用串口一下载程序);9、八路LED灯(注:可拔出短路帽,断开LED灯);10、可端子接线供电、可排针引电;11、7805供电,输入电压范围宽,且确保AD参考电压准确。
STC12C5A60S2单片机的工作电压为直流 4.5~5.5伏(或者USB供电)(6)标准的RS232通信接口(PC通信)图3-5 STC实物图3-6 RS232实RS232芯片用于电压转换,将电脑电平转换成TTL电平。
在开发板上我们主要使用了三根线,发送线TXD,接收线RXD,地线GND。
它主要用于基础的串口通信(使用串口调试程序进行调试),和STC单片机程序的在线下载。
(7)USB电源输入使用了USB将电脑与单片机相接,用于直流电源供电。
电压为5V。
3.2 传感器设计采用了 HC-SR04超声波传感器,如图3-10:图3-7 通讯接口原理图图3-8 USB电源输入原理图3-9 USB电源输入实物图图3-10 超声波传感器实物使用方法:工作时,一个控制口发一个10US以上的高电平,就可以在接收口等待高电平输出.一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,方可算出距离.3.3 单片机与传感器连接用了杜邦线,将传感器与单片机相连,一共四根线。
地线,电源线,控制线与接收线。
其中,定义P1.0口为控制线,控制传感器超声波的发射,P3.2口为接收线,用于接收遇到障碍物返回的超声波。
电源线与开发板的5v电源接口相连,地线与开发板的地线相连。
如图3-11图3-11 开发板接线图第四章软件设计4.1总体设计思路超声波测距的原理是借助于超声波脉冲回波渡越时间法来实现的。
因此,主要由定时器来完成时间的累加,将超声波的发射时间与被接收到的时间间隔得到并存放在寄存器中,再由公式计算出传感器到目标的距离,并显示在数码显示管上。