边缘提取
- 格式:doc
- 大小:86.00 KB
- 文档页数:3
《聊聊罗伯特方法提取边缘计算题》嘿,朋友!今天咱来唠唠一个超有意思的玩意儿——罗伯特方法提取边缘计算题。
这名字听着是不是有点高大上?但别被它唬住啦,其实没那么难理解。
咱先说说啥是罗伯特方法。
这就像是一个魔法小技巧,能把图像的边缘给找出来。
就好像你在画画的时候,想把物体的轮廓画得更清楚,罗伯特方法就是那个能帮你把轮廓变得更明显的神奇招数。
那这个罗伯特方法咋用在计算题上呢?嘿嘿,这可就有点门道了。
比如说,有一个图像,咱想知道它的边缘在哪里。
通过一些数学运算,就能用罗伯特方法把边缘给算出来。
这就跟玩解谜游戏似的,一步一步地找到答案。
想象一下,你就像一个小侦探,拿着罗伯特方法这个秘密武器,去解开图像边缘的谜题。
每一步计算都像是在寻找线索,一点一点地接近真相。
可能一开始你会觉得有点晕乎,这都是正常的。
别着急,咱慢慢琢磨。
可以先从简单的例子开始,熟悉一下这个方法的套路。
等你掌握了窍门,就会发现它其实挺好玩的。
比如说,有一个小小的图形,咱用罗伯特方法去算它的边缘。
看着那些数字和公式,别害怕,把它们当成你的小伙伴。
跟它们聊聊天,问问它们该怎么组合才能找到边缘。
也许在计算的过程中会遇到一些小挫折,算错了或者卡住了。
没关系呀!这都是学习的过程。
就像你走路摔了一跤,爬起来拍拍土,继续往前走。
而且,当你终于算出了图像的边缘,那种成就感可别提了!就像你解开了一个超级难的谜语,心里那叫一个美。
所以说,别被罗伯特方法提取边缘计算题这个名字吓住。
大胆地去尝试,去探索。
说不定你会发现自己原来是个计算小天才呢!加油哦,小伙伴!让我们一起在罗伯特方法的世界里玩耍,解开一个又一个的边缘谜题。
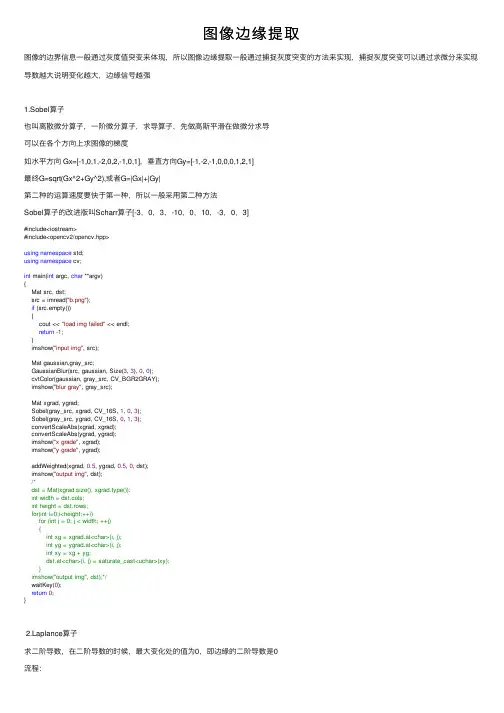
图像边缘提取图像的边界信息⼀般通过灰度值突变来体现,所以图像边缘提取⼀般通过捕捉灰度突变的⽅法来实现,捕捉灰度突变可以通过求微分来实现导数越⼤说明变化越⼤,边缘信号越强1.Sobel算⼦也叫离散微分算⼦,⼀阶微分算⼦,求导算⼦,先做⾼斯平滑在做微分求导可以在各个⽅向上求图像的梯度如⽔平⽅向 Gx=[-1,0,1,-2,0,2,-1,0,1],垂直⽅向Gy=[-1,-2,-1,0,0,0,1,2,1]最终G=sqrt(Gx^2+Gy^2),或者G=|Gx|+|Gy|第⼆种的运算速度要快于第⼀种,所以⼀般采⽤第⼆种⽅法Sobel算⼦的改进版叫Scharr算⼦[-3,0,3,-10,0,10,-3,0,3]#include<iostream>#include<opencv2/opencv.hpp>using namespace std;using namespace cv;int main(int argc, char **argv){Mat src, dst;src = imread("b.png");if (src.empty()){cout << "load img failed" << endl;return -1;}imshow("input img", src);Mat gaussian,gray_src;GaussianBlur(src, gaussian, Size(3, 3), 0, 0);cvtColor(gaussian, gray_src, CV_BGR2GRAY);imshow("blur gray", gray_src);Mat xgrad, ygrad;Sobel(gray_src, xgrad, CV_16S, 1, 0, 3);Sobel(gray_src, ygrad, CV_16S, 0, 1, 3);convertScaleAbs(xgrad, xgrad);convertScaleAbs(ygrad, ygrad);imshow("x grade", xgrad);imshow("y grade", ygrad);addWeighted(xgrad, 0.5, ygrad, 0.5, 0, dst);imshow("output img", dst);/*dst = Mat(xgrad.size(), xgrad.type());int width = dst.cols;int height = dst.rows;for(int i=0;i<height;++i)for (int j = 0; j < width; ++j){int xg = xgrad.at<char>(i, j);int yg = ygrad.at<char>(i, j);int xy = xg + yg;dst.at<char>(i, j) = saturate_cast<uchar>(xy);}imshow("output img", dst);*/waitKey(0);return0;}plance算⼦求⼆阶导数,在⼆阶导数的时候,最⼤变化处的值为0,即边缘的⼆阶导数是0流程:⾼斯模糊去噪GaussianBlur()转为灰度值cvtColor()Laplance⼆阶导数计算Laplancian()取绝对值convertScaleAbs()显⽰结果#include<iostream>#include<opencv2/opencv.hpp>using namespace std;using namespace cv;int main(int argc, char **argv){Mat src, dst;src = imread("b.png");if (src.empty()){cout << "load img failed" << endl;return -1;}imshow("input img", src);Mat gaussian,gray_src;GaussianBlur(src, gaussian, Size(3, 3), 0, 0);cvtColor(gaussian, gray_src, CV_BGR2GRAY);imshow("blur gray", gray_src);Laplacian(gray_src, dst, CV_16S,3);convertScaleAbs(dst, dst);imshow("Laplacian", dst);threshold(dst, dst, 0, 255, THRESH_OTSU | THRESH_BINARY);imshow("output img", dst);/*dst = Mat(xgrad.size(), xgrad.type());int width = dst.cols;int height = dst.rows;for(int i=0;i<height;++i)for (int j = 0; j < width; ++j){int xg = xgrad.at<char>(i, j);int yg = ygrad.at<char>(i, j);int xy = xg + yg;dst.at<char>(i, j) = saturate_cast<uchar>(xy);}imshow("output img", dst);*/waitKey(0);return0;}3.Canny边缘检测步骤:⾼斯模糊 GaussianBlur灰度转换cvtColor计算梯度Sobel/Scharr⾮最⼤信号抑制⾼低阈值输出⼆值图像⾮最⼤信号抑制需要计算梯度⽅向T1为低阈值,T2为⾼阈值,凡是⾼于T2的都保留,凡是低于T1的都丢弃,从⾼于T2的像素出发,凡是⼤于T1且相互连接的都保留,最终得到⼀个输出⼆值图像推荐的⾼低阈值⽐为3:1或2:1Canny(src,dst,threshold_low,threshold_high,Sobel_size,Lwgradient)最后⼀个如果是true就⽤L2归⼀化(开根),如果不是就L1归⼀化(绝对值),⼀般⽤L1 #include<iostream>#include<opencv2/opencv.hpp>using namespace std;using namespace cv;Mat src, dst, gray_src, gaussian;int t1_value = 50;int max_value = 255;const char* OUTPUT_TITLE = "Canny Result";void Canny_Demo(int,void*);int main(int argc, char **argv){//Mat src, dst;src = imread("b.png");if (src.empty()){cout << "load img failed" << endl;return -1;}imshow("input img", src);//Mat gaussian,gray_src;//GaussianBlur(src, gaussian, Size(3, 3), 0, 0);namedWindow(OUTPUT_TITLE, CV_WINDOW_AUTOSIZE);cvtColor(src, gray_src, CV_BGR2GRAY);createTrackbar("Threshold Value :", OUTPUT_TITLE, &t1_value, max_value, Canny_Demo);Canny_Demo(0, 0);waitKey(0);return0;}void Canny_Demo(int, void*){Mat edge_output;blur(gray_src, gray_src, Size(3, 3), Point(-1, -1), BORDER_DEFAULT);Canny(gray_src, edge_output, t1_value, t1_value * 2, 3, false);//dst.create(src.size(), src.type());//src.copyTo(dst, edge_output);imshow(OUTPUT_TITLE, ~edge_output);}去掉注释会变成彩⾊图,注意修改imshow中的输出变量。
边缘提取以及边缘增强是不少图像处理软件都具有的基本功能,它的增强效果很明显,在用于识别的应用中,图像边缘也是非常重要的特征之一。
图像边缘保留了原始图像中相当重要的部分信息,而又使得总的数据量减小了很多,这正符合特征提取的要求。
在以后要谈到的霍夫变换(检测图像中的几何形状)中,边缘提取就是前提步骤。
这里我们只考虑灰度图像,用于图像识别的边缘提取比起仅仅用于视觉效果增强的边缘提取要复杂一些。
要给图像的边缘下一个定义还挺困难的,从人的直观感受来说,边缘对应于物体的边界。
图像上灰度变化剧烈的区域比较符合这个要求,我们一般会以这个特征来提取图像的边缘。
但在遇到包含纹理的图像上,这有点问题,比如说,图像中的人穿了黑白格子的衣服,我们往往不希望提取出来的边缘包括衣服上的方格。
但这个比较困难,涉及到纹理图像的处理等方法。
好了,既然边缘提取是要保留图像的灰度变化剧烈的区域,从数学上,最直观的方法就是微分(对于数字图像来说就是差分),在信号处理的角度来看,也可以说是用高通滤波器,即保留高频信号。
这是最关键的一步,在此之前有时需要对输入图像进行消除噪声的处理。
用于图像识别的边缘提取往往需要输出的边缘是二值图像,即只有黑白两个灰度的图像,其中一个灰度代表边缘,另一个代表背景。
此外,还需要把边缘细化成只有一个像素的宽度。
总的说来边缘提取的步骤如下:1,去噪声2,微分运算3,2值化处理4,细化第二步是关键,有不少书把第二步就直接称为边缘提取。
实现它的算法也有很多,一般的图像处理教科书上都会介绍好几种,如拉普拉兹算子,索贝尔算子,罗伯特算子等等。
这些都是模板运算,首先定义一个模板,模板的大小以3*3的较常见,也有2*2,5*5或更大尺寸的。
运算时,把模板中心对应到图像的每一个像素位置,然后按照模板对应的公式对中心像素和它周围的像素进行数学运算,算出的结果作为输出图像对应像素点的值。
需要说明的是,模板运算是图像的一种处理手段--邻域处理,有许多图像增强效果都可以采用模板运算实现,如平滑效果,中值滤波(一种消除噪声的方法),油画效果,图像的凹凸效果等等。
matlab 小波变换边缘轮廓提取MATLAB是一种强大的数学计算和编程语言,特别适用于信号处理和图像处理领域。
小波变换是一种在时间和频率域分析信号或图像的方法,对于边缘轮廓提取等任务非常有效。
在MATLAB中,可以使用小波变换进行边缘轮廓提取。
下面是一个简单的步骤指南:导入图像:首先,你需要将图像导入MATLAB。
你可以使用imread函数来读取图像。
例如:matlabimg = imread('input.jpg');转换为灰度图像:如果原始图像是彩色的,你需要将其转换为灰度图像,因为小波变换通常用于处理灰度图像。
你可以使用rgb2gray函数来完成这个任务。
例如:matlabimg_gray = rgb2gray(img);选择合适的小波基函数:选择一个适合你任务的小波基函数。
在MATLAB中,可以使用wfilters函数查看可用的基函数。
例如:matlab[h, g, f] = wfilters('sym8');进行小波变换:使用dwt2函数对图像进行二维小波变换。
例如:matlab[cA2,cH2,cV2,cD2] = dwt2(img_gray,h,g,f);在这里,cA2是近似系数,而cH2, cV2, 和cD2 是水平、垂直和对角线的细节系数。
5. 重构图像:为了看到小波变换的效果,你可以使用idwt2函数重构图像。
例如:matlabimg_recon = idwt2(cA2,cH2,cV2,cD2,h,g,f);显示原始和重构的图像:使用imshow函数来显示原始图像和重构的图像。
例如:matlabsubplot(1,2,1); imshow(img); title('Original Image');subplot(1,2,2); imshow(img_recon); title('Reconstructed Image');提取边缘轮廓:通过小波变换,你可以更好地理解图像中的边缘和纹理。
形态学边缘提取算法引言形态学边缘提取算法是一种基于形态学原理的图像处理算法,用于从图像中提取出目标物体的边缘信息。
通过分析和改变图像中物体的形状和结构,形态学边缘提取算法可以有效地去除图像中的噪声,突出目标物体的边缘特征,为之后的图像分析和识别任务提供基础。
一、形态学基础知识在介绍形态学边缘提取算法之前,我们首先需要了解一些形态学的基本概念和操作。
形态学是一种基于图像形状和结构的数学理论,其主要用于图像的形态学处理和分析。
在形态学中,常用的操作包括膨胀、腐蚀、开运算和闭运算等。
1. 膨胀操作膨胀操作是一种使用结构元素对图像进行扩张的操作。
膨胀可以使物体的边界膨胀和增大,从而连接物体的间断部分。
膨胀操作可以用来填充物体中的空洞或连接相邻物体。
2. 腐蚀操作腐蚀操作是一种使用结构元素对图像进行侵蚀的操作。
腐蚀可以使物体的边界腐蚀和减小,从而分离相邻物体或去除物体的凸起部分。
腐蚀操作可以用来去除图像中的噪声或者分离物体。
3. 开运算和闭运算开运算是指先对图像进行腐蚀操作,再对结果进行膨胀操作的叠加操作。
开运算可以去除图像中的小的噪点并保持物体的整体形状和结构。
闭运算则是先对图像进行膨胀操作,再对结果进行腐蚀操作的叠加操作。
闭运算可以填充图像中的空洞,并保持物体的整体形状和结构。
二、基于形态学的边缘提取算法基于形态学的边缘提取算法主要利用膨胀和腐蚀等形态学操作来突出图像中物体的边缘特征。
下面将介绍几种常见的基于形态学的边缘提取算法。
1. 基于梯度的边缘提取算法基于梯度的边缘提取算法是通过计算图像的梯度来提取物体的边缘信息。
其中,梯度操作是通过对图像应用膨胀和腐蚀操作来计算得到物体的边缘。
一般来说,先对图像进行膨胀操作,再对膨胀结果进行腐蚀操作,最后计算两者之差得到物体的边缘。
2. 基于灰度差分的边缘提取算法基于灰度差分的边缘提取算法是通过计算图像中像素灰度值的差分来提取物体的边缘信息。
其中,差分操作可以通过先对图像进行膨胀操作,再对膨胀结果和原图像进行减法操作得到。
点云边缘特征提取
点云边缘特征提取是指从点云数据中提取出具有边缘特征的点或点云区域。
边缘特征通常表示了物体的边界或者不连续变化的部分,对于点云的分割、识别和重建等任务都具有重要的意义。
以下是几种常用的点云边缘特征提取方法:
1. 法线估计:通过计算点云中每个点的法线方向,可以获得点云的法线信息。
边缘通常对应着法线变化较大的区域。
2. 曲率计算:曲率表示了点云表面的弯曲程度。
可以通过计算点云上每个点的曲率来判断点云是否存在边缘区域。
3. 点云聚类:通过将点云数据进行聚类,可以将边缘区域与其他区域分开。
一种常用的点云聚类算法是基于区域生长的方法。
4. 深度图像分析:将点云数据转换为深度图像,然后使用传统的边缘检测算法,如Canny算法等,来提取边缘特征。
5. 高斯曲率计算:高斯曲率表示了点云曲面的凸凹性。
可以通过计算点云上每个点的高斯曲率来找到边缘区域。
6. 深度学习方法:近年来,深度学习方法在点云处理领域取得了很大的进展。
可以使用深度学习模型来提取点云的边缘特征,如PointNet, PointNet++, PointCNN等。
以上是一些常见的点云边缘特征提取方法,具体选择方法可以根据应用需求和实际情况来确定。
形态学边缘提取算法一、概述形态学边缘提取算法是图像处理中的一种重要算法,它可以用于图像分割、目标检测等领域。
该算法基于形态学理论,通过对图像进行膨胀和腐蚀操作,从而得到目标的边缘信息。
二、形态学基础知识1. 结构元素结构元素是形态学操作中的一个重要概念,它是一个小的二值图像,用于对原始图像进行变换。
常见的结构元素有矩形结构元素、十字形结构元素、圆形结构元素等。
2. 膨胀操作膨胀操作是指将结构元素沿着原始图像进行卷积运算,并将结果与原始图像进行比较,得到新的二值图像。
膨胀操作可以使目标区域变大,并填充空洞。
3. 腐蚀操作腐蚀操作是指将结构元素沿着原始图像进行卷积运算,并将结果与原始图像进行比较,得到新的二值图像。
腐蚀操作可以使目标区域变小,并去除孤立点。
三、基本思路1. 对原始灰度图像进行二值化处理。
2. 对二值图像进行膨胀操作。
3. 对膨胀后的图像进行腐蚀操作。
4. 将原始二值图像与经过腐蚀后的图像进行比较,得到边缘信息。
四、具体实现1. 二值化处理二值化处理是将灰度图像转换为二值图像的过程。
常用的方法有全局阈值法、自适应阈值法等。
在形态学边缘提取算法中,一般采用全局阈值法将灰度图像转换为二值图像。
2. 膨胀操作对于给定的结构元素,设其大小为n×m,则对于原始图像I(x,y),结构元素B(i,j),其卷积运算结果为:D(x,y)=max{I(x+i,y+j)+B(i,j)}其中,max表示取最大值运算。
3. 腐蚀操作对于给定的结构元素,设其大小为n×m,则对于原始图像I(x,y),结构元素B(i,j),其卷积运算结果为:E(x,y)=min{I(x+i,y+j)-B(i,j)}其中,min表示取最小值运算。
4. 边缘提取将经过腐蚀后的二值图像与原始二值图像进行比较,得到边缘信息。
常用的方法有差异运算、梯度运算等。
其中,差异运算可以表示为:S(x,y)=I(x,y)-E(x,y)五、优化方法1. 多尺度形态学边缘提取多尺度形态学边缘提取是指对图像进行不同尺度的膨胀和腐蚀操作,从而得到多个尺度的边缘信息。
matlab边缘提取及拟合边缘提取及拟合是数字图像处理中的一个重要的步骤。
边缘可以用于图像分割、物体识别、目标跟踪等领域。
本文将介绍边缘提取的常用方法以及拟合方法,并结合MATLAB代码进行讲解。
一、边缘提取方法1. Sobel算子Sobel算子是一种基于梯度的边缘检测算法,其原理是利用像素点周围的灰度值来计算梯度,从而得到边缘。
在MATLAB中,可以使用imgradient函数实现Sobel算子。
代码示例:I = imread('lena.png');[Gx, Gy] = imgradientxy(I);[Gmag, Gdir] = imgradient(Gx, Gy);imshowpair(Gmag, Gdir, 'montage');2. Canny算子Canny算子是一种基于多级阈值的边缘检测算法,其原理是先通过高斯滤波器对图像进行平滑处理,然后计算梯度,再进行非极大值抑制和双阈值分割,最后得到边缘。
在MATLAB中,可以使用edge函数实现Canny算子。
代码示例:I = imread('lena.png');BW = edge(I, 'canny');imshow(BW);二、拟合方法1. 直线拟合直线拟合是一种常用的边缘拟合方法,其原理是通过最小二乘法对边缘点进行拟合,从而得到一条直线。
在MATLAB中,可以使用polyfit函数实现直线拟合。
代码示例:I = imread('lena.png');BW = edge(I, 'canny');[H, T, R] = hough(BW);P = houghpeaks(H, 10);lines = houghlines(BW, T, R, P);imshow(I), hold onmax_len = 0;for k = 1:length(lines)xy = [lines(k).point1; lines(k).point2];plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green');% Plot beginnings and ends of linesplot(xy(1,1),xy(1,2),'x','LineWidth',2,'Color','yellow');plot(xy(2,1),xy(2,2),'x','LineWidth',2,'Color','red');% Determine the endpoints of the longest line segmentlen = norm(lines(k).point1 - lines(k).point2);if ( len > max_len)max_len = len;xy_long = xy;endend2. 圆拟合圆拟合是一种边缘拟合方法,其原理是通过最小二乘法对边缘点进行拟合,从而得到一个圆。

1.几种算子图像边缘提取:程序代码如下:运行结果:原图为一堆苹果(彩图),各算子处理后的边缘提取图:分水岭算法实现:a.直接对图像进行分水岭算法处理代码如下:(原图还是上题一堆苹果)运行结果如右图:很明显,属于过度分割了。
下面有改进算法:b.改进算法代码如下:实现包括下列步骤:(1)读图像。
读入图像(2)对比度最大化。
注意到图像中有许多彼此连通的不同大小的对象。
为使通过watershed变换找到的低谷数目最小,我们使感兴趣的对象的对比度达到最大。
对比度增强的一个常用的技术是综合应用top—hat和bottom—hat变换。
top—hat变换定义为原图像和它的开之差。
图像的开是一与特定结构元素匹配的图像前景部分的集合。
bottom—hat变换定义为在原图像和它的闭之间的差。
图像的闭是一与特定结构元素匹配的图像背景的集合。
通用的结构元素是正方形,长方形,圆盘,菱形,球和线。
既然图像中我们感兴趣的目标对象看起来像圆盘,我们用strel函数建立一个半径为15个像素的圆盘形结构元素。
这个圆盘尺度是图像中的目标对象的平均半径的一个估计。
(3)图像相加减。
为使目标对象与分隔它们的间隙之间的对比达到最大,用“原图top—hat图像+bottom—hat图像”得到增强的结果图。
(4)转换感兴趣的对象。
调用watershed变换找出图像的亮度”低谷”,把imcomplement作用增强过的图像上,将感兴趣的目标对象转换为亮度低谷,得到增强图的补图。
(5)检测亮度低谷。
对所得补图运用imextendedmin函数检测低于某特别阈值的所有亮度低谷。
imextendedmin函数的输出是一个二值(逻辑值)图像。
二值图像中重要的是区域的位置而非区域的大小。
用imimposemin函数把补图改为只含有那些由imtendedmin函数找到的低谷,并将低谷的像素值变为O(8位图像可能的深谷)。
(6)watershed分割。
通过watershed变换,可找出来所有含有强加给最小值的区域。
![[整理]图像锐化和边缘提取](https://uimg.taocdn.com/45876d836aec0975f46527d3240c844769eaa08d.webp)
字图像处理》实验报告2012年安徽省普通高校对口招收中等职业学校毕业考试语文试题(本卷满分150分,时间120分钟)一.语言文学知识与语言表达(共11小题,每小题3分,计33分)1.下列句子中加点字的注音,正确的一项是( )A.殷(yān)红的鲜血滴落在泥土上。
B.她梦想到盛(shèng)在名贵盘碟里的佳肴。
C.第二步工作叫掐丝,就是拿扁铜丝粘(nián)在铜胎表面上。
D.仿佛远处高楼上渺茫的歌声似(sì)的。
2.下列句子没有错别字的一项是( )A.得知我还必需回渡假村,她楞住了。
B.住宅的寒伧,墙壁的暗淡,家俱的破旧,衣料的粗陋,都使她苦恼。
C.归来时带着几份鹊跃的心情,一跳一跳就跳过了那些山坡。
D.丈夫从实验室回来时,孩子们已经做完功课睡觉了。
3.对下列词语中加点字的解释,不正确的一项是( )A.累世(累:连续)勤能补拙(拙:笨)B.睿智(睿:锋利)越俎代庖(庖:厨房)C.绵亘(亘:延续不断)扪心自问(扪:摸)D.自诩(诩:夸耀)自惭形秽(秽:丑陋)4.下列句子成语使用恰当的一项是( )A.贵族老爸们养尊处优的生活场所已消失得杳无音信。
B.过去有些园名,可以望文生义,如梅园,它的特色是梅。
C.在孩子们的眼神里,我看到了他们的心悦诚服。
D.赚钱是每一个生意人众望所归的事。
5.下列句子没有语病的一项是( )A.人脑是一部最奇妙的机器,但它能和平结合,使人成为万物之灵。
B.好的立意,来源于作者对社会生活的用心提炼、体验、思考和观察。
C.母亲在非解释一下不足以平服别人的时候才这样说。
D.人物的塑造,要经过摊牌打磨的过程,才能创造出鲜活的形象。
6.将下列句子组成语意连贯的一段文字,排序正确的一项是( )①当时我很年轻,而且正是不动扳机就感到手痒的时期。
②我察觉到,在这双眼睛里有某种新的东西,某种只有它和这座山才了解的东西。
③我总是认为,狼越少,鹿就越多,因此,没有狼的地方就意味着是猎人的天堂。
图像边缘提取算法研究报告概述图像的边缘包含了图像最重要的信息。
什么是边缘?一般是指图像灰度变化率最大的位置。
从成因上看,一般图像边缘主要由四个方面的因素形成:(1>图像灰度在表面法向变化的不连续造成的边缘;(2>图像对像素在空间上不一致形成的边缘;(3>在光滑的表面上由于颜色的不一致形成的边缘:(4>物体的光影造成的边缘。
图像边缘提取的作用有:(1>改良图像质量;(2>分离对象;(3>理解和重构视觉场景;(4>识别特征;(5>其他。
b5E2RGbCAP 图像边缘检测是图像处理与计算机视觉共同的基本课题,1960年以来,相继发展了一系列采用梯度算子和拉普拉斯算子的边缘检测技术;为了降低图像噪声对边缘检测算法的干扰,1980年以来,又建立了高斯低通滤波与拉普拉斯算子复合的过零点检测Marr-Hildreth 理论;在另一个方向上,1980年代初期,Canny 从信号处理的角度出发,使边缘检测算法更具有实用性。
本报告主要介绍以上以上几个方面的内容,通过matlab 程序实现以上几种算法,对比各种算法的性能。
p1EanqFDPw 算法介绍及相应程序一、 基于微分算子的边缘检测检测图像边缘信息,可以把图像看做曲面,边缘就是图像的变化最剧烈的位置。
这里所讲的边缘信息包含两个方面:一是边缘的具体位置,即像素的坐标;而是边缘的方向。
微分算子有两个重要性质:定域性(或局部性>、敏感性(或无界性>。
敏感性就是说,它对局部的函数值变化很敏感,但是因其对变化过于敏感又有了天然的缺陷——不能抵抗噪声。
局部性意思是指,每一点的导数只与函数在该点邻近的信息有关。
DXDiTa9E3d 主要有两大类基于微分算子的边缘检测技术:一阶微分算子边缘检测与二阶微分算子边缘检测。
这些检测技术采用以下的基本步骤:RTCrpUDGiT (1)将相应的微分算子简化为离散的差分格式,进而简化为模板(记为T>。
halcon边缘提取算子Halcon是一款高效的图像处理工具,它提供了丰富的算子,实现了常用的图像处理功能。
其中,边缘提取算子是常用的一种。
边缘提取算子的原理是根据图像中的像素灰度值的不同,确定边界处的像素,并将其结果输出。
下面,我们将围绕Halcon边缘提取算子展开阐述。
1.导入图像对于任意一种图像处理算法,首先要做的是导入待处理的图像。
我们可以使用Halcon的read_image命令,将图像文件导入到Halcon 中。
例如,我们可以使用如下代码读取一个名为“test.jpg”的图像:read_image(Image,'test.jpg')2.转换灰度图像省略转换成灰度图像的步骤,可直接使用边缘提取算子。
3.应用边缘提取算子Halcon提供了不同的边缘提取算子,如Sobel、Prewitt、Laplacian等。
其中,最常用的是Sobel算子。
我们可以使用Halcon的sobel_amp函数,对图像应用Sobel算子。
sobel_amp(Image,&Edges,3)其中,sobel_amp函数的第一个参数是需要进行边缘提取处理的图像,&Edges是输出的边缘图像。
第三个参数3表示使用一个大小为3的卷积核。
4.显示结果处理完成后,我们可以使用Halcon的dev_display函数,将图像输出到显示器上。
dev_display(Edges)至此,我们完成了边缘提取算子的全过程。
这是边缘提取算法用Halcon实现的一种流程,其中有不同的细节和技巧需要掌握。
但总的来说,边缘提取算法是实现大多数图像处理功能的重要基础之一。
总结:边缘提取算子是Halcon中的一个重要图像处理算法,其原理是根据图像中的像素灰度值的不同,确定边界处的像素,并将其结果输出。
实现该算法的步骤包括:导入图像、转换为灰度图像、应用边缘提取算子和显示结果。
了解并掌握该算法可以为进一步学习Halcon的图像处理算法打下坚实的基础。
毕业论文(设计)题目: 图像处理中的边缘提取算法及其实现原创性声明本人郑重声明:本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。
毕业论文中凡引用他人已经发表或未发表的成果、数据、观点等,均已明确注明出处。
除文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的科研成果。
对本文的研究成果做出重要贡献的个人和集体,均已在文中以明确方式标明。
本声明的法律责任由本人承担。
论文作者签名:日期:关于毕业论文使用授权的声明本人在指导老师指导下所完成的论文及相关的资料(包括图纸、试验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属XXX。
本人完全了解XXX有关保存、使用毕业论文的规定,同意学校保存或向国家有关部门或机构送交论文的纸质版和电子版,允许论文被查阅和借阅;本人授权XXX可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存和汇编本毕业论文。
如果发表相关成果,一定征得指导教师同意,且第一署名单位为XXX。
本人离校后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为XXX。
论文作者签名:日期:指导老师签名:日期:XXX本科毕业设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
图像的边缘提取专业:信息与计算科学班级:1001 姓名:何沛沛学号:201031101015一、摘要边缘提取,就是将图像中各种人物及物品的边缘的刻画出来,而其它的非边缘区域则用边缘区域的对比色进行填充。
让我们再把视线回到二维灰度值图上,很显然,如果把图像看成一个连续的曲面,那么在边缘处由于灰度值的剧烈变化,那么无疑,在边缘处像素点的导数(可以是关于x或y的一阶导数或关于x,y的二阶导数)必定要高过非边缘区域处的点。
而由于我们的图像是一个个像素点组成的,所以,用离散化的点的刻画不仅更为直接,而且要比连续的曲面处理方便不少。
这时,要做的只是将连续曲面上的导数进行离散化(将微分方程改写成差分方程)。
在边缘提取里,将这样的离散化,称作"算子"。
其中多为一阶算子及二阶算子算子。
在此选用Roberts算子配合图像细化,在其基础上做二值化设定一个阈值T,从多值的图像中直接提取目标物体。
接下来对图像进行边缘提取及外包得到主体部分的大致轮廓。
由于图像部分弱边缘的中断,最后进行图像的强弱边缘连接。
二、实验目的提取出人像的轮廓。
三、基本步骤:第一步:采用Roberts算子利用局部差分算子进行边缘检测,及边缘细化。
先获取图像宽高,数据再对图像数据与模板做卷积Convolution(float *fpData, float *fpKernel, float fCoef, int nSize, unsigned char *nResult)//对x分量作卷积Convolution(pGray, roberts_x, fTempC, nSize, &Data_x);//对y分量作卷积Convolution(pGray, roberts_y, fTempC, nSize, &Data_y);细化:roberts在图像边缘附近的区域内产生较宽的响应void CDipDoc::OnThining()左图为一阶微分算子,右图为二阶微分算子。
基于形态学的边缘特征提取算法基于形态学的边缘特征提取算法1. 引言边缘检测是计算机视觉领域中一个重要的任务,其在图像分割、目标识别和图像重建等领域具有广泛的应用。
而边缘特征提取算法作为边缘检测的关键环节之一,其目标是从图像中提取出能够准确反映目标边界的特征信息。
在这篇文章中,我们将探讨基于形态学的边缘特征提取算法,介绍其原理和算法流程,并分享我对这一主题的观点和理解。
2. 形态学基础形态学是一种基于图像形状和结构的数学理论,常用于图像处理和分析中。
形态学操作主要包括腐蚀(erosion)和膨胀(dilation)两种基本操作。
腐蚀操作可以将目标边界向内部腐蚀,而膨胀操作则相反,可以将目标边界向外扩展。
这两种操作的结合可以产生一系列形态学操作,如开操作、闭操作、形态学梯度等。
基于这些形态学操作,我们可以利用形态学算法来提取图像中感兴趣的边缘特征。
3. 基于形态学的边缘特征提取算法基于形态学的边缘特征提取算法主要分为两步:预处理和特征提取。
3.1 预处理在进行形态学边缘检测之前,我们需要进行一些预处理操作,以克服图像噪声对结果的影响。
常见的预处理方法包括图像平滑和二值化。
图像平滑可以通过应用高斯滤波或中值滤波等技术来减少图像中的噪声。
而二值化操作将图像转换为二值图像,将目标物体与背景分离出来,为后续的形态学操作做准备。
3.2 特征提取在预处理之后,我们可以开始进行形态学的边缘特征提取。
常用的形态学边缘特征提取算法包括基于腐蚀和膨胀操作的梯度算法、基于掩膜操作的边缘算子算法等。
3.2.1 基于腐蚀和膨胀操作的梯度算法该算法通过对原始图像进行腐蚀和膨胀操作,并计算两幅结果图像的差值,得到图像中的边缘特征。
具体步骤如下:1) 对原始图像进行腐蚀操作,得到腐蚀图像;2) 对原始图像进行膨胀操作,得到膨胀图像;3) 计算膨胀图像和腐蚀图像的差值,得到边缘特征图像。
3.2.2 基于掩膜操作的边缘算子算法该算法通过定义一种特殊的掩膜模板,对原始图像进行卷积操作,从而得到图像中的边缘特征。
Matlab实现:图像边缘提取1、边缘提取算法⽅法⼀:⼀阶微分算⼦Sobel算⼦Sobel算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好,Sobel算⼦对边缘定位不是很准确,图像的边缘不⽌⼀个像素。
Roberts算⼦Roberts算⼦检测⽅法对具有陡峭的低噪声的图像处理效果较好,但是利⽤roberts算⼦提取边缘的结果是边缘⽐较粗,因此边缘的定位不是很准确。
Prewitt算⼦Prewitt算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好。
但边缘较宽,⽽且间断点多。
Canny算⼦Canny算⼦是⽬前边缘检测最常⽤的算法,效果也是最理想的。
Canny⽅法不容易受噪声⼲扰,能够检测到真正的弱边缘。
优点在于,使⽤两种不同的阈值分别检测强边缘和弱边缘,并且当弱边缘和强边缘相连时,才将弱边缘包含在输出图像中。
⽅法⼆:⼆阶微分算⼦Laplacian算⼦Laplacian算⼦法对噪声⽐较敏感,所以很少⽤该算⼦检测边缘,⽽是⽤来判断边缘像素视为与图像的明区还是暗区。
2、实验结果分析⼀、边缘提取:Sobel算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好,sobel算⼦对边缘定位不是很准确,图像的边缘不⽌⼀个像素;Roberts算⼦检测⽅法对具有陡峭的低噪声的图像处理效果较好,但是利⽤roberts算⼦提取边缘的结果是边缘⽐较粗,因此边缘的定位不是很准确;Prewitt算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好。
但边缘较宽,⽽且间断点多;Laplacian算⼦法对噪声⽐较敏感,所以很少⽤该算⼦检测边缘,⽽是⽤来判断边缘像素视为与图像的明区还是暗区;Canny⽅法不容易受噪声⼲扰,能够检测到真正的弱边缘。
优点在于,使⽤两种不同的阈值分别检测强边缘和弱边缘,并且当弱边缘和强边缘相连时,才将弱边缘包含在输出图像中。
⼆、边缘复合增强Sobel、Robert、Prewitt算⼦的增强效果并不是很明显,尤其是Robert算⼦,因为它提取的边缘点过于稀疏和离散;Laplacian算⼦和canny算⼦的增强效果都⽐较理想,将边缘叠加上去后,整个⼿的轮廓和边缘都很清晰,直观上看,canny算⼦实现的效果⽐Laplacian算⼦好,最明显的地⽅就是⼿指尖的边缘。
图像边缘提取的经典算法及展望
摘要:该文对现有图像边缘提取的经典边缘检测算子方法进行了介绍,对比、分析了各自的优缺点,为了更清楚地看出各种算法的效果,给出了一些常用算法对同一幅标准测试图像的原图像进行边缘提取的实验结果。
最后,对图像边缘提取技术所面临的问题和发展方向阐述了自己的观点。
关键词:图像处理,边缘提取,边缘检测算子
中图分类号:TP 314.7 文献标识码:A
The Algorithm for I m age Edge Detection and Prospect
Abstract:The representative algorithms in these days for image edge detection have been presented in this paper.After contrasting and analyzing the advantages and the disadvantages of every algorithm.In order to have a much clearer look at the effect of every algorithm,we give the results of the experiments in which the common algorithms are used to detect image edge of the same standard testing image.At last,we bring forward our viewpoint about the problems the image edge detection technology is facing and where is its developmental direction .
Key words:Image manipulation ;Edge recognition ;Edge recognition arithmetic operators
1 选题背景与研究意义
图像是人们从客观世界获取信息的重要来源,也是人类视觉延伸的重要手段。
随着计算机和各个相关研究领域的迅速发展,科学计算的可视化、多媒体技术等研究与应用的兴起,数字图像处理从一个专门领域的学科,发展成为了一种新型的科学研究和人机界面的工具。
通过对人类视觉系统的研究表明,图像中的边界特别重要,往往仅凭一些粗略的轮廓线就能够识别出一个物体,而轮廓线就是图像的边缘。
图像的边缘是图像区域属性(像素灰度)发生明显变化的地方,也是图像信息最集中的地方,包含了图像的大部分特征信息,这些信息足图像识别中抽取特征的蕈要属性,能勾画出目标物体,是人类判别物体的重要依据。
因此,图像的边缘是图像的最基本特征,被应用到较高层次的特征描述、图像识别、图像分割、图像增强以及图像压缩等图像处理和分析技术中,同时边缘提取也作为图像分析与模式识别的主要特征提取手段,应用于计算机视觉、模式识别等研究领域中IlJ。
图像的边缘广泛存在于物体与背景之问、物体与物体之间,边缘检测的实质是采用某种算法提取出图像中对象与背景之间的交界线。
通过边缘检测,提取出边缘才能将目标和背景区分开来,简化图像分析,突出图像的重要特征,降低后继图像分析处理的数据量,使图像理解及识别更加容易和深刻。
因此,边缘提取算法是图像处理问题中经典技术之一,其优劣直接影响整个计算机视觉系统性能的好坏,它的解决对于我们进行高层次的图像特征描述、识别和理解等有着重大的影响。
在数字图像处理的研究过程中,图像的边缘提取一直以来都是图像处理与分析领域的研究热点,也一直是机器视觉研究领域中最活跃的课题之一,在工程应用中占有十分重要的地位。
因此,研究图像边缘提取方法具有重要的理论意义和现实意义。
具有重要的意义。
2 研究现状及发展趋势
图像边缘提取的方法多种多样,但由于其本所具有的难度和深度,研究没有很大的突破性进展,至目前还没有提出一种方法或是理论,能完美地解决边缘提取问题,这也促使研究人员对此问题不断深入研究。
同时,由于目前的边缘提取评价方法都存在很大的局限性,所以对图像边缘提取评价系统的研究得到越来越多的关注。
目前,用得较多的还是通过人眼进行主观判断,评价边缘提取方法的优劣。
总之,边缘提取算法主要存在两个问题:一是没有一种可以普遍使用的图像边缘提取算法;二是没有一个较好的通用的边缘提取的评价标准。
因此,这两个问题也将成为今后研究解决的重点和研究趋
势。
3几种常用边缘检测算子及检测效果
3.1 Roberts 边缘检测算子
Robert 边缘检测算子是一种利用局部差分算子寻找边缘的算子 。
()()()[]
()()[
]
2
1
22
1,1,1,1,,⎪⎭
⎪
⎬
⎫⎪⎩
⎪
⎨
⎧++-
+++-=y x f y x f y x f y x f y x g 其()y x f ,是具有整数像素坐标的输入图像,平方根使该处理类似于在人 类 视 觉 系 统 中.
3.2 Sobel 边缘检测算子
两个卷积形成Sobel 边缘检测算子(见表1),图像中每个像素都用这两个核作卷积,一个核对垂直边缘影响最大,另一个对水平边缘影响最大。
两个卷积的最大值作为该点的输出值。
表1 Sobel 边缘检测算子
3.3 Prewitt 边缘检测算子
两个卷积形成Prewitt 边缘检测算子(见表2) 图像中的每个像素都用这两个核作卷积,个核对垂直边缘影响最大,另一个对水平边缘影响最大。
两个卷积的最大值作为该点的输出值。
表2 Prewitt 边缘检测算子
3.4 Krisdl 边缘检测算子
8个卷积核形成了Kfisch 边缘检测算子(见表 3 ), 图像中的每个像素都用这8个掩模进行卷积,每个掩模都对某个特定边缘方向作出最大响应,所有 8 个方向的最大值作为该点的输出值。
最大响应掩模 的序号构成了边缘方向的编码 。
表3 Kfisch 边缘检测算子
3.5 Gauss-Laplace 边缘检测算子
拉普拉斯算子是对二维函数进行运算的二 阶 导数算子。
两个卷积形成了高斯一拉普拉斯边缘检测算子(见表 4 ) ,图像中的每个像素都用这两个核作卷积,两个卷积的最大值作为该点的输出值。
表4 高斯一拉普拉斯边缘检测算子
3.6以下边缘摄取算子提取图像边缘的结果对比
分别采用上述几种最常用的经典图像边缘提取算
子对某标准的原图像进行边缘特征提取,其结果如图 l 所示
图1几种边缘提取算子对某图片提取边缘的结果比较。
4 结论
该文对各种图像边缘提取算法的基本原理进行了较为详细的分析和阐述这对于从事数字图像处理领域工作者掌握图像边缘提取的有效方法,无疑是非常重要的。
就作者观察所及,如下诸问题的解决将为图像处理和边缘提取提供广阔的发展前景。
(1)实际图像中由于噪声等因素的影响,图像的质量会发生退化,对图像退化的机理、噪声性质以及如何准确建立原始图像的退化模型和有效进行图像复原等方面的研究,无疑将对图像信号的预处理提供了信息,有助于后续的边缘提取工作。
(2)传统的经典图像边缘提取算法,虽然效果不一定最好,但因其算法简单、成熟,计算量小,在经过一些改进之后,仍然有相当大的应用潜力。
参考文献:
[1] 张翔,刘媚,洁陈立伟.基于数学形态学的边缘提取算法
[J].电子科技大学学报,2002;(10)
[2] 何斌VisualC++数字图像处理[M].人民邮电出版社,
2001-5.
[3] 罗强,任庆利,杨万海.基于分形理论的图像边缘提取方
法们.通信学报.200l;(11)
[4] 孙即祥编著.数字图像处理f[M].河北教育出版社,1993
- 06.。