船舶设计原理重量与重心
- 格式:ppt
- 大小:698.00 KB
- 文档页数:20
112.8重力与浮力的平衡方法第二章船舶重量重心2.8 重力与浮力的平衡方法LW()DW()()+=∆x x x 一、问题的提出船舶在静水中的平衡条件要求然而,根据初选主尺度要素估算出来的船舶排水量和船舶重量,一般是不会相等的,即浮力和重力不平衡。
因此,需要通过调整来实现平衡。
[]TB WP L B D dC C C =x 式中,船舶表征向量2.8 重力与浮力的平衡方法一、问题的提出一般而言,假设重量的估算是正确的。
因为,即使重量的估算存在误差,但至少目前没有依据随意地修改重量估算的结果。
因此,我们可以通过调整主尺度来调整浮力,逐步实现重力和浮力的平衡。
那么,应该调整多少浮力是合适的,这是需要考虑的一个问题。
例如(1)DW=17,500吨=23,500∆吨任务书要求的载重量依据主尺度初估的排水量LW=6,500吨初估的空船重量+>(2)DW=17,500吨=24,000∆吨+>+500吨+X 吨总重量多500吨但是,仍然不平衡由此可见:排水量的增量应大于500吨。
但是大多少合理呢?为了回答上述问题,人们引入了诺曼系数(Normand)的概念。
2.8 重力与浮力的平衡方法一、问题的提出排水量:增加500吨空船重量:增加X 吨LW=6,500+X 吨吨诺曼系数定义为排水量变化与载重量变化的比值,即=DWN δδ∆二、诺曼系数2.8 重力与浮力的平衡方法式中,为诺曼系数为排水量的变化为载重量的变化N δ∆DW δ诺曼系数可以理解为排水量随载重量变化曲线的斜率。
LW+DW=DWH O M W W W ∆=+++船舶在静水中的平衡条件要求DW O H MW W W δδδδδ∂∂∂∆=∆+∆+∆+∂∆∂∆∂∆则排水量(Δ)的变化为2.8 重力与浮力的平衡方法二、诺曼系数H H W C α=∆OO W C β=∆MM W C γ=∆假设1()H H H H W C W C ααααα−∂∆=∆==∂∆∆∆1()O OO O W C W C βββββ−∂∆=∆==∂∆∆∆1()M MM M W C W C γγγγγ−∂∆=∆==∂∆∆∆则有2.8 重力与浮力的平衡方法二、诺曼系数DWO H MW W W δαδβδγδδ∆=∆+∆+∆+∆∆∆可得1DW1O H M W W W δδαβγ∆=−++ ∆∆∆1DW1OHM NW W W δδαβγ∆==−++ ∆∆∆诺曼系数N 具有下列性质二、诺曼系数●诺曼系数N >1;●诺曼系数N 的大小与空船重量占排水量的比例大小有关;●诺曼系数N 的数值依赖于空船重量的各项分量与排水量的关系;●当α=β=γ=1 时,诺曼系数与载重量系数互为倒数。
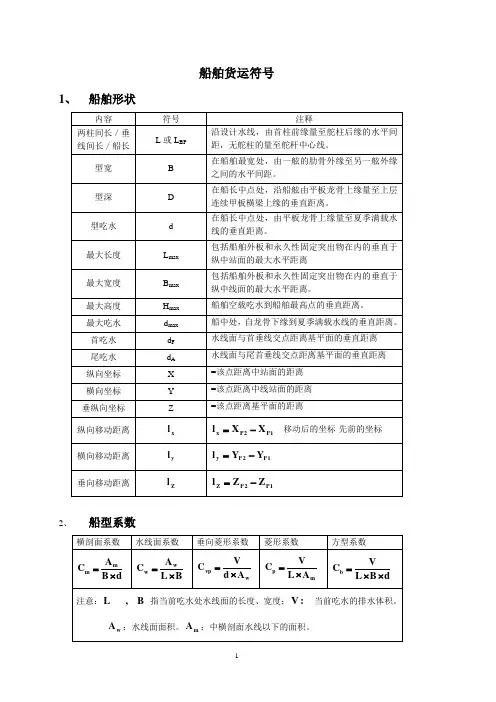
船舶货运符号1、船舶形状2、船型系数3、常用位置点3.其它4.稳性参数基本公式:第二章:近似算法梯形法 )2(00nni i y y y l A +-=∑= 辛一法 )4(31321y y y l A ++=辛二法 )33(834321y y y y l A +++=第三章:浮性1.重量、重心计算:i P D D ∑+=1 11)(1D M D X P X D X xp i g g i =⋅∑+⋅= 1)(1D Y P Y D Y i p i g g ⋅∑+⋅=11)(1D M D Z P Z D Z Zp i g g i =⋅∑+⋅=注意:利用合力矩定理,∑==n1i (力矩)分力对该轴或支点取的的力矩合力对某一支点或轴取其中:11g g 1g 1Z ,Y ,X ,∆为装卸后重量、重心。
g g g Z ,Y ,X ,∆为装卸前重量、重心,Pi Pi i P iZ ,Y ,X ,P ,为装卸货物重量、重心,装货为+,卸货为—x M :全船重量纵向力矩; Z M :全船重量的垂向力矩;2.少量装卸对吃水影响TPC100Pd P =δ W A TPC ρ01.0=其中:TPC -当前水域密度下的每厘米吃水吨数。
P -装卸货物重量,装货为+,卸货为—3.舷外水密度变化对船舶吃水的影响⎰=b aydxA⎪⎪⎭⎫ ⎝⎛-⨯=1100211ρρδρTPC Dd 其中: 1ρ-先前的水域密度;2ρ-后来的水域密度第四章 稳性1.初稳性高度定义式:g M Z Z GM -= M Z 根据型吃水查静水力资料,g Z 利用公式计算 2.船内垂移货物(初始正浮): Dpl GM M G z-=1 3.船内横移货物(初始正浮):GMD P tg y ⋅=θ4.自由液面的影响 Di GM M G xii ∑-=ρ1其中:自由液面修正量为 DiGMix i f∑=ρδx i -水线面的自由液面惯矩,对于矩形液面 3x lb 121i =对于等腰梯形液面)b b )(b b (481i 222121x ++=注意:GM 是指船舶装载与液体同重的固体时的初稳性高度,即没有考虑液体的流动性。
海洋工程船舶建造过程中的重量重心控制2中交海洋建设开发有限公司天津市 300453摘要:海洋工程船舶对于海洋油气资源开发而言是关键工程设备。
海洋工程船舶在具体建造过程中,管理环节最重要的一环就是控制重量重心,此环节也是考量船舶建造是否成功的一个重要指标。
对船舶进行设计、施工建造过程中,导致船舶重量重心发生变化的影响因素极多。
本文主要针对海洋工程的船舶建造进行分析,然后基于此,提出了一系列重量重心的控制措施,以供参考。
关键词:海洋工程;船舶建造;重量;重心;控制前言:由于海洋工程施工要求,海洋工程船舶在具体设计、建造过程中,会有诸多法律法规对其进行约束,还需要与指定的海洋工程项目有所关联。
具体开展设计建造作业时,不仅要思考船舶自身的合理性,又需要对船舶投入运行之后的适用性进行思考。
正是由于海洋工程船舶具备上述特殊性,空船的重量重心控制对于船舶设计建造而言至关重要,船舶重量变化对于船舶装载能力会起到直接影响。
因此,针对重量重心进行合理管控,可以增强船舶的稳定性以及优化船舶的主要功能。
1控制重量重心的意义对船舶重量重心进行控制,就是对空船的重量和重心进行控制,要求是在竣工状态之下空船重量低于设计重量的上限,但不可以无节制地降低,需要保证竣工状态之下空船重量保持在相关标准范围之内。
空船重量与变动重量二者之间呈现对立关系,空船重量一旦高于设计数值,变动重量极有可能无法达到标准数值。
以半潜运输船为例,在竣工状态下空船质量如果高于设计值标准,在具体航行运输时就无法到达指定的载重量。
竣工状态下的空船重量如果低于设计数值,那么在最大压载的水装载状态下,船舶无法下潜到最大深度。
另外,船舶自身重量变化,与船舶投资经济性能密切相关。
一般情况下,船舶设计、建造重点都在空船重量控制环节,但对于此环节的关注度却较低。
通常情况下认为,重心区域只会影响到船舶在运行中的稳定性,但实际却是,重心区域对于船舶的主要性能会起到直接影响。
1.试航航速V t:一般指满载试航速度,即主机在最大持续功率的情况下,静止在水中(不超过三级风二级浪)的新船满载试航所测得的速度。
服务航速V S 是指船平时营运时所使用的速度,一般是平均值。
2.续航力:一般指在规定的航速或主机功率情下,船上一次装足的燃料可供船连续航行的距离。
3.自持力:亦称自给力,指船上所带淡水和食品在海上所能维持的天数。
4.船级(船舶入级):是指新船准备入哪个船级社,要求取得什么船级标志,确定设计满足的规范。
5.积载因数C:对于干货船,通常用其表征货物所需的容积,即每吨货所要求的货舱容积数,单位是T/m 3。
6.船型:是指船的建筑特征,包括上层建筑形式,机舱位置,货舱划分,甲板层数,甲板间高等。
7.载重量系数ηDW=D W0/Δ0:它表示D W0占Δ0的百分数,对同样Δ的船来说,ηDW大者,L W小,表示其载重多。
而对同一使用任务要求,即D W和其他要求相同时,ηDW 大者,说明Δ小些也能满足要求。
8.平方模数法:假定W h比例于船体结构部件的总面积(用L,B,D 的某种组合)如W h=C h L(aB+bD)。
该方法对总纵强度问题不突出的的船,计算结果比较准确,适用于小船尤其是内河船。
9.立方模数法:假定W h比例于船的内部总体积(用LBD反映)则有W h=C h LBD。
该方法以船主体的内部体积为模数进行换算,C h值随L增加而减少的趋势比较稳定。
对大、中型船较为适用。
缺点:没有考虑船体的肥瘦程度,把LBD各要素对W h的影响看成是等同的。
10.诺曼系数N:错误!未找到引用源。
,表示的是增加1Tdw时船所要增加的1浮力。
11.载重型船:指船的载重量占船的排水量比例较大的船舶。
12.布置地位型船:又称容积型船,是指为布置各种用途的舱室,设备等需要较大的舱容及甲板面积的一类船舶。
13.失速:风浪失速是指船舶在海上航行,由于受风和浪的扰动,航行的速度较静水条件时的减少量,这种速度损失有时是相当大的。
船舶重量重心控制方案李群(福建省马尾造船股份有限公司,福建福州350501)摘要结合马尾船厂生产设计和建造过程,阐述了船舶重量重心控制方案,包括控制目标、各建造阶段控制措施、超差管理等内容,以及取得的业绩:对其它船厂在船舶建造过程中的重量重心控制有一定的借鉴意义。
关键词船舶设计建造;重量重心;控制目标;工作实施主流程;超差管理中图分类号:U671文献标识码:A文章编号:1672-4801(2020)05-066-04DOI:10.19508/ki.1672-4801.2020.05.022重量重心控制是船舶建造过程中的重要一环,并且贯穿从设计到建造乃至使用过程,控制住船舶重量重心意味着航速、稳性等总体性能设计指标的实现,是船舶交付验收的一项关键指标。
马尾船厂近年来建造了包括集装箱船、散货船、成品油船、拖船、远洋渔船以及高端海洋工程船等各类型船舶,具有丰富的船舶重量重心控制经验,形成了一套成熟的船舶重量重心控制方案。
1重量重心控制工作要求根据各类船型特点,为做好设计和建造阶段重量重心控制工作,船厂需要提前策划,成立重量重心控制工作组织管理机构,制定重量重心控制工作内容和流程,做好生产设计阶段重量重心对比分析和动态更新,做细做实钢板测厚、船体和设备称重,严格执行设备超差管理审批程序,定期进行月度及各建造阶段重量重心控制工作汇总和分析,按规程进行倾斜试验以检验重量控制效果等方面,确保船舶重量重心指标在允许的范围之内。
1.1控制目标根据船舶满载排水量,结合船厂在各型船舶重量重心控制工作的经验,设定的重量重心控制目标为:1)施工建造过程中重量裕度控制目标不大于施工设计阶段空船重量的2.5%。
2)满载排水量时横倾角不大于0.5°,无艏纵倾、艉纵倾不大于0.4%的设计水线长。
1.2空船重量空船重量包括以下项目:1)按照船舶技术规格书建造、装配完成的空船,但不包括消耗品和储藏品。
2)所有备件和备用设备。
船舶建造过程中重量重心控制方法摘要:为解决建造实船重量、重心与设计目标不符等问题,船舶建造中需进行重量、重心控制,而其中船舶总段重量、重心控制难度较大。
以船舶总段为对象,综合分析船舶轻量化因素,船舶重量中心的控制分为生产设计阶段的载荷控制以及建造阶段的重量控制。
在建造过程中的载荷称重也是重量中心控制的一项关键工作。
重量重心控制还需要造船厂提高认识加强管理。
关键词:船舶建造;重量重心;控制方法前言轻量化研究已从飞机、汽车领域拓展逐步至船舶领域,尤其是在海洋平台方面,轻量化作为一个重要的标准落实到设计和生产过程中。
在海洋平台建造中,生产设备重量变化是造成重量、重心误差的主要因素。
然而,船舶相比于海工,影响其重量、重心的因素却有很多。
1船舶轻量化建造船舶建造过程中的重量误差积累占导致重量和重心误差原因的很大一部分,尤其是艏艉端分段的重量对重心位置的影响最大。
大型船舶总段不便于称重,导致在建造过程中工程师对其重量、重心难以把握。
因此,控制好总段内每个小分段乃至构件的重量大小,分配好公差,是船舶轻量化建造以及重量、重心控制的重要手段之一,这也对建造者的管理能力提出巨大挑战。
船舶建造主要可以分以下几个阶段:构件阶段、组件阶段、分段阶段、总段阶段、超大总段阶段以及船体阶段。
为控制船舶总段乃至船体重量大小和重心位置,每个阶段都需统计信息。
构件称重方便,也最易统计,要想实现精细化造船,则应从构件阶段开始统计,随后依次上升,按照船舶各个阶段顺序进行管理。
重心位置可以以选件的安装线为基准,朝向船首为正,船尾为负。
在各个阶段,统计其阶段结构物的重量大小和重心位置,以设计时的编号为排序,依次排列收入数据库。
2船舶重量中心控制的两个阶段船舶建造是一个周期较长,技术复杂的过程,船舶建造过程中的重量重心控制要贯穿于船舶建造的过程之中,本文将船舶重量重心的控制分为两个阶段,分别是生产设计阶段的载荷控制、建造阶段的载荷控制。
2.1生产设计阶段的载荷控制生产设计阶段已经能够将全船的设备型号,管系、电缆布置走向等设计细节完成,换句话讲就是已经在电脑上将船舶造出来了。
船舶设计原理简答题1.进行完工设计的必要性,船舶设计的基本要求新船建成后,实际情况往往不可避免地会与原来的设计有所出入。
例如初步设计时,重量重心是估算的;建造时型线的修改、布局的局部变动;设备的变换和材料的代用。
从而使传播的重量重心、布置、结构以及性能等方面发生变化,因此要完工设计。
船舶设计的基本要求:适用经济,安全可靠,先进环保2.空船质量估算方法及影响钢料重量的因素估算方法:载重量系数法,百分数法,分项估算法重量因素:主尺度及方形系数,布置特征,使用要求,其他因素3.影响货仓舱容量的因素有哪些,为什么说增加型深D是增大货舱容积最有效的措施?影响货舱容量的因素:增加船长,增大舱容,但也相应增加船体钢料提高造价;增加船宽虽然能增加舱容,但对稳性有较大影响;缩小l F、l A及h d似乎能增加舱容,但规范对其有一定规定,且首尾尖瘦,对Vc影响不大;最大限度缩短l M是提高船舶经济性的措施之一;增加D和D/T是增大货舱容积最有效的措施。
因为对大船来说,增大D对强度有利,对钢料影响不大。
当然D增大,船的重心升高,受风面积加大对稳性有影响,但一般比较好解决。
4.设置压载水舱的必要性及其考虑空载返航过程中,由于油水和备品的消耗,船舶重心提高,导致初稳性高度降低;空载返航时,吃水太小,桨叶不能充分浸在水中,螺旋桨推进效率和推力就会减小,且由于桨叶交替变化而引起的桨叶严重震动;空载时,首吃水太小,船舶在海浪中易引起拍打和抨击,以致损坏首部结构;同时极度的尾倾会缩小驾驶视野,在横向风浪中给操舵增加困难。
5.δΔ试根据海军系数公式来推断排水量增加δΔ时,主机功率需要增加δP/P及δΔ/Δ的关系C=Δ^2/3V^3 P=Δ^2/3V^3P Cδp=2/3(Δ^2/3)*V^3 δΔ=2/3 δΔPΔPC ΔΔp=2/3 δΔΔ6.稳性高度满足上下限的必要性初稳性高下限是从保证安全和使用要求来考虑的,其最低限度必须满足法规对各种装载情况初稳性高的要求。
112.3船体钢料重量估算第二章船舶重量重心2.3 船体钢料重量估算民用船舶的船体钢料重量与空船重量之比在空船重量中,船体钢料重量所占比重较大。
同时,影响船体钢料重量的因素又较多。
因此,正确地分析各种影响因素,对准确估算船体钢料重量具有重要意义。
首尾柱及轴承包首柱尾柱轴承包舵踵……外板平板龙骨船底板舷侧板舭龙骨外板上的覆板……底板及舷侧构架底部纵(横)向构件舷侧纵(横)向构件首尾尖舱结构……甲板结构上甲板结构主甲板结构平台甲板结构……2.3 船体钢料重量估算一、船体钢料重量的分类细目舱壁及围壁纵(横)向水密舱壁部分舱壁及舱室圈壁舱口围壁围板……2.3 船体钢料重量估算一、船体钢料重量的分类细目支柱各层甲板下支柱舱面机械及梯口加强支柱……船体钢料杂项轴隧及推力轴承室钢质护舷材舱柜内制荡板及顶盖扶梯平台污水阱……焊接材料底座上层建筑钢料主机底座辅机底座锅炉底座轴承底座舱面机械底座……首楼桥楼尾楼各层甲板室舷墙……焊料、垫料……2.3 船体钢料重量估算二、船体钢料重量的影响因素(1)主尺度对船体钢料重量的影响对船体钢料重量的影响最大。
与船体钢料重量有密切关系,但其综合影响程度小于船长。
对舷侧和舱壁等结构构件有影响。
对局部强度有一定的影响,但其影响程度甚微。
对船体钢料重量的影响很小。
船长(L )船宽(B )型深(D )吃水(d )方形系数(C B )//(/)H W L t m /L m2.3 船体钢料重量估算二、船体钢料重量的影响因素(2)布置特征对船体钢料重量的影响甲板层数舱壁数上层建筑和甲板室布置决定的结构形式主要取决于使用要求和布置特点。
除了规范和法规中关于舱壁最小数目规定外,实际的舱壁数目还要考虑使用要求、分舱与破舱稳性以及结构强度。
它们的长度、宽度、高度、层数等主要根据所需布置地位和驾驶室高度而定。
对船体钢料重量的影响,小船比大船要大些,且不同的船舶类型(如客船与货船)有很大差别。
如货舱区是单壳体结构还是双壳体结构,双层底的范围和双层底高度等等。
2.4舾装重量估算2.4舾装重量估算民用船舶的舾装重量与空船重量之比舾装,包括甲板设备(也称为外舾装)和舱室内装(也称内舾装)。
从舾装重量占整个空船重量的比例来看,大型货船、大型油船相对较小;但小船,特别是渔船,所占比重较大。
舾装重量初估时不易准确。
因此,对舾装重量所占比例较大的船舶,舾装重量的估算要格外重视,否则影响很大。
一、舾装重量的分类细目舱底铺板舱边护条护舷木栏杆上木扶手木质上层建筑……船体木作船舶属具(金属)桅及龙门架柱栏杆扶梯旗杆外烟囱钢质舱口盖天窗门窗及人孔特种属具……船舶设备及装置舵装置锚装置系缆装置起货设备救生设备航行设备消防设备推进装置特种装置和设备……舾装木作非金属围壁衬板天花板室内地板门窗家具舷梯非金属舱口盖舾装木作杂项……2.4 舾装重量估算生活设备及工作用具厨房及餐室设备卫生及洗涤设备各种装饰、娱乐设备小卖部杂项设备医疗用具水手工具及备品木工工具及备品……敷料油漆舱底敷料舱柜敷料甲板敷料厨房瓷砖和地砖卫生间瓷砖和地砖……船体部分的油漆……一、舾装重量的分类细目2.4 舾装重量估算船舶管系冷藏及通风通风设备空调改备伙食冷藏库设备制冷机及其与冷藏舱或空调器连接管系冷藏货舱设备制冰设备……舱底水系统压载水系统消防系统卫生及日用水系统暖气设备测深管及注入管系统舱面机械系统航行设备系统特种机械系统货油装卸系统……二、舾装重量的分类特点舾装重量具有著显的两“繁”特点2.4 舾装重量估算这些特点,增加了舾装重量估算的难度。
一是,项目“繁多”二是,变化“频繁”且各自独立,规律性差;有些舾装件的型号、规格、技术参数等更新很快。
通常,将舾装重量归纳成四大类二、舾装重量的分类特点设备侧推2.4 舾装重量估算减摇舱口盖舱室设备锚舵系泊油漆2.4 舾装重量估算三、舾装重量的粗略估算同船体钢料重量的粗略估算一样,舾装重量的粗略估算既可利用母型船资料进行等比换算,也可利用统计公式进行估算。
平方模数法假设舾装重量(W O )比例于主船体的甲板面积。
第一章船舶设计概要1.船舶设计工作具有哪些特点?答:(1)必须贯彻系统工程的思想,考虑问题要全面,决策时要统筹兼顾;在总体设计中一定要处理好主要矛盾和次要矛盾的关系,要协调好各部门的工作,既要使船舶的各部分充分发挥自身功能,又要是相互关系达到最佳的配合。
(2)船舶设计的另一个特点是:设计工作是由粗到细、逐步近似、反复迭代完成的。
船舶设计也可以说是一个多参数、多目标、多约束的求解和优化问题。
2.船舶设计有哪些基本要求?(1)适用、经济(2)安全、可靠(3)先进、美观3.新船设计的基本依据是“设计技术任务书”,它反映了船东对新船的主要要求。
请问设计技术任务书通常是如何制定的?运输船舶的设计技术任务书一般包括哪些基本内容?答:(1)设计技术任务书是用船部门根据需要和可能,经船型的技术经济论证后得出的。
船型的技术经济论证是对不同船型方案的投资规模、经济效益和技术上的可行性进行比较和分析。
(2)一般运输船舶的设计技术任务书包括以下基本内容:1)航区和航线海船航区是根据航线离岸距离和风浪情况来划分的。
航区不同,对船舶的安全性和配备配置要求不同。
我国法规对非国际航行海船的航区划分为远海航区、近海航区、沿海航区、遮蔽航区。
内河船的航区根据不同水系或湖泊的风浪情况划分为A级、B级、C级等。
2)船型这里的船型是指船舶的类型、甲板层数、机舱部位、首尾形状和其他特征。
3)用途新船的使用要求,通常给出货运的货物种类和数量以及货物的理化性质和其他要求。
4)船籍和船级船级是指新船准备入哪个船级社,要求取得什么船级标志,确定设计应满足的规范。
船籍是指在哪国登记注册的船舶,确定新船应遵守的船籍国政府颁布的法定检验规则。
5)动力装置给出主机和发电机组的类型、台数、燃油品质和推进方式。
6)航速和功率储备对航速一般给出服务航速(kn,节,海里/小时)。
服务航速是指在一定的功率储备下新船满载能够达到的航速。
对拖船通常提出拖带航速下拖力的要求或自由航速的要求。