边长改正
- 格式:doc
- 大小:24.50 KB
- 文档页数:1
巷道测量巷道平面测量井下测量的主要对象是巷道,巷道测量和地面测量工作一样,应遵循“从高级到低级,从整体到局部”的原则。
巷道测量的主要任务是确定巷道、硐室及回采工作面的平面位置与高程, 为煤矿建设与生产提供数据与图纸资料。
井下巷道测量中的各项规定应按《煤矿测量试行规程》中的规定执行。
巷道平面测量概述井下巷道平面测量分为平面控制测量与碎部测量两部分。
井下巷道平面控制测量是从井底车场的起始边和起始点开始,在巷道内向井田边界布设导线。
起始边的方位角和起始点的坐标是通过平面联系测量确定的。
在一般矿井中,井下平面控制测量分为两类:一类导线精度较高,沿主要巷道(包括: 斜井、暗斜井、平硐、运输巷道、矿井总回风巷道、主要采区上、下山、石门等)布设,称为基本控制导线,按测角中误差,又分为 7"和 15"两级。
另一类导线精度较低,沿次要巷道布设,闭(附)合在基本控制导线上,作为采区巷道平面测量的控制,称为采区控制导线它分为15"和 30"两级。
在主要巷道中,为了配合巷道施工,一般应先布设 15"或 30"导线,用以指示巷道的掘进方向。
巷道每掘进 30~200m 时,测量人员应按该等级的导线要求进行导线测量。
完成外业工作后即进行内业计算,将计算结果展绘在采掘工程平面图上,供有关部门了解巷道掘进进度、方向、坡度等,以便作出正确的决策。
若测量人员填绘矿图之后,发现掘进工作面接近各种采矿安全边界,例如积水区、发火区、瓦斯突出区、采空区、巷道贯通相遇点以及重要采矿技术边界等,应立即以书面形式向矿领导和负责人报告,同时书面通知安全检查、施工区、队等有关部门,避免发生事故。
每当巷道掘进 300~800m 时,就应布设基本控制导线,并根据基本控制导线成果展绘基本矿图。
这样做,不仅可以起检核作用,而且能保证矿图的精度,提高巷道施工的质量。
由此可见,井下巷道平面控制测量的等级是根据井田范围的大小来决定的。


《大地测量学》试题参考答案一、名词解释:1、子午圈:过椭球面上一点的子午面同椭球面相截形成的闭合圈。
2、卯酉圈:过椭球面上一点的一个与该点子午面相垂直的法截面同椭球面相截形成的闭合的圈。
3、椭园偏心率:第一偏心率a ba e2 2-=第二偏心率b ba e2 2-='4、大地坐标系:以大地经度、大地纬度和大地高来表示点的位置的坐标系。
P35、空间坐标系:以椭球体中心为原点,起始子午面与赤道面交线为X轴,在赤道面上与X 轴正交的方向为Y轴,椭球体的旋转轴为Z轴,构成右手坐标系O-XYZ。
P46、法截线:过椭球面上一点的法线所作的法截面与椭球面相截形成圈。
P97、相对法截线:设在椭球面上任意取两点A和B,过A点的法线所作通过B点的法截线和过B点的法线所作通过A点的法截线,称为AB两点的相对法截线。
P158、大地线:椭球面上两点之间的最短线。
9、垂线偏差改正:将以垂线为依据的地面观测的水平方向观测值归算到以法线为依据的方向值应加的改正。
P1810、标高差改正:由于照准点高度而引起的方向偏差改正。
P19 11、截面差改正:将法截弧方向化为大地线方向所加的改正。
P2012、起始方位角的归算:将天文方位角以测站垂线为依据归算到椭球面以法线为依据的大地方位角。
P2213、勒让德尔定理:如果平面三角形和球面三角形对应边相等,则平面角等于对应球面角减去三分之一球面角超。
P2714、大地元素:椭球面上点的大地经度、大地纬度,两点之间的大地线长度及其正、反大地方位角。
P2815、大地主题解算:如果知道某些大地元素推求另外一些大地元素,这样的计算称为大地主题解算。
P2816、大地主题正算:已知P1点的大地坐标,P1至P2的大地线长及其大地方位角,计算P2点的大地坐标和大地线在P2点的反方位角。
17、大地主题反算:如果已知两点的大地坐标,计算期间的大地线长度及其正反方位角。
18、地图投影: 将椭球面上各个元素(包括坐标、方向和长度)按一定的数学法则投影到平面上。
精密导线测量边长改正高程归化投影改化(2011-07-30 23:03:29)转载▼标签:分类:工程测量精密导线测量边长改正杂谈整个地铁建设过程中,测量起到关键的作用,它相当于人的眼睛指引着开挖方向,测量方法与精度直接关系到隧道最终是否能够按照要求贯通。
地面控制网在整个测量过程起到框架作用,对精度要求高,工作量大,其中精密导线测量(包括近井导线测量)几乎贯穿于整个测量过程。
精密导线网边长应进行气象改正、仪器加(乘)常数改正、平距改正、边长的高程归化和投影改化。
1、气象改正,根据仪器提供的公式进行改正;也可以将气象数据输入全站仪内自动改正。
2、仪器加、乘常数改正值S,应按下式计算:式中:So——改正前的距离C——仪器加常数K——仪器乘常数3、利用垂直角计算水平距离D时应按下式计算:式中::垂直角观测值;K:大气折光系数;S:经气象改正、加(乘)常数改正后的斜距(m);R:地球平均曲率半径(m);f:地球曲率和大气折光对垂直角的修正量(");p:弧与度的换算常数,206265(")4、高程归化。
归化到城市轨道交通线路测区平均高程面上的测距边长度D,应按下式计算:式中::测距两端点平均高程面上的水平距离(m);Ra:参考椭球体在测距边方向法截弧的曲率半径(m);Hp:现有城市坐标系统投影面高程或城市轨道交通工程线路的平均高程(m);Hm:测距两端点的平均高程(m);地铁工程精密导线网高程归化的影响非常小,基本可以忽略不计...5、投影改化:测距边在高斯投影面上的长度Dz,按下式计算:式中:Ym:测距边两端点横坐标平均值(m);Rm:测距边中点的平均曲率半径(m);:测距边两端点近似横坐标的增量(m)这里要特别说明的是,上式中的Y值的几何意义是:该点到城市坐标系投影子午线的距离(并非是该点的城市坐标的Y值)。
这个距离可以用近似公式计算:Y=(赤道上一个经度所表示的长度)乘以(该点的经度与城市投影带子午线经度的差值)乘以(该点纬度的余弦值);这样计算有点麻烦,可以通过把该点的城市坐标的Y值减去相应的常数得到。
测距边长改正计算测距仪测距的过程中,由于受到仪器本身的系统误差以及外界环境影响,会造成测距精度的下降。
为了提高测距的精度,我们需要对测距的结果进行改正,可以分为三种类型的改正:仪器常数的改正、气象改正和倾斜改正。
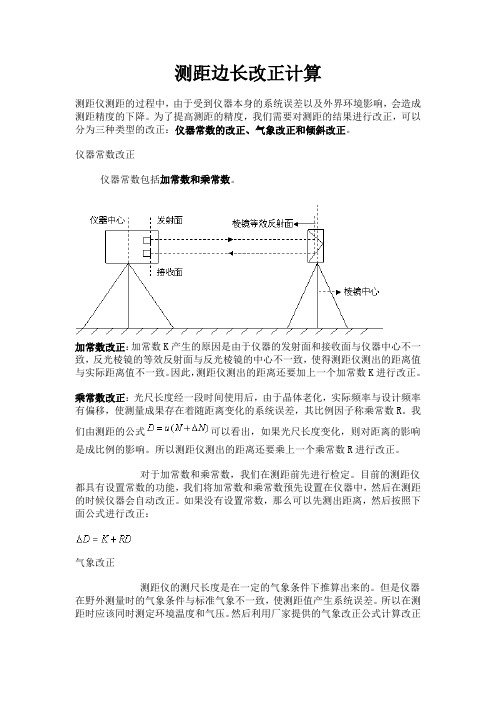
仪器常数改正仪器常数包括加常数和乘常数。
加常数改正:加常数K产生的原因是由于仪器的发射面和接收面与仪器中心不一致,反光棱镜的等效反射面与反光棱镜的中心不一致,使得测距仪测出的距离值与实际距离值不一致。
因此,测距仪测出的距离还要加上一个加常数K进行改正。
乘常数改正:光尺长度经一段时间使用后,由于晶体老化,实际频率与设计频率有偏移,使测量成果存在着随距离变化的系统误差,其比例因子称乘常数R。
我们由测距的公式可以看出,如果光尺长度变化,则对距离的影响是成比例的影响。
所以测距仪测出的距离还要乘上一个乘常数R进行改正。
对于加常数和乘常数,我们在测距前先进行检定。
目前的测距仪都具有设置常数的功能,我们将加常数和乘常数预先设置在仪器中,然后在测距的时候仪器会自动改正。
如果没有设置常数,那么可以先测出距离,然后按照下面公式进行改正:气象改正测距仪的测尺长度是在一定的气象条件下推算出来的。
但是仪器在野外测量时的气象条件与标准气象不一致,使测距值产生系统误差。
所以在测距时应该同时测定环境温度和气压。
然后利用厂家提供的气象改正公式计算改正值,或者根据厂家提供的对照表查找对应的改值。
对于有的仪器,可以将气压和温度输入到仪器中,由仪器自动改正。
倾斜改正由于测距仪测得的是斜距,应此将斜距换算成平距时还要进行倾斜改正。
目前的测距仪一般都与经纬仪组合,测距的同时可以测出竖直角α或天顶距z,然后按上面公式计算平距。
测距仪的标称精度测距误差可以分为两类:一类是与待测距离成比例的误差,如乘常数误差,温度和气压等外界环境引起的误差;另一类是与待测距离无关的误差,如加常数误差。
所以一般将测距仪的精度表达为下面两种形式:mD = ± (A+B·10-6 D) 或 mD= ± (A+B·ppm·)式中:A为固定误差,即测一次距离总会存在这么多的误差;B为比例误差系数,表示每测量一公里就会存在这么多误差。

矿井测量试题一、填空题:1、经纬仪导线一般有(闭合导线)、(附合导线)和(支导线)。
2、测量工作应遵循的原则是(从整体到局部)、(高级控制低级)。
3、“三下采煤”的“三下”是指(铁路下)、(水体下)、(建筑物下)。
4、井下导线点按照其用时间长短分(永久点)和(临时点)。
5、联系测量包括(平面联系测量)和(高程联系测量)6、贯通测量分:(一井内巷道贯通),(两井之间巷道贯通),(立井贯通)三种类型。
7、采用几何定向方法时,从近井点推算的两次独立定向结果的互差对两井和一井定向测量分别不得超过(1′)和(2′)。
8、矿井“三量”是指(开拓煤量)、(准备煤量)、(回采煤量)。
9、井下平面控制分为(基本控制)和(采区控制)两类,基本控制导线按测角精度分为(7″)和(15″)两级,采区控制导线按测角精度分为(15″)和(30″)两级。
10、延长导线之前,为了避免用错测点并检查测点有无移动,应对上一次导线的(最后一个水平角)及(边长)进行检查测量。
11、基本控制导线应每隔(300-500)米设立一组永久点,每组永久点不的少于( 3 )个。
12、经纬仪检较的内容有:(水准管轴)、(十字丝)、(视准轴)及(横轴)、(竖盘指标差)、(光学对点器)和(镜上中心)。
13、经过假想陀螺仪轴稳定位置与地轴的平面,称为(陀螺仪子午面),它与地面的交线称为(陀螺子午线)。
14、直线CD的坐标方位角为78°直线DE的象限角为北偏西15°,则CD与DE俩直线之间最小的水平角为(87°)。
15、观测水平角和竖直角时,用盘左、盘右观测的目的是为了消除(视准轴误差)、(横轴误差)、(仪器偏心误差)和(竖盘指标差)。
16、脉冲式光电测距是通过直接测定(光波)在测线上往返传播的(时间);而相位式光电测距是通过测量(调制光)在测线上往返传播所产生(相位移)间接测定(时间),在按求距公式算出距离。
17、当钢尺作精密量距时,一般对丈量结果应加(尺长)(温度)(拉力)改正,如果悬空丈量时加(垂曲)改正。
进行平差前要进行五项改正分别是:(1)加常数及乘常数改正(2)气象改正(3)倾斜改正(4)归算改正(5)投影改正全站仪测量时输入了温度气压,测出来的是平距,因此上述(2)、(3)项无需进行,但(1)、(4)、(5)项也必须进行改正后才能进行平差计算。
其计算公式见:边长改化是指将电子全站仪(或测距仪)测得的控制网中各边的斜距值归算到已知的坐标系统中,边长改化步骤是:测距仪加常数和乘常数改正——气象改正——倾斜改正——归算改正(归算至投影面)——投影改正。
(1)加常数及乘常数改正(3-1)式中:S为观测的斜距值,单位:米;K为测距仪的乘常数,单位:毫米/公里;C为测距仪的加常数,单位:米;S1为S经改正后的斜距值,单位:米。
公式中的数字是1000.0。
(2)气象改正(3-2)式中:K1、K2为测距仪的气象改正系数,可以从仪器说明书的气象改正公式中得到;P为气压,单位:mmHg;T为温度,单位:℃。
S1意义见公式(3-1);S2为S1经气象改正后的斜距值,单位:米。
(3)倾斜改正式中:V为天顶距;KK为大气折光系数;ρ=206265;R为地球曲率半径,单位:米;f为天顶距改正数,单位:秒;S2意义见公式(3-2);D0为倾斜改正后的水平距离,单位:米。
(4)归算改正(3-5)式中:H-为测区平均高程,单位:米;H0为投影面高程,单位:米;δh为大地水准面差距,单位:米;D1为平距D0归算至投影面上的长度,单位:米;D0意义见公式(3-4)。
(5)投影改正(3-6)式中:Y-为测区平距横坐标,单位:米;Y0为中央子午线横坐标,单位:米;R为地球曲率半径,单位:米;D1意义见公式(3-5),D2为经过归算和投影改正的平距,单位:米。
如果在网平差计算软件中已经考虑了边长的归算改正和投影改正,则控制网的平差输入文件中,边长观测值应使用只经过倾斜改正后的平距D0;反之,控制网的平差输入文件中,边长观测值应使用经过归算改正和投影改正的平距D2。
变形监测+数据整理+数据编制+科傻平差概述:(一)全站仪可以测斜距、平距、角度,普通工作在要求不高时,我们可以直接用平距,但是一旦涉及导线等精密测量时,“平距”必须通过别的渠道进行改正得到(斜距改平或边长改正)(二)当测量任务涉及到变形监测、导线网、多测回测角等精密测量时,不少测工受制于仪器、或者相关后处理软件的制约(如建策Dam6.0 徕卡三维变形软件)、其“数据整理归纳”和“斜距改平”的工作难以推进,困惑不前。
(三)本文主要交流探讨:①徕卡tca2003、tcr1201、tm30、tm50、ts15/16、ts60等徕卡测量机器人的非官方软件多测回测角测量的外业采集及数据后处理平差替代方法。
②普通1″仪器(特指:无马达、无自动照准、无多测回测角)的外业测量-原始数据—整理—编制—科傻平差的流程作业。
(四)本文是关于:徕卡测量机器人和普通仪器对精密测量外业数据作用于后期数据平差的探讨和交流,交流指正(如测距仪的气象改正系数K1、K2)(五)仪器架设为控制点上(不用设站)采用全圆观测方法, (非极坐标方法)进行数据采集(仪器架设A点以B为0方向,观测其余待监测点C1/C2/C3.再以B测站点以A为0方向,观测其余待监测点C1/C2/C3)外业上不带入任何坐标,只采集边角数据。
内业用A/B的已知坐标,加入气象等条件后,通过软件解算得出C1/C2/C3坐标,可先做A/B/D为高等级控制网、再测量时候把D也测进去,用于复核(网形图片参考附件五)关键:全圆观测、变形监测、导线、网平差、边坡监测、三角高程平差难点:多测回测角、斜距化平、边长改正要点:(一)精密测量都是mm级别范畴、需要严谨的态度对待(注意:仪器对中精度、量取精度、温度、干湿、气压、成像条件等)(二)对变形监测、导线网、三角高程的外业数据采集步骤要有大致了解(三)明白“多测回测角”对于工作的重要性(四)关于“斜距化平”的突破(五)常用到的参数(大气折光系数K、地球曲率R、仪器加(乘)常数、温度℃、气压Pa 等)①仪器加(乘)常数通过该台仪器的检定证书查看如(常数主要是对测距改正)(加常数:K=-1.38mm 乘常数:R=1.78mm/km )②更严谨的会涉及到激光的波长、及频率、周期等③测距仪气象改正系数K1,K2公式(请百度:查阅全站仪距离气象改正与推导)(六)针对从非自动仪器,下载出原始数据进行编制及—Cosa进行平差,我们得掌握Cosa 的高程in1、平面in2及其斜距化平.SV 文件的编写、明白其具体含义. (七)适合无马达、无ATR的普通全站仪外业采集数据—整理外业—编制cosa.SV文件进行后处理。
一、名词解释: 18、支水准路线:由一已知水准点出发,既不附合到其他水准点上,也不自行闭合,称为支水准路线。
40、坐标正算:根据已知点的坐标、已知边长及该边的坐标方位角,计算未知点的坐标,称为坐标的正算。
41、坐标反算:根据两个已知点的坐标求算两点间的边长及其方位角,称为坐标反算。
48、比例尺精度:通常人眼能在图上分辨出的最小距离为0.1mm。
因此,图上0.1mm所代表的实地水平距离称为比例尺精度,用ε表示。
52、等高距:相邻两条高程不同的等高线之间的高差,称为等高距。
53、等高线平距:相邻两条等高线之间的水平距离。
56、地性线:山脊线和山谷线统称为地性线。
57、鞍部:是相邻两山头之间呈马鞍形的低凹部位。
鞍部的等高线是由两组相对的山脊和山谷等高线组成,58、基本等高线:在同一幅地形图上,按基本等高距描绘的等高线,称为首曲线,又称基本等高线。
60、极坐标法:根据一个角度和一段距离测设点的平面位置。
此法适用于测设距离较短,且便于量距的情况。
二、填空题:2、确定地面点位的三项基本工作是_高差测量水平角测量水平距离测量5、经纬仪的安置主要包括对中与整平两项工作。
6、角度测量分水平角测量和竖直角测量。
7、水平角的观测常用的方法有测回法和方向观测法。
10、光学经纬仪主要由基座,照准部,度盘、三部分构成。
11、水平角的观测常用的方法有测回法和方向观测法。
12、高程测量可用水准测量三角高程测量气压高程测量等方法。
考过13、以坐标纵轴作为标准方向的称为坐标方位角。
16、精密量距时对距离进行尺长改正,是因为钢尺的名义长度与实际长度不相等而产生的。
24、地面上点的标志常用的有木桩和混凝土桩等。
25、水准测量的检核方法有测站检核和路线检核等。
26、平板仪的安置包括对中整平定向三项工作。
27、面积量算的方法有解析法和图解法。
28、距离丈量的方法有量距法和视距法。
29、比例尺的种类有数字比例尺和直线比例尺。
32、距离丈量的精度是用相对误差来衡量的。
边长改化
(1)加常数及乘常数改正
S1=S+(a+bS/1000)/1000
式中:S为观测的斜距值,m;b为测距仪的乘常数,ppm;a为测距仪的加常数,mm;S1为S经改正后的斜距值,m。
(2)气象改正
S2=S1+S1(3-2)
式中:K1、K2为测距仪的气象改正系数,可以从仪器说明书的气象改正公式中得到;P为气压,单位:mmHg;T为温度,单位:℃。
S1意义见公式(3-1);S2为S1经气象改正后的斜距值,单位:米。
(3)倾斜改正
f=S
2(1-K)ρ/(2R) D=S
2
sin(Z-f)
式中:Z为天顶距;K为大气折光系数;ρ=206265;R为地球曲率半径,m;f为天顶距改正数,s;D为倾斜改正后的水平距离,单位:m。
(4)归算改正
(3-5)
式中:为测区平均高程,单位:米;H0为投影面高程,单位:米;为大地水准面差距,单位:米;
D1为平距D0归算至投影面上的长度,单位:米;D0意义见公式(3-4)。
(5)投影改正
(3-6)
式中:为测区平距横坐标,单位:米;Y0为中央子午线横坐标,单位:米;R为地球曲率半径,单位:米;D1意义见公式(3-5),D2为经过归算和投影改正的平距,单位:米。