《机械设计基础》杨晓兰版 机械工业出版社 课后习题答案
- 格式:doc
- 大小:809.00 KB
- 文档页数:53
第11章 蜗杆传动11.1 蜗杆传动的特点及使用条件是什么?答:蜗杆传动的特点是:结构紧凑,传动比大。
一般在传递动力时,10~80i =;分度传动时只传递运动,i 可达1 000;传动平稳,无噪声;传动效率低;蜗轮一般用青铜制造,造价高;蜗杆传动可实现自锁。
使用条件:蜗杆传动用于空间交错(90)轴的传动。
用于传动比大,要求结构紧凑的传动,传递功率一般小于50kW 。
11.2 蜗杆传动的传动比如何计算?能否用分度圆直径之比表示传动比?为什么?答:蜗杆传动的传动比可用齿数的反比来计算,即1221i n n z z ==;不能用分度圆直径之比表示传动比,因为蜗杆的分度圆直径11d mq mz =≠。
11.3 与齿轮传动相比较,蜗杆传动的失效形式有何特点?为什么?答:蜗杆传动的失效形式与齿轮传动类似,有点蚀、弯曲折断、磨损及胶合。
但蜗杆传动中蜗轮轮齿的胶合、磨损要比齿轮传动严重得多。
这是因为蜗杆传动啮合齿面间的相对滑动速度大,发热严重,润滑油易变稀。
当散热不良时,闭式传动易发生胶合。
在开式传动及润滑油不清洁的闭式传动中,轮齿磨损较快。
11.4 何谓蜗杆传动的中间平面?中间平面上的参数在蜗杆传动中有何重要意义? 答:蜗杆传动的中间平面是通过蜗杆轴线且垂直于蜗轮轴线的平面。
中间平面上的参数是标准值,蜗杆传动的几何尺寸计算是在中间平面计算的。
在设计、制造中,皆以中间平面上的参数和尺寸为基准。
11.5 试述蜗杆直径系数的意义,为何要引入蜗杆直径系数q ?答:蜗杆直径系数的意义是:蜗杆的分度圆直径与模数的比值,即1q d m =。
引入蜗杆直径系数是为了减少滚刀的数量并有利于标准化。
对每个模数的蜗杆分度圆直径作了限制,规定了1~4个标准值,则蜗杆直径系数也就对应地有1~4个标准值。
11.6 何谓蜗杆传动的相对滑动速度?它对蜗杆传动有何影响?答:蜗杆传动的相对滑动速度是由于轴交角90∑=,蜗杆与蜗轮啮合传动时,在轮齿节点处,蜗杆的圆周速度1v 和蜗轮的圆周速度2v 也成90夹角,所以蜗杆与蜗轮啮合传动时,齿廓间沿蜗杆齿面螺旋线方向有较大的相对滑动速度s v ,其大小为s 1cos v v λ==。
机械设计基础第1章平面机构自由度习题解答之马矢奏春创作 时间:二O 二一年七月二十九日1-1至1-4 绘制机构运动简图.1-11-21-31-41-5至1-12 计算机构自由度1-5 有一处局部自由度(滚子),有一处虚约束(槽的一侧),无复合铰链n=6 PL=8 PH=1 F=3×6-2×8-1=11-6 有一处局部自由度(滚子),无复合铰链、虚约束n=8 PL=11 PH=1 F=3×8-2×11-1=11-7 无复合铰链、局部自由度、虚约束n=8 PL=11 PH=0 F=3×8-2×11-0=21-8 无复合铰链、局部自由度、虚约束n=6 PL=8 PH=1F=3×6-2×8-1=11-9 有两处虚约束(凸虚约束局部自由度 局部自由度轮、滚子处槽的一侧),局部自由度1处,无复合铰链n=4 PL=4 PH=2F=3×4-2×4-2=21-10 复合铰链、局部自由度、虚约束各有一处凸轮、齿轮为同一构件时,n=9 PL=12 PH=2F=3×9-2×12-2=1凸轮、齿轮为分歧构件时n=10 PL=13 PH=2 F=3×10-2×13-2=2 图上应在凸轮上加一个原动件.1-11 复合铰链一处,无局部自由度、虚约束n=4 PL=4 PH=2 F=3×4-2×4-2=21-12 复合铰链、局部自由度、虚约束各有一处n=8 PL=11 PH=1 F=3×8-2×11-1=1。
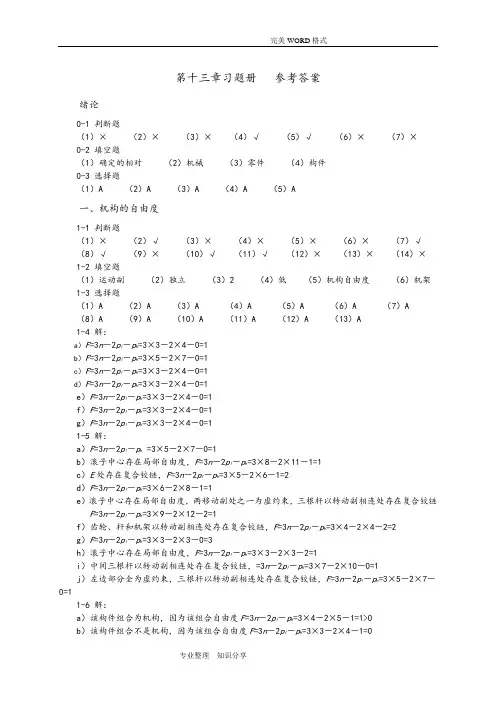
第十三章习题册参考答案绪论0-1 判断题(1)×(2)×(3)×(4)√(5)√(6)×(7)×0-2 填空题(1)确定的相对(2)机械(3)零件(4)构件0-3 选择题(1)A (2)A (3)A (4)A (5)A一、机构的自由度1-1 判断题(1)×(2)√(3)×(4)×(5)×(6)×(7)√(8)√(9)×(10)√(11)√(12)×(13)×(14)×1-2 填空题(1)运动副(2)独立(3)2 (4)低(5)机构自由度(6)机架1-3 选择题(1)A (2)A (3)A (4)A (5)A (6)A (7)A (8)A (9)A (10)A (11)A (12)A (13)A1-4 解:a)F=3n-2p l-p h=3×3-2×4-0=1b)F=3n-2p l-p h=3×5-2×7-0=1c)F=3n-2p l-p h=3×3-2×4-0=1d)F=3n-2p l-p h=3×3-2×4-0=1e)F=3n-2p l-p h=3×3-2×4-0=1f)F=3n-2p l-p h=3×3-2×4-0=1g)F=3n-2p l-p h=3×3-2×4-0=11-5 解:a)F=3n-2p l-p h =3×5-2×7-0=1b)滚子中心存在局部自由度,F=3n-2p l-p h=3×8-2×11-1=1c)E处存在复合铰链,F=3n-2p l-p h=3×5-2×6-1=2d)F=3n-2p l-p h=3×6-2×8-1=1e)滚子中心存在局部自由度,两移动副处之一为虚约束,三根杆以转动副相连处存在复合铰链F=3n-2p l-p h=3×9-2×12-2=1f)齿轮、杆和机架以转动副相连处存在复合铰链,F=3n-2p l-p h=3×4-2×4-2=2g)F=3n-2p l-p h=3×3-2×3-0=3h)滚子中心存在局部自由度,F=3n-2p l-p h=3×3-2×3-2=1i)中间三根杆以转动副相连处存在复合铰链,=3n-2p l-p h=3×7-2×10-0=1j)左边部分全为虚约束,三根杆以转动副相连处存在复合铰链,F=3n-2p l-p h=3×5-2×7-0=1 1-6 解:a)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×4-2×5-1=1>0b)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-1=0c)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×4-2×6-0=0d)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-0=1>0二、平面连杆机构2-1 判断题(1)×(2)×(3)√(4)×(5)√(6)×(7)√(8)√(9)√(10)×(11)×(12)√(13)×(14)×(15)√(16)×(17)×(18)√(19)×(20)√(21)×(22)×(23)×(24)×(25)√2-2 填空题(1)低(2)转动(3)3 (4)连杆,连架杆(5)曲柄,摇杆(6)最短(7)曲柄摇杆(8)摇杆,连杆(9)2 (10)>(11)运动不确定(12)非工作时间(13)惯性(14)大(15)中的摆动导杆机构有,中的转动导杆机构无(16)机架(17)曲柄(18)曲柄滑块(19)双摇杆(20)双曲柄机构(21)无,有2-3 选择题(1)A (2)C (3)B (4)A (5)B (6)B (7)A (8)C (9)A (10)A (11)A (12)C (13)C (14)A (15)A (16)A (17)A (18)A (19)A (20)A (21)A 2-4 解:a)双曲柄机构,因为40+110<70+90,满足杆长条件,并以最短杆为机架b)曲柄摇杆机构,因为30+130<110+120,满足杆长条件,并以最短杆的邻边为机架c)双摇杆机构,因为50+100>60+70,不满足杆长条件,无论以哪杆为机架都是双摇杆机构d)双摇杆机构,因为50+120=80+90,满足杆长条件,并以最短杆的对边为机架2-5 解:(1)由该机构各杆长度可得l AB+ l BC<l CD+ l AD,由此可知满足杆长条件,当以AB杆或AB杆的邻边为机架时该机构有曲柄存在(2)以l BC或l AD杆成为机架即为曲柄摇杆机构,以l AB杆成为机架即为双曲柄机构,以l CD杆成为机架即为双摇杆机构2-6 解:(1)曲柄摇杆机构由题意知连架杆CD杆不是最短杆,要为曲柄摇杆机构,连架杆AB杆应为最短杆(0<l AB≤300 mm)且应满足杆长条件l AB+l BC≤l CD+l AD,由此可得0<l AB≤150mm(2)双摇杆机构由题意知机架AD杆不是最短杆的对边,要为双摇杆机构应不满足杆长条件①AB杆为最短杆(0<l AB≤300mm)时,l AB+l BC>l CD+l AD,由此可得150mm<l AB≤300mm②AB杆为中间杆(300mm≤l AB≤500mm)时,l AD+l BC>l CD+l AB,由此可得300mm≤l AB<450mm③AB杆为最长杆(500mm≤l AB<1150mm)时,l AB+l AD>l CD+l BC,由此可得550mm<l AB<1150mm由此可知:150mm<l AB<450 mm,550mm<l AB<1150 mm(3)双曲柄机构要为双曲柄机构,AD杆必须为最短杆且应满足杆长条件①AB杆为中间杆(300mm≤l AB≤500mm)时,l AD+l BC≤l CD+ l AB,由此可得450mm≤l AB≤500mm②AB杆为最长杆(500mm≤l AB<1150mm)时,l AB+l AD≤l CD+l BC,由此可得500mm≤l AB≤550mm由此可知:450mm≤l AB≤550mm2-7 解:a)b)c)d)e)各机构压力角和传动角如图所示,图a)、d )机构无死点位置,图b)、c )、e )机构有死点位置 2-8 解:用作图法求解,主要步骤: (1)计算极位夹角:︒=+-⨯︒=+-⨯︒=3615.115.118011180K K θ (2)取比例尺μ=mm(3)根据比例尺和已知条件定出A 、D 、C 三点,如图所示(4)连接AC ,以AC 为边作角的另一角边线,与以D 为圆心、摇杆DC 为半径的圆弧相交于C 1和C 2点,连接DC 1和DC 2得摇杆的另一极限位置(两个)(5)从图中量得AC =71mm ,AC 1=26mm ,AC 2=170mm (6)当摇杆的另一极限位置位于DC 1时:5mm .2221=⨯=AC AC l AB -μ,5mm .4821=+⨯=AC AC l BC μ (7)当摇杆的另一极限位置位于DC 1时:5mm .4922=⨯=AC AC l AB -μ,5mm .12022=+⨯=AC AC l BC μ 答:曲柄和连杆的长度分别为、和、。
第十三章习题册参考答案绪论0-1 判断题(1)×(2)×(3)×(4)√(5)√(6)×(7)×0-2 填空题(1)确定的相对(2)机械(3)零件(4)构件0-3 选择题(1)A (2)A (3)A (4)A (5)A一、机构的自由度1-1 判断题(1)×(2)√(3)×(4)×(5)×(6)×(7)√(8)√(9)×(10)√(11)√(12)×(13)×(14)×1-2 填空题(1)运动副(2)独立(3)2 (4)低(5)机构自由度(6)机架1-3 选择题(1)A (2)A (3)A (4)A (5)A (6)A (7)A (8)A (9)A (10)A (11)A (12)A (13)A1-4 解:a)F=3n-2p l-p h=3×3-2×4-0=1b)F=3n-2p l-p h=3×5-2×7-0=1c)F=3n-2p l-p h=3×3-2×4-0=1d)F=3n-2p l-p h=3×3-2×4-0=1e)F=3n-2p l-p h=3×3-2×4-0=1f)F=3n-2p l-p h=3×3-2×4-0=1g)F=3n-2p l-p h=3×3-2×4-0=11-5 解:a)F=3n-2p l-p h =3×5-2×7-0=1b)滚子中心存在局部自由度,F=3n-2p l-p h=3×8-2×11-1=1c)E处存在复合铰链,F=3n-2p l-p h=3×5-2×6-1=2d)F=3n-2p l-p h=3×6-2×8-1=1e)滚子中心存在局部自由度,两移动副处之一为虚约束,三根杆以转动副相连处存在复合铰链F=3n-2p l-p h=3×9-2×12-2=1f)齿轮、杆和机架以转动副相连处存在复合铰链,F=3n-2p l-p h=3×4-2×4-2=2g)F=3n-2p l-p h=3×3-2×3-0=3h)滚子中心存在局部自由度,F=3n-2p l-p h=3×3-2×3-2=1i)中间三根杆以转动副相连处存在复合铰链,=3n-2p l-p h=3×7-2×10-0=1j)左边部分全为虚约束,三根杆以转动副相连处存在复合铰链,F=3n-2p l-p h=3×5-2×7-0=1 1-6 解:a)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×4-2×5-1=1>0b)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-1=0c)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×4-2×6-0=0d)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-0=1>0二、平面连杆机构2-1 判断题(1)×(2)×(3)√(4)×(5)√(6)×(7)√(8)√(9)√(10)×(11)×(12)√(13)×(14)×(15)√(16)×(17)×(18)√(19)×(20)√(21)×(22)×(23)×(24)×(25)√2-2 填空题(1)低(2)转动(3)3 (4)连杆,连架杆(5)曲柄,摇杆(6)最短(7)曲柄摇杆(8)摇杆,连杆(9)2 (10)>(11)运动不确定(12)非工作时间(13)惯性(14)大(15)中的摆动导杆机构有,中的转动导杆机构无(16)机架(17)曲柄(18)曲柄滑块(19)双摇杆(20)双曲柄机构(21)无,有2-3 选择题(1)A (2)C (3)B (4)A (5)B (6)B (7)A (8)C (9)A (10)A (11)A (12)C (13)C (14)A (15)A (16)A (17)A (18)A (19)A (20)A (21)A 2-4 解:a)双曲柄机构,因为40+110<70+90,满足杆长条件,并以最短杆为机架b)曲柄摇杆机构,因为30+130<110+120,满足杆长条件,并以最短杆的邻边为机架c)双摇杆机构,因为50+100>60+70,不满足杆长条件,无论以哪杆为机架都是双摇杆机构d)双摇杆机构,因为50+120=80+90,满足杆长条件,并以最短杆的对边为机架2-5 解:(1)由该机构各杆长度可得l AB+ l BC<l CD+ l AD,由此可知满足杆长条件,当以AB杆或AB杆的邻边为机架时该机构有曲柄存在(2)以l BC或l AD杆成为机架即为曲柄摇杆机构,以l AB杆成为机架即为双曲柄机构,以l CD杆成为机架即为双摇杆机构2-6 解:(1)曲柄摇杆机构由题意知连架杆CD杆不是最短杆,要为曲柄摇杆机构,连架杆AB杆应为最短杆(0<l AB≤300 mm)且应满足杆长条件l AB+l BC≤l CD+l AD,由此可得0<l AB≤150mm(2)双摇杆机构由题意知机架AD杆不是最短杆的对边,要为双摇杆机构应不满足杆长条件①AB杆为最短杆(0<l AB≤300mm)时,l AB+l BC>l CD+l AD,由此可得150mm<l AB≤300mm②AB杆为中间杆(300mm≤l AB≤500mm)时,l AD+l BC>l CD+l AB,由此可得300mm≤l AB<450mm③AB杆为最长杆(500mm≤l AB<1150mm)时,l AB+l AD>l CD+l BC,由此可得550mm<l AB<1150mm由此可知:150mm<l AB<450 mm,550mm<l AB<1150 mm(3)双曲柄机构要为双曲柄机构,AD杆必须为最短杆且应满足杆长条件①AB杆为中间杆(300mm≤l AB≤500mm)时,l AD+l BC≤l CD+ l AB,由此可得450mm≤l AB≤500mm②AB杆为最长杆(500mm≤l AB<1150mm)时,l AB+l AD≤l CD+l BC,由此可得500mm≤l AB≤550mm由此可知:450mm≤l AB≤550mm2-7 解:a )b )c )d )e ) 各机构压力角和传动角如图所示,图a)、d )机构无死点位置,图b)、c )、e )机构有死点位置 2-8 解:用作图法求解,主要步骤: (1)计算极位夹角:︒=+-⨯︒=+-⨯︒=3615.115.118011180K K θ (2)取比例尺μ=0.001m/mm(3)根据比例尺和已知条件定出A 、D 、C 三点,如图所示(4)连接AC ,以AC 为边作θ角的另一角边线,与以D 为圆心、摇杆DC 为半径的圆弧相交于C 1和C 2点,连接DC 1和DC 2得摇杆的另一极限位置(两个)(5)从图中量得AC =71mm ,AC 1=26mm ,AC 2=170mm (6)当摇杆的另一极限位置位于DC 1时:5mm .2221=⨯=AC AC l AB -μ,5mm .4821=+⨯=AC AC l BC μ (7)当摇杆的另一极限位置位于DC 1时:5mm .4922=⨯=AC AC l AB -μ,5mm .12022=+⨯=AC AC l BC μ 答:曲柄和连杆的长度分别为22.5mm 、48.5mm 和49.5mm 、120.5mm 。
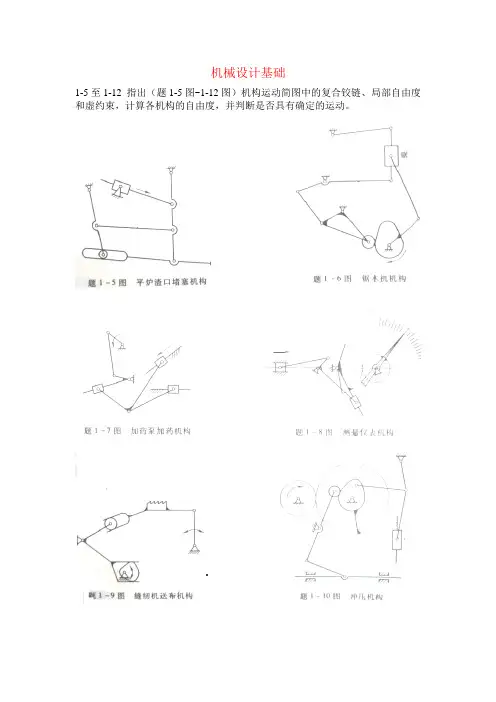
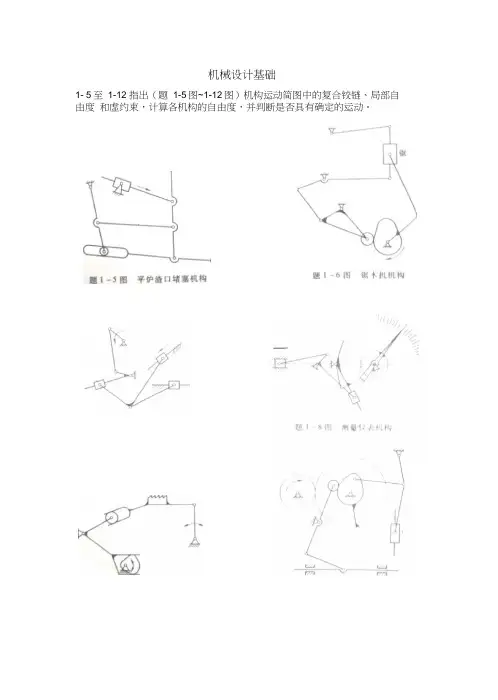
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=11-6 解F =H L P P n --23=111283-⨯-⨯=11-7 解F =H L P P n --23=011283-⨯-⨯=21-8 解F =H L P P n --23=18263-⨯-⨯=11-9 解F =H L P P n --23=24243-⨯-⨯=21-10 解F =H L P P n --23=212293-⨯-⨯=11-11 解F =H L P P n --23=24243-⨯-⨯=21-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动 10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
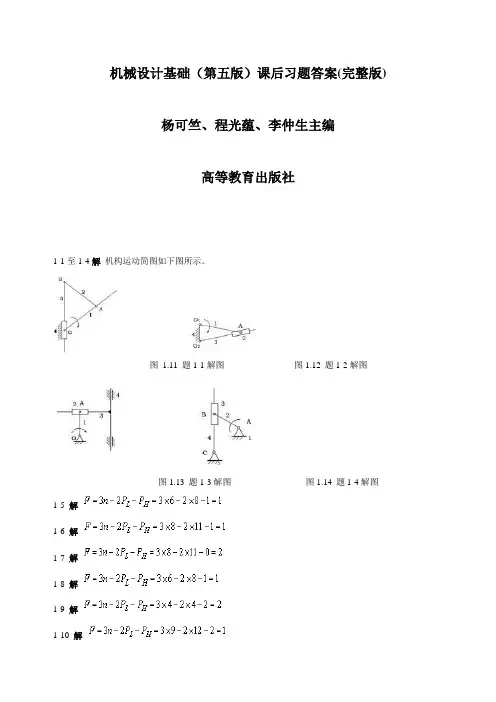
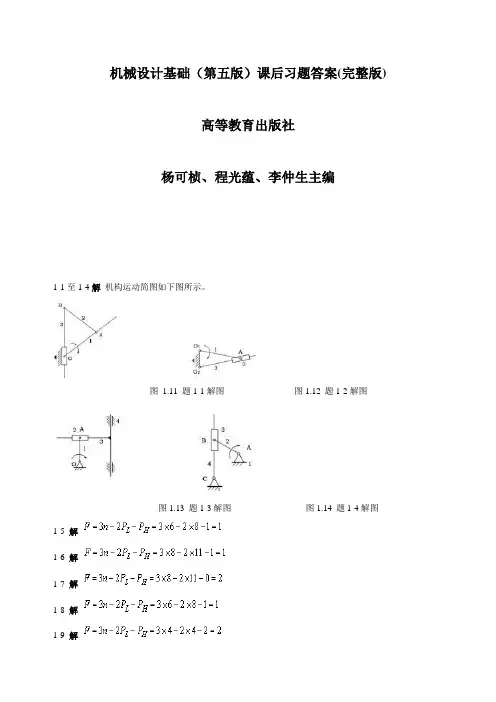
机械设计基础(第五版)课后习题答案(完整版)杨可竺、程光蕴、李仲生主编高等教育出版社1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定则解得故当齿数时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数,基圆小于齿根圆。
4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点正好在刀具的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图 4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段即为渐开线的法线。
根据渐开线的特性:渐开线的法线必与基圆相切,切点为。
课题:绪论目的任务:了解本课程研究对象、内容、增强感性认识重点:本课程研究对象、内容难点:机器与机构、构件与零件的区别教学方法:利用虚实陈列室、工程案例等多种教学软件,展示本门课研究的对象、内容。
绪论0.1 引言0.2 机械概述0.2.1 机器和机构在人们的生产和生活中广泛使用着各种机器。
机器的种类繁多,结构形式和用途也各不相同,但总的来说,机器有三个共同的特征:(1)都是人为的各种实物的组合;(2)组成机器的各种实物间具有确定的相对运动;(3)可代替或减轻人的劳动,完成有用的机械功或转换机械能。
点击下图可拆装运动演示运动演示动画演示动画演示机构是具有确定相对运动的各种实物的组合,它只符合机器的前两个特征。
(1)(2)0.2.2 零件和构件构件:运动的单元;拆装拆装零件:制造的单元。
0.2.3 机器的组成1 原动部分2 工作部分3 传动部分4 控制部分0.3 《机械设计基础》课程的性质、内容、任务和学习方法特点0.3.1《机械设计基础》课程的性质与研究对象《机械设计基础》是一门综合性技术基础课,其研究对象如下:第一篇构件静力分析研究对象为刚体或刚体系统,即忽略构件的变形,将构件视为在力作用下大小和形状不变的物体。
第二篇构件承载能力计算研究对象为变形固体。
具体地讲,是经过力学模型化处理的杆状构件。
第三篇常用机构研究对象为常见于各种机器中的机构。
如平面连杆机构,凸轮机构等。
第四篇常用机械传动研究对象为常见于各种机器中的机械传动。
如齿轮传动,带传动等。
第五篇通用机械零部件研究对象是在各种机器中普遍使用的零部件。
如轴、轴承、联轴器及离合器等。
0.3.2《机械设计基础》课程的内容第一篇构件静力分析 (理论力学)主要研究刚体在力作用下的平衡问题,即根据力系平衡条件分析平衡刚体的受力情况,确定各未知力的大小和方向,是构件承载能力计算的基础。
第二篇构件承载能力计算(材料力学)主要研究变形固体的强度和刚度问题,为机械零件确定合理的材料、截面形状和尺寸,为达到既安全又经济的目的提供理论基础。
《机械设计基础》课后习题答案第一篇:《机械设计基础》课后习题答案模块八一、填空1、带传动的失效形式有打滑和疲劳破坏。
2、传动带中的的工作应力包括拉应力、离心应力和弯曲应力。
3、单根V带在载荷平稳、包角为180°、且为特定带长的条件下所能传递的额定功率P0主要与带型号、小轮直径和小轮转速有关。
4、在设计V带传动时,V带的型号根据传递功率和小轮转速选取。
5、限制小带轮的最小直径是为了保证带中弯曲应力不致过大。
6、V带传动中,限制带的根数Z≤Zmax,是为了保证每根V带受力均匀(避免受力不均)。
7、V带传动中,带绕过主动轮时发生带滞后于带轮的弹性滑动。
8、带传动常见的张紧装置有定期张紧装置、自动张紧装置和张紧轮等几种。
9、V带两工作面的夹角θ为40°,V带轮的槽形角ϕ应小于θ角。
10、链传动和V带传动相比,在工况相同的条件下,作用在轴上的压轴力较小,其原因是链传动不需要初拉力。
11、链传动张紧的目的是调整松边链条的悬垂量。
采用张紧轮张紧时,张紧轮应布置在松边,靠近小轮,从外向里张紧。
二、选择1、平带、V带传动主要依靠(D)来传递运动和动力。
A.带的紧边拉力;B.带的松边拉力;C.带的预紧力;D.带和带轮接触面间的摩擦力。
2、在初拉力相同的条件下,V带比平带能传递较大的功率,是因为V带(C)。
A.强度高;B.尺寸小;C.有楔形增压作用;D.没有接头。
3、带传动正常工作时不能保证准确的传动比,是因为(D)。
A.带的材料不符合虎克定律;B.带容易变形和磨损;C.带在带轮上打滑;D.带的弹性滑动。
4、带传动在工作时产生弹性滑动,是因为(B)。
A.带的初拉力不够;B.带的紧边和松边拉力不等;C.带绕过带轮时有离心力;D.带和带轮间摩擦力不够。
5、带传动发生打滑总是(A)。
A.在小轮上先开始;B.在大轮上先开始;C.在两轮上同时开始;D不定在哪轮先开始。
6、带传动中,v1为主动轮的圆周速度,v2为从动轮的圆周速度,v为带速,这些速度之间存在的关系是(B)。
机械设计基础1- 5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解F =3n 2P L P H =3 6 2 8 1=11-6 解F =3n 2P L P H =3 8 2 11 1=11-7 解F =3n 2P L P H =3 8 2 11 0=21-8 解F =3n 2P L P H=3 6 2 8 1=11-9 解F =3n 2P L P H =3 4 2 4 2=21-10 解F =3n 2P L P H=3 9 2 12 2=11-11 解F =3n 2P L P H = 3 4 2 4 2 =21-12 解F =3n 2P L P H =3 3 2 3 0=32- 1 试根据题2-1 图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1 图答: a )40 110 150 70 90 160,且最短杆为机架,因此是双曲柄机构。
b )45 120 165 100 70 170,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )60 100 160 70 62 132 ,不满足杆长条件,因此是双摇杆机构。
d )50 100 150 100 90 190 ,且最短杆的对边为机架,因此是双摇杆机构。
2- 3 画出题2-3 图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
2- 5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5 图所示,要求踏板CD 在水平位置上下各摆10 度,且l CD 500mm ,l AD 1000mm 。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)'计算此机构的最小传动角。
题 2-5 图 解 : ( 1 )由题意踏板 CD 在水平位置上下摆动 10 ,就是曲柄摇杆机构中摇杆的极限位 置,此时曲柄与连杆处于两次共线位置。
第十三章习题册参考答案绪论0-1 判断题(1)×(2)×(3)×(4)√(5)√(6)×(7)×0-2 填空题(1)确定的相对(2)机械(3)零件(4)构件0-3 选择题(1)A (2)A (3)A (4)A (5)A一、机构的自由度1-1 判断题(1)×(2)√(3)×(4)×(5)×(6)×(7)√(8)√(9)×(10)√(11)√(12)×(13)×(14)×1-2 填空题(1)运动副(2)独立(3)2 (4)低(5)机构自由度(6)机架1-3 选择题(1)A (2)A (3)A (4)A (5)A (6)A (7)A(8)A (9)A (10)A (11)A (12)A (13)A1-4 解:a)F=3n-2p l-p h=3×3-2×4-0=1b)F=3n-2p l-p h=3×5-2×7-0=1c)F=3n-2p l-p h=3×3-2×4-0=1d)F=3n-2p l-p h=3×3-2×4-0=1e)F=3n-2p l-p h=3×3-2×4-0=1f)F=3n-2p l-p h=3×3-2×4-0=1g)F=3n-2p l-p h=3×3-2×4-0=11-5 解:a)F=3n-2p l-p h=3×5-2×7-0=1b)滚子中心存在局部自由度,F=3n-2p l-p h=3×8-2×11-1=1c)E处存在复合铰链,F=3n-2p l-p h=3×5-2×6-1=2d)F=3n-2p l-p h=3×6-2×8-1=1e)滚子中心存在局部自由度,两移动副处之一为虚约束,三根杆以转动副相连处存在复合铰链F=3n-2p l-p h=3×9-2×12-2=1f)齿轮、杆和机架以转动副相连处存在复合铰链,F=3n-2p l-p h=3×4-2×4-2=2g)F=3n-2p l-p h=3×3-2×3-0=3h)滚子中心存在局部自由度,F=3n-2p l-p h=3×3-2×3-2=1i)中间三根杆以转动副相连处存在复合铰链,=3n-2p l-p h=3×7-2×10-0=1j)左边部分全为虚约束,三根杆以转动副相连处存在复合铰链,F=3n-2p l-p h=3×5-2×7-0=11-6 解:a)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×4-2×5-1=1>0b)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-1=0c)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×4-2×6-0=0d)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-0=1>0二、平面连杆机构2-1 判断题(1)×(2)×(3)√(4)×(5)√(6)×(7)√(8)√(9)√(10)×(11)×(12)√(13)×(14)×(15)√(16)×(17)×(18)√(19)×(20)√(21)×(22)×(23)×(24)×(25)√2-2 填空题(1)低(2)转动(3)3 (4)连杆,连架杆(5)曲柄,摇杆(6)最短(7)曲柄摇杆(8)摇杆,连杆(9)2 (10)>(11)运动不确定(12)非工作时间(13)惯性(14)大(15)中的摆动导杆机构有,中的转动导杆机构无(16)机架(17)曲柄(18)曲柄滑块(19)双摇杆(20)双曲柄机构(21)无,有2-3 选择题(1)A (2)C (3)B (4)A (5)B (6)B (7)A(8)C (9)A (10)A (11)A (12)C (13)C (14)A(15)A (16)A (17)A (18)A (19)A (20)A (21)A2-4 解:a)双曲柄机构,因为40+110<70+90,满足杆长条件,并以最短杆为机架b)曲柄摇杆机构,因为30+130<110+120,满足杆长条件,并以最短杆的邻边为机架c)双摇杆机构,因为50+100>60+70,不满足杆长条件,无论以哪杆为机架都是双摇杆机构d)双摇杆机构,因为50+120=80+90,满足杆长条件,并以最短杆的对边为机架2-5 解:(1)由该机构各杆长度可得l AB+ l BC<l CD+ l AD,由此可知满足杆长条件,当以AB杆或AB杆的邻边为机架时该机构有曲柄存在(2)以l BC或l AD杆成为机架即为曲柄摇杆机构,以l AB杆成为机架即为双曲柄机构,以l CD杆成为机架即为双摇杆机构2-6 解:(1)曲柄摇杆机构由题意知连架杆CD杆不是最短杆,要为曲柄摇杆机构,连架杆AB杆应为最短杆(0<l AB≤300 mm)且应满足杆长条件l AB+l BC≤l CD+l AD,由此可得0<l AB≤150mm(2)双摇杆机构由题意知机架AD杆不是最短杆的对边,要为双摇杆机构应不满足杆长条件①AB杆为最短杆(0<l AB≤300mm)时,l AB+l BC>l CD+l AD,由此可得150mm<l AB≤300mm②AB杆为中间杆(300mm≤l AB≤500mm)时,l AD+l BC>l CD+l AB,由此可得300mm≤l AB<450mm③AB杆为最长杆(500mm≤l AB<1150mm)时,l AB+l AD>l CD+l BC,由此可得550mm<l AB<1150mm由此可知:150mm<l AB<450 mm,550mm<l AB<1150 mm(3)双曲柄机构要为双曲柄机构,AD杆必须为最短杆且应满足杆长条件①AB杆为中间杆(300mm≤l AB≤500mm)时,l AD+l BC≤l CD+ l AB,由此可得450mm≤l AB≤500mm②AB杆为最长杆(500mm≤l AB<1150mm)时,l AB+l AD≤l CD+l BC,由此可得500mm≤l AB≤550mm由此可知:450mm≤l AB≤550mm2-7 解:a )b )c )d )e ) 各机构压力角和传动角如图所示,图a)、d )机构无死点位置,图b)、c )、e )机构有死点位置 2-8 解:用作图法求解,主要步骤: (1)计算极位夹角:︒=+-⨯︒=+-⨯︒=3615.115.118011180K K θ (2)取比例尺μ=0.001m/mm(3)根据比例尺和已知条件定出A 、D 、C 三点,如图所示(4)连接AC ,以AC 为边作θ角的另一角边线,与以D 为圆心、摇杆DC 为半径的圆弧相交于C 1和C 2点,连接DC 1和DC 2得摇杆的另一极限位置(两个)(5)从图中量得AC =71mm ,AC 1=26mm ,AC 2=170mm (6)当摇杆的另一极限位置位于DC 1时:5mm .2221=⨯=AC AC l AB -μ,5mm .4821=+⨯=AC AC l BC μ (7)当摇杆的另一极限位置位于DC 1时:5mm .4922=⨯=AC AC l AB -μ,5mm .12022=+⨯=AC AC l BC μ 答:曲柄和连杆的长度分别为22.5mm 、48.5mm 和49.5mm 、120.5mm 。
《机械设计基础》课后习题答案一、填空1、带传动的失效形式有打滑和疲劳破坏。
2、传动带中的的工作应力包括拉应力、离心应力和弯曲应力。
3、单根V带在载荷平稳、包角为180、且为特定带长的条件下所能传递的额定功率P0主要与带型号、小轮直径和小轮转速有关。
4、在设计V带传动时,V带的型号根据传递功率和小轮转速选取。
5、限制小带轮的最小直径是为了保证带中弯曲应力不致过大。
6、V带传动中,限制带的根数Z≤Zmax,是为了保证每根V 带受力均匀(避免受力不均)。
7、V带传动中,带绕过主动轮时发生带滞后于带轮的弹性滑动。
8、带传动常见的张紧装置有定期张紧装置、自动张紧装置和张紧轮等几种。
9、V带两工作面的夹角为40,V带轮的槽形角应小于角。
10、链传动和V带传动相比,在工况相同的条件下,作用在轴上的压轴力较小,其原因是链传动不需要初拉力。
11、链传动张紧的目的是调整松边链条的悬垂量。
采用张紧轮张紧时,张紧轮应布置在松边,靠近小轮,从外向里张紧。
二、选择1、平带、V带传动主要依靠(D)来传递运动和动力。
A.带的紧边拉力;B.带的松边拉力;C.带的预紧力;D.带和带轮接触面间的摩擦力。
2、在初拉力相同的条件下,V带比平带能传递较大的功率,是因为V带(C)。
A.强度高;B.尺寸小;C.有楔形增压作用;D.没有接头。
3、带传动正常工作时不能保证准确的传动比,是因为(D)。
A.带的材料不符合虎克定律;B.带容易变形和磨损;C.带在带轮上打滑;D.带的弹性滑动。
4、带传动在工作时产生弹性滑动,是因为(B)。
A.带的初拉力不够;B.带的紧边和松边拉力不等;C.带绕过带轮时有离心力;D.带和带轮间摩擦力不够。
5、带传动发生打滑总是(A)。
A.在小轮上先开始;B.在大轮上先开始;C.在两轮上同时开始;D不定在哪轮先开始。
6、带传动中,v1为主动轮的圆周速度,v2为从动轮的圆周速度,v为带速,这些速度之间存在的关系是(B)。
A.v1 = v2 = v;B.v1 >v>v2;C.v1<v< v2;D.v1 = v> v2。
第十三章习题册参考答案绪论0-1 判断题(1)×(2)×(3)×(4)√(5)√(6)×(7)×0-2 填空题(1)确定的相对(2)机械(3)零件(4)构件0-3 选择题(1)A (2)A (3)A (4)A (5)A一、机构的自由度1-1 判断题(1)×(2)√(3)×(4)×(5)×(6)×(7)√(8)√(9)×(10)√(11)√(12)×(13)×(14)×1-2 填空题(1)运动副(2)独立(3)2 (4)低(5)机构自由度(6)机架1-3 选择题(1)A (2)A (3)A (4)A (5)A (6)A (7)A(8)A (9)A (10)A (11)A (12)A (13)A1-4 解:a)F=3n-2p l-p h=3×3-2×4-0=1b)F=3n-2p l-p h=3×5-2×7-0=1c)F=3n-2p l-p h=3×3-2×4-0=1d)F=3n-2p l-p h=3×3-2×4-0=1e)F=3n-2p l-p h=3×3-2×4-0=1f)F=3n-2p l-p h=3×3-2×4-0=1g)F=3n-2p l-p h=3×3-2×4-0=11-5 解:a)F=3n-2p l-p h =3×5-2×7-0=1b)滚子中心存在局部自由度,F=3n-2p l-p h=3×8-2×11-1=1c)E处存在复合铰链,F=3n-2p l-p h=3×5-2×6-1=2d)F=3n-2p l-p h=3×6-2×8-1=1e)滚子中心存在局部自由度,两移动副处之一为虚约束,三根杆以转动副相连处存在复合铰链F=3n-2p-p h=3×9-2×12-2=1lf)齿轮、杆和机架以转动副相连处存在复合铰链,F=3n-2p l-p h=3×4-2×4-2=2 g)F=3n-2p l-p h=3×3-2×3-0=3h)滚子中心存在局部自由度,F=3n-2p l-p h=3×3-2×3-2=1i)中间三根杆以转动副相连处存在复合铰链,=3n-2p l-p h=3×7-2×10-0=1j)左边部分全为虚约束,三根杆以转动副相连处存在复合铰链,F=3n-2p l-p h=3×5-2×7-0=11-6 解:a)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×4-2×5-1=1>0b)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-1=0c)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×4-2×6-0=0d)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-0=1>0二、平面连杆机构2-1 判断题(1)×(2)×(3)√(4)×(5)√(6)×(7)(8)√(9)√(10)×(11)×(12)√(13)×(14)×(15)√(16)×(17)×(18)√(19)×(20)√(21)×(22)×(23)×(24)×(25)√2-2 填空题(1)低(2)转动(3)3 (4)连杆,连架杆(5)曲柄,摇杆(6)最短(7)曲柄摇杆(8)摇杆,连杆(9)2 (10)>(11)运动不确定(12)非工作时间(13)惯性(14)大(15)中的摆动导杆机构有,中的转动导杆机构无(16)机架(17)曲柄(18)曲柄滑块(19)双摇杆(20)双曲柄机构(21)无,有2-3 选择题(1)A (2)C (3)B (4)A (5)B (6)B (7)A(8)C (9)A (10)A (11)A (12)C (13)C (14)A(15)A (16)A (17)A (18)A (19)A (20)A (21)2-4 解:a)双曲柄机构,因为40+110<70+90,满足杆长条件,并以最短杆为机架b)曲柄摇杆机构,因为30+130<110+120,满足杆长条件,并以最短杆的邻边为机架c)双摇杆机构,因为50+100>60+70,不满足杆长条件,无论以哪杆为机架都是双摇杆机构d)双摇杆机构,因为50+120=80+90,满足杆长条件,并以最短杆的对边为机架2-5 解:(1)由该机构各杆长度可得l AB+ l BC<l CD+ l AD,由此可知满足杆长条件,当以AB杆或AB杆的邻边为机架时该机构有曲柄存在(2)以l BC或l AD杆成为机架即为曲柄摇杆机构,以l AB杆成为机架即为双曲柄机构,以l杆成为机架即为双摇杆机构CD2-6 解:(1)曲柄摇杆机构由题意知连架杆CD杆不是最短杆,要为曲柄摇杆机构,连架杆AB杆应为最短杆(0<l AB ≤300 mm)且应满足杆长条件l AB+l BC≤l CD+l AD,由此可得0<l AB≤150mm(2)双摇杆机构由题意知机架AD杆不是最短杆的对边,要为双摇杆机构应不满足杆长条件①AB 杆为最短杆(0<l AB ≤300mm )时,l AB +l BC >l CD +l AD ,由此可得150mm<l AB ≤300mm ②AB 杆为中间杆(300mm ≤l AB ≤500mm )时,l AD +l BC >l CD +l AB ,由此可得300mm ≤l AB <450mm ③AB 杆为最长杆(500mm ≤l AB <1150mm )时,l AB +l AD >l CD +l BC ,由此可得550mm<l AB <1150mm 由此可知:150mm<l AB <450 mm ,550mm<l AB <1150 mm(3)双曲柄机构要为双曲柄机构,AD 杆必须为最短杆且应满足杆长条件①AB 杆为中间杆(300mm ≤l AB ≤500mm )时,l AD +l BC ≤l CD + l AB ,由此可得450mm ≤l AB ≤500mm ②AB 杆为最长杆(500mm ≤l AB <1150mm )时,l AB +l AD ≤l CD +l BC ,由此可得500mm ≤l AB ≤550mm 由此可知:450mm ≤l AB ≤550mm 2-7 解:a )b )c )d )e )各机构压力角和传动角如图所示,图a)、d )机构无死点位置,图b)、c )、e )机构有死点位置2-8 解:用作图法求解,主要步骤:(1)计算极位夹角:︒=+-⨯︒=+-⨯︒=3615.115.118011180K K θ(2)取比例尺μ=0.001m/mm(3)根据比例尺和已知条件定出A 、D 、C 三点,如图所示(4)连接AC ,以AC 为边作?角的另一角边线,与以D 为圆心、摇杆DC 为半径的圆弧相交于C 1和C 2点,连接DC 1和DC 2得摇杆的另一极限位置(两个)(5)从图中量得AC =71mm ,AC 1=26mm ,AC 2=170mm (6)当摇杆的另一极限位置位于DC 1时:5mm .2221=⨯=AC AC l AB -μ,5mm .4821=+⨯=AC AC l BC μ (7)当摇杆的另一极限位置位于DC 1时:5mm .4922=⨯=AC AC l AB -μ,5mm .12022=+⨯=AC AC l BC μ 答:曲柄和连杆的长度分别为22.5mm 、48.5mm 和49.5mm 、120.5mm 。
第十三章习题册参考答案绪论0-1 判断题(1)×(2)×(3)×(4)√(5)√(6)×(7)×0-2 填空题(1)确定的相对(2)机械(3)零件(4)构件0-3 选择题(1)A (2)A (3)A (4)A (5)A一、机构的自由度1-1 判断题(1)×(2)√(3)×(4)×(5)×(6)×(7)√(8)√(9)×(10)√(11)√(12)×(13)×(14)×1-2 填空题(1)运动副(2)独立(3)2 (4)低(5)机构自由度(6)机架1-3 选择题(1)A (2)A (3)A (4)A (5)A (6)A (7)A(8)A (9)A (10)A (11)A (12)A (13)A 1-4 解:a)F=3n-2p l-p h=3×3-2×4-0=1b)F=3n-2p l-p h=3×5-2×7-0=1c)F=3n-2p l-p h=3×3-2×4-0=1d)F=3n-2p l-p h=3×3-2×4-0=1e)F=3n-2p l-p h=3×3-2×4-0=1f)F=3n-2p l-p h=3×3-2×4-0=1g)F=3n-2p l-p h=3×3-2×4-0=11-5 解:a)F=3n-2p l-p h =3×5-2×7-0=1b)滚子中心存在局部自由度,F=3n-2p l-p h=3×8-2×11-1=1c)E处存在复合铰链,F=3n-2p l-p h=3×5-2×6-1=2d)F=3n-2p l-p h=3×6-2×8-1=1e)滚子中心存在局部自由度,两移动副处之一为虚约束,三根杆以转动副相连处存在复合铰链F=3n-2p l-p h=3×9-2×12-2=1f)齿轮、杆和机架以转动副相连处存在复合铰链,F=3n-2p l-p h=3×4-2×4-2=2g)F=3n-2p l-p h=3×3-2×3-0=3h)滚子中心存在局部自由度,F=3n-2p l-p h=3×3-2×3-2=1i)中间三根杆以转动副相连处存在复合铰链,=3n-2p l-p h=3×7-2×10-0=1j)左边部分全为虚约束,三根杆以转动副相连处存在复合铰链,F=3n-2p l -p h=3×5-2×7-0=11-6 解:a)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×4-2×5-1=1>0b)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-1=0c)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×4-2×6-0=0d)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-0=1>0二、平面连杆机构2-1 判断题(1)×(2)×(3)√(4)×(5)√(6)×(7)√(8)√(9)√(10)×(11)×(12)√(13)×(14)×(15)√(16)×(17)×(18)√(19)×(20)√(21)×(22)×(23)×(24)×(25)√2-2 填空题(1)低(2)转动(3)3 (4)连杆,连架杆(5)曲柄,摇杆(6)最短(7)曲柄摇杆(8)摇杆,连杆(9)2 (10)>(11)运动不确定(12)非工作时间(13)惯性(14)大(15)中的摆动导杆机构有,中的转动导杆机构无(16)机架(17)曲柄(18)曲柄滑块(19)双摇杆(20)双曲柄机构(21)无,有2-3 选择题(1)A (2)C (3)B (4)A (5)B (6)B (7)A(8)C (9)A (10)A (11)A (12)C (13)C (14)A(15)A (16)A (17)A (18)A (19)A (20)A (21)A2-4 解:a)双曲柄机构,因为40+110<70+90,满足杆长条件,并以最短杆为机架b)曲柄摇杆机构,因为30+130<110+120,满足杆长条件,并以最短杆的邻边为机架c)双摇杆机构,因为50+100>60+70,不满足杆长条件,无论以哪杆为机架都是双摇杆机构d)双摇杆机构,因为50+120=80+90,满足杆长条件,并以最短杆的对边为机架2-5 解:(1)由该机构各杆长度可得l AB+l BC<l CD+l AD,由此可知满足杆长条件,当以AB杆或AB杆的邻边为机架时该机构有曲柄存在(2)以l BC或l AD杆成为机架即为曲柄摇杆机构,以l AB杆成为机架即为双曲柄机构,以l CD杆成为机架即为双摇杆机构2-6 解:(1)曲柄摇杆机构由题意知连架杆CD杆不是最短杆,要为曲柄摇杆机构,连架杆AB杆应为最短杆(0<l AB≤300 mm)且应满足杆长条件l AB+l BC≤l CD+l AD,由此可得0<l AB≤150mm (2)双摇杆机构由题意知机架AD杆不是最短杆的对边,要为双摇杆机构应不满足杆长条件①AB杆为最短杆(0<l AB≤300mm)时,l AB+l BC>l CD+l AD,由此可得150mm<l AB≤300mm②AB杆为中间杆(300mm≤l AB≤500mm)时,l AD+l BC>l CD+l AB,由此可得300mm ≤l AB<450mm③AB杆为最长杆(500mm≤l AB<1150mm)时,l AB+l AD>l CD+l BC,由此可得550mm<l AB<1150mm由此可知:150mm<l AB<450 mm,550mm<l AB<1150 mm(3)双曲柄机构要为双曲柄机构,AD杆必须为最短杆且应满足杆长条件①AB杆为中间杆(300mm≤l AB≤500mm)时,l AD+l BC≤l CD+l AB,由此可得450mm ≤l AB≤500mm②AB杆为最长杆(500mm≤l AB<1150mm)时,l AB+l AD≤l CD+l BC,由此可得500mm ≤l AB≤550mm由此可知:450mm≤l AB≤550mm2-7 解:a )b )c )d )e ) 各机构压力角和传动角如图所示,图a)、d )机构无死点位置,图b)、c )、e )机构有死点位置2-8 解:用作图法求解,主要步骤: (1)计算极位夹角:︒=+-⨯︒=+-⨯︒=3615.115.118011180K K θ (2)取比例尺μ=0.001m/mm(3)根据比例尺和已知条件定出A 、D 、C 三点,如图所示(4)连接AC ,以AC 为边作θ角的另一角边线,与以D 为圆心、摇杆DC 为半径的圆弧相交于C 1和C 2点,连接DC 1和DC 2得摇杆的另一极限位置(两个)(5)从图中量得AC =71mm ,AC 1=26mm ,AC 2=170mm (6)当摇杆的另一极限位置位于DC 1时:5mm .2221=⨯=AC AC l AB -μ,5mm .4821=+⨯=AC AC l BC μ (7)当摇杆的另一极限位置位于DC 1时:5mm .4922=⨯=AC AC l AB -μ,5mm .12022=+⨯=AC AC l BC μ 答:曲柄和连杆的长度分别为22.5mm 、48.5mm 和49.5mm 、120.5mm 。
2-9 解:用作图法求解,主要步骤: (1)计算极位夹角:︒=+-⨯︒=+-⨯︒=4.1612.112.118011180K K θ (2)取比例尺μ=0.001m/mm(3)根据比例尺和已知条件定出滑块的两极限位置C 1、C 2两点,如图所示 (4)连接C 1C 2,以C 1C 2为直角边作直角三角形C 1C 2P ,使∠C 1C 2P =90°-θ=73.6°(5)以C 2P 为直径作圆O(6)将C 1C 2偏移e 值,与圆O 交于A 点,连接AC 1和AC 2, (7)从图中量得AC 1=34mm ,AC 2=82mm ,则:24mm 212=⨯=AC AC l AB -μ,58mm 221=+⨯=AC AC l BC μ 答:曲柄和连杆的长度分别为24mm 和58mm 。
2-10 解:用作图法求解,主要步骤: (1)计算极位夹角:︒=+-⨯︒=+-⨯︒=3014.114.118011180K K θ (2)取比例尺μ=0.002m/mm(3)根据比例尺和已知条件定出机架AC ,如图所示 (4)根据摇杆的摆角等于极为夹角作出摇杆的两极限位置 (5)过A 点作摇杆两极限位置的垂线,得垂足点B 1、B 2 (6)从图中量得AB 1=23mm ,则26m m 1=⨯=AB l AB μ 答:曲柄的长度为26mm 。
2-11 解:用作图法求解,主要步骤: (1)计算极位夹角:︒=+-⨯︒=+-⨯︒=0111118011180K K θ (2)取比例尺μ=0.001m/mm(3)根据比例尺和已知条件定出D 、C 1、C 2三点,如图所示 (4)过D 点作C 1D 的垂线,并与C 1C 2的连线交于A 点 (5)从图中量得AD =220mm ,AC 1=234mm ,AC 2=180mm ,则:27mm 212=⨯=AC AC l AB -μ,207mm 212=+⨯=AC AC l BC μ,220m m =⨯=AD l AD μ答:曲柄的长度为27mm ,连杆的长度为207mm ,机架的长度为220mm 。
三、凸轮机构3-1 判断题(1)√ (2)× (3)√ (4)× (5)× (6)× (7)×(8)× (9)√ (10)√ (11)√ (12)√ (13)√ (14)√(15)× (16)√ (17)√ (18)√ (19)× 3-2 填空题(1)使用 (2)盘形 (3)凸轮轮廓 (4)变曲率 (5)行程(6)行程 (7)轮廓 (8)凸轮的转角,从动件的位移 (9)最小(10)法线 (11)大 (12)等速 (13)小 (14)许用压力角(15)低 (16)大 (17)大 (18)内凹 (19)抛物线 (20)刚性 3-3 选择题(1)B (2)A (3)A (4)A (5)A (6)C (7)A(8)A (9)A (10)A (11)A (12)A (13)A (14)A(15)A (16)A (17)B (18)A (19)A (20)C (21)D(22)A (23)B (24)D (25)B (26)B (27)C 3-4 解:(1)凸轮的基圆和基圆半径的标注如图所示(2)从动件的位移线图s-t和升程h的标注如图所示3-5 解:凸轮的位移线图如图所示。