信号与线性系统题解第九章
- 格式:doc
- 大小:1.68 MB
- 文档页数:37
目 录第1章 信号与系统1.1 复习笔记1.2 课后习题详解1.3 名校考研真题详解第2章 连续系统的时域分析2.1 复习笔记2.2 课后习题详解2.3 名校考研真题详解第3章 离散系统的时域分析3.1 复习笔记3.2 课后习题详解3.3 名校考研真题详解第4章 傅里叶变换和系统的频域分析4.1 复习笔记4.2 课后习题详解4.3 名校考研真题详解第5章 连续系统的s域分析5.1 复习笔记5.2 课后习题详解5.3 名校考研真题详解第6章 离散系统的z域分析6.1 复习笔记6.2 课后习题详解6.3 名校考研真题详解第7章 系统函数7.1 复习笔记7.2 课后习题详解7.3 名校考研真题详解第8章 系统的状态变量分析8.1 复习笔记8.2 课后习题详解8.3 名校考研真题详解第1章 信号与系统1.1 复习笔记一、信号的基本概念与分类信号是载有信息的随时间变化的物理量或物理现象,其图像为信号的波形。
根据信号的不同特性,可对信号进行不同的分类:确定信号与随机信号;周期信号与非周期信号;连续时间信号与离散时间信号;实信号与复信号;能量信号与功率信号等。
二、信号的基本运算1加法和乘法f1(t)±f2(t)或f1(t)×f2(t)两信号f1(·)和f2(·)的相加、减、乘指同一时刻两信号之值对应相加、减、乘。
2.反转和平移(1)反转f(-t)f(-t)波形为f(t)波形以t=0为轴反转。
图1-1(2)平移f(t+t0)t0>0,f(t+t0)为f(t)波形在t轴上左移t0;t0<0,f(t+t0)为f(t)波形在t轴上右移t0。
图1-2平移的应用:在雷达系统中,雷达接收到的目标回波信号比发射信号延迟了时间t0,利用该延迟时间t0可以计算出目标与雷达之间的距离。
这里雷达接收到的目标回波信号就是延时信号。
3.尺度变换f(at)若a>1,则f(at)波形为f(t)的波形在时间轴上压缩为原来的;若0<a<1,则f(at)波形为f(t)的波形在时间轴上扩展为原来的;若a<0,则f(at)波形为f(t)的波形反转并压缩或展宽至。

第1章基本概念K第1章习题k1.1解:(1)x(t)为周期信号,周期为T=10。
(2)x(t)为非周期信号。
(3)x[n]为非周期信号。
(4)x[n]为周期信号,周期为N=2。
(5)x(t)为非周期信号。
(6)x[n]为周期信号,周期为N=2。
1.2解:(1)x(t)为功率信号。
(2)x(t)既不是能量信号也不是功率信号。
(3)x[n]为能量信号。
(4)x(t)为能量信号。
(5)x(t)为能量信号。
(6)x[n]为能量信号。
1.3略。
1.4略。
1.5(原题有误)一个离散时间系统的激励与响应的关系为y[n]=M∑i=0b i x[n−i]。
用算符S−k代表将信号x[n]平移k个单位时间得到输出信号x[n−k]的系统,即x[n−k]=S−k(x[n])。
写出联系y[n]与x[n]的系统算符T及其可逆系统的算符T inv。
解:提示:可逆系统为y[n]−M∑i=1b i x[n−i]=b0x[n]。
1.6解:(1)因果、无记忆、非线性、时不变、BIBO稳定系统。
(2)因果、无记忆、线性、时变和BIBO稳定系统。
(3)因果、无记忆、线性、时变和非稳定系统。
(4)因果、记忆、线性、时不变和BIBO稳定系统。
(5)因果、无记忆、线性、时变和BIBO稳定系统。
(6)因果、记忆、时不变、非稳定系统。
–2/48–第1章基本概念(7)因果、无记忆、线性、时不变和BIBO稳定系统。
(8)非因果系统、无记忆、线性、时不变、BIBO稳定系统。
1.7证明略。
1.8解:(1)x[n]的响应为{1,1,−1,2,n=0,1,2,3}。
(2)x[n]的响应为{1,1,−3,1,3,−5,2,n=−3∼3}。
(3)x[n]的响应为{1,0,−1,4,−3,2,n=−2∼3}。
1.9证明提示:根据微积分的极限定义证明。
1.10解:(1)x(t)的响应为4(1−e−t)u(t)−6(1−e−t+1)u(t−1)。
(2)x(t)的响应为[2(t+e−t)−2]u(t)。
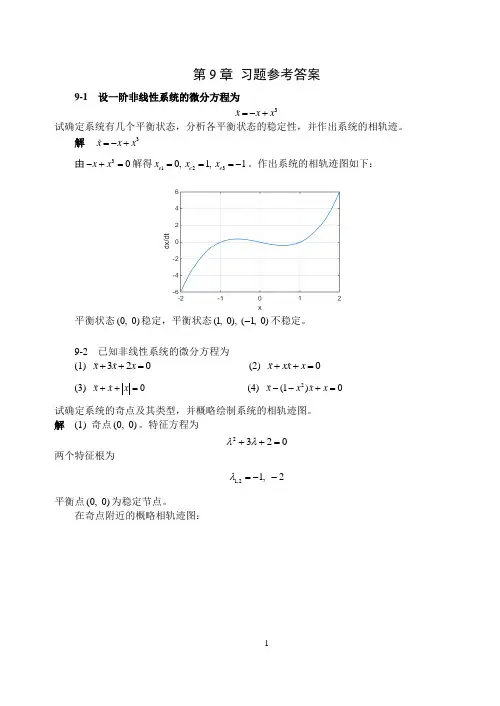
第9章 习题参考答案9-1 设一阶非线性系统的微分方程为3x x x =-+试确定系统有几个平衡状态,分析各平衡状态的稳定性,并作出系统的相轨迹。
解 3x x x =-+由30x x -+=解得1230, 1, 1e e e x x x ===-。
作出系统的相轨迹图如下:平衡状态(0, 0)稳定,平衡状态(1, 0), (1, 0)-不稳定。
9-2 已知非线性系统的微分方程为(1) 320x x x ++= (2) 0x xx x ++= (3) 0x x x ++= (4) 2(1)0x x x x --+= 试确定系统的奇点及其类型,并概略绘制系统的相轨迹图。
解 (1) 奇点(0, 0)。
特征方程为2320λλ++=两个特征根为1,21, 2λ=--平衡点(0, 0)为稳定节点。
在奇点附近的概略相轨迹图:x(2) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型为0x x +=其特征方程为210λ+=两个特征根为1,2j λ=±平衡点(0, 0)为中心点。
在奇点附近的概略相轨迹图:x(3) 奇点(0, 0)。
原方程可改写为0000x x x x x x x x ++=≥⎧⎨+-=<⎩其特征方程、特征根和类型为21,221,2100.50.866 10 1.618, 0.618 j λλλλλλ⎧++==-±⎪⎨+-==-⎪⎩稳定焦点鞍点 在奇点附近的概略相轨迹图:(4) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型为x x x-+=其特征方程为210λλ-+=两个特征根为1,20.50.866jλ=±平衡点(0, 0)为不稳定焦点。
在奇点附近的概略相轨迹图:xx9-3 非线性系统的结构图如图9-48所示。
系统开始是静止的,输入信号r(t)=4·1(t),试写出开关线方程,确定奇点的位置和类型,在e-e平面上画出该系统的相平面图,并分析系统的运动特点。

第6章 系统及系统的时域分析1. 解:由于系统(1)不满足分解性;系统(2)不满足零输入线性;系统(3)不满足零状态线性,故这三个系统都不是线性系统。
对于系统(4),如果直接观察)(n y ~)(n f 关系,似乎系统既不满足齐次性,也不满足叠加性。
但考虑到令)(n f =0时,系统响应为常数b ,若把它看成是由初始状态引起的零输入响应时,系统仍是满足线性系统条件的,故系统(4)是线性系统。
2. 解:(1) 已知)(t f →)](cos[)(t f a t y f =,设 dd t t t t f t f >-=),()(1,则其零状态响应为)](cos[)](cos[)(11d f t t f a t f a t y -==,显然 )()(1d f f t t y t y -=,故该系统是时不变系统。
(2) 已知)(n f →)()(n bf n y f =,设01),()(n n n n f n f >-=,则其零状态响应为)()()(011n n bf n bf n y f -==,显然 )()(01n n y n y f f -=,故该系统是时不变系统。
3. 解:对于(1)~(4),由于任一时刻的零状态响应均与该时刻以后的输入无关,因此都是因果系统。
而对于(5),系统任一时刻的零状态响应都与该时刻以后的激励有关。
响应在先,激励在后,这在物理系统中是不可能的。
因此,该系统是非因果的。
(6)也是非因果的,因为如果0)(=t f ,0t t < 则有 0)3()(==t f t y f ,3t t <可见在区间003t t t <<上0)(≠t y f ,即零状态出现于激励之前,因而该系统是非因果的。
4. 解:(1)显然,无论激励)(n f 是何种形式的序列,只要它是有界的,那么)(n y f 也是有界的,因果该系统是稳定的。
(2)若)()(t u t f =,显然该激励是有界的,但 t x x u t y tf ==⎰∞-d )()(,0≥t它随时间t 无限增长,故该系统是不稳定的。
信号与线性系统-9(总分:100.00,做题时间:90分钟)一、计算题(总题数:17,分数:100.00)求下列序列的卷积和。
(分数:8.00)(1).ε(k)*ε(k)(分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:解由卷积和的定义有(2).0.5 kε(k)*ε(k)(分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:解由卷积和的定义有(3).2 kε(k)*3 kε(k)(分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:解由卷积和的定义有(4).kε(k)*δ(k-1)(分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:解由卷积和的定义有1.证明卷积和的移序特性,即若e(k)*h(k)=y(k),则e(k-k 1 )*h(k-k 2 )=y(k-k 1 -k 2 )(分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:证由卷积和的定义得令j-k 1 =x,则求下列差分方程所示系统的零状态响应。
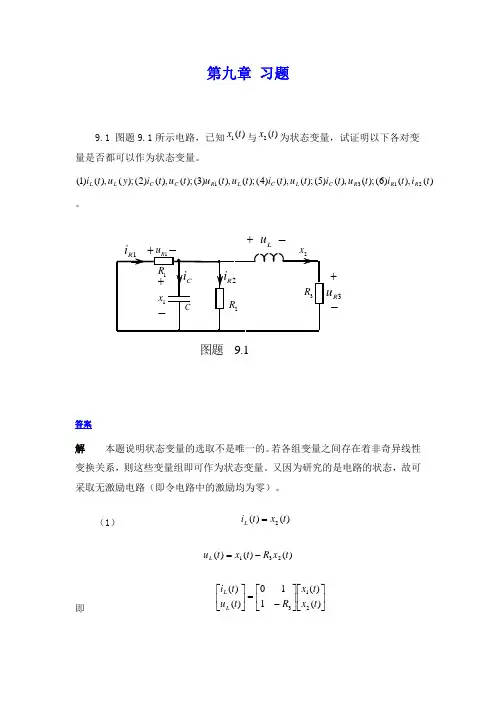
第九章 习题9.1 图题9.1所示电路,已知)(1t x 与)(2t x 为状态变量,试证明以下各对变量是否都可以作为状态变量。
)(),()6();(),()5();(),()4();(),()3();(),()2();(),()1(2131t i t i t u t i t u t i t u t u t u t i y u t i R R R C L C L R C C L L 。
9.1图题++--3R u L u答案解 本题说明状态变量的选取不是唯一的。
若各组变量之间存在着非奇异线性变换关系,则这些变量组即可作为状态变量。
又因为研究的是电路的状态,故可采取无激励电路(即令电路中的激励均为零)。
(1) )()(2t x t i L =)()()(231t x R t x t u L -=即 ⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡)()(110)()(213t x t x R t u t i L L(2)=---=)()(1)(1)(21211t x t x R t x R t i C)()()11(2121t x t x R R -+-)()(1t x t u C =即 ⎥⎦⎤⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡+-=⎥⎦⎤⎢⎣⎡)()(011)11()()(2121t x t x R R t u t i C C(3) )(11t x u R -=)()()(231t x R t x t u L -=即 ⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡)()(101)()(2131t x t x R t u t u L R(4))()()11()(2121t x t x R R t i C -+-=)()()(231t x R t x t u L -=即⎥⎦⎤⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡--+-=⎥⎦⎤⎢⎣⎡)()(11)11()()(21321t x t x R R R t u t i L C(5))()()11()(2121t x t x R R t i C -+-=)()(233t x R t u R =即⎥⎦⎤⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡-+-=⎥⎦⎤⎢⎣⎡)()(01)11()()(213213t x t x R R R t u t i R C可见以上5对变量的变换矩阵,其行列式的值均不为零,即它们均为非奇异矩阵,故以上的五对变量组均可作为该电路的状态变量。
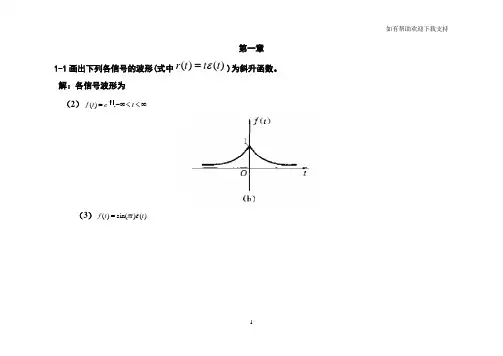
第一章 信号与系统(二)1-1画出下列各信号的波形【式中)()(t t t r ε=】为斜升函数。
(2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 解:各信号波形为 (2)∞<<-∞=-t e t f t ,)((3))()sin()(t t t f επ=(4))(sin )(t t f ε=(5))tf=r)(sin(t(7))f kε=t)(2(k(10))(])1(1[)(k k f k ε-+=1-2 画出下列各信号的波形[式中)()(t t t r ε=为斜升函数]。
(1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f(5))2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε(11))]7()()[6sin()(--=k k k k f εεπ (12))]()3([2)(k k k f k---=εε 解:各信号波形为 (1))2()1(3)1(2)(-+--+=t t t t f εεε(2))2()1(2)()(-+--=t r t r t r t f(5))2()2()(t t r t f -=ε(8))]5()([)(--=k k k k f εε(11))]7()()[6sin()(--=kkkkfεεπ(12))]()3([2)(kkkf k---=εε1-3 写出图1-3所示各波形的表达式。
1-4 写出图1-4所示各序列的闭合形式表达式。
1-5 判别下列各序列是否为周期性的。
如果是,确定其周期。
1第一章1-1画出下列各信号的波形(式中)()(t t t r ε=)为斜升函数。
解:各信号波形为 (2)∞<<-∞=-t e t f t ,)((3))()sin()(t t t f επ=(4))fε=t(t(sin)(5))tf=(sinr(t)2(7))tf kε(k=(2)(10))f kεk-=(k+]()1()1[341-2 画出下列各信号的波形[)()(t t t r ε=为斜升函数]。
(1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f(5))2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε(11))]7()()[6sin()(--=k k k k f εεπ (12))]()3([2)(k k k f k---=εε 解:各信号波形为 (1))2()1(3)1(2)(-+--+=t t t t f εεε(2))2()1(2)()(-+--=t rt rt rtf(5))2()2()(ttrtf-=ε56(8))]5()([)(--=k k k k f εε(11))]7()()[6sin()(--=k k k k f εεπ(12))]()3([2)(kkkf k---=εε71-3 写出图1-3所示各波形的表达式。
81-4 写出图1-4所示各序列的闭合形式表达式。
9101-5 判别下列各序列是否为周期性的。
如果是,确定其周期。
(2))63cos()443cos()(2ππππ+++=k k k f (5))sin(2cos 3)(5t t t f π+=解:111-6 已知信号)(t f 的波形如图1-5所示,画出下列各函数的波形。
(1))()1(t t f ε- (2))1()1(--t t f ε (5))21(t f - (6))25.0(-t f(7)dtt df )( (8)dx x f t ⎰∞-)(解:各信号波形为 (1))()1(t t f ε-12(2))1()1(--t t f ε(5))21(t f -13(6))25.0( t f(7)dt t df )((8)dxxft⎰∞-)(14151-7 已知序列)(k f 的图形如图1-7所示,画出下列各序列的图形。
第一章 习 题1-1 画出下列各信号的波形:(1) f 1(t)=(2-e -t )U(t); (2) f 2(t)=e -t cos10πt×[U(t -1)-U(t-2)]。
答案(1))(1t f 的波形如图1.1(a )所示.(2) 因t π10cos 的周期s T 2.0102==ππ,故)(2t f 的波形如图题1.1(b)所示.1-2 已知各信号的波形如图题1-2所示,试写出它们各自的函数式。
答案)1()]1()([)(1-+--=t u t u t u t t f)]1()()[1()(2----=t u t u t t f)]3()2()[2()(3----=t u t u t t f1-3 写出图题1-3所示各信号的函数表达式。
答案2002121)2(21121)2(21)(1≤≤≤≤-⎪⎩⎪⎨⎧+-=+-+=+=t t t t t t t f)2()1()()(2--+=t u t u t u t f)]2()2([2sin )(3--+-=t u t u t t f π)3(2)2(4)1(3)1(2)2()(4-+---++-+=t u t u t u t u t u t f1-4 画出下列各信号的波形:(1) f 1(t)=U(t 2-1); (2) f 2(t)=(t-1)U(t 2-1);(3) f 3(t)=U(t 2-5t+6); (4)f 4(t)=U(sinπt)。
答案(1) )1()1()(1--+-=t u t u t f ,其波形如图题1.4(a)所示.(2))1()1()1()1()]1()1()[1()(2---+--=--+--=t u t t u t t u t u t t f 其波形如图题1.4(b)所示.(3))3()2()(3-++-=t u t u t f ,其波形如图1.4(c)所示.(4) )(sin )(4t u t f π=的波形如图题1.4(d)所示.1-5 判断下列各信号是否为周期信号,若是周期信号,求其周期T 。
《信号与系统》第1~8章习题参考解答第一章 (2)第二章 (13)第三章 (22)第四章 (35)第五章 (48)第六章(无) (56)第七章 (57)第八章 (65)第一章1-4 对于例1-1所示信号,由f (t )求f (−3t − 2),但改变运算顺序,先求f (3t )或先求f (−t ),讨论所得结果是否与原例之结果一致。
解:(1). 例1-1的方法: f (t )→ f (t − 2)→ f (3t − 2)→ f (−3t − 2) (2). 方法二:f (t )→ f (3t )→ 2[3()]3f t − →f (−3t − 2) (3). 方法三:f (t )→f (−t ) →[(2)]f t −+ →f (−3t − 2)方法三:1-5 已知()f t ,为求0()f t at −应按下列哪种运算求得正确结果(式中0t ,a 都为正值)?(1)()f at −左移0t (2)()f at 右移0t (3)()f at 左移0t a (4)()f at −右移0ta解:(4)()f at −右移t a:故(4)运算可以得到正确结果。
注:1-4、1-5 题考察信号时域运算:1-4 题说明采用不同的运算次序可以得到一致的结果; 1-5 题提醒所有的运算是针对自变量t 进行的。
如果先进行尺度变换或者反转变换,再进行移位变换,一定要注意移位量和移位的方向。
1-9 粗略绘出下列各函数式的波形图: (1)()(2)()t f t e u t −=− (2)2()(36)()t t f t e e u t −−=+ (3)3()(55)()t t f t e e u t −−=−(4)()cos(10)[(1)(2)]t f t e t u t u t π−=−−− 解:(1)()(2)()tf t e u t −=−(2)2()(36)()ttf t e eu t −−=+(3)3()(55)()ttf t e eu t −−=−(4)()cos(10)[(1)(2)]tf t e t u t u t π−=−−−1-12 绘出下列各时间函数的波形图,注意它们的区别:(1)[()(1)]−−;t u t u t(2)(1)�;t u t−(3)[()(1)](1)−−+−;t u t u t u t(4)(1)(1)−−;t u t(5)(1)[()(1)]−−−−;t u t u t(6)[(2)(3)]−−−;t u t u t(7)(2)[(2)(3)]t u t u t−−−−。
第9章随机信号通过线性系统9.0 引言9.1 随机信号的概念9.2 连续随机信号的统计特征9.3 离散随机信号的统计特征9.4 线性连续系统分析9.5 线性离散系统分析9.6 白噪声通过线性系统分析9.0 引言由于系统输入是随机信号,所以输出也是随机信号,一般不能用显式表示。
随机信号一般用统计特性描述,因此,随机信号通过线性系统的分析问题通常是分析输入与输出的一、二阶统计特征(或数字特征)之间的关系。
对于连续时间系统,分析任务是给定输入x(t)的一、二阶统计特性(均值、均方值、方差、相关函数和功率密度谱函数)和系统的特性(冲激响应h(t)、传递函数H(s)和频率特性H(jω)), 求输出的一、二阶统计特征和输入与输出之间的统计特征(互相关函数和互谱密度)。
对于离散时间系统,情况也类似,只是h(t)、H(s)、H(jω)分别用h(k)、H(z)、H(e jω )代替。
由于输入随机信号又可区分为平稳随机信号和非平稳随机信号,因此,相应有两种情况的分析。
本章只讨论平稳随机信号分析,此时输入是平稳的,系统特性是确定的和稳定的,经过一段过渡时期后,输出最终也是平稳的。
分析任务是求输出进入平稳状态后的均值my ,方差Dy,自相关函数Ryy(τ), 功率密度谱Sy (jω),以及输入和输出间的互相关函数Rxy(τ),互谱密度Sxy(jω)等。
9.1 随机信号的概念9.1.1 随机过程和随机信号的概念在概率论中介绍过随机变量的概念,设X是一个随机变量,则X的取值是随机的,通常用概率密度函数f(x)描述。
如果使上述随机变量X随时间t改变,即表示为X(t),这时称X(t)是一个随机过程。
这就是随机过程概念的简单描述。
随机信号也是随机过程。
设X(t)是一个随机信号,当t=t0 )为一个随机变量。
时,X(t设有一个随机信号产生器,若有甲、乙两个同学分别去做(t),乙观实验并观察实验结果,甲观察到的实验输出波形为x1(t),x1(t)≠x2(t),如图9.1所示。