基于组态王的机械手监控系统设计
- 格式:doc
- 大小:166.50 KB
- 文档页数:5
用组态软件实现机械手仿真监控系统机械手仿真监控系统可以通过组态软件实现,它是一种集机械,电子,信息等技术为一体的现代化自动化系统。
该系统可以实现对机械手的仿真监控和控制,同时能够提升生产效率、降低成本,还可以保障员工的安全,提高企业的竞争力。
本文将详细阐述用组态软件实现机械手仿真监控系统的技术流程、主要应用场景以及优缺点等方面的信息。
一、技术流程1. 设计建模首先需要进行机械手的设计建模,确定机械手的形状和结构,包括机械手的各个部件、工作范围、运动轨迹等。
在设计建模过程中,需要精确掌握每个零件的运动规律和相互作用关系,并对其进行模拟和测试。
2. 组态软件的配置选择适合的组态软件,进行安装配置和网络连接等操作,确保软件能够正常运行,并正常连接到机械手。
3. 参数设置根据机械手的设计要求和实际使用场景,对机械手的各项参数进行设置,包括机械手的工作速度、精度等。
4. 组态在软件中进行组态,包括设备的连接、设备参数的设置、运动规划等。
组态完成后可以对机械手进行仿真测试。
5. 仿真模拟通过组态软件进行仿真模拟,对机械手进行模拟控制,并通过实验验证机械手的正常运行。
6. 系统集成将机械手和监控系统进行集成,通过软件中的控制界面可以实现对机械手的监控和控制。
二、主要应用场景1. 工业生产机械手是自动化生产线中的必要设备,它可以快速准确地完成生产任务,并可以适应不同的工作场合,如装配、搬运、钻孔等。
机械手的自动化生产可以有效提高生产效率和工作质量,同时减少了人力成本。
2. 物流仓储机械手在物流仓储领域广泛应用,它可以帮助仓库快速装卸货物,并可以支持多品种、小批量的仓储管理,提高了物流效率。
3. 医疗卫生机械手在医疗卫生领域也得到了应用,可用于手术机器人、康复治疗等。
机械手可以在手术时减少创口和出血,同时减轻医生的体力工作。
4. 农业领域机械手在农业领域的应用也开始逐渐增加,可以用于智能化农机、农产品分拣等方面。
基于组态王的机械手监控系统设计[摘要]在本设计中,我将介绍两种方式来实现对机械手系统的控制,并且在本文中将具体介绍关于组态王所能实现的控制方式,以及即时信息的反馈功能。
[关键词]机械手组态王监控系统一、机械手控制要求分析下面通过具体的设计来实现本监控系统的功能,现在,分析机械手控制系统的控制要求。
机械手具有启动、停止、移动、抓、放等功能。
机械手操作人员可以通过启动、停止按钮来控制机械手的启动和停止。
移动和抓、放功能通过步进电机和直流电机来实现。
底盘的旋转则直接由直流电机通过电机的正、反转来实现对其的控制。
抓紧和放松电磁阀的控制当相应的电磁阀动作,则机械手会作出相应的机械动作。
对机械手的操作可以有两种方式:第一种是由现场操作人员通过相应的按钮控制机械手的动作;第二种是根据实际的生产工艺要求,编制出控制程序,按照事先预定的顺序控制机械手的动作。
二、机械手监控系统简介本文将实现对机械手控制系统进行信号采集、系统运行状况时实远程监控等多项功能,整个工程的组态工作包括定义环境的数据变量,动画制作,控制流程的脚本程序的编写,完成上位工控机与底层设备的通讯,信号的输出,安全机制等。
控制流程的编写是对系统运行流程实现有效控制的手段,运行策略本身是系统提供的一个框架,其里面放置有策略条件构件和策略构件组成的“策略行”,通过对运行策略的定义,使系统能够按照设定的顺序和条件操作实时数据库、控制用户窗口的打开、关闭并确定设备构件的工作状态等,从而实现对外部设备工作过程的精确控制,包括编写控制程序,选用各种功能构件,如数据提取、历史曲线、定时器、配方操作、多媒体输出等。
通过工程浏览器,可以很清楚地看到真个系统工程涉及制作的画面,它将画面制作系统设计的图形画面、命令语言、设备管理、变量管理、网络配置、配方管理、系统配置(包括开发系统配置、运行系统配置、报警配置、历史数据记录、网络配置、打印和用户配置等)工程资源进行了集中的管理,在一个窗口进行了树型结构的排列,左边部分是“工程目录显示区”,右边部分为“目录内容显示区”。
电气及自动化课程设计报告题目课学生姓名学生学号年级专业班级指导教师机械与电气工程学院制2017年5月基于组态王的机械手设计机械与电气工程学院自动化1课程设计的任务与要求1.1 课程设计的任务①熟悉组态王软件,达到熟悉使用组态软件的常用工具;②学会完成组态王工程的步骤;③锻炼动手能力和分析问题解决问题的能力。
1.2 课程设计的要求完成一个机械手的监控系统,具有流程图图画面,个画面能实现灵活转换2机械手设计步骤2.1启动组态王建立新工程打开组态王软件,计入工程管理器,新建一个工程,选择它的储存路径并设定项目名为“机械手设计”。
2.2新建设备并将其命名为PLC进入工程浏览器后,首先进行设备的链接,上位机COM1与PLC之间通过PC\PPI 编程电缆链接,选择工程浏览器左侧大纲“设备\COM1”,在工程浏览器右侧用鼠标双击“新建”图标,运行“设备配置向导”,相关配置如下图:图1设备配置图2.3通讯设备参数的设定在组态王工程浏览器的工程目录显示区,点击“设备COM1”,进行COM1参数设置,是系统的COM1口设置与PLC一致[1]。
图2 COM1口的设置图2.4 定义变量数据库是”组态王”软件的核心部分,在工程管理器中,选择”数据库\数据词典”,双击”新建图标”,弹出”变量属性”对话框,创建机械手各个变量数据,数据变量是构成实时数据库的基本单元,建立实时数据库的过程也即定义数据变量的过程。
定义数据变量的内容主要包括:指定数据变量名称、类型、初始值和数值范围,确定与数据变量存盘相关的参数,如存盘的周期、存盘的时间范围和保存期限等。
数据对象有I/O开关型、I/O数值型、I/O字符型、内存开关型等8种类型。
不同类型的数据对象,属性不同,用途也不同[3]。
设计中的数据变量:时间(内存整数)、垂直移动(内存整数)、水平移动(内存整数)、夹紧(内存离散)、启动(内存离散)。
变量设置如下图:图3 数据库图①定义启动定义启动如下图:图4 启动的定义图时间的定义如下图:图5时间的定义图③定义上行上行的定义如下图:图6 上行的定义图右行的定义如下图:图7 右行的定义图⑤定义下行下行的定义如下图:图8 下行定义图⑥定义夹紧加紧的定义如下图:图9 加紧定义图2.5 机械手的画面绘制使用工程管理器新建一个组态王工程后,进入组态王工程浏览器,新建组态王画面。
《计算机控制系统》组态王课程设计报告设计题目:机械手控制系统设计专业班级学号学生姓名设计时间2011-2012学年下学期教师评分2012年5月18日机械手控制系统设计一、设计内容 (3)二、设计目的 (3)三、设计步骤 (3)1、启动组态王,新建工程 (3)2、新建设备,并将其命名为PLC (3)3、通讯设备参数设置 (4)4、定义变量 (4)(1)、定义启动(指示灯) (5)(2)、定义上(指示灯) (5)(3)、定义下(指示灯) (6)(4)、定义上行 (6)(5)、定义下行 (7)(6)、定义左(指示灯) (7)(7)、定义右(指示灯) (8)(8)、定义夹紧显示(指示灯) (8)(9)、定义垂直上 (9)(10)、定义垂直下 (9)(11)、定义物体上 (10)(12)、定义物体下 (10)(13)、定义水平左 (11)(14)、定义水平右 (11)(15)、定义水平左1 (12)(16)、定义水平右1 (12)(17)、定义时间 (13)(18)、定义夹紧物体 (13)(19)、定义旋转 (14)(20)、定义加紧旋转 (14)(21)、定义放(指示灯) (15)(22)、定义电机旋转(指示灯) (15)5、画面绘制 (16)6、动画连接及参数设定 (17)(1)、机械手 (17)(2)、物体 (18)(3)、传送带 (18)(4)、指示灯、开关 (19)四、应用程序命令语言 (20)五、机械手工作过程 (21)六、心得体会 (21)一、设计内容完成一个工业机械手监控系统设计,有具体流程图画面,各画面间能实现灵活切换。
具体的控制要求是:(1)按下启动按钮后,机械手得电进入工作状态。
(2)按下复位按钮后,启动指示灯熄灭,不管机械手在什么位置,都将回到原始位置。
(3)按下启动按钮后,启动灯亮,机械手进入工作状态,机械手臂伸出→下降→夹紧→上升→右移→下降→放开→上升→左移,进行一次循环运行,最后回到原始位置,等待下一次运行启动。
基于组态王的机械手系统设计机械手系统是工业生产中常见的一种自动化设备,用于搬运、装配、拆卸、焊接等工作。
组态王是一种功能强大的工业控制软件,它可以集成各种传感器和执行器,并通过编程实现自动化控制。
本文将基于组态王的机械手系统设计进行详细的介绍。
首先,机械手系统通常由机械结构、传感器和执行器、控制系统等三个主要部分组成。
机械结构是机械手的实体框架,通过连接各个关节和连接件实现运动。
传感器主要用于获取环境信息和目标位置信息,如视觉传感器、力传感器等。
执行器用于控制机械手的运动,如电机、气动驱动等。
控制系统则负责整个机械手系统的控制和调度。
在设计机械手系统时,首先需要对目标任务进行分析和确定。
比如,机械手需要完成什么样的动作,需要搬运多重的物体,需要多大范围的工作空间等。
这些信息将决定机械手的结构、传感器和执行器的选择。
接下来,需要进行机械结构的设计。
机械结构需要具备足够的稳定性和刚度,同时要考虑到机械手需要达到的工作空间和负荷要求。
常见的机械结构有串联臂和并联臂两种。
串联臂机械手由一系列的关节和连接件组成,关节通过电机或气缸实现驱动。
并联臂机械手则是由多个杆件和平台组成,杆件通过驱动器与平台连接。
根据实际需求进行选择。
然后,根据机械手的结构确定传感器和执行器的类型和位置。
传感器主要用于获取机械手当前的位置和状态,以及周围环境的信息。
视觉传感器可以用于目标物体的检测和识别,力传感器可以用于控制机械手的力量和力矩。
执行器则用于控制机械手的运动。
根据实际需求选择合适的传感器和执行器,并合理布置其位置。
最后,设计机械手的控制系统。
组态王是一款功能强大的工业控制软件,可以实现机械手系统的自动化控制。
在设计控制系统时,首先需要编写控制程序。
编程需要考虑机械手的动作规划、路径规划、运动学和动力学模型等。
利用组态王的开发环境进行编程,可以方便地实现机械手的自动化控制。
同时,控制系统需要与传感器和执行器进行通信,以实时获取机械手的位置和状态,并控制执行器的动作。
提供全套,各专业毕业设计泸州职业技术学院毕业设计基于PLC与组态王Kingview6.50实现对机械手的控制设计学生姓名所在系机械工程系班级2012级2班专业机电一体化指导教师2014年9月15日摘要在工业生产等相关领域内,会有一些高温、腐蚀及有毒气体出现在工作环境中,危害了操作人员的健康,增加了工人的劳动强度。
而机械手可以解决这些问题。
机械手可在空间抓、放、搬运物体,动作灵活多样,从而替代人工操作,适用于可变换生产品种的中、小批量自动化生产。
本毕业设计任务主要通过PLC完成对一个5自由度的机械手模型控制,使其完成一系列的生产动作过程,并使用组态王软件对机械手进行监控,将机械手的动作过程进行了动画显示。
设计所使用的机械手系统(TVT-99D)是由三菱FX2N-48MT PLC主机、机械手(滚珠丝杆、滑轨)、Syntron 42BYG250C步进电机及其驱动器、传感器、光电编码器、气动元件等组成,可实现机械手的上下移动、左右移动、底盘旋转及手爪旋转、抓放等动作。
主要采用了步进顺序控制及步进控制技术。
涵盖了可编程控制技术,位置控制技术、检测技术等,是机电一体化的典型代表。
设计报告首先介绍了机械手控制方式的选择和所选择方式的简介;其次介绍了应用PLC设计机械手的步骤;还介绍了PLC机械手的程序调试;最后介绍了应用组态王对机械手监控的过程,包括画面绘制、数据变量的设置等。
【关键词】: 机械手 PLC 滚珠丝杠步进控制AbstractIn industrial production and other domains, something like high temperature, corrosion and poisonous gas appear at workplace, which would increased worker's labor intensity and even endangers their health. With manipulator used, those difficult problems can be easily solved. Hand operation can be replaced by manipulator operation, because it can grab, put, move objects flexibly and changefully. So it can be applied to transform the production of variety of medium and small-volume automated production.The task of the graduation design is to control a mechanical hand model with 5 degrees of freedom by PLC, and use it to complete a series of actions.The KINGVING is used to monitor the mechanical hand, and change its movement into animations. The system(model:TVT-99D) I used is composed by MITSUBISHIS FX2N-MT PLC, mechanical hand(ball screw, slide rail), Syntron 42BYG250C step motor and its driver module, sensor, photoelectric encoder ,pneumatic component and so on. It controls manipulator move vertically or horizontally, chassis or paw rotate, pack-and-place. The design mainly uses stepping sequence control and stepping control technology. The process covers programmable control technology, position control technology, detection technology, which is a typical representative of mechatronics.The design report firstly describes how to choose the way to control the mechanical hand and introductions of the ways. Then introduces the design steps. It also introduces program test of the manipulator.At last, the paper introduces the steps of processing and monitoring manipulator by KingView.【Key words】: mechanical hand PLC ball screw step contr目录一、绪论 (4)(一)课题研究目的及意义 (4)(二)国内外机械手研究概况 (4)1.国内方面 (4)2.国外方面 (4)二、机械手控制方式选择 (6)(一)机械手常用控制方法 (6)1.控制方式的分类 (6)2.机械手控制方式的选定 (7)(二)PLC简介 (7)1.PLC组成 (9)2.PLC的特点 (9)3. PLC的主要功能 (9)4. PLC的经济性分析 (10)5.PLC的应用领域及发展状况 (10)(三)组态王简介 (12)1.仿真的基本方法 (12)2.组态王软件特点 (13)1.机械手本体 (17)2.步进电机及其驱动器 (18)3.直流电机驱动器单元 (22)4.接近开关和限位开关 (23)5.旋转码盘 (24)三、应用PLC设计机械手的步骤 (26)(一)工艺控制和设计要求 (26)1.具体流程及步骤 (26)2.设计要求 (27)(二)PLC程序设计 (28)1. I/O点数的确定及PLC类型的选择 (28)2. PLC的I/O分配 (28)3.编程方式及指令的选择 (28)4.PLC程序的设计 (30)四、PLC机械手的程序调试 (36)(一)PLC控制的安装与布线 (37)1.输入接线 (37)2.电源接线 (37)3.接地 (38)五、应用组态王对机械手监控过程 (40)(一)画面绘制 (40)(二)数据变量的设置 (41)(三)组态王与PLC的通讯设置 (41)(四)实际监控 (41)六、小结 (43)(一)设计和调试过程遇到的问题及解决方法 (43)1.外部接线问题 (43)2.PLC选型的问题 (43)3.接近开关使用 (43)4.合并程序 (43)5.特殊辅助继电器M8029的使用 (44)6.步进电机控制问题 (44)(二)心得体会 (44)七、致谢 (45)参考文献 (46)一、绪论(一)课题研究目的及意义机械手是工业自动化领域中经常遇到的一种控制对象。
基于组态王的机械手系统设计组态王课程设计报告——机械手控制系统设计一.设计任务说明:1.机械手实验:熟完成一个工业机械手监控系统设计,(对象自己定)要求有流程图画面,报表画面。
各画面间能实现灵活切换,所以画面都能实现动画效果或数据或曲线显示,其中报表画面要求对机械手状态实现实时记录,并在能完成打印功能。
二.实验目的1.熟悉组态王软件,达到熟练使用组态软件的常用工具;2.学会完成组态工程的设计步骤;3.锻炼学生的动手能力和分析问题解决问题的能力。
三.实验步骤A .启动浏览器,新建工程。
B.设备定义:把地理上分散的物理硬件在软件上变成集中的逻辑硬件。
C.变量定义:完成所以能想到的变量定义,对于没有想到的后面设计过程遇到在定义也可。
注意:对I/O 或监控数据定义其报警条件和历史数据记录方式。
1定义x、x1、y、y1、启动、时间、旋转、停止D .画面绘制:完成各种需要画面的绘制。
E .动画连接及程序编写。
注意:对于没有实际对象的模拟监控变量一定要人为编程改变其数据变化,以此来仿真动画效果。
一、动画连接1 机械手2 物品3 传送带二、程序编写本站点启动 ==1)本站点时间本站点时间 +1; 点本站点 \x1+10;}本站点时间 >60)本站点时间 <=10)本站点本站点\y+10;}本站点时间本站点时间 <=20) 本站点本站点本站点本站点 \y1-10;}本站点时间本站点时间 <=30) 本站点本站点本站点本站点\x1+10;}本站点时间本站点时间 <=40) 本站点本站点本站点本站点\y1+10;}本站点时间本站点时间 <=50) 本站点本站点 \y-10;}本站点时间本站点时间 <=60)本站点本站点本站点旋转本站点旋转本站本站点时间本站点本站点本站点本站点本站点旋转=0;}}F.配置系统G .运行与调试。
对于不理想的在返回去重新设计。
四.实验结论或总结这次实验是我们小组每一个成员真正亲自参加的一次组态王应用练习实验,它帮助我们更加深刻的了解和掌握了一些关于组态王的应用知识和方法在这个学习调试运行的过程中我们也遇到很多问题经过老师和同学的帮助最终解决了这些问题,成功地调试出结果,完成了实验,达到了预期的效果和目标。
第36卷 第05期 第20138年6 5卷月数字技术与应用 数D字ig技it术al 与T应ec用hnologyww&Vol.36 No.5 May 2018数控技术DOI:10.19695/12-1369.2018.05.09基于 PLC 和组态王的机械手控制系统设计 *刘次乐 李小斌 吴宏岐 刘霞 (宝鸡文理学院电子电气工程学院,陕西宝鸡 721016)摘要:在我国机械手的发展越来越受到社会的关注,机械手取代人力的趋势日渐明显,机械手控制系统的研究和教学被许多高校关注,然而受实验室设备和场地的限制,在校大学生很难获得更多的实验机会。
因此,这里给出一种基于组态王和PLC的机械手控制系统设计方案,可有效解决实验条件不足的问题,帮助在校学生更好地理解学习机械手控制过程。
实践表明,该方案可以取得很好的研究、学习效果。
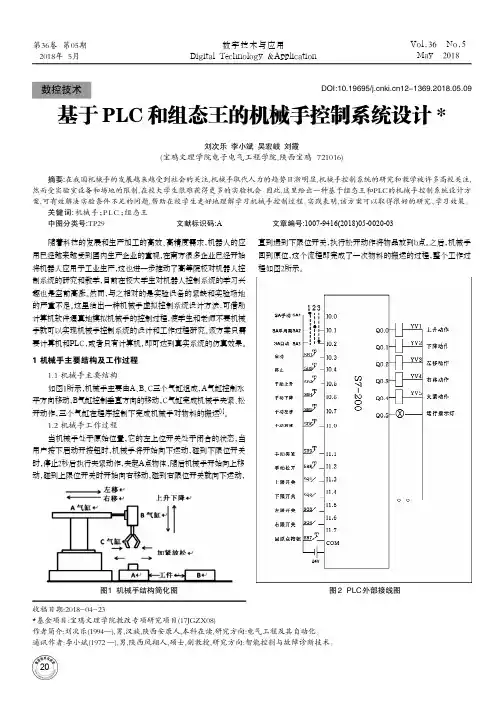
关键词: 机械手;P L C ;组态王中图分类号:TP29文献标识码:A文章编号:1007-9416(2018)05-0020-03随着科技的发展和生产加工的高效、高精度需求,机器人的应 直到遇到下限位开关,执行松开动作将物品放到b点。
之后,机械手 用已经越来越受到国内生产企业的重视,在南方很多企业已经开始 回到原位,这个流程即完成了一次物料的搬运的过程,整个工作过 将机器人应用于工业生产,这也进一步推动了高等院校对机器人控 程如图2所示。
制系统的研究和教学,目前在校大学生对机器人控制系统的学习兴 趣也是空前高涨。
然而,与之相对的是实验设备的紧缺和实验场地 的严重不足。
这里给出一种机械手虚拟控制系统设计方法,可借助 计算机软件逼真地模拟机械手的控制过程,使学生和老师不要机械 手就可以实现机械手控制系统的设计和工作过程研究。
该方案只需 要计算机和PLC,或者只有计算机,即可达到真实系统的仿真效果。
1 机械手主要结构及工作过程1.1 机械手主要结构 如图1所示,机械手主要由A、B、C三个气缸组成,A气缸控制水 平方向移动,B气缸控制垂直方向的移动,C气缸完成机械手夹紧、松 开动作,三个气缸在程序控制下完成机械手对物料的搬运[1]。
基于组态软件的机械手监控系统的设计机械设计制造及其自动化专业 xxx[摘要]本文简要介绍了工业机器人的概念,机械手的组成和分类,机械手的自由度和坐标形式,气动技术的特点,PLC控制的特点及国内外的开展状况。
论述了一种基于P LC控制的气动机械手的功能及工作原理,给出了气动系统的设计方案,详细阐述了控制系统的软硬件设计。
另外,还主要介绍了基于西门子公司S7-200系列的可编程控制器和亚控公司的组态软件组态王。
编程时调用了编程软件STEP 7 -Micro WIN编程软件,使得程序更为简洁,运行速度更为理想。
利用组态软件组态王设计人机界面,实现了机械手实时动作的监控。
[关键词]机械手;PLC;组态软件;组态王Manipulator Based on Configuration SoftwareMonitoring SystemMechanical Design , Manufacturing and Automation Major JIAO Shi-guangAbstract:This paper introduces the concept of industrial robots, robot formation and classification of degrees of freedom manipulator and the coordinate form of the characteristics of pneumatic technology, PLC control features and state of development at home and abroad. Paper based on PLC control Pneumatic Manipulator function and working principle, given the design of pneumatic system, described in detail the control system hardware and software design.In addition, it mainly introduces the Siemens S7-200 series of programmable controllers and sub-controlled companies Kingview configuration software. Programming programming software called STEP 7-Micro WIN programming software, making programs more concise, more desirable speed. Wang design using configuration software configuration man-machine interface to achieve real-time manipulator control action.Key words:Manipulator; PLC;Configuration software;Kingview目录1 绪论 (1)1.1 中国工业机器人现状与前景 (1)1.1.1 机械手监控的意义 (1)1.1.2 组态王组态软件在监控系统中的应用 (1)1.2 基于组态王机械手监控系统的组成 (2)1.3 本设计的主要工作 (2)2 机械手系统的总体设计 (2)2.1 机械手的硬件设计及工作原理 (2)2.2 系统工作方式设计 (3)2.3 机械手控制系统的组成 (3)2.4 PLC I/O分配表 (4)2.5 控制系统总体接线图 (4)3. PLC控制系统设计 (5)3.1 PLC的选型 (5)3.2 电源局部 (5)3.3 PLC控制系统的软件设计 (6)3.3.1 编程软件的安装与工程的组成 (6)3.3.2 通信参数的设置与在线连接的建立 (6)3.3.3 程序的编写与传送 (8)3.3.4 编写与传送用户程序 (8)3.4 程序的编制 (9)3.5 用编程软件监控与调试程序 (11)4 组态软件的工程设计与实现 (12)组态软件的介绍与开展 (12)4.2 制作一个工程的一般过程 (13)建立机械手组态工程 (13)新建一个工程 (13)4.3.2 创立机械手组态画面 (14)4.3.3 定义IO设备 (16)4.3.4 构造数据库 (16)4.3.5 建立动画连接 (17)4.3.6 运行和调试 (19)5 组态与PLC的连接 (20)组态与PLC的连接 (20)机械手的动作实现 (21)结束语 (22)参考文献 (23)附录 (24)致谢 (24)1 绪论1.1 中国工业机器人现状与前景工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。
毕业设计任务书7一、设计题目基于组态王的机械手监控系统设计二、设计要求基于组态王实现对机械手控制系统的动画设计,开发上位机监控界面。
组态王通过设备驱动程序从现场硬件设备获取实时数据并处理,以动画的方式在上位机屏幕上显示,同时按照组态要求和操作人员的指令使机械手按照设定的轨迹运行,并且将现场数据以报表的形式在监控界面中显示出来。
该系统可以很好的实现机械手的自动控制和管理。
三、设计依据PLC四、设计任务要求在规定时间内独立完成下列工作量:设计说明书需包括:①目录。
②系统设计思想③画出电路原理图④元器件及参数选择⑤收获体会。
⑥参考资料。
五、设计时间年月日至年月日。
指导教师:朱清智(签名)附参考资料:河南工业职业技术学院Henan Polytechnic Institute毕业设计题目__________班级__________姓名__________指导教师__________基于组态软件的机械手监控系统设计李向超制作内容提要本设计以机械手的全方位控制为目标、以PLC为主要控制工具、以组态王软件为辅助控制手段,实现了对机械手的上/下、左/右、旋转和夹紧/放松等运动的控制,并为其设计了自动和手动运行模式,手动模式包括点动、单步和复位运行,自动模式包括单周期和连续运行。
其中,点动运行可以很好地实现机械手工作方位的调整,配合其它运行模式以更圆满地完成搬运任务,使得机械手的搬运功能更加完善。
利用组态王软件实现了机械手控制系统的动画设计,开发了上位机监控界面。
组态王通过设备驱动程序从现场硬件设备获取实时数据并处理,以动画的方式在上位机屏幕上显示,同时按照组态要求和操作人员的指令使机械手按照设定的轨迹运行,并且将现场数据以报表的形式在监控界面中显示出来。
该系统可以很好的实现机械手的自动控制和管理。
英文版(The design of mechanical hand all-around control as the goal, to PLC as the main control tool, with kingiview software for auxiliary control means, realize the mechanical hands up / down, left / right, rotate and clamp / unclamp, motion control, and for the design of the automatic and manual operation mode, manual mode including point, step and reset operation, automatic modes include single cycle and continuous operation. Among them, point operation can achieve good mechanical hand working range of adjustment, with the other operating mode to more successfully to carry out the task, make the manipulator handling function more perfect. Use the software to achieve the manipulator control system design, development of PC monitoring interface. Configuration through a device driver from local hardware equipment and processing of real-time data, in an animation mode in the PC screen display, at the same time accordingto the configuration requirement and operator instructions for the manipulator according to the preset trajectory, and the field data in the form of statements in the monitor interface display. The system can achieve good mechanical hand for automatic control and management.)引言机械手,mechanical hand,也被称为自动手,auto hand。
基于PLC和组态王的机械手控制系统设计机械手控制系统设计的基础是PLC(可编程控制器)和组态王(一种图形化的编程软件),它们能够实现自动化控制和灵活的编程。
这篇文章将详细介绍基于PLC和组态王的机械手控制系统设计。
首先,PLC是一种可编程的电子设备,它能够根据预设的逻辑和指令来实现机械手的控制。
PLC拥有多个输入和输出接口,可以连接各种传感器、执行器和通信设备,通过读取传感器的信号,进行逻辑运算,并控制执行器的运动,从而实现机械手的运动控制。
接下来,组态王是一款常用的图形化编程软件,它能够简化PLC的编程过程。
通过组态王,我们可以直观地绘制机械手的动作流程图,并将其转化为PLC可识别的指令代码,从而实现机械手的自动化控制。
组态王不仅提供了丰富的图形元素,如按钮、开关、计数器等,还可以编写脚本代码以实现更复杂的逻辑控制。
在机械手控制系统设计中,首先需要确定机械手的运动轨迹和动作序列。
这包括机械手的起始位置、目标位置和运动速度等参数。
然后,我们可以使用组态王绘制机械手的动作流程图,将不同的动作通过连线连接起来,形成一个完整的控制流程。
接下来,根据机械手的运动轨迹和动作序列,我们可以编写PLC的控制程序。
在控制程序中,我们需要定义输入和输出接口,配置传感器和执行器的连接方式,并编写相应的逻辑控制代码。
通过组态王生成的指令代码,我们可以将其导入PLC中,并进行参数设置和调试。
除了基本的运动控制,机械手控制系统还可以实现更高级的功能,如启停控制、安全保护和通信接口等。
通过组态王的图形化编程界面,我们可以轻松地添加这些功能,并与PLC进行集成。
综上所述,基于PLC和组态王的机械手控制系统设计能够实现对机械手的自动化控制和灵活编程。
通过合理的软硬件配置和优化的控制算法,可以实现高效、稳定和精确的机械手操作。
这种设计方案在工业生产和物流领域具有广泛的应用前景。
基于组态王kingview6.53的机械手监控系统设计摘要:主要介绍了基于组态王Kingview6.53实现对机械手控制系统的动画设计,开发上位机监控界面。
组态王通过设备驱动程序从现场硬件设备获取实时数据并处理,以动画的方式在上位机屏幕上显示,同时按照组态要求与操作人员的指令使机械手按照设定的轨迹运行,并且将现场数据以报表的形式在监控界面中显示出来。
该系统可以很好的实现机械手的自动控制与管理。
关键词:机械手;S7-200 PLC;组态王0 引言在工业生产中,人们经常受到高温、腐蚀及各种辐射等因素的危害,增加了操作人员的劳动强度,甚至于危及生命。
机械手的问世,相应的各种难题迎刃而解。
本机械手控制系统采用THFJX-1型机械手实物教学模型。
用西门子S7-200 PLC 控制。
上位机监控系统采用组态王kingview6.53组态软件设计,组态王6.53是由亚控科技有限公司研制的组态软件,是运行于Microsoft Windows2000\XP 中文平台的中文界面的人机界面软件,为用户提供了解决实际工程问题的完整方案与开发平台,能够完成现场数据采集、实时与历史数据处理、报警与安全机制、流程控制、动画显示、曲线与报表输出、企业监控网络系统等功能。
通过对本监控系统的分析,主要实现了以下两个功能,一、充分利用了组态王的图形编辑功能,方便地构成监控画面,并以动画方式显示机械手的运行的状态二、生成实时报表与历史报表并保存到指定的文件夹下,还可以对指定的变量进行查询。
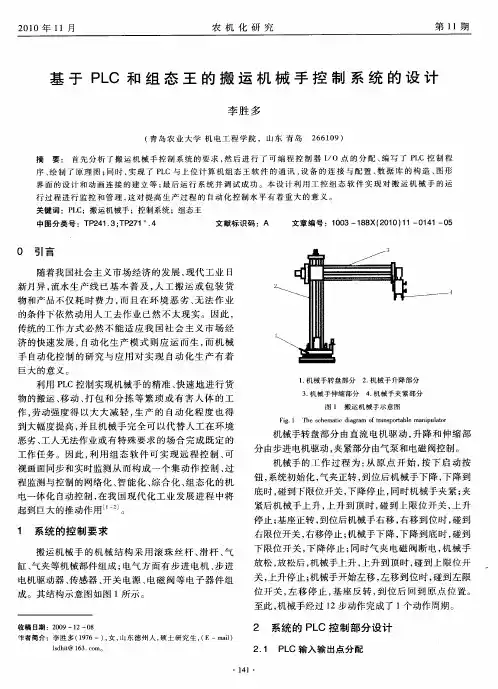
1 机械手的控制系统工作原理THFJX-1型机械手实物教学模型,其主体由底板、实验桌(型材结构)、旋转底盘、气动部分、手爪、三维(X、Y、Z)运动机械及电气控制等四部分组成。
气动部分由电磁阀与汽缸组成;三维运动机械部分是一个采用滚珠丝杠传动与齿轮传动相结合的模块化结构,用于实现定位功能。
电气控制是由西门子S7-200小型PLC、步进电机驱动电源模块、开关电源、光电传感器等器件组成。
基于组态王的机械手监控系统设计机械手监控系统是一种可以远程控制和监控机械手运行状态和操作的系统。
基于组态王开发的机械手监控系统可以通过可视化界面实时监控机械手的状态、控制机械手的动作和参数设置,提高机械手的操作效率和安全性。
首先,机械手监控系统需要具备实时监控机械手的功能。
通过连接机械手的传感器和执行器,可以实时获取机械手的位置、速度、力度等状态信息。
这些信息可以通过组态王进行可视化展示,如在界面上显示机械手当前的位置和姿态信息,实时监控机械手的运行状态。
同时,系统还可以设置机械手的报警功能,当机械手出现异常运行或超出设定的安全范围时,系统可以及时发送警报信息给操作人员,以确保操作的安全性。
其次,机械手监控系统需要具备远程控制机械手的功能。
通过组态王提供的控制接口,可以通过图形化界面实现对机械手的远程控制。
操作人员可以通过界面上的按钮、输入框等控件来控制机械手的运动,如设定目标位置、设定运动速度、设定抓取力度等。
同时,系统还可以记录操作人员的远程控制操作信息,便于追踪和分析问题。
再次,机械手监控系统需要具备参数设置和优化功能。
操作人员可以通过界面上的参数设置界面来调整机械手的运动参数,如速度、力度、加速度等。
系统可以根据机械手的实时状态信息和任务需求,自动优化机械手的运动参数,以提高运动效率和减小机械手对周围环境的影响。
最后,机械手监控系统应具备数据存储和分析功能。
系统可以将机械手的状态信息、操作记录和报警信息等进行存储和管理,以便后续分析和决策。
操作人员可以通过系统的数据分析功能,对机械手的运行情况进行统计和分析,发现问题和优化改进的方向。
总结起来,基于组态王的机械手监控系统设计需要具备实时监控、远程控制、参数设置和优化以及数据存储和分析等功能。
这些功能可以帮助操作人员实现对机械手的远程监控和控制,提高工作效率和安全性,同时也为机器人的优化改进提供了数据支持。
第1章绪论1.1 组态王软件简介本系统采集控制软件选用中国本土软件厂商北京亚控科技发展有限公司生产的,国内最早的商用组态软件“组态王” .截止到 2009 年底,“组态王”已在国内装机量有 10 万套,成功地应用于我国工业领域的各行各业,例如石油、化工、电力、冶金、造纸、橡胶、环保、机械制造等等,在中国使用的监控软件中,组态王拥有国内最多的用户.像国外众多的软件一样,组态王软件也经过了一个发展例程: 1995 年——组态王 V1.0,1996 年——组态王 V1.2 1997 年——组态王 V1.51,1998 年——组态王 V2.0,1999 年——组态王 V5.1, 2000 年——组态王 V5.1 for Internet,2001 年——组态王 V6.0、组态王电力专业版 6.0 ,2002 年——组态王 V6.02,2003 年——组态王 V6.5, 2005 年——组态王 V6.51,2006 年——组态王 V6.52,2007 年——组态王 V6.53.1.2 组态王的特点(1)丰富的I/O.将组态王和驱动程序整合在一起,通用性强,含有多种I/O驱动程序,能与较多的PLC通信,并且通信可靠.(2)报警和事件系统.组态王报警系统具有方便、灵活、可靠、易于扩展的特点.组态王分布式报警管理提供多种报警管理功能.包括:基于事件的报警、报警分组管理、报警优先级、报警过滤、新增死区和延时概念等功能,以及通过网络的远程报警管理.组态王还可以记录应用程序事件和操作员操作信息.报警和事件具有多种输出方式:文件、数据库、打印机和报警窗,并且可以利用控件等工具轻松浏览和打印报警数据库的内容.(3)安全系统.组态王采用分级和分区保护的双重保护策略,对新增用户组和安全区管理、999个不同级别的权限和64个安全区形成双重保护,另外组态王能记录程序运行中操作员的所有操作.1.3 用途在组态概念出现之前,要实现某一任务,都是通过编写程序(如使用BASIC , C ,FORTRAN等)来实现的.编写程序不但工作量大、周期长,而且容易犯错误,不能保证工期.组态软件的出现,解决了这个问题.对于过去需要几个月的工作,通过组态几天就可以完成.组态软件是有专业性的.一种组态软件只能适合某种领域的应用.组态的概念最早出现在工业计算机控制中.如DCS(集散控制系统)组态,PLC(可编程控制器)梯形图组态.人机界面生成软件就叫工控组态软件.其实在其他行业也有组态的概念,人们只是不这么叫而已.如AutoCAD,办公软件(PowerPoint)都存在相似的操作,即用软件提供的工具来形成自己的作品,并以数据文件保存作品,而不是执行程序.组态形成的数据只有其制造工具或其他专用工具才能识别.但是不同之处在于,工业控制中形成的组态结果是用在实时监控的.组态工具的解释引擎,要根据这些组态结果实时运行.从表面上看,组态工具的运行程序就是执行自己特定的任务.1.4 使用组态王软件开发具有以下几个特点(1)实验全部用软件来实现,只需利用现有的计算机就可完成自动控制系统课程的实验,从而大大减少购置仪器的经费.(2)该系统是中文界面,具有人机界面友好、结果可视化的优点.对用户而言,操作简单易学且编程简单,参数输入与修改灵活,具有多次或重复仿真运行的控制能力,可以实时地显示参数变化前后系统的特性曲线,能很直观地显示控制系统的实时趋势曲线,这些很强的交互能力使其在自动控制系统的实验中可以发挥理想的效果.第2章机械手系统的设计2.1机械手介绍机械手是一种能模拟人手臂的部分动作,按预定的程序、轨迹及其它要求,实现抓取、搬运工件或操纵工具的自动化装置.可编程控制器是以微处理技术为基础,综合计算机技术和自动控制技术发展起来的一种新型工业控制器.它在工业现场中对机械手能起到有效而灵活的控制.可编程控制器和监控系统的通讯,往往需要采用高级语言编程实现,对用户有着很高的要求.这需要用户必须熟悉互联的可编程控制器及其网络采用的通讯协议,严格按照通讯协议规定为计算机编写通讯程序.然而,用户希望监控系统具有界面简单、便于操作、实时性好、开发周期短和可移植性强等特点.组态技术在数据处理、网络通讯和图形界面等方面给监控系统提供了有力的支持.机械手首先是从美国开始研制的.1954年美国戴沃尔最早提出了工业机器人的概念,并申请了专利.该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现.这就是所谓的示教再现机器人.现有的机器人差不多都采用这种控制方式.1958年美国联合控制公司研制出第一台机械手铆接机器人.作为机器人产品最早的实用机型(示教再现)是1962年美国AMF公司推出的“VERSTRAN”和UNIMATION公司推出的“UNIMATE”.这些工业机器人主要由类似人的手和臂组成它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门.2.2 机械手控制要求分析分析机械手控制系统的控制要求.机械手具有启动、停止、移动、抓、放等功能.机械手操作人员可以通过启动、停止按钮来控制机械手的启动和停止.移动和抓、放功能通过内在程序自动完成.机械手的动作有如下过程:(1)当按钮启停调整为开始时,机械手开始动作.(2)机械手下放,(包括伸缩杆、抓)(3)机械手抓物体.(4)机械手与物体一起上台,(包括伸缩杆、抓、物体)(5)机械手与与物体一起平移,(包括伸缩杆、抓、物体)(6)机械手与物下放,(包括伸缩杆、抓、物体)(7)机械手上并回到原点第3章基于组态机械手系统设计3.1 组态在机械手中的应用组态软件又称上位机管理软件,广泛应用于工业领域,它提供了灵活的组态工具,人机交互界面好,能充分实现工业各领域的管理控制、数据采集、连续控制及统计过程控制.本次设计充分运用组态王的仿真功能实现人机的交流,以达到对机械手的控制.3.2 机械手的组态画面设计3.2.1 建立组态工程运行组态环境,在“组态王”工程管理器(Proj—Manager)选择选单“文件\新建工程”或单击“新建”按钮.在工程路径文本框中输入一个有效的工程路径,或单击“浏览⋯”按钮后在弹出的路径选择对话框中选择一个有效的路径.在工程名称文本框中输入工程的名称,该工程名称同时将被作为当前工程的路径名称.在工程描述文本框中输入对该工程的描述文字.工程名称长度应小于32个字节,工程描述长度应小于40个字节.单击“完成”完成工程的新建.3.2.2 定义数据变量数据库是”组态王”软件的核心部分,在工程管理器中,选择”数据库\数据词典”,双击”新建图标”,弹出”变量属性”对话框,创建机械手各个变量数据,数据变量是构成实时数据库的基本单元,建立实时数据库的过程也即定义数据变量的过程.定义数据变量的内容主要包括:指定数据变量名称、类型、初始值和数值范围,确定与数据变量存盘相关的参数,如存盘的周期、存盘的时间范围和保存期限等.数据对象有I/O 开关型、I/O数值型、I/O字符型、内存开关型等8种类型.不同类型的数据对象,属性不同,用途也不同.设计中的数据变量:开关(内存整数)、时间(内存整数)、垂直移动(内存整数)、水平移动(内存整数)、夹起(内存离散)、物块(内存整数)、物块水平(内存整数)、传送带(内存整数)、上(内存离散)、下(内存离散)、左(内存离散)、右(内存离散)、电机(内存离散).变量的设置如图3-1图3-1变量设置在基本属性页中输入变量名为“开关”,变量类型设置为“内存离散”,再点击确定按钮即完成第一个变量的定义.同理,还需要定义“上行下行”、“左行右行”、“物块的上行下行”,变量类型为“内存实数”等等.所有变量如图3-2图3-2变量设置3.2.3 系统界面设计在组态王平台上建立“机械手控制系统”窗口并设置好窗口属性.通过绘图工具箱中的工具,绘制出组建系统所需的各个元件,调用系统控件制作控制按钮,利用文字标签对相应元件进行注释.最后生成的整体效果图如图3-3所示:图3-3整体效果图3.2.4机械手的工作过程按下开始按钮装置开始工作,机械手首先做下降运动,待下降到位后,机械手张开手指抓取物品(抓紧物品时间由定时器确定);然后机械手上升到最上端(由上限位开关确定),再向右运动;到达右端后,机械手开始下降,下降到位后机械手松开,放下物品;再将机械手上升,如此循环提取物品.机械手工作过程流程如图3-4所示:图3-4机械手工作过程流程图3.2.5 控制系统程序的编程单击“变量【域】”按钮,弹出变量选择对话框,选择\\本站点\开关变量,再按“确定”按钮,自动输入“命令语言编辑器”区,在变量后输入“=1”即可,同理实现“停止”变量的等等.如图3-5图3-5应用程序命令语言3.2.6 动画连接由图形对象搭制而成的图形界面是静止不动的,需要对这些图形对象进行动画设计,真实地描述外界对象的状态变化,达到过程实时监控的目的.组态王实现图形动画设计的主要方法是将用户窗1:3中的图形对象与实时数据库中的数据对象建立相关性连接,并设置相应的动画属性.机械手水平移动与垂直移动的参数如下图3-6所示.图3-6机械手水平移动与垂直移动的参数夹子加紧与放松的参数如下图3-7所示.图3-7夹子加紧与放松的参数传送带旋转移动的参数如下图3-8所示.图3-8传送带旋转移动的参数开关按钮的参数如下图3-9所示.图3-9开关按钮的参数夹起指示灯的参数如下图3-10所示.图3-10夹起指示灯的参数3.2.7 系统的运行于调试机械手控制系统的界面设计、关联变量和程序编制完成后,就程序进行调试,最后完成的系统运行效果图如下图3-11、3-12图3-11系统运行效果图图3-12系统运行效果图总结课程设计主要内容:熟悉所用组态软件的操作、查看有关参考书籍、查阅相关文献资料、独立设计基于组态软件的机械手的控制方案、根据实际系统的要求,进行简单的画面设计与编辑,简单控制程序的编写,设定动画连接等功能、进行程序的运行,调试与改进.设计主要任务:了解机械手的控制要求、确定系统的控制方案、利用组态软件编制监控系统图形界面、建立实时数据库、画面的图形对象与数据库的数据变量之间的关系、编制程序实现对机械手以及物品的控制和监视.本次课程设计使我们加深了对组态软件的了解,熟悉组态软件对机械手控制系统的设计、画面的设计、参数变量的设定、程序的编制,运行,调试与改进、机械手控制系统的动画连接.本次课程设计的主要目的是:熟悉并熟练掌握组态王软件的功能和特点、掌握组态软件的系统构成、通过组态王软件的使用,进一步掌握了解机械手的工作原理、培养自主查找资料,搜索信息的能力、培养实践动手能力与合作精神.致谢本课程设计是在孟凡姿老师的精心指导下完成的.从做设计以来,我不仅在专业上有了很大进步,而且开阔了我的视野,明白了更多的知识.在此,我要向孟凡姿老师表示深深的敬意和衷心的感谢!孟老师严谨细致、一丝不苟的作风一直是我工作、学习中的榜样;孟老师循循善诱的教导和不拘一格的思路给予我无尽的启迪;这次设计的每个实验细节和每个结果,都离不开老师您的细心指导.此外,我在学习期间还得到许多同学、朋友的帮助,在此表示衷心的感谢!在这一周里有许多让我感动的事和让我感激的人.但由于时间的仓促和主客观条件的限制我们只是做出的演示,尽管有些不太完美的地方,但我们已经很努力了.最后祝愿老师们工作顺利,身体健康!祝愿同学们在新的学年取得新的好成绩,一切顺利!参考文献[1]廖常初.PLC编程及应用[M].北京:机械工业出版社,2004.198—210.[2]北京亚控科技有限公司.组态王电子参考手册EZ].2003.[3]吴明亮,蔡夕忠.可编程控制器实训教程[M].北京:化学工业出版社,2005.44—51.[4]Wonderware Corporation.In Touch 7.0 Advanced,Training Manual[z].1998.[5]常斗南.可编程控制其原理、应用、实验[M].北京:机械工业出版社,1998.l1O一132.[6]刘彬,杜金翔.关于建立PLC立体教学实验新体系的探讨[J].实验技术与管理,2005,22(8).[7]何立新.PLC控制技术实践教学的改革[J].实验室研究与探索,2005,24(52).30—32.。
基于组态王kingview6.53的机械手监控系统设计
摘要:
主要介绍了基于组态王Kingview6.53实现对机械手控制系统的动画设计,开发上位机监控界面。
组态王通过设备驱动程序从现场硬件设备获取实时数据并处理,以动画的方式在上位机屏幕上显示,同时按照组态要求和操作人员的指令使机械手按照设定的轨迹运行,并且将现场数据以报表的形式在监控界面中显示出来。
该系统可以很好的实现机械手的自动控制和管理。
关键词:机械手;S7-200 PLC;组态王
0 引言
在工业生产中,人们经常受到高温、腐蚀及各种辐射等因素的危害,增加了操作人员的劳动强度,甚至于危及生命。
机械手的问世,相应的各种难题迎刃而解。
本机械手控制系统采用THFJX-1型机械手实物教学模型。
用西门子S7-200 PLC 控制。
上位机监控系统采用组态王kingview6.53组态软件设计,组态王6.53是由亚控科技有限公司研制的组态软件,是运行于Microsoft Windows2000\XP 中文平台的中文界面的人机界面软件,为用户提供了解决实际工程问题的完整方案和开发平台,能够完成现场数据采集、实时和历史数据处理、报警和安全机制、流程控制、动画显示、曲线和报表输出、企业监控网络系统等功能。
通过对本监控系统的分析,主要实现了以下两个功能,一、充分利用了组态王的图形编辑功能,方便地构成监控画面,并以动画方式显示机械手的运行的状态二、生成实时报表和历史报表并保存到指定的文件夹下,还可以对指定的变量进行查询。
1 机械手的控制系统工作原理
THFJX-1型机械手实物教学模型,其主体由底板、实验桌(型材结构)、旋转底盘、气动部分、手爪、三维(X、Y、Z)运动机械及电气控制等四部分组成。
气动部分由电磁阀和汽缸组成;三维运动机械部分是一个采用滚珠丝杠传动和齿轮传动相结合的模块化结构,用于实现定位功能。
电气控制是由西门子S7-200小型PLC、步进电机驱动电源模块、开关电源、光电传感器等器件组成。
通过传感器信号采集,PLC编程,对步进电机、直流电机、电磁阀进行较复杂的开关量控制、位置控制、时序逻辑控制,实现对机械手在工作台面范围内物体抓取、移、放的功能。
具体的控制要求是:
(1)按下上电按钮后,机械手得电进入工作状态。
(2)按下复位按钮后,复位指示灯闪烁,不管机械手在什么位置,都将回到原始位置。
(3)按下启动按钮后,启动灯闪烁,当按下运行按钮时,机械手臂伸出→下移→抓紧→上升→手臂收入→左摆→伸出→下移→放开→上移→手臂收入→右摆,进行一次循环运行,最后回到原始位置,等待下一次运行启动。
2 输入输出端子分配
该机械手的控制为纯开关控制,且所需I/O点数不多,一共使用了9个输入量和9个输出量。
同时,为了确保今后系统的扩展,本系统采用性价比较高的西门子S7-200的CPU226CN模块,该模块是具有40个I/O 点,包括24个输入点和16个输出点。
其I/O分配如表1所示。
表1.PLC的I/O地址分配表
输入横轴正限位I0.0
输
出
横轴脉冲Q0.0 竖轴正限位I0.1 竖轴脉冲Q0.1 横轴反限位I0.2 横轴方向Q0.2 竖轴反限位I0.3 竖轴方向Q0.3 旋转脉冲I0.4 手正转Q0.4 手正转限位I0.5 手反转Q0.5 手反转限位I0.6 底座正转Q0.6 底座正限位I0.7 底座反转Q0.7 底座反限位I1.0 电磁阀动作Q1.0
3 系统组态设计及功能实现
下面介绍利用组态王kingview6.53对机械手控制系统进行组态的设计,其步骤如下:
(1)设备连接
打开组态王软件,进入工程管理器,新建一个工程,选择他的存储路径并设定项目名称为“机械手”。
进入工程浏览器后,首先进行设备的连接。
上位机COM1与PLC之间通过PC/PPI编程电缆连接,选择工程浏览器左侧大纲项“设备\COM1”,在工程浏览器右侧用鼠标左键双击“新建”图标,运行“设备配置向导”,相关配置如图1所示
图1 设备配置向导
(2)通讯设备参数设置
在组态王工程浏览器的工程目录显示区,点击“设备”大纲项下PLC 与上位计算机所连串口,进行参数设置。
PLC 的通信参数与组态王设置应一致,同时组态王系统的COM1口设置要与PLC 一致。
PLC 采用默认的通信参数[1]如下:波特率为9600bps,通信协议为PPI,模式为十一位。
(3)构造数据库
数据库是组态王软件的核心部分。
建立在数据库中的各种变量负责和各种外部设备进行数据交换, 以及相关数据的存储, 它将组态的工程的各个部分连接成有机的整体[2]。
选择工程浏览器左侧大纲项“数据库\ 数据词典”,在工程浏览器右侧用鼠标左键双击“新建”图标,弹出“变量属性”对话框,创建机械手控制系统各个变量数据。
这些变量与PLC 内部变量一一对应,PLC的输入输出完全由组态王内部变量代替。
通过建立动画连接,这样PLC的实际输入输出状态就以动画的形式都反映在组态监控界面上。
变量的定义如图2所示
图2 变量定义
(4)监控界面的设计和动画连接
进入组态王的开发系统,新建一个画面。
在画面上创建机械手控制示意图,画中主要绘制了机械手,开始/复位按钮和机械手位置指示灯。
除此之外,画面中还增加了实时报表和指定查询报表,在报表中插入要查询的变量,以便用户方存储和查看。
主画面如图3 所示
建立变量数据库中的变量与组态画面中各个对象间的联系,从而使画面能够根据实际数据的变化产生动画效果。
编写应用程序,用户定义类似C语言的命令语言来驱动应用程序。
下面是部分应用程序命令语言。
if(\\本站点\开关==1&&\\本站点\横轴反限位==1 &&\\本站点\竖轴反限位==1)
\\本站点\水平移动=\\本站点\水平移动+1;
if(\\本站点\水平移动>=100)
\\本站点\水平移动=100;
if(\\本站点\水平移动==100&&\\本站点\手正转限位==1&&\\本站点\手反转限位==1)
\\本站点\垂直移动=\\本站点\垂直移动+1;
if( \\本站点\垂直移动>=100)
\\本站点\垂直移动=100;
if(\\本站点\手正转限位==0&&\\本站点\手反转限位==0)
{
\\本站点\垂直移动=\\本站点\垂直移动-1;
\\本站点\木块垂直移动=\\本站点\木块垂直移动+1;
}
……
图3 机械手监控界面
(5) 系统运行
按照要求将上位机,PLC和机械手连接好以后,启动组态王运行系统TOUCHVIEW,运行机械手控制系统。
将PLC开关指向RUN状态,观察组态画面是否与机械手运行一致,,否则,检查组态画面动画隐含连接正确与否,直至组态动画正常运行为止。
4 设计过程遇到的问题及解决方法
组态监控过程中PLC 和计算机之间是通过RS232 串行口进行通信[3]的,实验室中的PLC 和编程软件STEP-7之间也是通过RS232 串行口进行通信的,同一时刻只能有一个设备使用RS232串行口,所以在PLC梯形图编辑完并下载到PLC上后,应断开编程软件STEP-7和PLC之间的通信,否则组态监控软件是无法对PLC中各个寄存器的状态进行采样监控的。
在进行监控界面的设计时,机械手的上移下移都很容易实现,但底座的旋转需要要考虑到视角的变化,因此需要设计多组横轴手臂,建立隐含连接。
对在条件符合时,对应的图像才会显现出来。
程序控制为:
if(\\本站点\水平移动==100&&\\本站点\垂直移动==0&&\\本站点\木块垂直移动==100)
{
\\本站点\隐含标志=1;
\\本站点\木块隐含标志=1;
}
if(\\本站点\下降按钮==1)
{
\\本站点\垂直移动1=\\本站点\垂直移动1+1;
\\本站点\木块垂直移动2=\\本站点\木块垂直移动2+1;
}
if(\\本站点\下降按钮==0&&\\本站点\木块垂直移动2==100)
\\本站点\垂直移动1=\\本站点\垂直移动1-1;
if(\\本站点\垂直移动1==0&&\\本站点\木块垂直移动2==100)
\\本站点\隐含标志=0
5 结束语
本机械手自动控制系统,其物理对象层控制采用西门子S7-200小型PLC是机械设备更灵活有效,动作准确,易于维护和扩展。
上位机监控软件采用组态王kingview6.53 组态软件开发,操作界面友好,自动化程度高,监控可靠[4]。
本机械手控制系统的研制,对工业现场货物的搬运具有较强的借鉴意义。
参考文献
[1] 廖常初.S7-200PLC编程及应用[M] 机械工业出版社2007
[2] 北京亚控科技发展有限公司,组态王Version6.53用户手册[M] 2007
[3] 霍俊仪袁长明世纪星组态软件在机械手控制中的应用[J] 2005
[4] 覃贵礼基于组态王Kingview6.53 在仿真机械手控制系统中的实现[J] 2009。