第七章-相角控制器
- 格式:doc
- 大小:692.50 KB
- 文档页数:23
应用记录8位单片微控制器空间相位调制介绍uPD78F0988AuPD78F0988uPD78F0986uPD78F0984uPD78F0983uPD78F0982版次:U16699EE1V1AN00印刷日期:May 2004NEC Corporation 2004德国印制• 本文档信息于2004年4月28日开始使用。
文档的内容可能会做修改。
如果用户要进行实际的设计请参考最新出版的NEC 数据表或数据手册等,以获取NEC半导体产品的最新规定,并非所有产品在每个国家都能使用。
请联系NEC销售代理,了解使用信息和其他相关信息。
•未经NEC书面许可,不能对本文档复制。
本文档出现的任何错误,NEC不承担责任。
• 如果用户在使用本文档列出的NEC半导体产品或通过其他途径使用这些产品时,产生了侵犯专利、版权和其他知识产权,NEC没有以许可、明示、暗示及其它任何方式授权。
• 文档中的电路、软件和其他相关信息的描述,用来说明半导体产品操作和应用的例子。
客户在使用这些电路、软件和信息时负全责。
客户和第三方在使用这些电路、软件和信息时造成的损失,NEC不承担责任。
• NEC尽量提高半导体产品的质量、可靠性和安全性,但请客户理解错误是不可能完全避免的。
为了尽可能减少NEC半导体产品所带来的个人财产及人身安全(包括死亡)的风险,客户在设计中应加强安全措施,如容错、耐火性和自检等。
• NEC半导体产品分为一下三个质量等级:标准:计算机,办公设备,通信设备,测试设备,视频音频设备,家用电子产品,机械工具,个人电子设备和工业机器人。
专业:运输设备(汽车,火车,轮船等),交通控制系统,防灾系统,反犯罪系统,安全设备和医疗设备(不是专用与生命救护的设备。
)特级:飞机,航空设备,水下中继器,核反应堆控制系统,生命救护系统和用于生命救护的医疗设备等。
除非在NEC数据表或数据手册中特别规定,一般的NEC产品的质量登记都是“标准”的。
如果客户希望不是在NEC要求的环境中使用NEC半导体产品,必须事先与销售代理联系,以确定NEC 是否支持该应用环境。
三相角度控制器工作原理
三相角度控制器的工作原理如下:
在三相交流电源系统中,通过控制电压或电流的相位角度,可以实现对负载的控制。
三相角度控制器通过改变三相交流电的相位角度来控制负载的电压或电流。
三相角度控制器通常由一个触发电路、一个控制电路和一个功率调节器组成。
首先,输入的三相交流电信号通过触发电路将其转换为三个脉冲信号(相位差均为120度),用来控制后续的控制电路。
然后,控制电路根据所需的控制模式(如相角控制、电压控制或电流控制)生成控制信号。
这些控制信号将与脉冲信号进行比较,以确定何时打开或关闭功率调节器。
最后,功率调节器根据控制信号的状态打开或关闭相应的晶闸管或三极管,来控制负载电压或电流的相位角度。
当晶闸管或三极管导通时,电流可以通过负载流过,而当它们截止时,电流无法通过负载,从而控制负载的电压或电流。
通过不断调整触发电路、控制电路和功率调节器的参数,可以实现对负载的精确控制,实现各种控制要求下的稳定运行。
相位角控制器原理相位角控制器,这名字听起来是不是有点高大上?其实呀,它的原理没那么神秘啦。
咱先从电说起吧。
电就像一个调皮的小精灵,在电路里跑来跑去的。
相位呢,就好比是这个小精灵在某个时刻的状态。
想象一下,一群小电精灵在电路里开派对,它们不是杂乱无章的,而是有着一定的规律。
相位角就是描述这个规律的一个关键因素。
相位角控制器就像是这个派对的管理员。
它的主要工作就是控制电精灵们的相位角。
那它怎么做到的呢?在电路里,有各种各样的元件。
相位角控制器就是巧妙地利用这些元件的特性来工作的。
比如说电感和电容,这俩家伙可神奇了。
电感就像一个慢性子的朋友,它会阻碍电流的快速变化,而电容呢,就像是一个急性子,它能快速地储存和释放电荷。
当相位角控制器开始工作的时候,它就像是在指挥一场交响乐。
如果它想让相位角变大,它可能就会让电感这个慢性子发挥更大的作用。
就好比在交响乐里,让小提琴拉得慢一点,这样整个曲子的节奏就变了。
电感会让电流的变化滞后,从而改变相位角。
相反,如果要让相位角变小,它可能就会借助电容这个急性子。
电容快速地充电和放电,就像在交响乐里让鼓敲得更紧凑一些,让整个节奏加快,电流的变化就会提前,相位角也就变小了。
而且呀,相位角控制器还和交流电有着千丝万缕的关系呢。
交流电不像直流电那么老实,它的电压和电流是一直在变化的,就像海浪一样,一波一波的。
相位角控制器在交流电的电路里,就像是在海浪里掌舵的船长。
它根据需要,调整着相位角,让电路里的各种设备都能好好工作。
比如说在一些电机的控制中,相位角控制器可就太重要了。
电机就像一个大力士,但是这个大力士要想发挥出最大的力量,就得按照正确的节奏来。
相位角控制器就负责给电机调整这个节奏。
如果相位角不对,电机可能就会像一个没睡醒的大力士,有气无力的,转得很慢,还可能会发热,就像大力士累得气喘吁吁一样。
再说说在照明系统里吧。
现在有很多智能照明系统,相位角控制器也能在里面大展身手。
它可以根据环境的亮度、人们的需求等,调整灯光的相位角,从而改变灯光的亮度。

针对目前控制器普通版本和标准版本需要对相序给出常规接法(智能自学习版本无需对相序), 无刷电机为3相6拍控制,因此3根霍尔状态对应3根电机线6 种输出状态,不同组合有36种接法,其中有6种接法能让电机运转正常,且这6 种接法里有3种接法是正转另3种接法是反转。
所以我们有必要掌握接线规则。
-:首先我们得让电机正常转起来,通常是霍尔插头直接插上,调整电机线。
以下给出6种规律接法,必定有1种能让电机运转正常1》电机线蓝色对控制器蓝色电机线绿色对控制器绿色电机线黄色对控制器黄色2》电机线蓝色对控制器蓝色电机线绿色对控制器黄色电机线黄色对控制器绿色3》电机线黄色对控制器黄色电机线蓝色对控制器绿色电机线绿色对控制器蓝色4》电机线绿色对控制器绿色电机线蓝色对控制器黄色电机线黄色对控制器蓝色5》电机线蓝色对控制器黄色电机线黄色对控制器绿色电机线绿色对控制器蓝色6》电机线黄色对控制器蓝色电机线蓝色对控制器绿色电机线绿色对控制器黄色总结以上规律我们可以编出一套顺口溜方便记忆—般控制器是放在上方的,电机是放在下方的,我们可以这么记忆1》颜色对颜色2》蓝对蓝,其它2色对调3》黄对黄,其它2色对调4》绿对绿,其它2色对调5》上蓝对下黄,其它2色对调6》上黄对下蓝,其它2色对调霍尔有正有反,说明该电机是60。
相位角,没有正反就是120。
相位角。
你可按原样放入(可稍稍用502瞬间胶固定)将三个霍尔的正极和负极分别并联后与电机引出线中细的红、黑线相连焊接(注意绝缘)将三个霍尔的信号线分别与电机引出线中细的黄、绿,蓝线相连焊接(注意绝缘I二:以上接法能让电机运转正常,但不一定是正转,如果你要调成正转可将电机线A相C相对调,霍尔线A相B相对调。
无刷电机相角的判断无刷电机的相角是无刷电机的相位代数角的简称,指无刷电机各线圈在一个通电周期里面线圈部电流方向改变的角度。
电动车用无刷电机常见的相位代数角有120°与60°两种。
无刷电机的接线方法本页仅作为文档封面,使用时可以删除
This document is for reference only-rar21year.March
无刷电机的接线方法
如图4—11所示,无刷电机的线圈引线有3根,霍耳引线有5根,这8根引线必须和控制器相应引线一一对应,否则电机不能正常转动。
一服来讲,
60。
和120。
相角的无刷电机,需要由与之相对应的60。
和120。
相角的无刷电机控制器来驱动,两种相角的控制器不能直接互换。
60。
相角的无刷电机与60。
相角控制器相连的8根线的正确接线有两种,一种正转,一种反转。
因为对于120。
相角的无刷电机,通过调整线圈引线的相序和霍耳引线的相序,电机与控制器相连的8根线的正确接线可以有6种其中3种接法电机正转,6外3种接法电机反转。
如果无刷电机反转,表明无刷控制器与无刷电机的相角是匹百的,我们可以这样来调整电机的转向:将伺服电机与无刷控制器的霍耳引线的A、c交换接线;同时将无刷电机与无刷控制器的主相当A、B交换接线。
注:目前市场上已经出现了智能无刷控制器,这种智能无刷控为器具有自动识别电机相角的功能,能同时实现60。
和120。
两种相只的无刷电机的驱动。
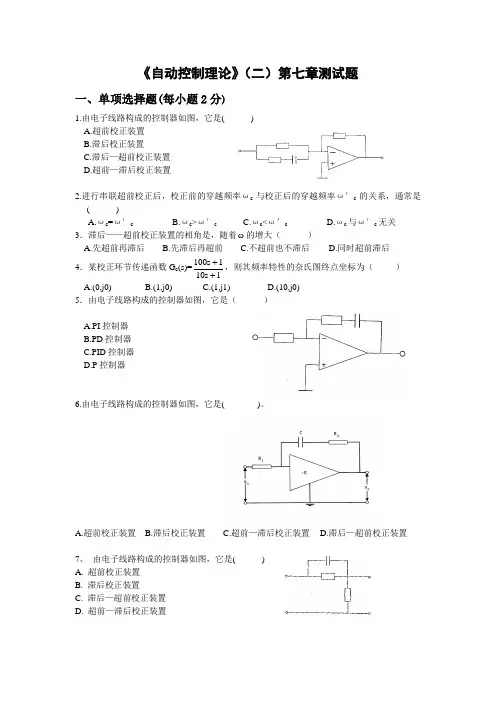
《自动控制理论》(二)第七章测试题一、单项选择题(每小题2分)1.由电子线路构成的控制器如图,它是( )A.超前校正装置B.滞后校正装置C.滞后—超前校正装置D.超前—滞后校正装置2.进行串联超前校正后,校正前的穿越频率ωc 与校正后的穿越频率ω′c 的关系,通常是( )A.ωc =ω′cB.ωc >ω′cC.ωc <ω′cD.ωc 与ω′c 无关3.滞后——超前校正装置的相角是,随着ω的增大( )A.先超前再滞后B.先滞后再超前C.不超前也不滞后D.同时超前滞后4.某校正环节传递函数G c (s)=1s 101s 100++,则其频率特性的奈氏图终点坐标为( ) A.(0,j0) B.(1,j0) C.(1,j1) D.(10,j0)5.由电子线路构成的控制器如图,它是( )A.PI 控制器B.PD 控制器C.PID 控制器D.P 控制器6.由电子线路构成的控制器如图,它是( )。
A.超前校正装置B.滞后校正装置C.超前—滞后校正装置D.滞后—超前校正装置7、 由电子线路构成的控制器如图,它是( )A. 超前校正装置B. 滞后校正装置C. 滞后—超前校正装置D. 超前—滞后校正装置8. 进行串联滞后校正后,校正前的穿越频率ωC 与校正后的穿越频率C ω'的关系,通常是( )A. ωC =C ω'B. ωC >C ω'C. ωC <C ω'D. ωC 与C ω'无关9.滞后—超前校正装置的奈氏曲线为( )A.圆B.上半圆C.下半圆D.45°弧线10.设有一单位反馈控制系统,其开环传递函数为G 0(s)=2)s(s 40+,若要求相位裕量≥50°,最为合适的选择是采用( )A.滞后校正B.超前校正C.滞后-超前校正D.超前-滞后校正11.某串联校正装置的传递函数为G c (S)=KS S T 1T 1+β+(0<β<1),则该装置是( ) A.超前校正装置B.滞后校正装置C.滞后——超前校正装置D.超前——滞后校正装置12.超前校正装置的频率特性为)1(j T 1j T 122>βω+ωβ+,其最大超前相位角Φm 为( )。
§ 1 PID控制简介目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口。
控制器的输出经过输出接口﹑执行机构,加到被控系统上;控制系统的被控量,经过传感器,变送器,通过输入接口送到控制器。
不同的控制系统,其传感器﹑变送器﹑执行机构是不一样的。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,各大公司均开发了具有PID参数自整定功能的智能调节器,其中PID控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
有利用PID控制实现的压力、温度、流量、液位控制器,能实现PID控制功能的可编程控制器(PLC),还有可实现PID控制的PC系统等等。
1.1 开环控制系统开环控制系统是指被控对象的输出(被控制量)对控制器的输出没有影响。
在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
1.2 闭环控制系统闭环控制系统的特点是系统被控对象的输出(被控制量)会反送回来影响控制器的输出,形成一个或多个闭环。
闭环控制系统有正反馈和负反馈,若反馈信号与系统给定值信号相反,则称为负反馈,若极性相同,则称为正反馈,一般闭环控制系统均采用负反馈,又称负反馈控制系统。
1.3 阶跃响应阶跃响应是指将一个阶跃输入加到系统上时,系统的输出。
稳态误差是指系统的响应进入稳态后,系统的期望输出与实际输出之差。
控制系统的性能可以用稳、准、快三个字来描述。
稳是指系统的稳定性,一个系统要能正常工作,首先必须是稳定的,从阶跃响应上看应该是收敛的;准是指控制系统的准确性、控制精度,通常用稳态误差来描述,它表示系统输出稳态值与期望值之差;快是指控制系统响应的快速性,通常用上升时间来定量描述。
虚拟同步发电机的相角控制方法李旭;丁勇;李勇;刘为群【摘要】Virtual synchronous generator ( VSG ) technology simulates the characteristics of the synchronous generator by power conversion system (PCS). Thus, the converter will have the characteristics of the synchronous generator such as primary frequency regulation, primary voltage regulation, damping and inertia. So the voltage and frequency regulation ability of converter for power grid will be enhanced. It can also help to improve the friendliness of grid-connection. In this paper, a new rectification method for phase angle and frequency of VSG based on phase locked loop (PLL) is proposed. The unreasonable deviation of frequency and phase is corrected in the process of starting grid connection and in the condition of strong disturbance, to reduce the oscillation and out-of-control risk under the above conditions. Finally, some experimental tests are given for correctness verification of the proposed method.%虚拟同步发电机技术利用电力电子变换器模拟同步发电机的特性,使变流器具有同步发电机一次调频、一次调压、阻尼及惯性等特性,增强了变流器对电网电压及频率的支撑作用,提高了电网接入的友好性。
第七章-相⾓控制器第7章静⽌电压、相⾓调节器:TCVR和TCPAR7.1 静⽌电压、相⾓调节器的作⽤在并联补偿叙述中所推导的基本式(5-3)和式(5-4),已为分析线路传输的有功功率P和线性⽆功功率Q提供了基本的计算⽅法。
显然,有功功率和⽆功功率都是关于传输线路阻抗、端电压幅值和两个系统电源相位差的函数。
由前⾯的讨论可知,若增加系统传输的有功功率,将不可避免地增加送端母线上⽆功输出的需求,同时也会增加整个传输线路的电压波动。
此外,前⾯还讨论了如何控制系统传输电压,以及如何从根本上解决电压波动和⽆功需求之间的变化。
实践证明,尽管有功功率的需求会经常发⽣变动,但采⽤可控⽆功补偿仍然是维持传输线电压稳定的有效⽅法。
⼀般来说,当中压输电系统或配⽹负荷出现波动时,对⼤电⽹采⽤可控并联⽆功补偿来维持电压稳定,也是⼀种⾏之有效的⽅法。
例如在⼤容量传输系统中,当涉及到⾼压⽹络与较低电压等级⽹络的互连时,这个⾼压电⽹的电压会因为季节性或⽇负荷的变化产⽣波动。
有时在需要增加传输功率时,在⾼低压⽹络之间通常⽤⼀个有载调压的机械抽头来调节电压,这种抽头可以将低压线路与⾼压电⽹隔离。
类似地,基于有载调压构成的电压调节器在早期的交流传输系统中就已得到应⽤,并已证明它在输电线路电压波动和负载变化时能维持电压的稳定,或达到⽤户所需的要求。
此外,有载调压也常⽤于对⽹络⽆功潮流的控制。
由于传输⽹络的阻抗主要是感性的,所以当传输线路中注⼊同相电压分量时,就会产⽣⼏乎与电压正交的⽆功电流,通过适当极性和幅值控制,也可⽤它来改善线路中的⽆功潮流。
尽管有载调压同样具有⽆功补偿和电压调节的传输控制功能,但它与常规的⽆功补偿之间在运⾏⽅式上有明显的区别。
⽆功补偿器是向交流系统提供或从交流系统吸收⽆功功率,以改变传输线路的⽆功潮流,因⽽也间接地控制传输⽹络的电压;⽽采⽤有载调压实现的电压调节器则⽆法提供或吸收⽆功功率,它只是设法直接控制传输线路⼀端的电压,通过系统本⾝提供所需要的⽆功功率来维持系统电压。
第7章静止电压、相角调节器:TCVR和TCPAR7.1 静止电压、相角调节器的作用在并联补偿叙述中所推导的基本式(5-3)和式(5-4),已为分析线路传输的有功功率P和线性无功功率Q提供了基本的计算方法。
显然,有功功率和无功功率都是关于传输线路阻抗、端电压幅值和两个系统电源相位差的函数。
由前面的讨论可知,若增加系统传输的有功功率,将不可避免地增加送端母线上无功输出的需求,同时也会增加整个传输线路的电压波动。
此外,前面还讨论了如何控制系统传输电压,以及如何从根本上解决电压波动和无功需求之间的变化。
实践证明,尽管有功功率的需求会经常发生变动,但采用可控无功补偿仍然是维持传输线电压稳定的有效方法。
一般来说,当中压输电系统或配网负荷出现波动时,对大电网采用可控并联无功补偿来维持电压稳定,也是一种行之有效的方法。
例如在大容量传输系统中,当涉及到高压网络与较低电压等级网络的互连时,这个高压电网的电压会因为季节性或日负荷的变化产生波动。
有时在需要增加传输功率时,在高低压网络之间通常用一个有载调压的机械抽头来调节电压,这种抽头可以将低压线路与高压电网隔离。
类似地,基于有载调压构成的电压调节器在早期的交流传输系统中就已得到应用,并已证明它在输电线路电压波动和负载变化时能维持电压的稳定,或达到用户所需的要求。
此外,有载调压也常用于对网络无功潮流的控制。
由于传输网络的阻抗主要是感性的,所以当传输线路中注入同相电压分量时,就会产生几乎与电压正交的无功电流,通过适当极性和幅值控制,也可用它来改善线路中的无功潮流。
尽管有载调压同样具有无功补偿和电压调节的传输控制功能,但它与常规的无功补偿之间在运行方式上有明显的区别。
无功补偿器是向交流系统提供或从交流系统吸收无功功率,以改变传输线路的无功潮流,因而也间接地控制传输网络的电压;而采用有载调压实现的电压调节器则无法提供或吸收无功功率,它只是设法直接控制传输线路一端的电压,通过系统本身提供所需要的无功功率来维持系统电压。
如果电网无法提供所需的无功功率,将可能发生系统的电压崩溃,这已是广为人知的事实。
例如,在超负荷运行的传输系统中,为最大限度地减小大电机负载造成的电压降,有载调压装置实施升压调节,以减小电压降的幅值,这时传输网络必须在降低功率因数的情况下提供所增加的负载电流。
这毫无疑问会进一步造成传输电压的降低,从而导致线路电流的进一步增加,直到最终发生电压崩溃、继电器将负载切除为止。
尽管如此,本章和随后章节仍将讨论有载调压和其它类似控制设备,毕竟它们在潮流控制中能够起到非常重要的作用,而这种作用就体现在它们所发挥出的电压调节和无功补偿的重要功能上。
第6章主要讨论了串联无功补偿对传输功率的控制,这种串联补偿是控制线路潮流和改善电力系统动态行为的有效方法。
但在一般情况下,串联无功补偿仅在潮流控制方面才能体现它的效果,而在其它的应用中可能不太适合,也可能很麻烦,或者没有经济效益,这些都与传输角有关。
例如,传输角可能与给定线路的要求不一致时,或者为了维持某些受到影响线路中的潮流时,这个传输角可能会随着日负荷或季节性负荷的变化在很大范围内变化,其它问题还包括对网孔环流的有功和无功功率的控制。
要解决这类问题,通常应对传输角进行有效控制,即对式5-3和5-4中的传输角 进行控制,这个角度应是在相关应用环境下传输线路或传输网络的实际角度。
机械式相角调节器(PAR)或移相变压器(PST)采用有载调压抽头向电网注入一个正交电压来实现其功能,这些设备在20世纪30年代曾用来解决潮流控制和提高传输效率等问题。
注入同相电压的有载调压通过调节电压幅值来控制无功功率,而注入正交电压的有载调压则通过相位调节来实现对有功功率的控制,它们的组合就能实现有功功率和无功功率的控制。
因此,历史上PAR早就用于改变电流的流向,减少互联系统的内在环流,因此也能改善和平衡互联传输系统的负载。
除了稳态电压和潮流控制外,具有高速电气控制的现代电压和相角调节器也已扩展到处理系统动态方面的问题。
这些调节器潜在的应用范围包括:瞬态稳定性的改善、功率振荡的抑制、减小超负荷运行造成的扰动,并减少由此产生的电压波动。
与无功功率补偿器相比,电压和相角调节器在动态控制方面还引入了新的功能,即它们具有有功功率交换的能;而采用抽头调节的传统变压器,它对电压和相角的调节不具备无功补偿器的功能,因而它不能够提供或吸收无功功率,所以这一任务只有靠电力系统本身去平衡。
为了了解电压和相角调节器的基本原理,以下将首先回顾一下电压和相角调节器的基本原理,并建立用电力电子技术实现其相应功能的必要基础。
在此基础之上,还将进一步分析相角控制器在确定的最大传输功率时对某些因素产生的影响,这些因素包括稳态传输极限、功率振荡阻尼等。
7.1.1电压和相角调节电压和相角调节的基本概念是在母线端电压上加上适当的同相或正交电压分量,从而使母线电压的幅值能产生±∆U的变化,或使相角发生相应变化,使之达到某一特定值或为所期望的数值。
因此,欲实现端电压调节,理论上可以将一个电压幅值可控的同相电压源串接在交流系统中,这样即可完成相应的功能,如图7-1a所示。
图7-1b为这种电压调节的一般原理。
由图可见,电压的调节是通过串联到线路中三相调节或励磁变压器原边的抽头变化来实现的。
由图7-1c所示的矢量图中可明显看出,注入的电压±∆U a、±∆U b和±∆U c与相电压u a、u b和u c同相。
在变压器每相串联的两个绕组中,有载调压绕组的一端一般与它们的中性点连接在一起。
类似地,图7-1a的电路结构也可以用来表示相角控制器,只是它的注入电压∆U与系统电压的相位差为±90°,图7-2a即为对应的图示及矢量。
采用这种调节方式就能使注入电压改变系统电压的相角。
图7-2b为相角控制的一种可能结构,对应的矢量关系可用图7-2c来表示。
当对注入电压矢量在较小的角度范围内进行调节时,在保持电压幅值基本不变的情况下,角度变化量与注入电压近似为线性关系。
但当被调节的角度在很大范围内变化时,系统电压的幅值将会显著增加,正是由于这个原因,具有这种特性的变压器常被称之为正交调压变压器(QBT)。
若对变压器的绕组结构进行较为复杂的设计,也可在进行相角调节时维持电压的幅值不变,即保证电压幅值与角度调节无关。
由于QBT接法相对简单,因而在传统的移相设备中,QBT能得到广泛的应用。
图7-1 电压调节器的基本概念和实现方法图7-2 相角调节器的基本概念和实现方法7.1.2 相角调节器对潮流控制的基本概念在实际的电力系统中,传输线路的最优负荷并不一定总是取决于主传输角。
例如,在两条不同电气长度的并行功率传输中,或传输线两端母线的主相位差不足以建立所希望的潮流时,就有可能出现这样的情况。
但此时若采用相角调节器(PAR )来解决这类问题,就可能达到控制目的。
图7-3b 所示为相角调节器对潮流进行控制的基本原理,该系统中同样采用了常用的两机系统模型。
由图可见,相角调节器串接在发电机输出母线与传输线之间。
理论上讲,相角调节器可看成是一个幅值和相角均可控的正弦波电压源。
因此,可以认为发电机输出母线上输出的实际总电压u seff 是母线输出的端电压U s 和相角调节器(PAR )输出电压U σ的矢量和,图7-3b 给出了对应的电压矢量图。
对于一个理想的相角调节器来说,U σ相对于U s 的变化只是相位σ的变化,而且相角的变化不会导致电压幅值的变化,对应的幅值和相位关系可表示为σs seff U U U += 和 U U U s s e f f ====s s e f f U U (7-1)独立相角调节器的含义就是在预先确定的运行范围内使传输功率保持在所需的水平,它不应受到主传输角δ的影响。
例如,通过控制正交电压U σ的幅值,使输送功率在传输角超过它的最大传输角π/2时,仍能保持它的最大传输功率不变,就好像系统送端与受端电压矢量的有效相位差(δ-σ)仍维持在π/2不变。
尽管相角调节器本质上并没有增加稳态传输功率的极限,但根据这一思想,将有可能显著提高传输的实际功率。
根据式(7-1)的相角控制原理可以认为,有效相位就变为传输线送受端电压矢量之间的相位差(δ-σ),因而受端的传输功率P 和无功功率Q 可简单地表示为)sin(2σδ-=XUP (7-2) [])cos(12σδ--=X UQ (7-3)图7-3 a)相角调节器的两机系统 b)矢量图 c)传输特性图7-3c 表示了有功功率P 、δ和σ角的对应关系。
从图中可以观察到,尽管相角调节器对无补偿的传输线路并没有增加传输功率的极限,但从理论上来讲,它能使传输角δ在π/2<δ<π/2+σ范围内任意变化,并能保持最大的输出功率,相当于将P -δ特性整体向右移动了σ角度。
当然,当相角调节器注入的电压极性为正时,也会导致P -δ特性曲线向左移动,此时相角调节器也能增加传输功率,而且是在发电机转角δ小于π/2时达到最大值,即在δ =π/2-σ时达到最大值。
从图中还可以观察到,在同一传输角下,系统传输的有功功率P 和无功功率Q 的关系与没有线路补偿的7-3c 传输特性是一样的。
如果U σ与U s 之间的夹角固定为±90°,则相角调节器变成一个正交调压器(QB),它们之间的关系可表示为σs seff U U U += 与 22σU U U s s e f f +==s e f f U (7-4) 在正交型相角调节器的调压传输中,根据图7-4a 的矢量关系和式(7-1)中对有关电压符号所表达的意义,可推得有功功率P 的表达式为⎪⎭⎫ ⎝⎛+=δδσcos sin 2U U X U P (7-5)图7-4 正交调压器的矢量图和传输特性式7-5即为有功功率P 作为δ和注入正交电压U σ的函数关系,图7-4同时也给出了正交调压器的传输特性。
显然,相对于合适的相角调节器而言,由于正交调压器增大了送端有效电压的幅值,因此,正交调压器的最大传输功率将随着注入电压U σ的增加而增加。
与前面所介绍的并联和串联补偿方式相比,相角调节器更多的是用于处理有功和无功功率的问题。
电压型相位角调节器的总容量S PAR 一般可表示为I U I U S PAR σσ=⋅=⋅-=I U U s seff (7-6)该式表明,相角调节器的额定容量应由最高注入电压与连续线路电流的乘积来确定。
7.1.3 有功和无功环路潮流的控制首先考察图7-5a 中由一条传输线连接的送端s 和受端r 所组成的两机系统,传输线的感抗为X ,电阻为R ,有功潮流P 由s 端向r 端传送。
如图7-5b 所示,由于传输线路存在阻抗,使得送端电压矢量U s 和受端电压矢量U r 之间不仅有一个幅值差,而且两矢量间还存在相位差。