大学生电子设计竞赛I题可见光室内定位装置
- 格式:doc
- 大小:197.25 KB
- 文档页数:5
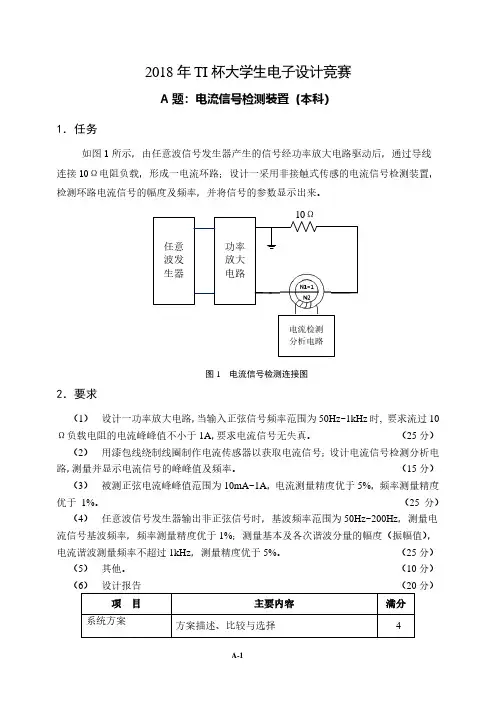
2018年TI杯大学生电子设计竞赛A题:电流信号检测装置(本科)1.任务如图1所示,由任意波信号发生器产生的信号经功率放大电路驱动后,通过导线连接10Ω电阻负载,形成一电流环路;设计一采用非接触式传感的电流信号检测装置,检测环路电流信号的幅度及频率,并将信号的参数显示出来。
图1 电流信号检测连接图2.要求(1)设计一功率放大电路,当输入正弦信号频率范围为50Hz~1kHz时, 要求流过10Ω负载电阻的电流峰峰值不小于1A,要求电流信号无失真。
(25分)(2)用漆包线绕制线圈制作电流传感器以获取电流信号;设计电流信号检测分析电路,测量并显示电流信号的峰峰值及频率。
(15分)(3)被测正弦电流峰峰值范围为10mA~1A,电流测量精度优于5%,频率测量精度优于1%。
(25分)(4)任意波信号发生器输出非正弦信号时,基波频率范围为50Hz~200Hz,测量电流信号基波频率,频率测量精度优于1%;测量基本及各次谐波分量的幅度(振幅值),电流谐波测量频率不超过1kHz,测量精度优于5%。
(25分)(5)其他。
(10分)(6)设计报告(20分)项目主要内容满分系统方案方案描述、比较与选择 4理论分析与计算电流测量方法谐波分量测量方法5 电路设计电路设计 5测试方案与测试结果测试方案测试结果完整性测试结果分析4设计报告结构及规范性摘要、报告正文结构、公式、图表的完整性和规范性2 总分203.说明(1)为提高电流传感器的灵敏度,可用用漆包线在锰芯磁环上绕制线圈,制作电流传感器。
(2)在锰芯磁环上绕N2匝导线,将流过被测电流的导线从磁环中穿过(N1=1),构成电流传感器。
2018年TI 杯大学生电子设计竞赛B 题:灭火飞行器(本科)1.任务基于四旋翼飞行器设计一个灭火飞行器(简称飞行器)。
飞行器活动区域示意图如图1所示。
在图1中,左下方的圆形区域是飞行器起飞及降落点;右侧正方形区域是灭火防区,防区中有4个用红色LED 模拟的火源(火源用单只0.5W 红色发光二极管来实现,建议LED 电流不超过25mA )。
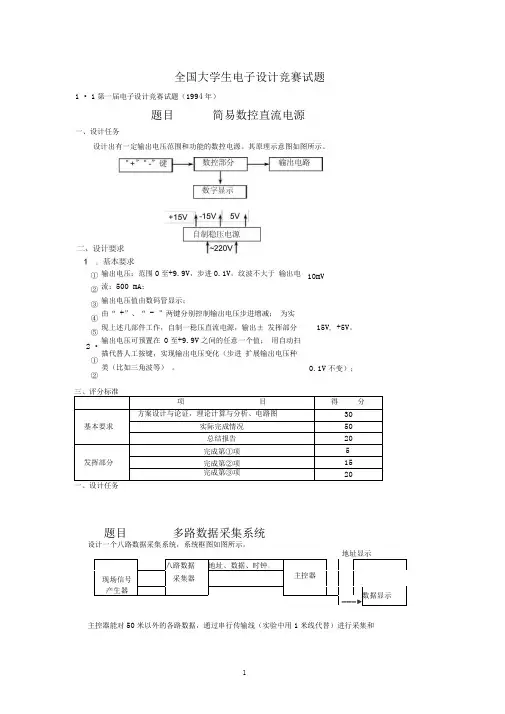
全国大学生电子设计竞赛试题1 • 1第一届电子设计竞赛试题(1994年)一、设计任务设计出有一定输出电压范围和功能的数控电源。
其原理示意图如图所示。
项目 得 分基本要求方案设计与论证,理论计算与分析、电路图30 实际完成情况 50 总结报告 20 发挥部分完成第①项5 完成第②项15 完成第③项20设计一个八路数据采集系统,系统框图如图所示。
八路数据 地址、数据、时钟,现场信号 产生器采集器主控器数据显示--- ►主控器能对50米以外的各路数据,通过串行传输线(实验中用1米线代替)进行采集和题目简易数控直流电源① ② ③④⑤2 •①②③ 输出电压:范围0至+9.9V ,步进0.1V ,纹波不大于 输出电流:500 mA ;输出电压值由数码管显示; 由“ +”、“ - ”两键分别控制输出电压步进增减; 为实现上述几部件工作,自制一稳压直流电源,输出± 发挥部分 输出电压可预置在 0至+9.9V 之间的任意一个值; 用自动扫描代替人工按键,实现输出电压变化(步进 扩展输出电压种类(比如三角波等) 。
10mV 15V , +5V 。
0.1V 不变);题目多路数据采集系统现场模拟信号产生器。
八路数据采集器。
主控器。
二、设计要求1.基本要求①现场模拟信号产生器自制一正弦波信号发生器,利用可变电阻改变振荡频率,使频率在200Hz至2kHz范围变化,再经频率电压娈换电路后输出相应1V至5V直流电压(200Hz 对应1V, 2kHz 对应5V)②八路数据采集器数据采集器第一路输入自制1V至5V直流电压,第2至7路分别输入来自直流源的5, 4, 3, 2, 1 , 0V直流电压(各路输入可由分压器产生,不要求精度)第八路备用。
将各路模拟信号分别转换成八位二进制数字信号,再经并/串变换电路,用串行码送入传输线路。
③主控器主控器通过串行传输线路对各路数据进行采集和显示。
采集方式包括循环采集(即1路、2路、…、8路、1路…)和选择采集(任选一路)二种方式。
2019年全国大学生电子设计竞赛试题参赛注意事项(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
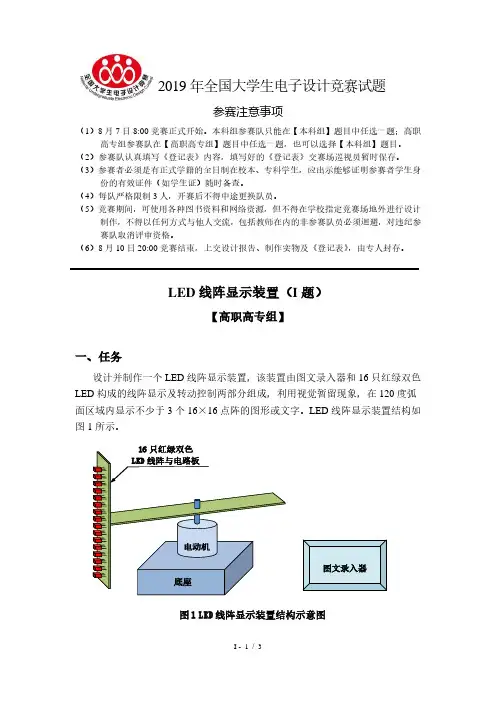
LED 线阵显示装置(I题)【高职高专组】一、任务设计并制作一个LED线阵显示装置,该装置由图文录入器和16只红绿双色LED构成的线阵显示及转动控制两部分组成,利用视觉暂留现象,在120度弧面区域内显示不少于3个16×16点阵的图形或文字。
LED线阵显示装置结构如图1所示。
16只红绿双色LED线阵与电路板电动机图文录入器底座图1 LED线阵显示装置结构示意图二、要求1. 基本要求(1)当电动机转动后,在LED任意指定行上稳定显示两条水平线(单一颜色)。
(2)从LED最上和最下端一行开始,控制两条水平亮线向中间做上下往复运动。
(3)固定显示2个独立全亮的16×16点阵图形,图形间隔为4个点阵点距离。
(4)对(3)要求的显示图形在水平方向上进行宽窄变换循环显示,宽窄变化不小于两个点阵点的距离,变化不少于5次。
2. 发挥部分(1)设计制作具有显示与回放功能的图文录入器,5分钟内录入3张如图2所示格式的图文卡信息,录入方式不限制,按录入顺序回放显示。
(2)将录入的图文信息传输到LED线阵显示装置上,按输入顺序在120度弧面区域内同时显示(每幅图形之间应留3个点阵点的间隔),传输形式不限。
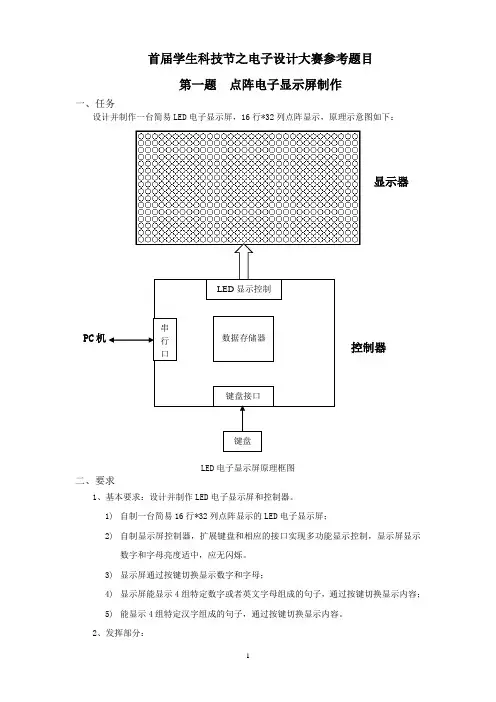
首届学生科技节之电子设计大赛参考题目第一题 点阵电子显示屏制作一、任务设计并制作一台简易LED 电子显示屏,16行*32列点阵显示,原理示意图如下:PC 机LED 电子显示屏原理框图二、要求1、基本要求:设计并制作LED 电子显示屏和控制器。
1) 自制一台简易16行*32列点阵显示的LED 电子显示屏;2) 自制显示屏控制器,扩展键盘和相应的接口实现多功能显示控制,显示屏显示数字和字母亮度适中,应无闪烁。
3) 显示屏通过按键切换显示数字和字母;4) 显示屏能显示4组特定数字或者英文字母组成的句子,通过按键切换显示内容; 5) 能显示4组特定汉字组成的句子,通过按键切换显示内容。
2、发挥部分:键盘LED 显示控制显示器控制器串行口 键盘接口数据存储器1)自制一台简易16行*64列点阵显示的LED电子显示屏;2)LED显示屏亮度连续可调。
3)实现信息的左右滚屏显示,预存信息的定时循环显示;4)实现实时时间的显示,显示屏数字显示:时∶分∶秒(例如 18∶38∶59);5)增大到10组(每组汉字8个或16个数字和字符)预存信息,信息具有掉电保护;6)实现和PC机通讯,通过PC机串口直接对显示信息进行更新(须做PC机客户程序);7)其他发挥功能。
三、评分标准项目满分基本要求设计与总结报告:方案比较、设计与论证,理论分析与计算,电路图及有关设计文件,测试方法与仪器,测试数据及测试结果分析。
50完成第(1)项20完成第(2)项15完成第(3)项 5完成第(4)项 5完成第(5)项 5发挥部分完成第(1)项7 完成第(2)项8 完成第(3)项10 完成第(4)项 5 完成第(5)项 5 完成第(6)项 5 完成第(7)项10四、说明1.显示格式和显示信息可以自定义。
2.电子显示屏LED显示灯只允许使用8*8 LED点阵显示模块。
3.显示屏的显示控制方案和控制器的选择方案任选。
4.不允许使用LED集成驱动模块。
2011年全国大学生电子设计竞赛竞赛时间:2011年8月31日~2011年9月3日1. 赛题要求和分类1.1 赛题要求在“全国大学生电子设计竞赛组委会官方网站”所公布的“全国大学生电子设计竞赛章程”、“关于组织2011年全国大学生电子设计竞赛的通知”和“2011年全国大学生电子设计竞赛命题原则及征题要求”中可以看到:(1)命题范围应以电子技术(包括模拟和数字电路)应用设计为主要内容。
可以涉及模-数混合电路、单片机、嵌入式系统、DSP、可编程器件、EDA软件的应用。
题目包括“理论设计”和“实际制作与调试”两部分。
竞赛题目应具有实际意义和应用背景,并考虑到目前教学基本内容和新技术应用趋势。
(2)命题要求竞赛题目应能测试学生运用基础知识的能力、实际设计能力和独立工作能力。
题目原则上应包括基本要求部分和发挥部分,从而使绝大多数参赛学生既能在规定时间内完成基本要求部分的设计工作,又能便于优秀学生有发挥与创新的余地。
命题应充分考虑到竞赛评审的操作性。
(3)题目类型①综合题。
综合题应涵盖模-数混合电路,可涉及单片机和可编程逻辑器件的应用,并尽可能适合不同类型学校和专业的学生选用;②专业题。
专业题是侧重于某一专业(如计算机、通信、自控、电子技术应用等)的题目;③电路题。
电路题是侧重于模拟电路、数字电路、电力电子线路等的题目;④新型器件和集成电路应用题。
新型器件和集成电路应用题侧重于新型器件的应用、新型集成电路的应用;⑤电子产品和仪器初步设计题。
常用电子产品和电子仪器初步设计的题目侧重于某一产品的初步设计。
不同类型的题目之间,在难易程度上允许有差别。
1.2 历届竞赛已经出现过的赛题分类全国大学生电子设计竞赛从1994年的首届试点到2009年已经成功地举办了9届。
从9届电子设计竞赛的赛题来看,53个赛题可以归纳成7类,即:(1)电源类:(7题)简易数控直流电源(第一届),直流稳压电源(第二届)等。
(2)信号源类:(5题)实用信号源的设计和制作(第二届),波形发生器(第五届),电压控制LC振荡器(A题)(第六届)等。
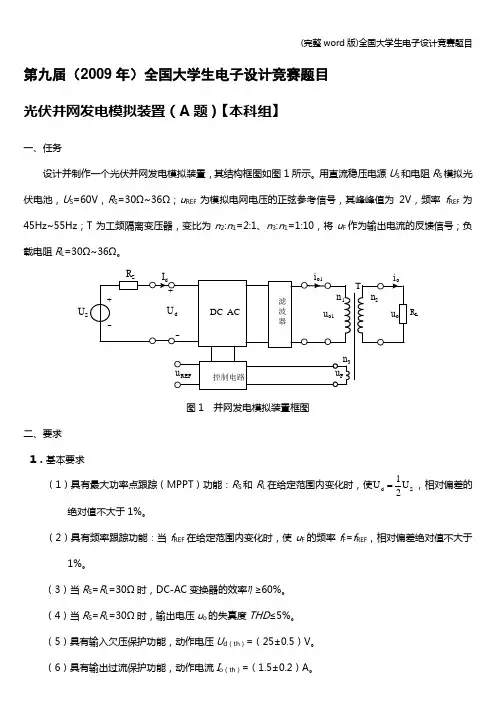
第九届(2009年)全国大学生电子设计竞赛题目 光伏并网发电模拟装置(A 题)【本科组】一、任务设计并制作一个光伏并网发电模拟装置,其结构框图如图1所示。
用直流稳压电源U S 和电阻R S 模拟光伏电池,U S =60V ,R S =30Ω~36Ω;u REF 为模拟电网电压的正弦参考信号,其峰峰值为2V ,频率f REF 为45Hz~55Hz ;T 为工频隔离变压器,变比为n 2:n 1=2:1、n 3:n 1=1:10,将u F 作为输出电流的反馈信号;负载电阻R L =30Ω~36Ω。
R LU S图1 并网发电模拟装置框图二、要求 1.基本要求(1)具有最大功率点跟踪(MPPT )功能:R S 和R L 在给定范围内变化时,使d S 12U U =,相对偏差的绝对值不大于1%。
(2)具有频率跟踪功能:当f REF 在给定范围内变化时,使u F 的频率f F =f REF ,相对偏差绝对值不大于1%。
(3)当R S =R L =30Ω时,DC-AC 变换器的效率η≥60%。
(4)当R S =R L =30Ω时,输出电压u o 的失真度THD ≤5%。
(5)具有输入欠压保护功能,动作电压U d (th )=(25±0.5)V 。
(6)具有输出过流保护功能,动作电流I o (th )=(1.5±0.2)A 。
2.发挥部分(1)提高DC-AC 变换器的效率,使η≥80%(R S =R L =30Ω时)。
(2)降低输出电压失真度,使THD ≤1%(R S =R L =30Ω时)。
(3)实现相位跟踪功能:当f REF 在给定范围内变化以及加非阻性负载时,均能保证u F 与u REF 同相,相位偏差的绝对值≤5°。
(4)过流、欠压故障排除后,装置能自动恢复为正常状态。
(5)其他。
三、说明1.本题中所有交流量除特别说明外均为有效值。
2.U S 采用实验室可调直流稳压电源,不需自制。

2023全国大学生电子设计竞赛题解析电子设计竞赛一直是大学生们展示创新能力和技术水平的重要平台。
2023全国大学生电子设计竞赛将围绕创新技术和实用性展开,为参赛选手提供一个良好的学习和交流平台。
在本文中,我们将对2023全国大学生电子设计竞赛的题目进行解析,并分享一些解题思路和创新点。
竞赛题目:智能家居控制系统设计题目要求:设计一个智能家居控制系统,实现对家庭电器的远程控制和智能化管理。
系统需要具备以下功能:1. 手机APP远程控制:用户可以通过手机APP远程控制家中的电器,如开关灯、调节温度等。
2. 人体检测传感器:系统能够通过人体感应传感器检测到家人是否在家,并相应地控制电器的开关。
3. 温湿度感应器:利用温湿度传感器实时监测室内温湿度情况,并自动调节空调、加湿器等电器工作模式。
4. 安全报警功能:系统能够通过门窗传感器和烟雾传感器实时监测家庭安全状况,一旦发现异常情况,及时报警。
5. 能源管理功能:系统能够统计家中各个电器的能耗情况,并生成能耗报表,帮助用户合理使用电器,实现节能减排。
解析和思路:一、系统架构设计在设计智能家居控制系统之前,首先需要进行系统架构设计。
可以采用分布式架构,将传感器、控制器和手机APP进行分离,分别负责数据采集、数据处理和用户界面。
二、传感器选择和布局根据题目要求,我们需要选择合适的传感器进行室内环境和人体检测。
例如,可以选择红外传感器、温湿度传感器、门窗传感器和烟雾传感器等。
在布局时,需要考虑合理的位置,以保证传感器能够准确、及时地感知到环境变化和人体活动。
三、数据采集和处理传感器采集到的数据需要进行处理和分析,以提供给用户相应的控制选项和状态反馈。
可以利用微控制器或嵌入式系统来实现数据采集和处理功能,根据传感器的输出数据进行相应的逻辑判断和控制指令生成。
四、远程控制和智能化管理通过手机APP,用户可以远程控制家中的电器。
可以利用无线通信技术,如Wi-Fi或蓝牙,将手机APP与控制器进行连接,实现指令的传输和响应。
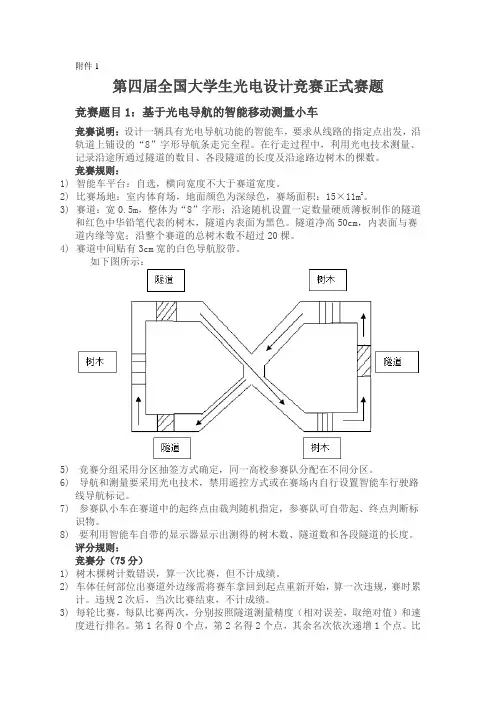
附件1第四届全国大学生光电设计竞赛正式赛题竞赛题目1:基于光电导航的智能移动测量小车竞赛说明:设计一辆具有光电导航功能的智能车,要求从线路的指定点出发,沿轨道上铺设的“8”字形导航条走完全程。
在行走过程中,利用光电技术测量、记录沿途所通过隧道的数目、各段隧道的长度及沿途路边树木的棵数。
竞赛规则:1)智能车平台:自选,横向宽度不大于赛道宽度。
2)比赛场地:室内体育场,地面颜色为深绿色,赛场面积:15×11m2。
3)赛道:宽0.5m,整体为“8”字形;沿途随机设置一定数量硬质薄板制作的隧道和红色中华铅笔代表的树木,隧道内表面为黑色。
隧道净高50cm,内表面与赛道内缘等宽;沿整个赛道的总树木数不超过20棵。
4)赛道中间贴有3cm宽的白色导航胶带。
如下图所示:5)竞赛分组采用分区抽签方式确定,同一高校参赛队分配在不同分区。
6)导航和测量要采用光电技术,禁用遥控方式或在赛场内自行设置智能车行驶路线导航标记。
7)参赛队小车在赛道中的起终点由裁判随机指定,参赛队可自带起、终点判断标识物。
8)要利用智能车自带的显示器显示出测得的树木数、隧道数和各段隧道的长度。
评分规则:竞赛分(75分)1)树木棵树计数错误,算一次比赛,但不计成绩。
2)车体任何部位出赛道外边缘需将赛车拿回到起点重新开始,算一次违规,赛时累计。
违规2次后,当次比赛结束,不计成绩。
3)每轮比赛,每队比赛两次,分别按照隧道测量精度(相对误差,取绝对值)和速度进行排名。
第1名得0个点,第2名得2个点,其余名次依次递增1个点。
比赛成绩为速度和精度所得点数之和,总点数小者优胜。
取两次比赛中成绩好的一次为本轮比赛的竞赛成绩。
竞赛第1名得满分75分,第二名得72分,第三名得70分,其余名次依次递减1分。
方案分(25分)竞赛成绩前16名(暂定,具体可根据组委会设奖情况进行调整)的参赛队要在竞赛结束后对本队设计方案进行答辩。
专家组将根据方案的新颖性、合理性、制作成本等因素综合判断,对答辩队进行排名。
2016年全国大学生电子设计大赛A题:金属物体探测定位器 (1)B题:开关电源模块并联供电系统(DC-DC) (4)C题:光伏并网发电模拟装置(DC-AC) (6)D题:带啸叫检测与抑制的音频功率放大器 (8)E题:数字频率计 (8)F题:双向DC-DC变换器 (13)G题:锁定放大器的设计 (13)H题:自选题 (18)信息工程学院2016.4A题:金属物体探测定位器1.任务心之间的定位误差应控制在5mm以;探测定位速度越快越好,探测定位总时间不应超过2分钟。
完成定位时给出声-光指示,此后探头不得再移动。
(30分)(3)将硬币改为自制圆铁环(用Φ2铁丝绕制),铁环外直径4cm。
重复要求(1)的探测过程,应使定位指针尽可能指向铁环圆心,定位误差应控制在5mm以内;完成定位时给出声-光指示,此后探头不得再移动,探测定位总时间应不超过3分钟。
(30分)(4)其他自主发挥功能。
(10分)(5)设计报告。
(20分)3.说明(1)金属物体探测定位装置探头采用AY-LDC1000板(由TI公司提供),可直接用AY-LDC1000板上的覆铜线圈,也可自制线圈;不得安装其他传感与摄像装置。
探测开始后,不得手动或遥控探测器。
(2)玻璃板可采用普通无色玻璃(玻璃边沿需贴上胶带以防划伤),也可用无色透明有机玻璃板;玻璃板长宽尺寸应大于50cm、厚度约3mm。
(3)探头从“探头进入区”一侧进入时探头的起始位置和摆放方向,以及探测区域内的被测金属物体摆放位置均由测试专家在现场指定。
B题:开关电源模块并联供电系统(DC-DC)一、任务设计并制作一个由两个额定输出功率均为16W的8VDC/DC模块构成的并联供电系统(见图1)。
图1 两个DC/DC模块并联供电系统主电路示意图二、要求1.基本要求(1)调整负载电阻至额定输出功率工作状态,供电系统的直流输出电压UO=8.0±0.4V。
(2)额定输出功率工作状态下,供电系统的效率不低于 60% 。
长春工业大学第八届大学生电子设计竞赛试题参赛注意事项1.2023年4月18日竞赛正式开始, 每队限定在提供的A~F题中任选一题。
2.每队严格限制5人之内。
3.竞赛期间, 可使用各种图书资料和网络资源, 但不得在学校指定场地外进行设计制作。
4、2023年6月5日竞赛结束, 6月6日早8:00上交设计报告、制作实物, 学校组织测试, 所有参赛队均到指定地点进行测试。
滴水器滴水检测系统(A)一、任务:设计并制作一个滴水检测系统。
如图1所示。
图1 结构原理二、规定:1、基本规定:(1)、具有水滴水速度显示功能。
(2)、具有水滴个数计数显示功能。
(3)、具有水滴滴量累计功能。
(4)、具有水滴滴量累计后, 显示单位升,数据有效位到小数点后三位。
并可以换算成毫升、公斤、立方米等功能。
2、发挥部分:(1)、具有存储数据自动回放功能、打印功能。
(2)、具有精确显示检测的水滴滴水速度和水滴滴量其误差≤1%功能。
(3)、具有定期启、停功能, 显示数据有效位到小数点后四位。
四、说明: 滴水器可选用滴液瓶、滴液管。
长春工业大学第八届大学生电子设计竞赛试题参赛注意事项1.2023年4月18日竞赛正式开始, 每队限定在提供的A~F题中任选一题。
2.每队严格限制5人之内。
3.竞赛期间, 可使用各种图书资料和网络资源, 但不得在学校指定场地外进行设计制作。
4、2023年6月5日竞赛结束, 6月6日早8:00上交设计报告、制作实物, 学校组织测试, 所有参赛队均到指定地点进行测试。
自动定量水温控制器(B)一、任务有A.B.C三个水容器, A为供热水容器, B为供冷水容器, C为冷热水混合容器。
工作原理是由A容器向C容器注入热水(温度任意, 但要高于C容器目的温度), B容器向C容器注入冷水(温度任意, 但要不高于C容器目的温度)。
规定在C容器中冷热水混合后总体积(或液位高度)固定不变, 并且C容器中水的温度可以在40-60℃之间任意设定。
第7届全国大学生光电设计竞赛题目竞赛题1:穿透毛玻璃的可见光成像系统竞技重点:透过复杂介质获取对向物体图像精细信息的能力。
竞赛说明:使用CMOS或者CCD成像系统透过毛玻璃对目标物体成像。
竞赛规则:使用自行设计的CMOS或CCD成像系统,透过毛玻璃对目标物成像。
毛玻璃与目标物之间不可添加任何光学元件和照明光源。
目标物距离毛玻璃5cm.评分规则:比赛前组织委员会准备4种不同散射程度的毛玻璃板。
每队在规定时间内,使用不同毛玻璃板对同一目标分别进行成像,并输出各次成像结果,竞赛成绩由各次成像结果的得分求和获得。
(竞赛队在各次成像间,后续使用的毛玻璃板必须低于前次成像使用的毛玻璃的散射度),总的成像时间不超过10分钟。
各队将所获得的物体图像保存为通用的数字图像文件,并将该次成像结果识别出来的物体图像精细信息填表上交。
裁判组对照原始目标物体,依据识别结果给出当次成像得分;不同毛玻璃成像条件下的得分权重不同。
注:不可对毛玻璃表面进行任何处理。
其他技术细节将在竞赛细则中给出。
口容竞赛题目2:光电“寻的”竞技车竞技重点t大视场目标快速捕获及定位的能力。
竞赛说明:设计一辆光电“寻的”竞技车,要求能够从指定位置出发,快速搜寻场地周边的随机点亮的信号灯。
信标灯(LED灯)亮灯顺序随机,且每个灯被灭后不再亮起。
比赛过程中,两参赛队同时发车,竞争到达点亮的信标灯前,当某车抵达点亮的信号灯前后,信号灯随即熄灭。
在此过程中,允许己方参赛车自主干扰对方的参赛车去争夺信标灯,为自己的赛车赢得更多的机会。
竞赛规则:1、竞赛分组采用抽签的方式。
2、传感器:须为光电传感器,须安装在小车上,数量以及安装方式不限。
3、比赛场地: 1/2标准羽毛球场,在下图所示的白线上共布置12个随机放置的信标灯。
4、检测信标灯必须使用光电技术,严禁使用远程遥控或者其他方式。
5、竞技车的车体有最大尺寸限制,将在竞赛细则中给出。
B
20
A C
200-20
E
20-
D
题试计设竞赛国大学生电子 2017 年全
参赛注意事项
竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高)月日( 9 18:008 职 高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
)参赛队认真 填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(2 )参赛者必须是有正式 学籍的全日制在校本、专科学生,应出示能够证明参赛者学生(3 身份的有效证件(如学生证) 随时备查。
人,开赛后不得中途更换队员。
3 (4)每队严格限制
)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设(5 计制 作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违 纪参赛队取消评 审资格。
,由专人封存。
竞赛结束,上交设计报告、制作实物及《登记表》 日 20:00(6)8 月
12
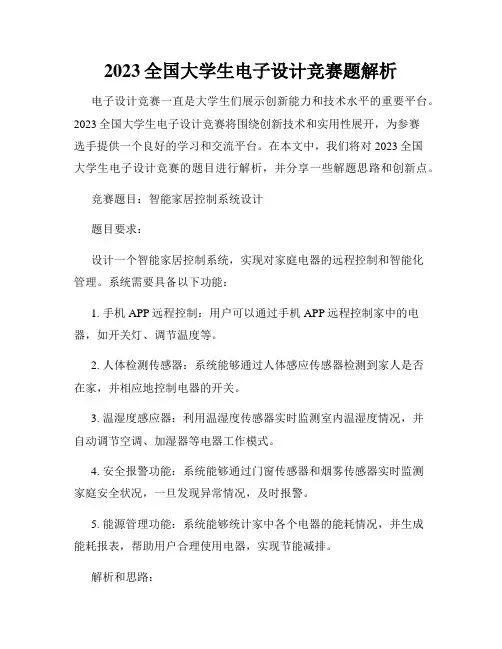
题)I 可见光室内定位装置(
【本科组】
一、任务
所示。
参赛者自 设计并制作可见光室内定位装置,其构成示意图如图 1 。
)个 侧面 80cm×80cm 的立方空间(包含顶部、底部和 3 行搭建不小于 80cm× 控 制电路进 LED 3 个白光 LED,其位置和角度自行设置,由顶部平面放置
、、C,并分为 A、B 行控制和驱动;底部平面绘制纵横坐标线(间隔 5cm) 正 常照明(无明显闪烁)的 个 LED E 五个区域,如图 2 所示。
要求在 3D、情 况下,测量电路根据传感器检测的信号判定传感器的位置。
控制电路 LED
LEDLED LED213
y (cm)
40 传感器 测量电路 LCD 底部平面坐标区域图 图 1 可见光室内定位装置示
意图 2 图 x40-40 (cm)I-1/3
-40
二、要求
.基本要求 1 区域,测量电路能正确区分其位于横坐标轴的上、 B、D(1) 传感器位于 下区域。
区域,测量电路能正确区分其位于纵坐标轴的左、 C、 E(2)传感器位于 右区域。
。
10cm 区域,测量显示其位置坐标值,绝对误差 不大于 (3)传感器位于 A 区域,测量显示其位置坐标值,绝对误差不 D、E4) 传感器位于 B、C、( 。
10cm 大于。
显示坐标值,显示分辨率为 0.1cm(5)测量电路 LCD .发挥部分 2 )传感器位于底部平面任意区域,测量显示其位置坐标值,绝对 误差不(1 。
大于 3cm 控制电路可由键盘输入阿拉伯数字,在正常照明和定位 (误差满)LED (2 发 LED 3 个 (3)足基本要求或(4))的情况下,测量电路 能接收并显示 送的数字信息。
路音频信号源,在正常照明和定位的情况下,测
3 LED 控制电路外接 3() 发送的语音信号中,选择任意一路进行播放,且 LED3 个 量电路能从
接收的语音信号均无明显失真。
。
5W+12V 单电源供电,供电功率不大于(4)
LED 控制电路采用 )其他。
5(三、说明
控制电路和测量电路相互独立。
1.LED .顶部平面不可放置摄像头等传感器
件。
2 ,用“┼”表示检测中心位置。
5cm×5cm×3cm3. 传感器部件体积不大
于
的信号可作为音频信号源。
MP3 4. 信号发生器或 个音频输入端、测量电路的
扬声器输入端和供电电 3 LED 控制电路的 5. 在 路端预留测试端口。
22 位置
绝对误差:6.)y)(xxy(e
00 为实际坐标值。
式中为测得坐标
值, 、 、 y x yx00 内将测得的坐标值锁定显示。
5s 7.每次位置测量开始后,
要求 测试环境:关闭照明灯,打开窗帘,自然采光,避免阳光直射。
8.
I-2/3.
项目
主要内容
满分
设计 报告
系统方案四、评分
比较与选择 方案描述
4
标准
理论分析与计算
定位方法 信息发送接收方法
6
抗干扰方法 误差分析
电路与程序设计
电路设计 程序设计
4
测试方案与测试结 测试方案 测试结果完整性 测 4
果
试结果分析
设计报告结构及规 摘要 正文结构 图表规范性
2
范性
合计
20
基本 )项 1 完成第(
10
要求
)项完成第(2
10
完成第(3)项
10
4)项完成第(
16
5 完成第()项
4
合计
50
发挥 完成第(1)项
12
部分
总分
I-3/3
)项 2 完成第( 完成第(3)项 4 完成第()项 其他 合计
10 18 5 5 50 120.
。