风力机的结构和数学模型
- 格式:pdf
- 大小:1.79 MB
- 文档页数:47
风力发电机组的建模和控制一、引言风力发电作为一种清洁能源,受到了越来越多国家的关注和推广。
其中,风力发电机组是发电的核心部件,它的建模和控制对于提高风力发电效率和降低成本至关重要。
本文将从建模和控制两个方面对风力发电机组进行详细的介绍。
二、风力发电机组建模1. 框图建模框图建模是风力发电机组建模的一种简单有效的方法,根据其工作原理,将其分为机械部分、发电机部分和控制部分三个子系统。
机械部分包括风轮、轴承、传动装置等;发电机部分包括发电机、电容器等;控制部分包括风速传感器、转速传感器、转矩传感器等。
不同子系统之间通过传递物理量实现耦合。
2. 数学建模数学建模是风力发电机组建模更加精确的方法。
将机械、电气和控制部分分别采用不同的数学模型,通过数学公式描述它们之间的关系。
其中,机械部分的模型可以采用旋转体的动力学模型,电气部分的模型可采用功率方程和转子电路的方程,控制部分的模型可以采用PID控制器等。
三、风力发电机组控制1. 风速控制风速控制是风力发电机组控制的一种重要方式,通过控制风轮的转速以及转矩来控制风机的工作状态。
其主要包括集中式控制和分布式控制两种方式。
集中式控制由集中的控制器控制所有的风机,而分布式控制则分别控制每个风机。
2. 转速控制转速控制也是风力发电机组控制的一种重要方式,主要是通过控制转速来避免风机的过载和过速现象。
其主要包括定速控制和变速控制两种方式。
定速控制采用恒定转速运行,而变速控制则可以根据实际风速进行调节。
3. 转矩控制转矩控制是风力发电机组控制中最重要的一种方式,主要是通过控制发电机的转矩来控制风机的功率输出。
其主要包括实时控制和最大功率点跟踪两种方式。
实时控制通过反馈控制实现转矩调节,而最大功率点跟踪则是根据实际风速进行转矩调节,以实现最大化的功率输出。
四、总结风力发电机组的建模和控制是风力发电技术的关键研究领域,其在实际应用中能够提高风力发电效率和降低成本。
本文从框图建模和数学建模两个方面介绍了风力发电机组建模的方法,从风速控制、转速控制和转矩控制三个方面介绍了其控制方式。
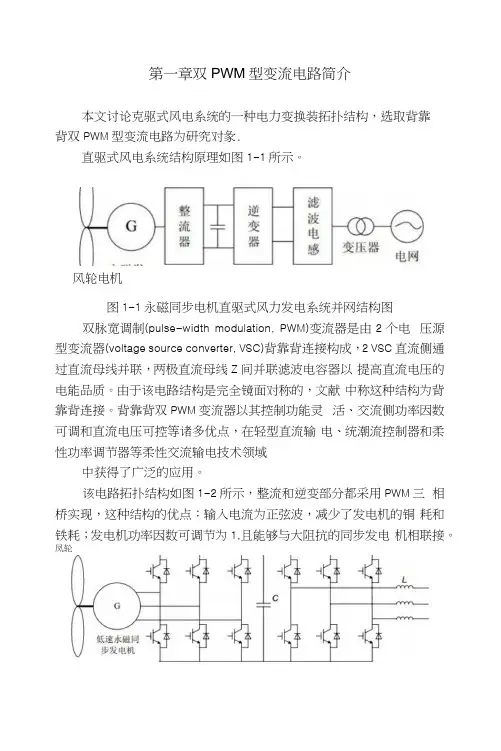
第一章双PWM型变流电路简介本文讨论克驱式风电系统的一种电力变换装拓扑结构,选取背靠背双PWM型变流电路为研究对彖.直驱式风电系统结构原理如图1-1所示。
风轮电机图1-1永磁同步电机直驱式风力发电系统并网结构图双脉宽调制(pulse-width modulation, PWM)变流器是由2个电压源型变流器(voltage source converter, VSC)背靠背连接构成,2 VSC直流侧通过直流母线并联,两极直流母线Z间并联滤波电容器以提高直流电压的电能品质。
由于该电路结构是完全镜面对称的,文献中称这种结构为背靠背连接。
背靠背双PWM变流器以其控制功能灵活、交流侧功率因数可调和直流电压可控等诸多优点,在轻型直流输电、统潮流控制器和柔性功率调节器等柔性交流输电技术领域中获得了广泛的应用。
该电路拓扑结构如图1-2所示,整流和逆变部分都采用PWM三相桥实现,这种结构的优点:输入电流为正弦波,减少了发电机的铜耗和铁耗;发电机功率因数可调节为1,且能够与大阻抗的同步发电机相联接。
凤轮图1-2三相电压型PWM逆变器的拓扑结构第二章双PWM变流器动态数学模型三相桥式拓扑结构构中交流侧采用三相对称的无中线连接方式, 图中L代表交流侧滤波电感参数,R为电感中的寄生电阻,图中直流电压源1}血代表并网变流器直流母线电压,同时也是与发电机转了绕组相连的变流器直流母线电压。
为建立三相电压源型并网变流器的数学模型,根据其其拓扑结构,首先作以下假设:1.电网电动势为平稳的纯正弦波电动势(e a,e b,e c)o2・主电路开关元器件为理想开关,无损耗。
3・三相参数是对称的。
4・网侧滤波电感L是线性的,且不考虑饱和。
以A相为例,当VI导通V2关断时,直流电源Ude正极直接加到节点a处,由图可知,U M1 =U dc/2;当V2导通VI关断时,直流电源Ude负极接于节点a处,同理可知,=-U dc/2,同理易知节点b和c也是根据上下MOS管V5、V6 )导通情况决定其电位的,由此可见,三相中任一相输出的相电压都有正负两个电平,因此这种结构的逆变器称为三相两电平逆变器。
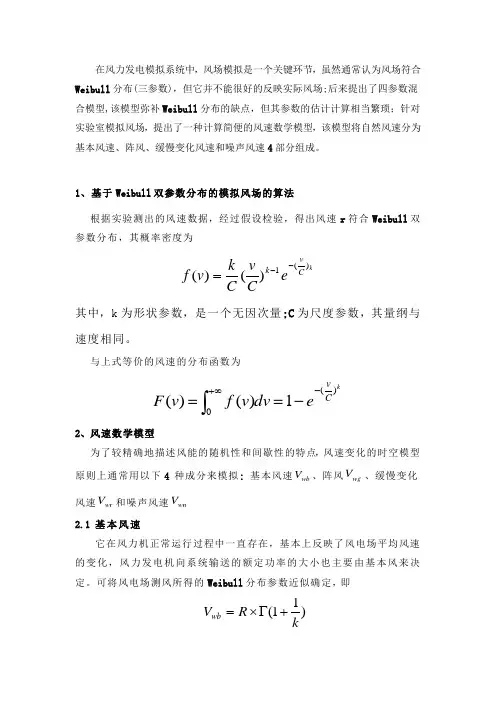
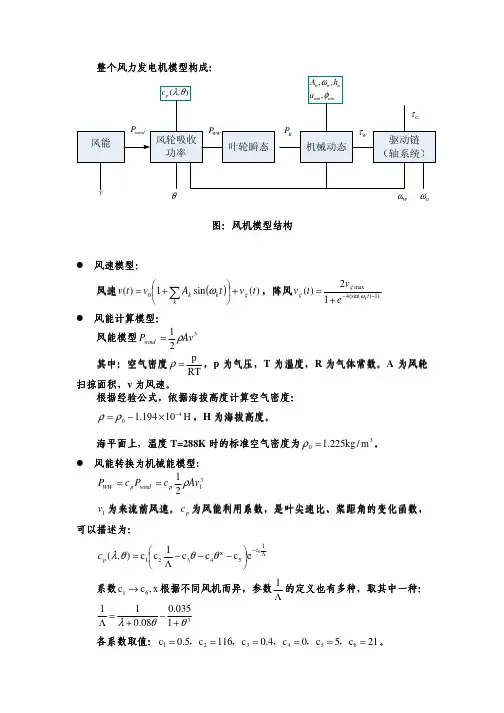
在风力发电模拟系统中,风场模拟是一个关键环节,虽然通常认为风场符合Weibull 分布(三参数),但它并不能很好的反映实际风场;后来提出了四参数混合模型,该模型弥补Weibull 分布的缺点,但其参数的估计计算相当繁琐;针对实验室模拟风场,提出了一种计算简便的风速数学模型,该模型将自然风速分为基本风速、阵风、缓慢变化风速和噪声风速4部分组成。
1、基于Weibull 双参数分布的模拟风场的算法根据实验测出的风速数据,经过假设检验,得出风速r 符合Weibull 双参数分布,其概率密度为k C v k e Cv C k v f )(1)()(--= 其中,k 为形状参数,是一个无因次量;C 为尺度参数,其量纲与速度相同。
与上式等价的风速的分布函数为 k C v e dv v f v F )(01)()(-∞+-==⎰2、风速数学模型 为了较精确地描述风能的随机性和间歇性的特点,风速变化的时空模型原则上通常用以下4 种成分来模拟: 基本风速wb V 、阵风wg V 、缓慢变化风速wr V 和噪声风速wn V2.1 基本风速它在风力机正常运行过程中一直存在,基本上反映了风电场平均风速的变化,风力发电机向系统输送的额定功率的大小也主要由基本风来决 定。
可将风电场测风所得的Weibull 分布参数近似确定,即)11(kR V wb +Γ⨯=一般认为基本风速不随时间变化,因而可以取常数。
b wb K V =2.2 阵 风为描述风速突然变化的特性,可用阵风来模拟,在该时间段内风速具有余弦特性,在电力系统动态稳定分析中,特别是在分析风力发电系对电网电压波动的影响时,通常用它来考核在较大风速变化情况下的动态特性(电压波动特性)。
⎪⎪⎪⎩⎪⎪⎪⎨⎧=+<<⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛--gg g g g V T T t T T T t G wg 111max 0 2cos 12π其他其中,ma x G 为阵风峰值;g T 为阵风周期;g T 1为阵风开始时间;t 为时间。
风力发电系统建模与仿真摘要:风力发电作为一种清洁的可再生能源利用方式,近年来在世界范围内获得了飞速的发展。
本文基于风力机发电建立模型,主要完成了以下工作:(1)基于风资源特点,建立了以风频、风速模型为基础的风力发电理论基础;(2)运用叶素理论,建立了变桨距风力机机理模型;(3)分析了变速恒频风力发电机的运行区域与变桨距控制的原理与方法,并给出了机组的仿真模型,为风力发电软件仿真奠定了基础;(4)搭建了一套基于PSCAD/EMTDC仿真软件的风力发电系统控制模型以及完整的风力发电样例系统模型,并且已初步实现风力机特性模拟功能。
关键词:风力发电;风频;风速;风力机;变桨距;建模与仿真1 风资源及风力发电的基本原理1.1 风资源概述(1)风能的基本情况[1]风的形成乃是空气流动的结果。
风向和风速是两个描述风的重要参数。
风向是指风吹来的方向,如果风是从东方吹来就称为东风。
风速是表示风移动的速度即单位时间内空气流动所经过的距离。
风速是指某一高度连续10min所测得各瞬时风速的平均值。
一般以草地上空10m高处的10min内风速的平均值为参考。
风玫瑰图是一个给定地点一段时间内的风向分布图。
通过它可以得知当地的主导风向。
风能的特点主要有:能量密度低、不稳定性、分布不均匀、可再生、须在有风地带、无污染、分布广泛、可分散利用、另外不须能源运输、可和其它能源相互转换等。
(2)风能资源的估算风能的大小实际就是气流流过的动能,因此可以推导出气流在单位时间内垂直流过单位截面积的风能,即风能密度,表示如下:3ω= (1-1)5.0vρ式中,ω——风能密度(2W),是描述一个地方风能潜力的最方便最有价值的量;/mρ——空气密度(3kg);/mv ——风速(s m /)。
由于风速是一个随机性很大的量,必须通过一段时间的观测来了解它的平均状况,一个地方风能潜力的多少要视该地常年平均风能密度的大小。
因此需要求出在一段时间内的平均风能密度,这个值可以将风能密度公式对时间积分后平均来求得。
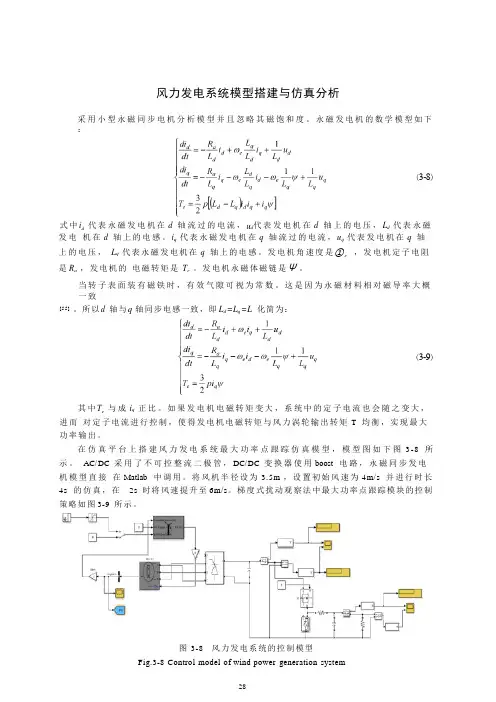
风力发电系统模型搭建与仿真分析采用小型永磁同步电机分析模型并且忽略其磁饱和度。
永磁发电机的数学模型如下:(3-8)代表永磁发电机在d 轴流过的电流,u d代表发电机在d 轴上的电压,L d 代表永磁式中id发电机在d 轴上的电感。
i q 代表永磁发电机在q 轴流过的电流,u q 代表发电机在q 轴上的电压,L q 代表永磁发电机在q 轴上的电感。
发电机角速度是①e ,发电机定子电阻是R a ,发电机的电磁转矩是T e 。
发电机永磁体磁链是Ψ。
当转子表面装有磁铁时,有效气隙可视为常数。
这是因为永磁材料相对磁导率大概一致[55] 。
所以d轴与q轴同步电感一致,即L d =L q =L 化简为:(3-9)其中T与成i q 正比。
如果发电机电磁转矩变大,系统中的定子电流也会随之变大,e进而对定子电流进行控制,使得发电机电磁转矩与风力涡轮输出转矩T 均衡,实现最大功率输出。
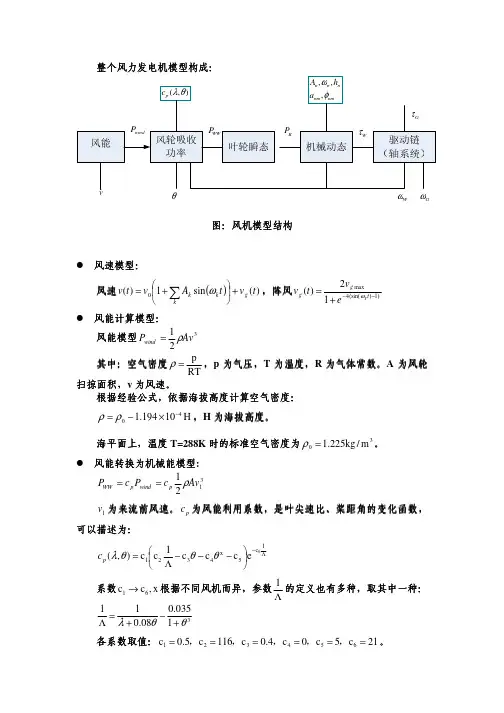
在仿真平台上搭建风力发电系统最大功率点跟踪仿真模型,模型图如下图3-8 所示。
AC/DC 采用了不可控整流二极管,DC/DC 变换器使用boost 电路,永磁同步发电机模型直接在Matlab 中调用。
将风机半径设为3.5m ,设置初始风速为4m/s 并进行时长4s 的仿真,在2s 时将风速提升至6m/s。
梯度式扰动观察法中最大功率点跟踪模块的控制策略如图3-9 所示。
图3-8 风力发电系统的控制模型Fig.3-8 Control model of wind power generation system28图 3-9 风力发电最大功率跟踪模块Fig.3-9 Wind power generation maximum power tracking module永磁同步电机参数情况如下表 3-1 所示。
表 3-1 永磁同步电机参数Tab.3-1 Parameter of synchronous machine名称参数大小额定转速(rad/s ) 40 转动惯量(kg/m 2) 0. 189 定子绕组电阻 (Ω) 0.05 定子绕组电感( m H )7. 15 极对数 34 磁链(Wb )0. 1892风力发电系统最大功率跟踪仿真曲线如图 3-10 和 3-11 所示。
风力发电机组系统建模与仿真研究一、概述随着全球能源危机和环境问题的日益严重,风力发电作为一种清洁、可再生的能源形式,受到了广泛关注。
风力发电机组作为风力发电的核心设备,其性能优化和系统稳定性对于提高风电场的整体效率和经济效益具有重要意义。
对风力发电机组系统进行建模与仿真研究,不仅可以深入了解风力发电机组的运行特性和动态行为,还可以为风力发电系统的优化设计、故障诊断和性能提升提供理论支持和技术指导。
风力发电机组系统建模与仿真研究涉及多个学科领域,包括机械工程、电力电子、自动控制、计算机科学等。
建模过程需要考虑风力发电机组的机械结构、电气控制、风能转换等多个方面,以及风力发电机组与电网的相互作用。
仿真研究则通过构建数学模型和计算机仿真平台,模拟风力发电机组的实际运行过程,分析不同条件下的性能表现和动态特性。
近年来,随着计算机技术和仿真软件的不断发展,风力发电机组系统建模与仿真研究取得了显著进展。
各种先进的建模方法和仿真工具被应用于风力发电机组系统的研究中,为风力发电技术的发展提供了有力支持。
由于风力发电的复杂性和不确定性,风力发电机组系统建模与仿真研究仍面临诸多挑战,需要不断探索和创新。
本文旨在对风力发电机组系统建模与仿真研究进行全面的综述和分析。
介绍风力发电机组的基本结构和工作原理,阐述建模与仿真的基本原理和方法。
重点分析风力发电机组系统建模与仿真研究的关键技术和挑战,包括建模精度、仿真效率、风能转换效率优化等方面。
展望风力发电机组系统建模与仿真研究的发展趋势和未来研究方向,为风力发电技术的持续发展和创新提供参考和借鉴。
1. 风力发电的背景和意义随着全球能源需求的不断增长,传统能源如煤炭、石油等化石燃料的消耗日益加剧,同时带来的环境污染和气候变化问题也日益严重。
寻找清洁、可再生的能源已成为全球关注的焦点。
风能作为一种清洁、无污染、可再生的能源,正受到越来越多的关注和利用。
风力发电技术作为风能利用的主要方式之一,具有广阔的应用前景和巨大的发展潜力。
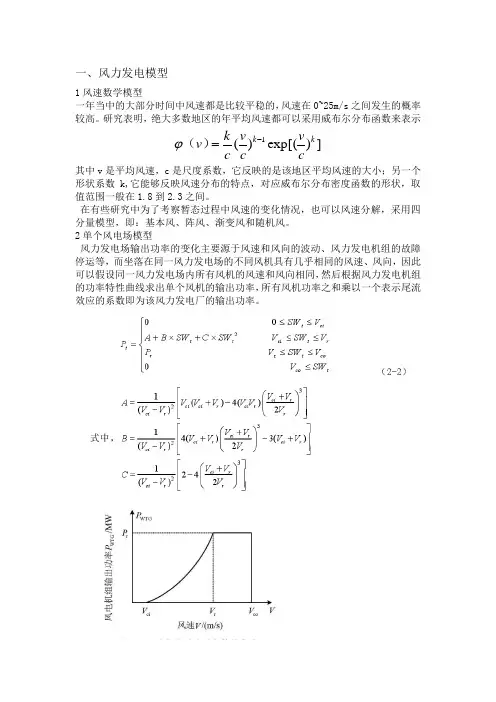
一、风力发电模型1风速数学模型一年当中的大部分时间中风速都是比较平稳的,风速在0~25m/s 之间发生的概率较高。
研究表明,绝大多数地区的年平均风速都可以采用威布尔分布函数来表示])exp[()(1k k cv c v c k v -=)(ϕ 其中v 是平均风速,c 是尺度系数,它反映的是该地区平均风速的大小;另一个形状系数k,它能够反映风速分布的特点,对应威布尔分布密度函数的形状,取值范围一般在1.8到2.3之间。
在有些研究中为了考察暂态过程中风速的变化情况,也可以风速分解,采用四分量模型,即:基本风、阵风、渐变风和随机风。
2单个风电场模型风力发电场输出功率的变化主要源于风速和风向的波动、风力发电机组的故障停运等,而坐落在同一风力发电场的不同风机具有几乎相同的风速、风向,因此可以假设同一风力发电场内所有风机的风速和风向相同,然后根据风力发电机组的功率特性曲线求出单个风机的输出功率,所有风机功率之和乘以一个表示尾流效应的系数即为该风力发电厂的输出功率。
其中,t SW 为风机轮毂高度处的风速,co r ci ,V V V ,以及r P 为别为风机启动风速、额定风速、切除风速以及风机额定功率。
在此基础上,引入了风机停运模型来模拟风力发电机组的故障停运:风力发电机组具有一定的故障率。
当风机处于检修状态时,输出为零;当风机处于运行状态时,输出功率由风力发电场风速决定二、光伏发电模型1,光伏发电系统是由光伏电池板、控制器、电能存储和变换等环节构成的发电与电能变换系统。
2,光伏发点输出功率模型其中,P 为输出功率,mod η为该小时环境温度下的模块效率,A 为光照总面积,wr η为配线效率系数,pc η为功率调节系统的效率,tilt I 为倾斜面的光照,l horisconta I 为水平面的光照,R 为l horisconta I 到tilt I 的折算系数,sd η为模块的标准效率,m f 为匹配系数,β为效率改变的温度系数,cell T 为环境温度。
风力机数学模型之风能利用系数CpC_P.psc考虑转换效率p C ,风力机输出的机械能为:30.5(,)W p W P C AV ρλβ=对于不同桨叶特性的变桨距风电机组,(,)p C λβ特性可近似表示为多种形式: ① PSCAD 中的风能利用系数为:20.170.5(0.022 5.6)p C e γγβ-=-- 其中 2.237WV γω*=Cp1gamma betacpCp 数学模型②12.5116(,)0.220.45ip i C e λλββλ-⎛⎫=-- ⎪⎝⎭其中,3110.0350.081iλλββ=-++,R vωλ=Cp2gammabetacp③对于变桨距型风力发电机,(,)p C λβ特性可近似表示为:0.255(,)0.50.0222fRC f p RC C eλλββλ-⎛⎫=-- ⎪⎝⎭其中f C 为叶片设计常数,一般取1-3。
(,)p C λβ特性一般是由风力机制造厂通过实验给出,如果得不到(,)p C λβ的实际数据,对于变桨距风力发电机组可用上式来近似表示。
Cp3gamma betacp④521346(,)iC p i C C C C C eC λλββλλ-⎛⎫=--+ ⎪⎝⎭其中,3110.0350.081i λλββ=-++,10.5176C =,2116C =,30.4C =,45C =,521C =,60.0068C =,R vωλ=。
R 为叶片长度(m ),ω为风机轮毂的角速度(rad/s )。
当β=0,λ=8.1时,(,)p C λβ有最大值0.48。
gammacpCp4 beta。
风力发电机组动态模型研究随着人们对可再生能源的重视和风能技术的不断发展,风力发电机组动态模型的研究变得越来越重要。
本文将围绕风力发电机组动态模型展开情节,介绍相关的数学模型、理论知识和算法,并适当总结前文的主要观点和证据。
风力发电机组动态模型描述了风力发电机组在风速、功率输出、空气动力学等方面的性能。
通过建立动态模型,可以对风力发电机组进行模拟和分析,以优化其性能、控制策略及可靠性。
在本文中,我们将介绍一种基于数学模型和理论知识的风力发电机组动态模型。
风力发电机组动态模型的数学模型通常包括风速模型、发电机组功率模型、控制模型等。
风速模型描述了风力发电机组所处风场的特性,包括平均风速、风速谱等。
常用的风速模型包括威布尔分布、瑞利分布等。
通过对风速模型进行分析,可以了解风场的风能特性和风力发电机组的可靠性。
发电机组功率模型描述了风力发电机组如何将风能转化为电能的过程。
根据贝茨理论,风能转换为电能的效率取决于风轮直径、风速、空气密度等因素。
通过建立功率模型,可以分析风力发电机组的功率输出性能,从而优化其设计。
控制模型描述了风力发电机组的控制策略,包括最大功率追踪、载荷控制等。
通过建立控制模型,可以实现风力发电机组的智能控制,提高其运行效率和可靠性。
风力发电机组动态模型的理论知识主要包括空气动力学、机械传动、电力电子技术等。
空气动力学是研究气体与固体表面相互作用的科学。
在风力发电机组中,空气动力学用于分析风轮在风场中的表现,包括升力、阻力等。
通过优化风轮的空气动力学设计,可以提高风力发电机组的功率输出和运行效率。
机械传动是实现风能转换为电能的关键环节。
在风力发电机组中,机械传动将风轮的动力传递给发电机,使其转化为电能。
机械传动的性能直接影响到风力发电机组的效率和可靠性。
电力电子技术是实现风力发电机组控制和并网的关键技术。
通过电力电子技术,可以实现发电机的矢量控制和最大功率追踪等功能,从而提高风力发电机组的运行效率和可靠性。
目录1、双馈风电机组的结构及工作原理2、DFIG的数学模型3、DFIG的控制方法4、常见DFIG的保护方案1.双馈风电机组的结构及工作原理1.1双馈发电机的定义:双馈风力发电机是指定子侧直接接入电网,转子侧经双向变频器接入所需低频励磁电流的一类特殊异步电动机。
因为定子与转子两侧都可能有能量的馈送, 所以称为双馈风力发电机。
1风力机2齿轮箱3放电机4变频器双馈风力发电机结构图1.2 DIFG的结构特点:定子和转子都能向电网馈电。
具有独立的励磁电源。
交流励磁。
交流励磁可调量有三个:1)交流励磁电流的幅值;2)交流励磁电流相位;3)交流励磁电流的频率。
改变频率电机调速;改变励磁电流相位改变电机功率角(调节P,Q)1.3 DFIG的发电原理DFIG的发电原理:设双馈电机的定子转子均为对称绕组,电机的极对数为P.如果在转子绕组中通上频率为f2的三相对称电流,所产生的的旋转磁场相对于转子本身的旋转速度为:又假设转子本身的转速为n,则转子绕组产生的旋转磁场现对于定子绕组的旋转的速度为:定子接着电网,频率恒定:当风速变化时n变化,通过改变n2,来保持n1的恒定,则转子的励磁电流频率为:1.4DFIG 的运行状态次同步状态:n<n1,由转差频率为f2的电流产生的旋转磁场的转速(n2)与转子转速(n)相同,有n+n2=n1;此时电机的功率流向如下下图,此时Pout=Pg-PsDFIG电网双电源变换器PmPgPsPout变速箱同步状态:n=n1,f2=0,转子绕组中通入的电流为直流电,仅提供无功功率,此时电机运行跟同步电机运行一样。
1.4DFIG 的运行状态超同步状态:n>n1,改变通入转子绕组电流的相序,使其产生旋转磁场的方向与转子旋转方向相反,此时有n-n2=n1;电机的功率流向如下:Pout=Ps+Pg 。
DFIG电网双电源变换器PmPgPsPout变速箱1.5实际双馈风力发电机的铭牌参数1.5实际双馈风力发电机的外观1.5实际双馈风力发电机的剖面图1.5实际双馈风力发电机的剖面图1.5实际双馈风力发电机的滑环腔室内部1.5实际双馈风力发电机的接线盒1.5实际双馈风力发电机的接线盒2.DFIG的数学模型DFIG基本方程DFIG等效电路图与矢量图DFIG数学模型2.1 DFIG的基本方程基本假定:只考虑定,转子的基波分量不考虑谐波分量。
永磁直驱风力发电机建模报告(改4)一、按变流器拓扑分类1、不可控整流+逆变器拓扑图1 不控整流+电压源型逆变器不控整流+逆变器构成的拓扑结构简单, 由二极管整流电路将PMSG 发出的交流电转变为直流电,然后由电压源型逆变器VSI转变为交流电, 送入电网。
由不控整流得到的直流侧电压随输入而变化, 通过全控型器件构成VSI, 可以通过改变调制比来实现并网电压频率和幅值恒定; 这种拓扑可以进一步提高开关频率, 减小谐波污染, 灵活调节输出到电网的有功功率和无功功率, 从而调节PMSG 的转速, 使其具有最大风能捕获的功能; 缺点是不能直接调节发电机电磁转矩, 动态响应较慢, 不控整流会造成定子电流谐波含量较大, 会增大电机损耗和转矩脉动, 并且当风速变化范围较大时, VSI 的电压调节作用有限。
2、不控整流+DC /DC 变换+逆变拓扑通过增加DC/DC变换器, 可以实现输入侧的功率因数校正( PFC) , 提高发电机的运行效率; 同时当风速变化时, 不控整流得到的电压也在变化, 而通过DC/DC 变换器的调节可以保持直流侧电压的稳定, 并能对PMSG 的电磁转矩和转速进行控制, 实现变速恒频运行, 使其具有最大风能捕获功能。
3、背靠背双PWM变换器拓扑发电机定子通过背靠背变流器和电网连接。
发电机侧PWM 变换器通过调节定子侧的d 轴和q 轴电流, 控制发电机的电磁转矩和定子的无功功率(无功设定值为0), 使发电机运行在变速恒频状态, 额定风速以下具有最大风能捕获功能;网侧PWM 变换器通过调节网侧的d 轴和q 轴电流, 保持直流侧电压稳定, 实现有功和无功的解耦控制, 控制流向电网的无功功率,通常运行在单位功率因数状态, 此外网侧变换器还要保证变流器输出的THD 尽可能小, 提高注入电网的电能质量。
二、 机组各部分数学模型 (一) 背靠背拓扑1.风速模型风速模型是进行风力发电研究的源参数。
自然界的风, 并不是由单一元素构成的, 在考虑风的组成时, 可根据风电场实测风速数据, 做出各种风速出现的概率分布, 由此确定几种典型的风函数。
内容提要
1 风力机的基本结构
2 风力机的数学模型
3 风力机功率控制方式
第1章
风力机的基本结构
风力发电系统的基本部件
风力发电系统的基本部件
风力发电系统的基本部件
风轮
由叶片和轮毂组成由叶片和轮毂组成;;是机组中最重要的部件;决定性能和成本决定性能和成本;;
目前多数是上风式目前多数是上风式,,三叶片三叶片;;
叶片与轮毂的连接叶片与轮毂的连接::固定式固定式,,可动式可动式;;
叶片多由复合材料叶片多由复合材料((玻璃钢玻璃钢))构成
传动轴系
由风力发电机中的旋转部件组成由风力发电机中的旋转部件组成。
主要包括低速轴主要包括低速轴,,齿轮箱和高速轴齿轮箱和高速轴,,以及支撑轴承以及支撑轴承、、联轴器和机械刹车。
齿轮箱有两种齿轮箱有两种::平行轴式和行星式平行轴式和行星式。
大型机组中多用行星式用行星式((重量和尺寸优势重量和尺寸优势)。
)。
)。
有些机组无齿轮箱有些机组无齿轮箱有些机组无齿轮箱。
传动轴系的设计按传统的机械工程方法传动轴系的设计按传统的机械工程方法,,主传动轴系的设计按传统的机械工程方法系的设计按传统的机械工程方法,,主要考虑特殊的受载荷情况受载荷情况。
机舱与偏航系统
包括机舱盖包括机舱盖,,底板和偏航系统底板和偏航系统。
机舱盖起防护作用机舱盖起防护作用,,底板支撑着传动轴系部件板支撑着传动轴系部件。
偏航系统的主要部件是一个连接底板和塔架的大齿轮偏航系统的主要部件是一个连接底板和塔架的大齿轮。
上风式采用主动偏航,上风式采用主动偏航,由偏航电机驱动由偏航电机驱动,,由偏航控制系统控制统控制。
偏航刹车用来固定机舱位置偏航刹车用来固定机舱位置。
塔架与基础
塔架有钢管塔架有钢管、、桁架和混凝土三种桁架和混凝土三种。
塔架高度通常为风轮直径的塔架高度通常为风轮直径的1~1.51~1.51~1.5倍倍
塔架的刚度在风力机动力学中是主因素塔架的刚度在风力机动力学中是主因素。
第2章
风力机的数学模型
(Betz)理论贝兹(
贝兹
风力机功率表达式的推导
风力机功率表达式的推导
风力机功率表达式的推导
功率系数Cp的性质
风轮的几何描述
叶片的形状
叶片截面
叶片截面的描述
桨距角β的定义
叶尖速度比
功率系数Cp的典型表达式
功率系数Cp与β和λ的关系
功率系数Cp与λ的关系
(β固定在0 °)
的关系(
风力机功率与风速和风轮转速之间的关系风力机功率与风速和风轮转速之间的关系((β固定在0 °)
叶片的数目与功率系数Cp和最优λ的关系对应某种特定的叶片
第3章
风力机功率控制方式
失速控制方式
主动失速控制方式
变桨距控制方式
变桨距控制框图
风轮功率控制方式比较
风电机组的功率风电机组的功率--风速曲线
风电机组的功率风电机组的功率--风速曲线
风电机组的功率风电机组的功率--风速曲线
变桨距风电机组的功率变桨距风电机组的功率--风速曲线
变桨距风电机组的功率变桨距风电机组的功率--风速曲线
变桨距风电机组的功率变桨距风电机组的功率--风速曲线
变桨距风电机组的功率变桨距风电机组的功率--风速曲线
实例BONUS 2.3 MW
变桨距风电机组的功率变桨距风电机组的功率--转速特性曲线
变桨距风电机组的功率变桨距风电机组的功率--转速特性曲线
实例-Vestas[-292.40]V52m-850风机
风速与Beta的关系
Lambda与Beta的关系
PSS/E采用的理想化功率跟踪与调节特性曲线。