作业(二)答案:单自由度机械系统动力学等效转动惯量等效力矩
- 格式:doc
- 大小:85.50 KB
- 文档页数:6


第二章 机构的结构分析一.填空题1.组成机构的基本要素是 和 。
机构具有确定运动的条件是: 。
2.在平面机构中,每一个高副引入 个约束,每一个低副引入 个约束,所以平面机构自由度的计算公式为F = 。
应用该公式时,应注意的事项是: 。
3.机构中各构件都应有确定的运动,但必须满足的条件是: 。
二.综合题1.根据图示机构,画出去掉了虚约束和局部自由度的等效机构运动简图,并计算机构的自由度。
设标有箭头者为原动件,试判断该机构的运动是否确定,为什么?2.计算图示机构的自由度。
如有复合铰链、局部自由度、虚约束,请指明所在之处。
(a ) (b )ADECHGF IBK1234567893.计算图示各机构的自由度。
(a)(b)(c)(d)(e)(f)4.计算机构的自由度,并进行机构的结构分析,将其基本杆组拆分出来,指出各个基本杆组的级别以及机构的级别。
(a)(b)(c)(d)5.计算机构的自由度,并分析组成此机构的基本杆组。
如果在该机构中改选FG 为原动件,试问组成此机构的基本杆组是否发生变化。
6.试验算图示机构的运动是否确定。
如机构运动不确定请提出其具有确定运动的修改方案。
(a)(b)第三章平面机构的运动分析一、综合题1、试求图示各机构在图示位置时全部瞬心的位置(用符号P直接在图上标出)。
ij2、已知图示机构的输入角速度ω1,试用瞬心法求机构的输出速度ω3。
要求画出相应的瞬心,写出ω3的表达式,并标明方向。
3、在图示的齿轮--连杆组合机构中,试用瞬心法求齿轮1与3的传动比ω1/ω2。
4、在图示的四杆机构中,AB l =60mm, CD l =90mm, AD l =BC l =120mm, 2ω=10rad/s ,试用瞬心法求:(1)当ϕ=165°时,点C 的速度c v ;(2)当ϕ=165°时,构件3的BC 线上速度最小的一点E 的位置及其速度的大小; (3)当0c v =u u u v时,ϕ角之值(有两个解)。

第 7 章机械动力学7.1概述一.机械动力学的研究内容及意义1)机械的摩擦及效率;2)机械的平衡;3)分析、计算机械系统的速度波动,周期性波动的调速方法和有关的调速零件的设计。
二.机械中作用的力作为发动机的曲柄滑块机构P-驱动力(爆发力)Mr –阻力矩(工作阻力矩)G2 –连杆重力重心上升-阻力,重心下降-驱动力F S2、 M S2 - 惯性力与惯性力矩,N、F f –正压力与摩擦力7.2 机械中的摩擦及效率一.机械中的摩擦(一)移动副中的摩擦1.平面摩擦摩擦力产生的条件:(1)两物体直接接触,彼此间有正压力;(2)有相对运动或相对运动的趋势。
作用:阻止两物体产生有相对运。
设摩擦系数为u,F21=uN 21F21tg,φ-摩擦角N21将 F21与 N21合成为 R21R21-总反力(全反力)P X P分解为 P和 P ,tgX Y P Y( P X P sin、 P Y P cos )F21P X,有F21tgY 方向平衡: Py=N 21,即:tg tg P Xtg讨论:①总反力 R21恒与相对速度V 12成 90° +φ②当β >φ, P X > F21,滑块作加速运动;当β =φ, P X = F21,动则恒动,静则恒静;当β <φ, P X < F21,原来运动,作减速运动,原来静止,永远静止,称自锁。
③ 自锁条件:β≤φβ=φ,条件自锁(静止);β<φ,无条件自锁。
2.斜面摩擦斜面机构如图,滑块置于升角α的斜面上,摩擦角为φ,作用于滑块上的铅垂力为Q,求滑块等速上升和下降时所需水平平衡力P 和 P’。
(1)求等速上升水平平衡力 PP-驱动力, Q-阻力PQ R 21 0 ,tg ()P,P Qtg () (1)Q( 2)求等速下降水平平衡力 P ’Q -驱动力, P ’-阻力P'Q R 21 0 ,tg () P ',P 'Qtg () (2)Q讨论:① 欲求下滑 (反行程) P ’,只需将式 ( 1)中 P →P ’,φ→ (-φ )② 下滑时,当α >φ, P ’为平衡力α <φ, P ’为负,成为驱动力的一部分,该条件下,若无 P ’,则无论 Q 多大,滑块不下滑,称自锁,自锁条件:α≤φ。


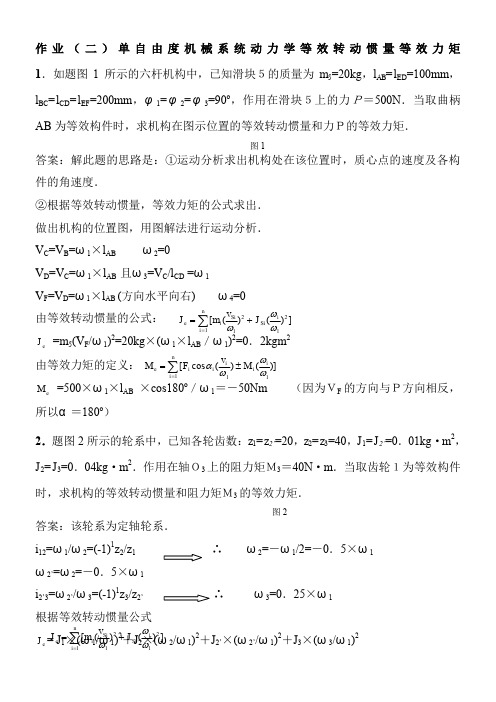
作业(二)单自由度机械系统动力学等效转动惯量等效力矩1.如题图1所示的六杆机构中,已知滑块5的质量为m 5=20kg ,l AB =l ED =100mm ,l BC =l CD =l EF =200mm ,φ1=φ2=φ3=90o ,作用在滑块5上的力P=500N .当取曲柄AB 为等效构件时,求机构在图示位置的等效转动惯量和力P的等效力矩.图1答案:解此题的思路是:①运动分析求出机构处在该位置时,质心点的速度及各构件的角速度.②根据等效转动惯量,等效力矩的公式求出.做出机构的位置图,用图解法进行运动分析.V C =V B =ω1×l AB ω2=0V D =V C =ω1×l AB 且ω3=V C /l CD =ω1V F =V D =ω1×l AB (方向水平向右) ω4=0由等效转动惯量的公式:e J =m 5(V F /ω1)2=20kg ×(ω1×l AB /ω1)2=0.2kgm 2由等效力矩的定义: e M =500×ω1×l AB ×cos180o/ω1=-50Nm (因为VF 的方向与P方向相反,所以α=180o )2.题图2所示的轮系中,已知各轮齿数:z 1=z 2’=20,z 2=z 3=40,J 1=J 2’=0.01kg ·m 2,J 2=J 3=0.04kg ·m 2.作用在轴O3上的阻力矩M3=40N ·m .当取齿轮1为等效构件时,求机构的等效转动惯量和阻力矩M3的等效力矩.图2答案:该轮系为定轴轮系.i 12=ω1/ω2=(-1)1z 2/z 1∴ ω2=-ω1/2=-0.5×ω1ω2’=ω2=-0.5×ω1i 2’3=ω2’/ω3=(-1)1z 3/z 2’ ∴ ω3=0.25×ω1根据等效转动惯量公式e J = J 1×(ω1/ω1)2+J 2×(ω2/ω1)2+J 2’×(ω2’/ω1)2+J 3×(ω3/ω1)2 ∑=+=n i i Si Si i e J v m J 12121]()([ωωω∑=±=n i i i i i i e M v F M 111)]()(cos [ωωωα∑=+=n i i Si Si i e J v m J 12121]()([ωωω=J 1+J 2/4+J 2’/4 +J 3/16=0.01+0.04/4+0.01/4+0.04/16=0.025 kg ·m 2根据等效力矩的公式: e M =M 3×ω3/ω1=40×0.25ω1/ω1=10N ·m3.在题图3所示减速器中,已知各轮的齿数:z 1=z 3=25,z 2=z 4=50,各轮的转动惯量J 1=J 3=0.04kg ·m 2,J 2=J 4=0.16kg ·m 2,(忽略各轴的转动惯量),作用在轴Ⅲ上的阻力矩M 3=100N ·m .试求选取轴Ⅰ为等效构件时,该机构的等效转动惯量J 和M 3的等效阻力矩M r .图3答案:i 12=ω1/ω2=z 2/z 1 ω2=ω1/2 ω3=ω2=ω1/2 i 34=ω3/ω4=z 4/z 3ω4=ω1/4等效转动惯量:J=J 1(ω1/ω1)2+J 2(ω2/ω1)2+J 3(ω3/ω1)2+J 4(ω4/ω1)2=0.042+0.16×(1/2)2+0.04×(1/2)2+0.16×(1/4)2=0.04+0.04+0.01+0.01=0.1 kg ·m 2等效阻力矩:M r =M 3×ω4/ω1=100/4=25(N ·m)4.题图4所示为一简易机床的主传动系统,由一级带传动和两级齿轮传动组成.已知直流电动机的转速n 0=1500r/min ,小带轮直径d =100mm ,转动惯量J d =0.1kg ·m 2,大带轮直径D =200mm ,转动惯量J D =0.3kg ·m 2.各齿轮的齿数和转动惯量分别为:z 1=32,J 1=0.1kg ·m 2,z 2=56,J 2=0.2kg ·m 2,z 2’=32,J 2’=0.4kg ·m 2,z 3=56,J 3=0.25kg ·m 2. 要求在切断电源后2秒,利用装在轴上的制动器将整个传动系统制动住.求所需的制动力矩M 1.图4∑=±=n i i i i i i e M v F M 111()(cos [ωωωα答案:电机的转速n0=1500r/min其角速度ω0=2π×1500/60=50π(rad/s)三根轴的转速分别为:ω1=d×ω0/D=25π(rad/s)ω2=z1×ω1/z2=32×25π/56=1429π(rad/s)ω3=z2’×ω2/z3=32×1429π/56=816π(rad/s)轴的等效转动惯量:J V=J d×(ω0/ω1)2+J D×(ω1/ω1)2+J1×(ω1/ω1)2+J2×(ω2/ω1)2+ J2’×(ω2/ω1)2+ J3×(ω3/ω1)2∴J V=0.1×(50π/25π)2+0.3×12+0.1×12+(0.2+0.1)×(14.29π/25π)2+0.25×(8.16π/25π)2=0.4+0.4+0.098+0.027=0.925 (kg·m2)轴制动前的初始角速度ω1=25π,制动阶段做减速运动,即可求出制动时的角加速度∴ωt=ω0-εt即0=25π-2εε=12.5π则在2秒内制动,其制动力矩M为:M=J V×ε=0.925×12.5=36.31 (kg·m)5.在题图5所示定轴轮系中,已知各轮齿数为:z1=z2’=20,z2=z3=40;各轮对其轮心的转动惯量分别为J1=J2’=0.01kg·m2,J2=J3=0.04kg·m2;作用在轮1上的驱动力矩M d=60N·m,作用在轮3上的阻力矩M r=120N·m.设该轮系原来静止,试求在M d和M r作用下,运转到t=15s时,轮1的角速度ω1和角加速度α1.图5答案:i12=ω1/ω2=(-1)1×z2/z1 ω2=-ω1/2i13=ω1/ω3=(-1)2×z2×z3/z1×z2’ω3=20×20×ω1/40×40=ω1/4轮1的等效力矩M为:M=M d×ω1/ω1+M r×ω3/ω1 =60×1-120/4=30 N·m轮1的等效转动惯量J为:J=J1(ω1/ω1)2+(J2’+J2)(ω2/ω1)2+J3(ω3/ω1)2=0.01×1+(0.01+0.04)/4+0.04/16=0.025 (kg·m2)∵M=J ×ε∴角加速度ε=M/J=1200 (rad/s2)初始角速度ω0=0 ∴ω1=ω0+ε×tω=1200×1.5=1800(rad/s)。
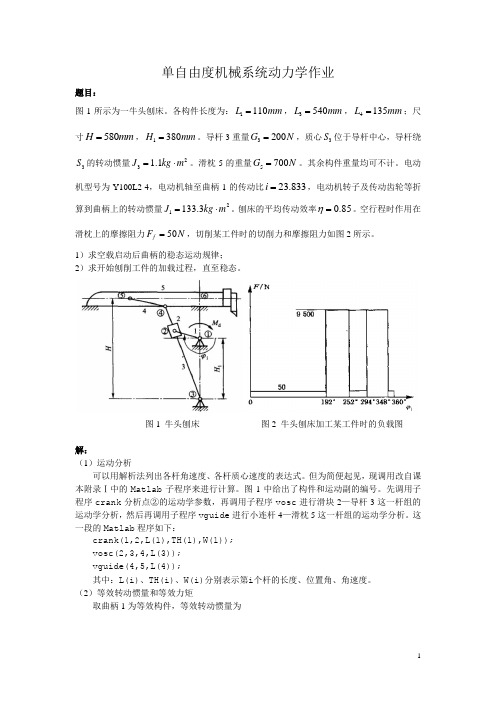
单自由度机械系统动力学作业题目:图1所示为一牛头刨床。
各构件长度为:1110L mm =,3540L mm =,4135L mm =;尺寸580H mm =,1380H mm =。
导杆3重量3200G N =,质心3S 位于导杆中心,导杆绕3S 的转动惯量23 1.1J kg m =⋅。
滑枕5的重量5700G N =。
其余构件重量均可不计。
电动机型号为Y100L2-4,电动机轴至曲柄1的传动比23.833i =,电动机转子及传动齿轮等折算到曲柄上的转动惯量21133.3J kg m =⋅。
刨床的平均传动效率0.85η=。
空行程时作用在滑枕上的摩擦阻力50f F N =,切削某工件时的切削力和摩擦阻力如图2所示。
1)求空载启动后曲柄的稳态运动规律; 2)求开始刨削工件的加载过程,直至稳态。
图1 牛头刨床 图2 牛头刨床加工某工件时的负载图 解:(1)运动分析可以用解析法列出各杆角速度、各杆质心速度的表达式。
但为简便起见,现调用改自课本附录Ⅰ中的Matlab 子程序来进行计算。
图1中给出了构件和运动副的编号。
先调用子程序crank 分析点②的运动学参数,再调用子程序vosc 进行滑块2—导杆3这一杆组的运动学分析,然后再调用子程序vguide 进行小连杆4—滑枕5这一杆组的运动学分析。
这一段的Matlab 程序如下:crank(1,2,L(1),TH(1),W(1)); vosc(2,3,4,L(3)); vguide(4,5,L(4)); 其中:L(i)、TH(i)、W(i)分别表示第i 个杆的长度、位置角、角速度。
(2)等效转动惯量和等效力矩取曲柄1为等效构件,等效转动惯量为2223335513111()()()S e J J J G v G v g g ωωωω=+++ (a) 式中:g 为重力加速度,3S v 为导杆3质心的速度,5v 为滑枕的速度。
等效驱动力矩可由电动机机械特性导出,设m M 、de M 分别为电动机输出力矩和等效驱动力矩,两者有如下关系:de m M iM = (b)式中i 为电动机轴和曲轴间的传动比。



结构动力计算课后习题答案结构动力计算是土木工程和机械工程领域中的一个重要分支,它涉及到结构在动力作用下的响应分析。
这门课程的课后习题通常要求学生运用所学的理论,解决实际工程问题。
以下是一些可能的习题答案示例,请注意,这些答案是基于假设的习题内容,实际的习题答案应根据具体的题目来确定。
习题1:单自由度系统的动力响应假设有一个单自由度系统,其质量为m,阻尼系数为c,刚度系数为k。
系统受到一个简谐激励F(t) = F0 * sin(ωt),其中F0是激励力的幅值,ω是激励频率。
求系统的稳态响应。
答案:对于单自由度系统,其运动方程可以表示为:\[ m\ddot{x}(t) + c\dot{x}(t) + kx(t) = F_0 \sin(\omega t) \]稳态响应可以通过求解上述方程的特解来获得。
特解的形式为:\[ x(t) = X \sin(\omega t + \phi) \]其中,振幅X和相位角φ可以通过以下公式计算:\[ X = \frac{F_0}{\sqrt{(\omega^2 m - \omega^2)^2 +(c\omega)^2}} \]\[ \phi = \arctan\left(\frac{c\omega}{\omega^2 m -\omega^2}\right) \]习题2:多自由度系统的模态分析考虑一个两自由度系统,其质量矩阵、刚度矩阵和阻尼矩阵分别为:\[ M = \begin{bmatrix} m_1 & 0 \\ 0 & m_2 \end{bmatrix},\quad K = \begin{bmatrix} k_1 & k_c \\ k_c & k_2\end{bmatrix}, \quad C = \begin{bmatrix} c_1 & 0 \\ 0 & c_2\end{bmatrix} \]求系统的自然频率和模态形状。

第二章习题2- 1如图2-1所示,长度为L 、质量为m 的均质刚性杆由两根刚度为k 的弹簧系住,求杆绕O 点微幅振动的微分方程。
222...2..011T J 2231V 2(sin )(1cos )222()0m 0322ml L Lk mg dT V dtmg k L θθθθθθθ==⋅=⋅+-+=⎛⎫++= ⎪⎝⎭解:设系统处于静平衡位置时势能为,当杆顺时针偏转角时动能:势能:由能量守恒原理,得化简得:2- 2如图2-2所示,质量为m 、半径为r 的圆柱体,可沿水平面作纯滚动,它的圆心O 用刚度为k 弹簧相连,求系统的振动微分方程。
22 (2)2..0111T J ,2221V ()2()03m 02m r J mr k r dT V dtk θθθθθθ⎛⎫=+= ⎪⎝⎭=+=+=解:设系统处于静平衡位置时势能为,当杆顺时针偏转角时动能:势能:由能量守恒原理,得化简得:2- 3如图2-3所示,质量为m 、半径为R 的圆柱体,可沿水平面作纯滚动,与圆心O 距离为a 处用两根刚度为k 的弹簧相连,求系统作微振动的微分方程。
图2- 1 图2- 22.222..220111T J ,2221V (2)[()]2()032()02m R J mR k R a dT V dt mR k R a θθθθθ⎛⎫=+= ⎪⎝⎭=⋅++=++=解:设系统处于静平衡位置时势能为动能:势能:由能量守恒原理,得化简得: 2- 4求图2-4所示弹簧-质量-滑轮系统的振动微分方程(假设滑轮与绳索间无滑动)。
2.222....0111T J ,2221V ()2()0()02m r J Mr k r dT V dt x r x r M m x kx θθθθθ⎛⎫=+= ⎪⎝⎭=⋅+===++=解:设系统处于静平衡位置时势能为动能:势能:由能量守恒原理,得其中,,化简得: 2- 5质量可忽略的刚性杆-质量-弹簧-阻尼器系统参数如图2-5所示,2L 杆处于铅垂位置时系统静平衡,求系统作微振动的微分方程。
第二章习题2- 1如图2-1所示,长度为L 、质量为m 的均质刚性杆由两根刚度为k 的弹簧系住,求杆绕O 点微幅振动的微分方程。
222...2..011T J 2231V 2(sin )(1cos )222()0m 0322ml L Lk mg dT V dtmg k L θθθθθθθ==⋅=⋅+-+=⎛⎫++= ⎪⎝⎭解:设系统处于静平衡位置时势能为,当杆顺时针偏转角时动能:势能:由能量守恒原理,得化简得:2- 2如图2-2所示,质量为m 、半径为r 的圆柱体,可沿水平面作纯滚动,它的圆心O 用刚度为k 弹簧相连,求系统的振动微分方程。
22 (2)2..0111T J ,2221V ()2()03m 02m r J mr k r dT V dtk θθθθθθ⎛⎫=+= ⎪⎝⎭=+=+=解:设系统处于静平衡位置时势能为,当杆顺时针偏转角时动能:势能:由能量守恒原理,得化简得:2- 3如图2-3所示,质量为m 、半径为R 的圆柱体,可沿水平面作纯滚动,与圆心O 距离为a 处用两根刚度为k 的弹簧相连,求系统作微振动的微分方程。
图2- 1 图2- 22.222..220111T J ,2221V (2)[()]2()032()02m R J mR k R a dT V dt mR k R a θθθθθ⎛⎫=+= ⎪⎝⎭=⋅++=++=解:设系统处于静平衡位置时势能为动能:势能:由能量守恒原理,得化简得: 2- 4求图2-4所示弹簧-质量-滑轮系统的振动微分方程(假设滑轮与绳索间无滑动)。
2.222....0111T J ,2221V ()2()0()02m r J Mr k r dT V dt x r x r M m x kx θθθθθ⎛⎫=+= ⎪⎝⎭=⋅+===++=解:设系统处于静平衡位置时势能为动能:势能:由能量守恒原理,得其中,,化简得: 2- 5质量可忽略的刚性杆-质量-弹簧-阻尼器系统参数如图2-5所示,2L 杆处于铅垂位置时系统静平衡,求系统作微振动的微分方程。

第二章刚性构件组成的单自由度机械系统动力学§2.1 引言本章和第三章首先研究忽略构件弹性变形的理想机械系统的动力学问题。
即在研究时,近似认为组成这类理想机械系统的构件都是刚体,并忽略运动副中间隙的影响,运动副中的摩擦在通常情况也是被忽略的。
作出上述简化的目的是为了能够忽略一些次要因素,以突出问题的主要方面。
当机械中各构件的刚度较大且运转速度不是很高时,作出这些简化是合理的,所得到的结果有很好的实用价值。
本章将研究单自由度机械系统的动力学问题。
目前单自由度机械应用最为广泛,然而由于各种自动机和机器人的出现,刚性构件组成的多自由度机械系统动力学的研究也变得越来越重要,所以在下一章还要进一步研究二自由度机械系统动力学问题。
考虑构件弹性变形时的动力学问题将在后续章节中研究。
本章主要介绍用等效力学模型进行研究的方法,该方法适用于单自由度系统的研究,目前在工程上被广泛应用。
在研究时,首先把实际机械系统简化成等效的单构件力学模型,并根据该模型列出运动方程式,然后对运动微分方程式进行求解和讨论。
§2.2 驱动力和工作阻力除重力、摩擦力之外,作用在机械上的力主要还有工作阻力和驱动力,它们随着机械工作情况及使用的原动机的不同而多种多样。
为了研究在力作用下机械的运动,可将作用力按机械特性进行分类。
所谓机械特性是指力(或力矩)和运动学参数(位移、速度、时间等)之间的关系。
本书中,所有的外力都假设为是预先已知的,即假设发动机和工作机的机械特性是预先给定的。
在工作机械中,按机械特性来分,常见的工作阻力有以下几种:1)工作阻力是常数。
如起重机的有效工作负荷为起吊重量(为常数),机床的制动力矩,通常也可简化为常数。
2)工作阻力随位移而变化。
如往复式压缩机中活塞上作用的阻力,曲柄压力机滑块上受到的阻力等。
3)工作阻力随速度而变化。
如鼓风机、离心泵的工作阻力。
4)工作阻力随时间而变化。
如揉面机的工作阻力。
在发动机中,按其机械特性进行分类,常见的驱动力有以下几种:1)驱动力是常数。



§3 单自由度机械系统的动力学分析1e 21111111d d 21F qq J q J =+ 一、基于拉格朗日方程的动力学方程☐若 q 1 为位移,则 J 11 称为等效质量 ( m e ),F e1称为等效力 ( F e ) ;☐若 q 1 为角位移,则 J 11 称为等效转动惯量 ( J e ),F e1称为等效力矩 ( M e ) 。
∑∑==⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫⎝⎛+⎪⎪⎭⎫⎝⎛=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎪⎭⎫⎝⎛+⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫⎝⎛=n j j S S j n j jS S S jq J q v m q J q y q x m J j j j j j 12121121212111d d d d d d ωϕ∑∑∑∑====±+=±+⎪⎪⎭⎫ ⎝⎛+=l j m k k kj j j lj m k kk j jy j jx q M q v F q M q y F q x F F 1111111111e cos ωθω单自由度机械系统的动力学分析“±” 取决于 M k 与的方向是否相同,相同为“+”, 相反则为“-” 。
k ω1. 等效动力学模型二、基于等效动力学模型的动力学方程单自由度机械系统的动力学分析☐单自由度机械系统仅有一个广义坐标,无论其组成如何复杂,均可将其简化为一个等效构件。
等效构件的角位移(位移)即为系统的广义坐标。
☐等效构件的等效质量(等效转动惯量)所具有的动能,应等于机械系统的总动能;等效构件上的等效力(等效力矩)所产生的功率,应等于机械系统的所有外力与外力矩所产生的总功率。
单自由度机械系统的动力学分析定轴转动构件 直线移动构件求出位移 S 或角位移的变化规律,即可获得系统中各构件的真实运动。
等效转动惯量等效质量等效力等效力矩☐等效量不仅与各运动构件的质量、转动惯量及作用于系统的外力、外力矩有关,而且与各运动构件与等效构件的速比有关,但与机械系统的真实运动无关;☐等效力(等效力矩)只是一个假想的力(力矩),并非作用于系统的所有外力的合力(外力矩的合力矩);等效质量(等效转动惯量)也只是一个假想的质量(或转动惯量),它并不是系统中各构件的质量(或转动惯量)的总和。


作业(二)单自由度机械系统动力学等效转动惯量等效力矩
1.如题图1所示的六杆机构中,已知滑块5的质量为m 5=20kg ,l AB =l ED =100mm ,l BC =l CD =l EF =200mm ,φ1=φ2=φ3=90o ,作用在滑块5上的力P=500N .当取曲柄AB 为等效构件时,求机构在图示位置的等效转动惯量和力P的等效力矩.
图1
答案:解此题的思路是:①运动分析求出机构处在该位置时,质心点的速度及各构件的角速度.
②根据等效转动惯量,等效力矩的公式求出.
做出机构的位置图,用图解法进行运动分析.
V C =V B =ω1×l AB ω2=0
V D =V C =ω1×l AB 且ω3=V C /l CD =ω1
V F =V D =ω1×l AB (方向水平向右) ω4=0
由等效转动惯量的公式: e J =m 5(V F /ω1)2=20kg ×(ω1×l AB /ω1)2=0.2kgm 2
由等效力矩的定义: e M =500×ω1×l AB ×cos180o /ω1=-50Nm (因为VF 的方向与P方向相反,所以α=180o )
∑=+=n i i Si Si i e J v m J 121
21])()(
[ωωω∑=±=n i i i i i i e M v F M 11
1)]()(
cos [ωωωα
2.题图2所示的轮系中,已知各轮齿数:z 1=z 2’=20,z 2=z 3=40,J 1=J 2’=0.01kg ·m 2,J 2=J 3=0.04kg ·m 2.作用在轴O3上的阻力矩M3=40N ·m .当取齿轮1为等效构件时,求机构的等效转动惯量和阻力矩M3的等效力矩.
图2
答案:该轮系为定轴轮系.
i 12=ω1/ω2=(-1)1z 2/z 1 ∴ ω2=-ω1/2=-0.5×ω1 ω2’=ω2=-0.5×ω1
i 2’3=ω2’/ω3=(-1)1z 3/z 2’ ∴ ω3=0.25×ω1 根据等效转动惯量公式
e J = J 1×(ω1/ω1)2+J 2×(ω2/ω1)2+J 2’×(ω2’/ω1)2+J 3×(ω3/ω1)2 =J 1+J 2/4+J 2’/4 +J 3/16
=0.01+0.04/4+0.01/4+0.04/16
=0.025 kg ·m 2
根据等效力矩的公式: e M =M 3×ω3/ω1=40×0.25ω1/ω1=10N ·m
3.在题图3所示减速器中,已知各轮的齿数:z 1=z 3=25,z 2=z 4=50,各轮的转动惯量J 1=J 3=0.04kg ·m 2,J 2=J 4=0.16kg ·m 2,(忽略各轴的转动惯量),作用在轴Ⅲ上的阻力矩M 3=100N ·m .试求选取轴
∑=+=n i i Si Si i e J v m J 121
21])((
[ωωω∑=±=n i i i i i i e M v F M 11
1)]()(
cos [ωωωα
Ⅰ为等效构件时,该机构的等效转动惯量J和M3的等效阻力矩M r.
图3
答案:i12=ω1/ω2=z2/z1ω2=ω1/2 ω3=ω2=ω1/2
i34=ω3/ω4=z4/z3ω4=ω1/4
等效转动惯量:
J=J1(ω1/ω1)2+J2(ω2/ω1)2+J3(ω3/ω1)2+J4(ω4/ω1)2
=0.042+0.16×(1/2)2+0.04×(1/2)2+0.16×(1/4)2
=0.04+0.04+0.01+0.01
=0.1kg·m2
等效阻力矩:
M r=M3×ω4/ω1=100/4=25(N·m)
4.题图4所示为一简易机床的主传动系统,由一级带传动和两级齿轮传动组成.已知直流电动机的转速n0=1500r/min,小带轮直径d=100mm,转动惯量J d=0.1kg·m2,大带轮直径D=200mm,转动惯量J D=0.3kg·m2.各齿轮的齿数和转动惯量分别为:z1=32,
J1=0.1kg·m2,z2=56,J2=0.2kg·m2,z2’=32,J2’=0.4kg·m2,z3=56,J3=0.25kg·m2.
要求在切断电源后2秒,利用装在轴上的制动器将整个传动系统制动住.求所需的制动力矩M1.
图4
答案:电机的转速n0=1500r/min
其角速度ω0=2π×1500/60=50π(rad/s)
三根轴的转速分别为:
ω1=d×ω0/D=25π(rad/s)
ω2=z1×ω1/z2=32×25π/56=1429π(rad/s)
ω3=z2’×ω2/z3=32×1429π/56=816π(rad/s)
轴的等效转动惯量:
J V=J d×(ω0/ω1)2+J D×(ω1/ω1)2+J1×(ω1/ω1)2+J2×(ω2/ω1)2+ J2’×(ω2/ω1)2+ J 3×(ω3/ω1)2
∴J V=0.1×(50π/25π)2+0.3×12+0.1×12+(0.2+0.1)×(14.29π/25π)2+0.25×(8.16π/25π)2
=0.4+0.4+0.098+0.027
=0.925 (kg·m2)
轴制动前的初始角速度ω1=25π,制动阶段做减速运动,即可求出制动时的角加速度
∴ωt=ω0-εt即0=25π-2ε
ε=12.5π
则在2秒内制动,其制动力矩M为:
M=J V×ε=0.925×12.5=36.31 (kg·m)
5.在题图5所示定轴轮系中,已知各轮齿数为:z1=z2’=20,z2=z3=40;各轮对其轮心的转动惯量分别为J1=J2’=0.01kg·m2,J2=J3=0.04kg·m2;作用在轮1上的驱动力矩M d=60N·m,作用在轮3上的阻力矩M r=120N·m.设该轮系原来静止,试求在M d和M r 作用下,运转到t=15s时,轮1的角速度ω1和角加速度α1.
图5
答案:i12=ω1/ω2=(-1)1×z2/z1 ω2=-ω1/2
i13=ω1/ω3=(-1)2×z2×z3/z1×z2’ω3=20×20×ω1/40×40=ω1/4
轮1的等效力矩M为:
M=M d×ω1/ω1+M r×ω3/ω1 =60×1-120/4=30 N·m
轮1的等效转动惯量J为:
J=J1(ω1/ω1)2+(J2’+J2)(ω2/ω1)2+J3(ω3/ω1)2=0.01×1+(0.01+0.04)/4+0.04/16=0.025 (kg·m2)
∵M=J ×ε∴角加速度ε=M/J=1200 (rad/s2)
初始角速度ω0=0 ∴ω1=ω0+ε×t
ω
=1200×1.5=1800(rad/s)。