sja1000连接图参考
- 格式:pdf
- 大小:73.69 KB
- 文档页数:2

手把手教你设计CAN总线系列讲座(2)—CAN总线智能节点的设计在远程测控系统中,都要通过传感器或其他测量装置获取环境或相关的输入参数,传送到处理器,经过一定的算法,做出相应的控制决策,启动执行机构对系统进行控制,基于CAN总线的测控系统将单个测控设备变成网络节点,将控制系统中所需的基本控制、运行参数修改、报警、显示和监控等功能分散到各个远程节点中。
因此总线上的节点应该具有总线通信功能和测控功能,这必然离不开微处理器。
我们把具有这类功能的节点叫智能节点。
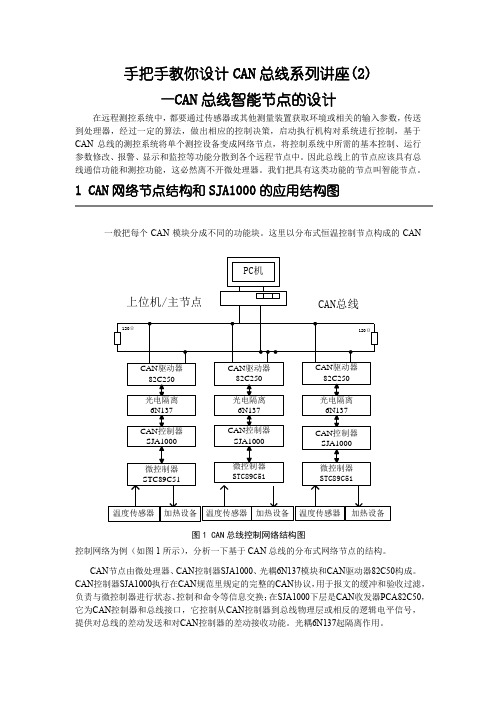
1 CAN网络节点结构和SJA1000的应用结构图一般把每个CAN模块分成不同的功能块。
这里以分布式恒温控制节点构成的CAN图1 CAN总线控制网络结构图控制网络为例(如图1所示),分析一下基于CAN总线的分布式网络节点的结构。
CAN节点由微处理器、CAN控制器SJA1000、光耦6N137模块和CAN驱动器82C50构成。
CAN控制器SJA1000执行在CAN规范里规定的完整的CAN协议,用于报文的缓冲和验收过滤,负责与微控制器进行状态、控制和命令等信息交换;在SJA1000下层是CAN收发器PCA82C50,它为CAN控制器和总线接口,它控制从CAN控制器到总线物理层或相反的逻辑电平信号,提供对总线的差动发送和对CAN控制器的差动接收功能。
光耦6N137起隔离作用。
图2 SJA1000的结构图所有这些CAN模块都由微处理器控制,它负责执行应用的功能,负责控制执行器(比如加热设备)、读传感器(比如温度)和处理人机接口。
如图2是SJA1000的应用结构图。
在CAN规范里,CAN核心模块控制CAN帧的发送和接收。
接口管理逻辑负责连接外部微处理器,该控制器可以是单片机、DSP或其他器件。
经过SJA1000复用的地址/数据总线访问寄存器和控制读写选通信号。
SJA1000的发送缓冲器能够存储一个完整的报文(扩展的或标准的)。
当微处理器初始化发送接口管理逻辑,CAN核心模块就会从发送缓冲器读CAN报文。

基于SJA1000的CAN节点设计文件信息类别内容关键词SJA1000,CTM系列隔离CAN收发器基于SJA1000的CAN节点设计摘要修订历史版本日期原因Rev X1 2006-12-13 内部制定初稿Rev 1.0 2006-12-15 第一次发布目录1. 基于SJA1000的CAN节点设计 (3)1.1 硬件设计电路 (3)1.1.1收发器隔离电路设计 (3)1.1.2 CAN总线接口设计 (4)1.2 软件设计 (5)程序清单1.1 定义片选地址 (5)程序清单1.2 初始化SJA1000 (5)程序清单1.3 发送报文 (6)2. 应用实例 (7)3. 声明 (1)1.基于SJA1000的CAN节点设计1.1 硬件设计电路CAN总线是一种最有前途的现场总线,因其优异性能而在工业控制、汽车电子、安防等方面得到广泛应用。
设计CAN-bus通讯接口是很重要的一个环节,设备的正确运行与其密切相关。
如图 1.1给出了一个实际的CAN-bus通讯单元电路图,电路结构为:MCU(P89C52)+CAN控制器(SJA1000)+隔离CAN收发器(CTM Module)。
图 1.1 CAN-bus通讯单元原理图如图 1.1所示,整个系统电源采用+5V电源输入,上电复位芯片(CAT810L)可保证上电时正确的启动系统。
微处理器采用PHILIPS的P89C52单片机,该系列单片机是80C51微控制器的派生器件,采用先进的CMOS工艺制造,指令系统与80C51完全相同。
CAN控制器采用PHILIPS的SJA1000,SJA1000是一款独立的控制器,用于汽车和一般工业环境中的控制器局域网络。
它是PHILIPS半导体PCA82C200 CAN控制器(BasicCAN)的替代产品。
而且,它增加了一种新的工作模式(PeliCAN),这种模式支持具有很多新特性的CAN 2.0B 协议,是目前市面上用的最广的一款CAN控制器。



SJA1000简介2010SJA1000简介2010-3-17 5:57:00PCA82C250提供对总线的差动发送和对CAN控制器的差动接收功能,也增大了通信距离,提高了系统的瞬间抗干扰能力,保护总线,降低射频干扰(RFI),实现了热防护等功能。
发送子程序负责节点报文的发送,由CAN控制器SJA1000独立完成,将命令寄存器里的发送请求标志置位,即可发送SJA1000发送缓冲区中的报文。
CAN总线及CAN控制器SJA1000简介CAN总线最初是德国Bosch公司在1986 年为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种支持分布式实时控制系统的串行数据通讯总线。
CAN总线与其它通信网的显著不同之处在于:(1)报文传送中不包含目标地址,它是以全网广播为基础,各接收站根据报文中反映数据性质的标识符过滤报文,该收的收下,不收的弃用。
其好处是可线上网下网、即插即用和多站接收。
(2)特别强化了对数据安全性的关注,满足控制系统及其它较高数据要求的系统需求。
另外CAN总线采用短帧结构,借助接收滤波的多地址帧传送,受干扰概率低,每帧信息都有CRC校验及其它检错措施。
响应远程数据请求,配置灵活,具有全系统的数据相容性。
节点数主要取决于总线驱动电路,目前最多可达110个节点。
CAN总线符合ISO11898标准,通信速率高,最大传输速率可达1Mbit/S,最大传输距离为10km,传输介质可为双绞线。
基于CAN总线以上的特点,把它应用于系统分布比较分散且需要在同一总线上挂接多个节点的场合是非常适合的。
目前广泛流行的CAN总线器件有两大类:一类是独立的CAN控制器,如PhilipS 公司的PCA82C200,SJA1000及Intel82256/82257等;另一类是带有在片CAN的微控制器,如P8XC582等。
其中Philips公司的PCA82C200是符合CAN2. 0A协议的总线控制器,SJA1000是它的替代产品,它是应用于汽车和一般工业环境的独立CAN总线控制器。
摘要介绍了采用PHILIP公司生产的控制器局域网的高度集成的通信控制器SJA1000和82C250作为收发器的CAN总线接口电路的硬件设计方法,介绍了控制器和收发器及看门狗芯片的特点、内部结构、寄存器结构及地址分配,说明一种通用型CAN总线的设计和开发.探讨应用中需注意的一些问题。
关键词:CAN总线;控制器;收发器;电路设计目次摘要 (I)1 绪论 (1)1.1 CAN总线简介 (1)1.1.1 CAN协议 (1)1.1.2电气参数及信号表示 (2)1.2 CAN的主要技术特点 (2)1.3 CAN总线通信系统拓扑结构 (3)2 CAN总线接口电路设计 (3)2.1 总体方案设计 (3)2.2 各模块电路的设计 (4)2.2.1单片机最小系统 (4)2.2.2 CAN总线接口控制电路设计 (5)2.2.2.1SJA1000简介 (5)2.2.2.2基于SJA1000的控制电路设计 (10)2.2.3 CAN总线收发电路设计 (11)2.2.3.1CAN总线收发器82C250介绍 (11)2.2.3.2基于82C250收发电路设计 (14)2.2.4复位、监控电路设计 (15)2.2.4.1X5045P简介 (15)2.2.4.2基于X5045P的电路设计 (18)2.2.5电源设计 (18)2.3 接口电路总体电路原理图 (19)3 结束语 (21)参考文献 (22)附录1: 接口电路总体电路原理图 (23)1 绪论1.1 CAN总线简介CAN[Control(Controller) Area Network]是控制(器)局域网的简称。
CAN是一种有效支持分布式控制或实时控制的串行通信网络,最初由德国Bosch公司80年代用于汽车内部测试和控制仪器之间的数据通信。
目前CAN 总线规范已被国际标准化组织ISO制订为国际标准ISO11898,并得到了Motorola,Intel ,Philips等大半导体器件生产厂家的支持,迅速推出各种集成有CAN协议的产品。