数字图像处理实验三(邻域平均法和中值滤波)
- 格式:doc
- 大小:88.50 KB
- 文档页数:1
数字图像处理基础实验指导书
信息工程学院
2013年4月16日
实验三中值滤波
一.实验目的
1.熟悉matlab图像处理工具箱及中值滤波函数的使用;
2.理解和掌握中值滤波的方法和应用;
二.实验设备
1、PC机一台;
2、软件MATLAB;
三.实验内容及步骤
1. 启动matlab
双击桌面matlab图标启动matlab环境;
2. 在matlab命令窗口中输入相应程序。
书写程序时,首先读取图像,一般调用matlab 自带的图像,如:cameraman图像;给图像添加不同的噪声;再调用相应的图像增强(中值滤波)函数,设置参数;最后输出处理后的图像;
3.浏览源程序并理解含义;
4.运行,观察显示结果;
5.结束运行,退出;
四.实验参考程序及结果
在matlab环境中,程序首先读取图像,然后调用图像增强(中值滤波)函数,设置相关参数,再输出处理后的图像。
I = imread('cameraman.tif');
figure,imshow(I);
J1=imnoise(I,‘salt& pepper’,0.2);%添加椒盐噪声
J2= imnoise(I,‘gaussian’,0,0.005);%添加高斯噪声
J11=medfilt2(J1,[5,5]);
J22=medfilt2(J2,[5,5]);
figure,imshow(J11);
figure,imshow(J22);
五.实验报告要求
1、记录实验过程
2、给出完整结果(包括读入图像、加噪图像和滤波后的图像)。
数字图像处理实验报告(邻域平均法和中值滤波法)数字图像处理实验报告班级:姓名:学号:日期:邻域平均法和中值滤波处理一、实验目的图像变换是数字图像处理中的一种综合变换,如直方图变换、几何变换等。
通过本实验,使得学生掌握两种变换的程序实现方法。
二、实验任务请设计程序,分别用邻域平均法,其模板为:和中值滤波法对testnoise 图像进行去噪处理(中值滤波的模板的大小也设为3X 3)。
三、实验环境本实验在Windows 平台上进行,对内存及cpu 主频无特别要求,使用VC或者MINGW (gcc)编译器均可。
四、设计思路介绍代码的框架结构、所用的数据结构、各个类的介绍(类的功能、类中方法的功能、类的成员变量的作用)、各方法间的关系写。
在此不进行赘述。
五、具体实现实现设计思路中定义的所有的数据类型,对每个操作给出实际算法。
对主程序和其他模块也都需要写出实际算法。
代码:<邻域平均法>(3*3)#include#include#include#include "hdr.h" /* ------ 定义结构指针--- */struct bmphdr *hdr;// 定义用于直方图变量unsigned char *bitmap,*count,*new_color; /* ---- main() 函数编--- */ int main(){ //定义整数i,j 用于函数循环时的,nr_pixels 为图像中像素的个数int i, j ,nr_pixels,nr_w,nr_h; // 定义两个文件指针分别用于提取原图的数据和生成直方图均衡化后的图像FILE *fp, *fpnew; // 定义主函数的参数包括:输入的位图文件名和输出的位图文件名,此处内容可以不要,在DOS下执行命令的时候再临时输入也可,为了方便演示,我这里直接把函数的参数确定了。
//argc=3; //argv[1]="test.bmp"; //argv[2]="testzf.bmp"; // 参数输入出错显示/* if (argc != 3) {printf("please input the name of input and out bitmap files\n");exit(1);}*/// 获取位图文件相关信息// hdr = get_header(argv[1]); hdr = get_header("testnoise.bmp");if (!hdr) exit(1); // 以二进制可读方式打开输入位图文件fp = fopen("testnoise.bmp", "rb");if (!fp) {printf("File open error!\n");exit(1);} // 文件指针指向数据区域fseek(fp, hdr->offset, SEEK_SET)计算位图像素的个数nr_pixels = hdr->width * hdr->height;nr_w = hdr->width;nr_h = hdr->height;bitmap = malloc(nr_pixels);new_color = malloc(nr_pixels);count = malloc((nr_w+2)*(+nr_h+2));//读取位图数据到bitmap 中fread(bitmap, nr_pixels, 1, fp);fclose(fp);// 因为图像边缘无法使用邻域平均,所以根据邻近颜色填补图像的周围一圈,存入count[] 数组中// 中心图像存入count[] for(i=nr_w+3;i<(nr_w+2)*(+nr_h+2)-nr_w-3;i++) { j=i/(nr_w+2);if(i%(nr_w+2)!=0&&(i+1)%(nr_w+2)!=0) count[i]=bitmap[i-nr_w-1-2*j]; } // 填补第一排for(i=1;i} // 填补最后一排for(i=1;i} // 填补左边一排for(i=0;i} // 填补右边一排for(i=0;i<nr_h+3;i++)< p="">{ count[(i+1)*(nr_w+2)-1]=count[(i+1)*(nr_w+2)-2];}// 邻域平均3*3for(j=nr_w+3,i=0;j<(nr_w+2)*(+nr_h+2)-nr_w-3;j++) {if(j%(nr_w+2)!=0&&(j+1)%(nr_w+2)!=0)new_color[i]=(count[j]+count[j-1]+count[j+1]+count[j-nr_w-2]+count[j-1-nr_w-2]+count[j+1-nr_w-2]+count[j+nr_w+2]+count[j-1+nr_w+2]+count[j+1+nr_w+2])/9,i++; } //结果存入bitmap[] 中for (i = 0; i < nr_pixels; i++;bitmap[i]=new_color[i]; // 打开一个以输出文件名命名的文件,设为可写的二进制形式fpnew = fopen("test_lynoise.bmp", "wb+");// 由于位图文件的头部信息并没有因直方图均衡化而改变,因此输出图像的头部信息从原位图文件中拷贝即可:fwrite(hdr->signature, 2, 1, fpnew); fwrite(&hdr->size, 4, 1, fpnew);fwrite(hdr->reserved, 4, 1, fpnew); fwrite(&hdr->offset, 4, 1, fpnew); fwrite(&hdr->hdr_size, 4, 1, fpnew); fwrite(&hdr->width, 4, 1, fpnew); fwrite(&hdr->height, 4, 1, fpnew); fwrite(&hdr->nr_planes, 2, 1, fpnew); fwrite(&hdr->bits_per_pixel, 2, 1, fpnew); fwrite(&hdr->compress_type, 4, 1, fpnew); fwrite(&hdr->data_size, 4, 1, fpnew); fwrite(&hdr->resol_hori, 4, 1, fpnew); fwrite(&hdr->resol_vert, 4, 1, fpnew);fwrite(&hdr->nr_colors, 4, 1, fpnew); fwrite(&hdr->important_color, 4, 1, fpnew); if (hdr->offset > 54) fwrite(hdr->info, (hdr->offset - 54), 1, fpnew); // 直方图均衡化的数据(bitmap) 赋值fwrite(bitmap, nr_pixels, 1, fpnew);// 关闭fclose(fpnew);// 释放内存(优化程序必需) free(hdr);free(bitmap);</nr_h+3;i++)<>。
中值滤波和均值滤波中值滤波和均值滤波是数字图像处理中常用的两种滤波方法,它们在图像去噪和平滑处理中起着重要的作用。
本文将从原理、应用以及优缺点等方面介绍这两种滤波方法。
一、中值滤波中值滤波是一种非线性滤波方法,其基本原理是用像素点周围邻域内的中值来代替该像素点的灰度值。
中值滤波可以有效地去除图像中的椒盐噪声和脉冲噪声,同时能够保持图像的边缘信息。
其处理过程如下:1.选取一个模板,模板的大小根据噪声的程度来确定;2.将模板中的像素点按照灰度值大小进行排序,取其中位数作为中心像素点的灰度值;3.将中心像素点的灰度值替换为中值;4.重复以上步骤,对整个图像进行滤波。
中值滤波的优点是能够有效地去除椒盐噪声和脉冲噪声,同时保持图像的边缘信息。
然而,中值滤波也存在一些缺点,例如不能处理高斯噪声和均匀噪声,对图像细节信息的保护效果较差。
二、均值滤波均值滤波是一种线性平滑滤波方法,其基本原理是用像素点周围邻域内的平均值来代替该像素点的灰度值。
均值滤波可以有效地去除高斯噪声和均匀噪声,同时能够保持图像的整体平滑。
其处理过程如下:1.选取一个模板,模板的大小根据滤波效果来确定;2.计算模板内所有像素点的灰度值的平均值;3.将中心像素点的灰度值替换为平均值;4.重复以上步骤,对整个图像进行滤波。
均值滤波的优点是能够有效地去除高斯噪声和均匀噪声,同时能够保持图像的整体平滑。
然而,均值滤波也存在一些缺点,例如不能处理椒盐噪声和脉冲噪声,对图像细节信息的保护效果较差。
中值滤波和均值滤波在图像处理中各有优劣。
中值滤波适用于去除椒盐噪声和脉冲噪声,能够保持图像的边缘信息,但在处理高斯噪声和均匀噪声时效果较差。
而均值滤波适用于去除高斯噪声和均匀噪声,能够保持图像的整体平滑,但对于细节信息的保护效果较差。
在实际应用中,根据图像的特点和噪声的类型选择合适的滤波方法是很重要的。
如果图像受到椒盐噪声和脉冲噪声的影响,可以选择中值滤波进行去噪处理;如果图像受到高斯噪声和均匀噪声的影响,可以选择均值滤波进行平滑处理。
目录实验一:数字图像的基本处理操作 (4):实验目的 (4):实验任务和要求 (4):实验步骤和结果 (5):结果分析 (8)实验二:图像的灰度变换和直方图变换 (9):实验目的 (9):实验任务和要求 (9):实验步骤和结果 (9):结果分析 (13)实验三:图像的平滑处理 (14):实验目的 (14):实验任务和要求 (14):实验步骤和结果 (14):结果分析 (18)实验四:图像的锐化处理 (19):实验目的 (19):实验任务和要求 (19):实验步骤和结果 (19):结果分析 (21)实验一:数字图像的基本处理操作:实验目的1、熟悉并掌握MATLAB、PHOTOSHOP等工具的使用;2、实现图像的读取、显示、代数运算和简单变换。
3、熟悉及掌握图像的傅里叶变换原理及性质,实现图像的傅里叶变换。
:实验任务和要求1.读入一幅RGB图像,变换为灰度图像和二值图像,并在同一个窗口内分成三个子窗口来分别显示RGB图像和灰度图像,注上文字标题。
2.对两幅不同图像执行加、减、乘、除操作,在同一个窗口内分成五个子窗口来分别显示,注上文字标题。
3.对一幅图像进行平移,显示原始图像与处理后图像,分别对其进行傅里叶变换,显示变换后结果,分析原图的傅里叶谱与平移后傅里叶频谱的对应关系。
4.对一幅图像进行旋转,显示原始图像与处理后图像,分别对其进行傅里叶变换,显示变换后结果,分析原图的傅里叶谱与旋转后傅里叶频谱的对应关系。
:实验步骤和结果1.对实验任务1的实现代码如下:a=imread('d:\');i=rgb2gray(a);I=im2bw(a,;subplot(1,3,1);imshow(a);title('原图像');subplot(1,3,2);imshow(i);title('灰度图像');subplot(1,3,3);imshow(I);title('二值图像');subplot(1,3,1);imshow(a);title('原图像');结果如图所示:图原图及其灰度图像,二值图像2.对实验任务2的实现代码如下:a=imread('d:\');A=imresize(a,[800 800]);b=imread('d:\');B=imresize(b,[800 800]);Z1=imadd(A,B);Z2=imsubtract(A,B);Z3=immultiply(A,B);Z4=imdivide(A,B);subplot(3,2,1);imshow(A);title('原图像 A'); subplot(3,2,2);imshow(B);title('原图像 B'); subplot(3,2,3);imshow(Z1);title('加法图像'); subplot(3,2,4);imshow(Z2);title('减法图像'); subplot(3,2,5);imshow(Z3);title('乘法图像'); subplot(3,2,6);imshow(Z2);title('除法图像');结果如图所示:3.对实验任务3的实现代码如下:s=imread('d:\');i=rgb2gray(s);i=double(i);j=fft2(i);k=fftshift(j); %直流分量移到频谱中心I=log(abs(k)); %对数变换m=fftshift(j); %直流分量移到频谱中心RR=real(m); %取傅里叶变换的实部II=imag(m); %取傅里叶变换的虚部A=sqrt(RR.^2+II.^2);A=(A-min(min(A)))/(max(max(A)))*255;b=circshift(s,[800 450]);b=rgb2gray(b);b=double(b);c=fft2(b);e=fftshift(c);I=log(abs(e));f=fftshift(c);WW=real(f);ZZ=imag(f);B=sqrt(WW.^2+ZZ.^2);B=(B-min(min(B)))/(max(max(B)))*255;subplot(2,2,1);imshow(s);title('原图像');subplot(2,2,2);imshow(uint8(b));title('平移图像');subplot(2,2,3);imshow(A);title('离散傅里叶变换频谱');subplot(2,2,4);imshow(B);title('平移图像离散傅里叶变换频谱');结果如图所示:4.对实验任务4的实现代码如下:s=imread('d:\');i=rgb2gray(s);i=double(i);j=fft2(i);k=fftshift(j);I=log(abs(k));m=fftshift(j);RR=real(m);II=imag(m);A=sqrt(RR.^2+II.^2);A=(A-min(min(A)))/(max(max(A)))*255;b=imrotate(s,-90);b=rgb2gray(b);b=double(b);c=fft2(b);e=fftshift(c);I=log(abs(e));f=fftshift(c);WW=real(f);ZZ=imag(f);B=sqrt(WW.^2+ZZ.^2);B=(B-min(min(B)))/(max(max(B)))*255;subplot(2,2,1);imshow(s);title('原图像');subplot(2,2,2);imshow(uint8(b));title('平移图像');subplot(2,2,3);imshow(A);title('离散傅里叶频谱');subplot(2,2,4);imshow(B);title('平移图像离散傅里叶频谱');结果如图所示::结果分析对MATLAB软件的操作开始时不太熟悉,许多语法和函数都不会使用,写出程序后,调试运行,最开始无法显示图像,检查原因,是有些标点符号没有在英文状态下输入和一些其他的细节,学会了imread(),imshow(),rgb2gray()等函数。
2.3.1 邻域平均法均值滤波邻域平均法是空间域平滑噪声技术,也是用消除噪声的最简单的方法,最简单的是将原图中一个像素的灰度值和它周围邻近8个像素的灰度值相加,然后将求得的平均值(除以9)作为新图中该像素的灰度值。
它采用模板计算的思想,模板操作实现了一种邻域运算,即某个像素点的结果不仅与本像素灰度有关,而且与其邻域点的像素值有关。
邻域平均法的用数学表达如公式2.2所示:,(i,j)∈M(2-2)g(i,j)=∑f(i,j)N其中f(i,j)为给定的含有噪声的图像, g(i,j)为经过邻域平均处理后的图像为,M是所取邻域中各邻近像素的坐标,是邻域中包含的邻近像素的个数。
邻域平均处理方法是以图像模糊为代价来减小噪声的,且模板尺寸越大,噪声减小的效果越显著。
如果是噪声点f(i,j),其邻近像素灰度与之相差很大,采用邻域平均法就是用邻近像素的平均值来代替它,这样能明显消弱噪声点,使邻域中灰度接近均匀,起到平滑灰度的作用。
在实际应用中,可根据图像处理的要求、处理区域的大小和噪声的多少选择不同寸的模板,如3x3, 5x5, 7x7. 9x9等。
邻域平滑滤波方法程序设计简单,处理速度快并且能去除大部分的噪声,但是会导致图像模糊,特别是边缘部分[14]。
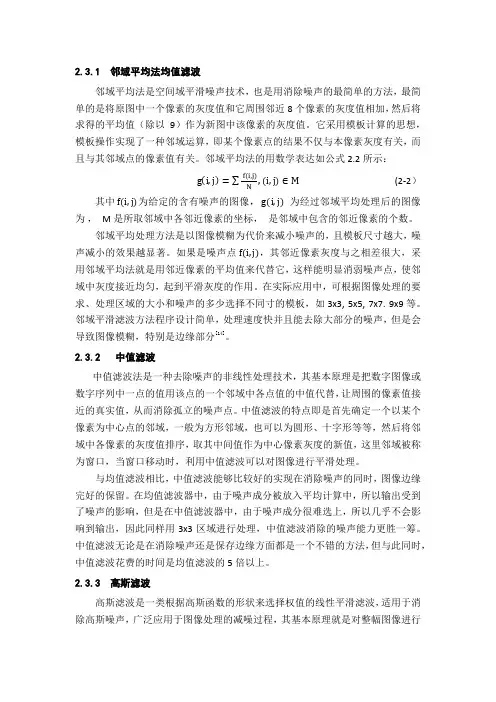
2.3.2 中值滤波中值滤波法是一种去除噪声的非线性处理技术,其基本原理是把数字图像或数字序列中一点的值用该点的一个邻域中各点值的中值代替,让周围的像素值接近的真实值,从而消除孤立的噪声点。
中值滤波的特点即是首先确定一个以某个像素为中心点的邻域,一般为方形邻域,也可以为圆形、十字形等等,然后将邻域中各像素的灰度值排序,取其中间值作为中心像素灰度的新值,这里邻域被称为窗口,当窗口移动时,利用中值滤波可以对图像进行平滑处理。
与均值滤波相比,中值滤波能够比较好的实现在消除噪声的同时,图像边缘完好的保留。
在均值滤波器中,由于噪声成分被放入平均计算中,所以输出受到了噪声的影响,但是在中值滤波器中,由于噪声成分很难选上,所以几乎不会影响到输出,因此同样用3x3区域进行处理,中值滤波消除的噪声能力更胜一筹。
实验三空域滤波一实验目的1了解空域滤波的方法。
2掌握几种模板的基本原理。
二实验条件PC微机一台和MATLAB软件。
三实验内容1使用函数fspecial( ) 生成几种特定的模板。
2使用函数imfilter( ) 配合模板对图象数据进行二维卷积。
3比较各种滤波器的效果。
四实验步骤空域滤波一般分为线性滤波和非线性滤波。
空域滤波器根据功能分为平滑滤波器和锐化滤波器。
1)平滑空间滤波:平滑的目的有两种:一是模糊,即在提取较大的目标前去除太小的细节或将目标内的小间断连接起来;另一种是消除噪声。
线性平滑(低通)滤波器:线性平滑空域滤波器的输出是包含在滤波掩膜邻域内像素的简单平均值。
线性平滑滤波器也称为均值滤波器,这种滤波器的所有系数都是正数,对3*3的模板来说,最简单的是取所有系数为1,为了保持输出图像仍然在原来图像的灰度值范围内,模板与像素邻域的乘积都要除以9。
a用h=fspecial(‘average’) 得到的h 为3×3的邻域平均模板,然后用h来对图象lenna.gif进行平滑处理。
>> x=imread('lenna.gif');h=fspecial('average');y=imfilter(x,h);imshow(x);title('原始图像');subplot(1,2,2);imshow(y);title('均值滤波后图像')实验结果如图:b 把模板大小依次改为7×7,9×9和11×11,观察其效果有什么不同?>>x=imread('lenna.gif');subplot(1,4,1);imshow(x);title('原始图像');h=fspecial('average',7);y=imfilter(x,h);subplot(1,4,2);imshow(y);title('模板大小7*7的图像');h1=fspecial('average',9);y1=imfilter(x,h1);subplot(1,4,3);imshow(y1);title('模板大小9*9的图像');h2=fspecial('average',11);y2=imfilter(x,h2);subplot(1,4,4);title('模板大小11*11的图像')比较效果:造成图像的模糊,n选取的越大,模糊越严重。
图像的平滑——邻域平均法和中值滤波一、 邻域平均法将原图中的一个像素的灰度值和它周围邻近8个像素即一个3*3的模板(当然也可以选择其他n*n 的模板)的灰度值相加,然后将求得的平均值作为新图像中该像素的灰度值。
可用如右图方法来表示该操作: 首先,这样操作会存在一个边界的问题: 设原图像为 经过模板操作后的图像为解决这个问题可以采用两种简单方法:一种方法是忽略图像边界数据, 另一种方法是在图像四周复制原图像边界像素的值,从而使卷积核悬挂在图像四周时可以进行正常的计算。
实际应用中,多采用第一种方法。
其次,是计算出来的像素值的动态范围问题, 对此可简单地将其值置为0或255即可。
设有一幅N ×N 的图像f(x,y),若平滑图像为g(x,y),则有式中x,y=0,1,…,N-1; s 为(x,y )邻域内像素坐标的集合; M 表示集合s 内像素的总数。
可见邻域平均法就是将当前像素邻域内各像素的灰度平均值作为其输出值的去噪方法。
例如,对图像采用3×3的邻域平均法,对于像素 (m,n),其邻域像素如下:则有:这种算法简单,但它的主要缺点是在降低噪声的同时使图像产生模糊,特别在边缘和细节处。
而且邻域越大,在去噪能力增强的同时模糊程度越严重。
邻域平均法代码分析(3*3): void CKuangjiaView::OnAverage() { BYTE*p,*q; int w,h; int i,j,temp;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡1111*1111191⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡44444333332222211111⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡--------------333222w=pDib->GetWidth();//获取宽度h=pDib->GetHeight();//获取高度p=pDib->GetData();q=new BYTE[w*h];//创建一个新的数组用来计算memcpy(q,p,w*h);//将图像信息拷贝到新数组中for(i=1;i<h-1;i++)for(j=1;j<w-1;j++)//忽略上下左右边界{temp=(q[(i-1)*w+(j-1)]+q[(i-1)*w+j]+q[(i-1)*w+(j+1)]+q[i*w+(j-1)]+q[i*w+j+1]+q[(i+1)*w+(j-1)]+q[(i+1)*w+j]+q[(i+1)*w+j+1])/8;//以(i,j)为中心的3*3个像素点*(p+i*w+j)=temp;//(i,j)新的像素大小}delete[] q;Invalidate();}二、中值滤波中值滤波是对一个滑动窗口内的诸像素灰度值排序,用中值代替窗口中心像素的原来灰度值,因此它是一种非线性的图像平滑法。
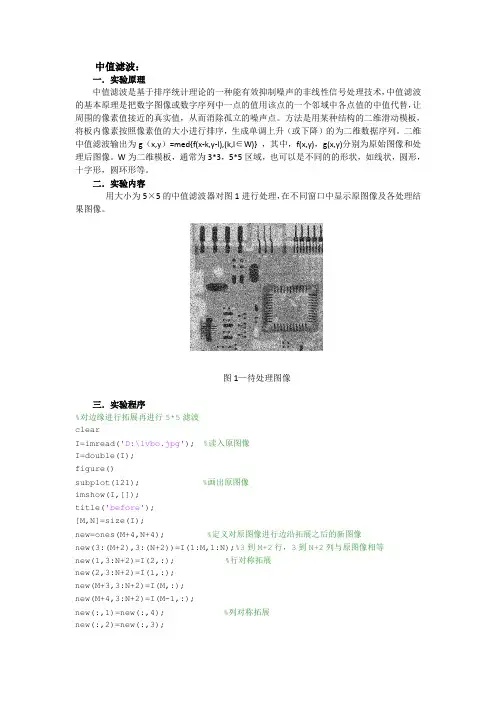
中值滤波:一.实验原理中值滤波是基于排序统计理论的一种能有效抑制噪声的非线性信号处理技术,中值滤波的基本原理是把数字图像或数字序列中一点的值用该点的一个邻域中各点值的中值代替,让周围的像素值接近的真实值,从而消除孤立的噪声点。
方法是用某种结构的二维滑动模板,将板内像素按照像素值的大小进行排序,生成单调上升(或下降)的为二维数据序列。
二维中值滤波输出为g(x,y)=med{f(x-k,y-l),(k,l∈W)} ,其中,f(x,y),g(x,y)分别为原始图像和处理后图像。
W为二维模板,通常为3*3,5*5区域,也可以是不同的的形状,如线状,圆形,十字形,圆环形等。
二.实验内容用大小为5×5的中值滤波器对图1进行处理,在不同窗口中显示原图像及各处理结果图像。
图1—待处理图像三.实验程序%对边缘进行拓展再进行5*5滤波clearI=imread('D:\lvbo.jpg'); %读入原图像I=double(I);figure()subplot(121); %画出原图像imshow(I,[]);title('before');[M,N]=size(I);new=ones(M+4,N+4); %定义对原图像进行边沿拓展之后的新图像new(3:(M+2),3:(N+2))=I(1:M,1:N);%3到M+2行,3到N+2列与原图像相等new(1,3:N+2)=I(2,:); %行对称拓展new(2,3:N+2)=I(1,:);new(M+3,3:N+2)=I(M,:);new(M+4,3:N+2)=I(M-1,:);new(:,1)=new(:,4); %列对称拓展new(:,2)=new(:,3);new(:,N+3)=new(:,N+2);new(:,N+4)=new(:,N+1);for i=1:M; %1到M 行,1到N 列用5*5模板循环计算中值并赋值给中间数 for j=1:N; %即进行中值滤波A=new(i:i+4,j:j+4);A=A(:);B=sort(A,'ascend');C=median(B);new(i+2,j+2)=C;end ;end ;D=new(3:M+2,3:N+2);subplot(122);imshow(D,[]);title('after'); %显示均值滤波后的图像四.结果分析经过中值滤波前后图像如图2所示,由图可以看出,中值滤波后,去除了椒盐噪声,且处理之后的图像相比较于均值滤波处理之后的图像清晰,所以中值滤波效果优于均值滤波。
一、试验内容:1.熟悉程序基本框架;2.读取位图,转换为灰度图;3.完成灰度图像的平滑和锐化处理。
二、试验方法:1. 图像平滑(1)邻域平均法算法思想:邻域平均法是用像素及其指定邻域内像素的平均值或加权平均值作为该像素的新值,以便除去突变的像素点,从而滤除一定的噪声。
本试验采用3*3高斯模板对图像进行处理,主要程序如下:void CWvltDoc::Onsmo(){// TODO: Add your command handler code hereLPBITMAPINFOHEADER lpBitmapInfoHeader = (LPBITMAPINFOHEADER)(m_pBitmap+14);//信息头LPBITMAPFILEHEADER lpBitmapFileHeader = (LPBITMAPFILEHEADER)m_pBitmap;//文件头unsigned char *lpData = m_pBitmap + lpBitmapFileHeader->bfOffBits;//指向实际位图信息数据unsigned long biHeight = lpBitmapInfoHeader->biHeight;unsigned long biWidth = lpBitmapInfoHeader->biWidth;unsigned long biAlign = ( biWidth*3+3) /4 *4;//实际宽度unsigned long bmSize = biHeight * biAlign;if (m_pTransfered == NULL)m_pTransfered = (unsigned char*)malloc(bmSize);if (m_pTransfered2 == NULL)m_pTransfered2 = (unsigned char*)malloc(bmSize);if (m_pTransfered2 == NULL)return ;int tem_height,tem_width,tem[3][3]={1,2,1,2,4,2,1,2,1};double tem_xishu;tem_height=3;tem_width=3;tem_xishu=16;int x, y, cur;for (y = 0; y < (int)biHeight; y++){for (x = 0; x < (int)biWidth; x++){cur = y*biAlign+3*x; //current pixel当前像素位置m_pTransfered[cur]=(lpData[cur]+lpData[cur+1]+lpData[cur+2])/3;m_pTransfered[cur+1]=m_pTransfered[cur];m_pTransfered[cur+2]=m_pTransfered[cur];}}for (int j = 0; j < (int)biHeight; j++){for (int i = 0; i < (int)biWidth; i++){cur = j*biAlign+3*i;m_pTransfered2[cur]=(m_pTransfered[cur-biAlign-3]*tem[0][0]+m_pTransfered[cur-3]*tem [0][1]+m_pTransfered[cur-3+biAlign]*tem[0][2]+m_pTransfered[cur-biAlign]*tem[1][0]+m_pTr ansfered[cur]*tem[1][1]+m_pTransfered[cur+biAlign]*tem[1][2]+m_pTransfered[cur-biAlign+3] *tem[2][0]+m_pTransfered[cur+3]*tem[2][1]+m_pTransfered[cur+3+biAlign]*tem[2][2])/tem_xi shu;m_pTransfered2[cur+1]= m_pTransfered2[cur];m_pTransfered2[cur+2]= m_pTransfered2[cur];}}UpdateAllViews(NULL);}(2)中值滤波法算法思想:把以某像素为中心的小窗口内的所有像素的灰度按从小到大排序,取排序结果的中间值作为该像素的灰度值。
图像处理中的图像滤波算法使用教程图像滤波是数码图像处理中常用的技术之一,它能够改善图像质量、去除噪声、增强图像细节等。
在图像处理领域中,有多种不同类型的滤波算法可供选择,包括线性和非线性滤波算法。
本文将介绍图像处理中常见的几种滤波算法及其使用方法,以帮助读者更好地理解和应用这些算法。
一、线性滤波算法1. 均值滤波均值滤波是一种常见且简单的线性滤波算法。
它通过取周围像素的平均值来平滑图像,从而减小图像中的高频噪声。
均值滤波的具体步骤如下:(1)定义一个滑动窗口,大小为n×n。
n的取值通常为3、5或7,根据实际需求选择。
(2)选取窗口中所有像素的平均值,并将其赋给窗口中心像素。
(3)依次遍历图像中的每个像素,重复步骤(2)直到遍历完所有像素。
均值滤波适用于去除轻度噪声和平滑图像,但会导致图像细节损失。
2. 高斯滤波高斯滤波是一种基于高斯函数的线性滤波算法,也是最常用的模糊滤波算法之一。
它通过对图像进行加权平均来平滑图像,具有较好的平滑效果并且不会丢失图像细节。
高斯滤波的过程如下:(1)定义一个滑动窗口,大小为n×n。
(2)根据高斯函数的权重计算滑动窗口中每个像素的权重。
(3)将权重乘以对应像素的灰度值,并将结果累加。
(4)将累加值除以所有权重的总和,得到滑动窗口中心像素的灰度值。
高斯滤波是一种较为通用的线性滤波算法,适用于去除噪声、模糊图像和提高图像质量。
3. 中值滤波中值滤波是一种非线性滤波算法,它通过用滑动窗口中所有像素的中值来替代中心像素的值。
中值滤波的步骤如下:(1)定义一个滑动窗口,大小为n×n。
(2)将滑动窗口中的所有像素按照像素值大小排序。
(3)取排序结果的中值,并将其赋给滑动窗口中心像素。
中值滤波能够有效地去除椒盐噪声和脉冲噪声,但会导致图像细节模糊。
二、非线性滤波算法1. 双边滤波双边滤波是一种基于空间和灰度相似性的非线性滤波算法。
它能够在保持边缘清晰的同时平滑图像,对于去噪和保护图像细节来说都很有效。
数字图像处理 实验三
邻域平均法(box 模板)和中值滤波处理
加入脉冲噪声后的图像:testnoise.bmp 去噪过程 结果图像
请设计程序,分别用邻域平均法,其模板为:
和中值滤波法对testnoise 图像进行去噪处理(中值滤波的模板的大小也设为3×3)。
得出实验结果图像后,比较这两种方法去噪的效果好坏,并分析具体原因。
完成上述工作后,使用程序进行验证分析:使用邻域平均法时,3×3和5×5模板大小对图像进行处理的效果有何差别?并分析原因。
附加说明:程序框架可以参考第二次实验指导书上给出的示例程序。
邻域平均法 中值滤波法
⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎣⎡1111*1111191。
数字图像处理实验实验总学时:10学时实验目的:本实验的目的是通过实验进一步理解和掌握数字图像处理原理和方法。
通过分析、实现现有的图像处理算法,学习和掌握常用的图像处理技术。
实验内容:数字图像处理的实验内容主要有三个方面:(1) 对图像灰度作某种变换,增强其中的有用信息,抑制无用信息,使图像的视在质量提高,以便于人眼观察、理解或用计算机对其作进一步的处理。
(2) 用某种特殊手段提取、描述和分析图像中所包含的某些特征和特殊的信息,主要的目的是便于计算机对图像作进一步的分析和理解,经常作为模式识别和计算机视觉的预处理。
这些特征包括很多方面,例如,图像的频域特性、灰度特征、边界特征等。
(3) 图像的变换,以便于图像的频域处理。
实验一图像的点处理实验内容及实验原理:1、灰度的线性变换灰度的线性变换就是将图像中所有的点的灰度按照线性灰度变换函数进行变换。
该线性灰度变换函数是一个一维线性函数:灰度变换方程为:其中参数为线性函数的斜率,函数的在y轴的截距,表示输入图像的灰度,表示输出图像的灰度。
要求:输入一幅图像,根据输入的斜率和截距进行线性变换,并显示。
2、灰度拉伸灰度拉伸和灰度线性变换相似。
不同之处在于它是分段线性变换。
表达如下:其中,(x1,y1)和(x2,y2)是分段函数的转折点。
要求:输入一幅图像,根据选择的转折点,进行灰度拉伸,显示变换后的图像。
3、灰度直方图灰度直方图是灰度值的函数,描述的是图像中具有该灰度值的像素的个数,其横坐标表示像素的灰度级别,纵坐标表示该灰度出现的频率(象素的个数)。
要求:输入一幅图像,显示它的灰度直方图,可以根据输入的参数(上限、下限)显示特定范围的灰度直方图。
4、直方图均衡:要求1 显示一幅图像pout.bmp的直方图;2 用直方图均衡对图像pout.bmp进行增强;3 显示增强后的图像。
实验二:数字图像的平滑实验内容及实验原理:1.用均值滤波器(即邻域平均法)去除图像中的噪声;2.用中值滤波器去除图像中的噪声3. 比较两种方法的处理结果 实验步骤:用原始图象lena.bmp 或cameraman.bmp 加产生的3%椒盐噪声图象合成一幅有噪声的图象并显示;1. 用均值滤波器去除图像中的噪声(选3x3窗口);2. f (x 0,y 0)=Med {f (x,y )∨x ∈[x 0−N,x 0+N ],y ∈[y 0−N,y 0+N ]}用中值滤波器去除图像中的噪声(选3x3窗口做中值滤波);3. 将两种处理方法的结果与原图比较,注意两种处理方法对边缘的影响。
实验数字图像的空间域滤波
一、实验目的
1、理解图像空间域滤波的原理;
2、掌握图像均值滤波、中值滤波的原理与实现方法;
3、掌握上述方法的改进方法。
二、实验原理
均值滤波的主要步骤为:
(1)将模板在途中漫游,并将模板中心与途中某个象素位置重合;(2)将模板上系数与模板下对应象素相乘;
(3)将所有乘积相加;
(4)将和(模板的输出响应)赋给途中对应模板中心位置的象素。
中值滤波的主要步骤为:
(1)将模板在途中漫游,并将模板中心与途中某个象素位置重合;(2)读取模板下各对应象素的灰度值;
(3)将这些灰度值从小到大排成1列;
(4)找出这些值里排在中间的1个;
(5)将这个中间值赋给对应模板中心位置的象素。
三、实验内容
基本要求:
1、自己编程实现图像的均值滤波;
2、自己编程实现图像的中值滤波;
3、利用matlab图像处理工具箱中的函数实现图像的上述处理;
扩展要求:
4、实现一种图像加权中值滤波或加权均值滤波;
四、实验步骤
1、编程实现图像的均值滤波
程序代码:
运行程序得到如下结果:
2、编程实现图像的中值滤波
程序代码:
运行程序后得到如下结果:
3、实现一种图像加权中值滤波或加权均值滤波设计x模板为:
运行程序可得均值滤波后的结果:
运行程序可得中值滤波后的结果:
五、实验结果分析
从实验结果可以看出,中值滤波较均值滤波效果好些,并且滤波与所选的模板有关,若选择权值相同(本实验为0.1/9)相对不同权值的效果好些。
模板的不同对均值滤波的影响较大。
数字图像处理实验1. 直方图修正灰度变换是图像增强的一种重要手段,使图像对比度扩展,图像更加清晰,特征更加明显。
灰度级的直方图给出了一幅图像概貌的描述,通过修改灰度直方图来得到图像增强。
(1)计算出一幅灰度图像的直方图clearclose allI=imread(' rice.png');imhist(I)title('实验一(1)直方图');(2)对灰度图像进行简单的灰度线形变换,figuresubplot(2,2,1)imshow(I);title('试验2-灰度线性变换');subplot(2,2,2)histeq(I);(3)看其直方图的对应变化和图像对比度的变化原图像f(m,n) 的灰度范围[a,b] 线形变换为图像g(m,n),灰度范围[a’,b’] 公式:g(m,n)=a’+(b’-a’)* f(m,n) /(b-a)figuresubplot(2,2,1)imshow(I)J=imadjust(I,[0.3,0.7],[0,1],1);title(' 实验一(3)用g(m,n)=a’+(b’-a’)* f(m,n)/(b-a)进行变换');subplot(2,2,2)imshow(J)subplot(2,2,3)imshow(I)J=imadjust(I,[0.5 0.8],[0,1],1);subplot(2,2,4)imshow(J)(4) 图像二值化(选取一个域值,将图像变为黑白图像)figuresubplot(2,2,1)imshow(I)J=find(I<150);I(J)=0;J=find(I>=150);I(J)=255;title(' 实验一(4)图像二值化( 域值为150 )');subplot(2,2,2)imshow(I)clc;I=imread(‘rice.png');bw=im2bw(I,0.5);%选取阈值为0.5figure;imshow(bw) %显示二值图像2. 图像处理变换1.傅立叶变换熟悉其概念和原理,实现对一幅灰度图像的快速傅立叶变换,并求其变换后的系数分布. 2.离散余弦变换熟悉其概念和原理,实现对一幅灰度和彩色图像作的离散余弦变换,选择适当的DCT系数阈值对其进行DCT反变换.% 图像的FFT变换clc;I=imread('rice.png');subplot(1,2,1)imshow(I);title('原图');subplot(1,2,2)imhist(I);title('直方图');colorbar;J=fft2(I);figure;subplot(1,2,1)imshow(J);title('FFT变换结果');subplot(1,2,2)K=fftshift(J);imshow(K);title('零点平移');figure;imshow(log(abs(K)),[]),colormap(jet(64)),colorbar;title('系数分布图');% 图像的DCT变换RGB=imread('onion.png');figure;subplot(1,2,1)imshow(RGB);title('彩色原图');a=rgb2gray(RGB);subplot(1,2,2)imshow(a);title('灰度图');figure;b=dct2(a);imshow(log(abs(b)),[]),colormap(jet(64)),colorbar; title('DCT变换结果');figure;b(abs(b)<10)=0;% idctc=idct2(b)/255;imshow(c);title('IDCT变换结果');3. 小波变换实验内容:熟悉小波变换的概念和原理,熟悉matlab小波工具箱主要函数的使用.利用二维小波分析对一幅图像作2层小波分解,并在此基础上提取各层的低频信息实现图像的压缩.程序如下:clcclose allcleara=imread('deblur1.png ');subplot(1,2,1);imshow(a);title('原始图像');I=rgb2gray(a);subplot(1,2,2);imshow(I);title('原始图像的灰度图');% 进行二维小波变换[a,b] = wavedec2(I, 2, 'bior3.7');% 提取各层低频信息figure;c = appcoef2( a, b, 'bior3.7', 1 );subplot(1,2,1);imshow(c, []);title('一层小波变换结果');d = appcoef2( a, b, 'bior3.7', 2 );subplot(1,2,2);imshow(d, []);title('二层小波变换结果');4. 模板运算一、实验内容:(1)平滑:平滑的目的是模糊和消除噪声。
数字图像处理实验报告实验三邻域平均法滤波学号姓名实验三 邻域平均法滤波一、实验内容选取噪声较明显的图像,分别采用3*3、5*5、7*7的模板进行邻域平均法滤波,并比较滤波效果。
二、实验步骤1、 设计思想或者流程图。
邻域平均法的思想是用像素及其指定邻域内像素的平均值或加权平均值作为该像素的新值,以便去除突变的像素点,从而滤除一定的噪声。
邻域平均法的数学含义可用下式表示:∑∑==⎪⎭⎫ ⎝⎛=mn i imn i i i w z w y x g 11),( (1)上式中:i z 是以),(y x 为中心的邻域像素值;i w 是对每个邻域像素的加权系数或模板系数;mn 是加权系数的个数或称为模板大小。
邻域平均法中常用的模板是: ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡*=11111111191Box T (2)为了解决邻域平均法造成的图像模糊问题,采用阈值法(又叫做超限邻域平均法,如果某个像素的灰度值大于其邻域像素的平均值,且达到一定水平,则判断该像素为噪声,继而用邻域像素的均值取代这一像素值;否则,认为该像素不是噪声点,不予取代),给定阈值0T :⎩⎨⎧≥-<-=00),(),(),(),(),(),(),(T y x g y x f y x g T y x g y x f y x f y x h (3)(3)式中,),(y x f 是原始含噪声图像,),(y x g 是由(1)式计算的平均值,),(y x h 滤波后的像素值。
2、 源程序并附上注释。
3、A=imread('1.jpg');B=rgb2gray(A);figure; imshow(B); title('原始图象');H=imnoise(B,'gaussian');figure; imshow(H); title('高斯噪声');Q=imnoise(B,'salt & pepper');figure; imshow(Q); title('椒盐噪声');M=fspecial('average',3*3);E=imfilter(Q,M);figure; imshow(E); title('3*3平均模板'); N=fspecial('average',5*5);K=imfilter(Q,N);figure; imshow(K); title('5*5平均模板'); Z=fspecial('average',7*7);J=imfilter(Q,Z);figure; imshow(J); title('7*7平均模板');4、程序运行结果比较。
数字图像处理 实验三
邻域平均法(box 模板)和中值滤波处理
加入脉冲噪声后的图像:testnoise.bmp 去噪过程 结果图像
请设计程序,分别用邻域平均法,其模板为:
和中值滤波法对testnoise 图像进行去噪处理(中值滤波的模板的大小也设为3×3)。
得出实验结果图像后,比较这两种方法去噪的效果好坏,并分析具体原因。
完成上述工作后,使用程序进行验证分析:使用邻域平均法时,3×3和5×5模板大小对图像进行处理的效果有何差别?并分析原因。
附加说明:程序框架可以参考第二次实验指导书上给出的示例程序。
邻域平均法 中值滤波法
⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎣⎡1111*1111191。