计算机模糊控制算法
- 格式:pdf
- 大小:330.40 KB
- 文档页数:5
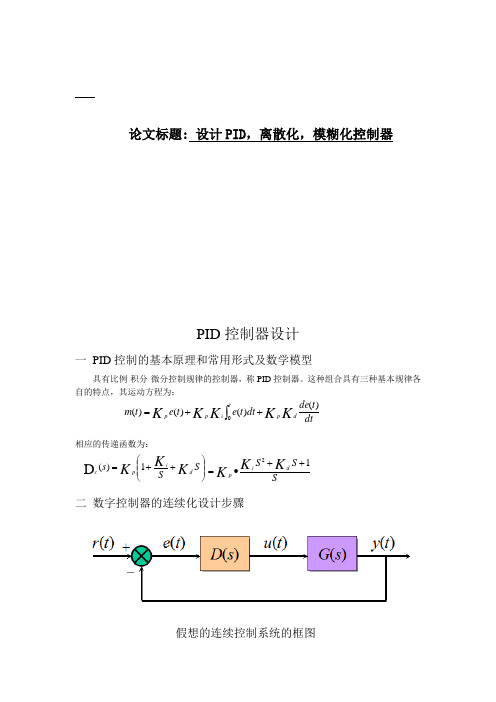
论文标题: 设计PID ,离散化,模糊化控制器PID 控制器设计一 PID 控制的基本原理和常用形式及数学模型具有比例-积分-微分控制规律的控制器,称PID 控制器。
这种组合具有三种基本规律各自的特点,其运动方程为:dt t de dt t e t e t m K K K K K dp ti p p )()()()(0++=⎰相应的传递函数为:⎪⎪⎭⎫ ⎝⎛++=S S s K K K d i p c 1)(D S S S K K K d ip 12++∙=二 数字控制器的连续化设计步骤假想的连续控制系统的框图1 设计假想的连续控制器D(s)由于人们对连续系统的设计方法比较熟悉,对由上图的假想连续控制系统进行设计,如利用连续系统的频率的特性法,根轨迹法等设计出假想的连续控制器D(S)。
2 选择采样周期T香农采样定理给出了从采样信号到恢复连续信号的最低采样频率。
在计算机控制系统中,完成信号恢复功能一般有零阶保持器H(s)来实现。
零阶保持器的传递函数为3将D(S)离散化为D(Z)将连续控制器D(S)离散化为数字控制器D(Z)的方法很多,如双线性变换法,后向差分法,前向差分法,冲击响应不变法,零极点匹配法,零阶保持法。
双线性变换法然后D(S)就可以转化离散的D(Z)三Matlab仿真实验直接试探法求PID根据这个框图,求出该传递函数的P=0.35 I=0 D=0根据⎪⎪⎭⎫ ⎝⎛++=S S s K K K d i p c 1)(D D (Z )=0.35 T=0.01数字连续话PID 控制器设计MA TLAB 仿真框图实验结果 没有经过调节的结果为结果分析一阶阶跃信号的幅值选择为5经过数字连续化PID控制器后,对比图形发现,结果变得非常稳定,没有发现超调量,而没有经过PID控制的图形发生了超调变化达到稳定的时间变得更长。
二离散化控制器的设计离散系统设计是指在给定系统性能指标的条件下,设计出控制器的控制规律和相应的数字控制算法。

§6 模糊控制原理简介§6.1 模糊控制系统现代控制理论已经在工业、国防、航天等许多领域获得了成功。
一般情况下,传统的闭环控制系统如图6.1所示,其原理是建立在精确的数学模型上。
但对于一些强藕合、多参数、非线性、时变性、大惯性、纯滞后的复杂系统,建立它们的精确数学模型是很困难的,有些甚至是不可能的。
然而,在实际工作当中,一些有经验的操作人员却可以通过观察、推理和决策,用人工控制的方法较好地控制那些复杂的对象。
模糊控制系统就是将人的经验总结成语言控制规则,运用模糊理论模拟人的推理与决策,从而实现自动控制的控制系统。
模糊控制系统与传统的闭环控制系统不同之处,就是用模糊控制器代替了模拟式控制器,其硬件结构框图如图6.2所示.y(t)输出y(t)图6.1 图6.2输出图6.3§6。
2 模糊控制器的设计模糊控制器本质上就是一个采用了模糊控制算法的计算机或芯片,其一般结构如图6。
3所示。
它由三个基本部分构成:(1)将输入的确切值“模糊化”,成为可用模糊集合描述的变量;(2)应用语言规则进行模糊推理;(3)对推理结果进行决策并反模糊化(也称为清晰化、解模糊),使之转化为确切的控制量。
有m个输入一个输出的模糊控制器称为m维模糊控制器。
由于一维模糊控制器所能获得的系统动态性能往往不能令人满意,三维及三维以上的模糊控制器结构复杂,推理运算时间长,因此典型的模糊控制器是二维模糊控制器。
一般地,设计一个二维的模糊控制器,通常需要五个步骤:1. 确定输入变量与输出变量及其模糊状态;2. 输入变量的模糊化;3. 建立模糊控制规则;4. 进行模糊推理;5. 输出变量的反模糊化。
6.2.1 确定输入变量与输出变量及其模糊状态根据问题的背景,确定出输入变量E 1、E 2和输出变量u .输入、输出变量的模糊状态按照控制品质的要求可分为三类:控制品质要求较高的场合,变量的模糊状态取为负大(NB )、负中(NM)、负小(NS )、零(ZO)、正小(PS )、正中(PM )、正大(PB )或负大(NB )、负中(NM )、负小(NS)、负零(NZ)、正零(PZ )、正小(PS)、正中(PM)、正大(PB );控制品质要求一般的场合,变量的模糊状态取为负大(NB )、负小(NS )、零(ZO )、正小(PS)、正大(PB )或负大(NB )、负小(NS )、负零(NZ)、正零(PZ)、正小(PS )、正大(PB );控制品质要求较低的场合,变量的模糊状态取为负大(NB )、零(ZO )、正大(PB )或负大(NB )、负零(NZ)、正零(PZ)、正大(PB )。

第2章模糊控制2.1 模糊控制自从1965年美国加利福尼亚大学控制论专家L .A .zadeh教授提出模糊数学以来”,吸引了众多的学者对其进行研究,使其理论与方法日臻完善,并且广泛地应用于自然科学和社会科学的各个领域,尤其是在第5代计算机研制和知识工程开发等领域占有特殊重要的地位。
把模糊逻辑应用于控制领域则始于1973年”。
1974年英国的E.H.Mamdani成功地将模糊控制应用于锅炉和蒸汽机控制。
此后20多年来,模糊控制不断发展并在许多领域中得到成功应用。
由于模糊逻辑本身提供了由专家构造语言信息并将其转化为控制策略的一种系统的推理方法,因而能够解决许多复杂而无法建立精确数学模型系统的控制问题,所以它是处理推理系统和控制系统中不精确和不确定性的一种有效方法。
从广义上讲,模糊控制是适于模糊推理,模仿人的思维方式,对难以建立精确数学模型的对象实施的一种控制策略。
它是模糊数学同控制理论相结合的产物,同时也是智能控制的重要组成部分。
模糊控制的突出特点在于:①控制系统的设计不要求知道被控对象的精确数学模型,只需要提供现场操作人员的经验知识及操作数据。
⑦控制系统的鲁棒性强,适应于解决常规控制难以解决的非线性、时变及大纯滞后等问题。
③以语言变量代替常规的数学变量,易于形成专家的“知识”。
④控制推理采用“不精确推理”(Approximatc Reasoning)。
推理过程模仿人的思维过程。
由于介入了人类的经验.因而能够处理复杂甚至“病态”系统。
2.1.1模糊数学模糊数学是基于模糊集理论。
模糊集的概念与古典集非此即彼的概念相对应,描述没有明确、清楚地定义界限的集合。
模糊集的理论叙述为:模糊集A是定义在一个输入ξ之上并由其隶属函数µA(·):ξ→[0,1]表征的集合。
假设ξ是一个普通集合,称为论域。
从ξ到区间[0,1]的映射A称为ξ上的一个模糊集合。
µA(·)表示ξ隶属于模糊集合A的程度,称为隶属度。


智能控制系统中的算法比较研究自从人工智能技术开始在各行各业得到应用以来,智能控制系统也变得越来越普遍。
在智能控制系统中,算法是关键的一环。
各种算法在不同的应用场景下都有不同的效果,这就使得研究算法之间的比较显得尤为重要。
本文将着重介绍智能控制系统中常用的算法,并对它们进行比较研究。
控制系统是由一系列相互关联的元件组成的系统,能够对被控对象进行测量、判断和操作。
而智能控制系统是在传统控制系统的基础上,加入了各种机器学习、深度学习的技术,以提高控制系统的效率和精度。
下面我们来介绍几种在智能控制系统中常用的算法。
1.模糊控制算法模糊控制算法是一种基于人类语言和知识的一类控制方法,它是在黑箱控制理论和经典控制理论的基础上发展起来的。
其主要思想是从人类专家的角度出发,把控制问题的判断和操作过程用人类语言进行表达。
在有了模糊语言的表达后,就能够转化为计算机能够识别的模糊逻辑和模糊控制规则,这样就可以完成对过程的精确控制。
尽管模糊控制算法有其优点,比如处理非线性系统时的效果明显好于传统的线性控制算法,但是其主要的缺点是必须要根据人类专家的经验来设计控制规则,这就使得其应用面缩小了很多。
2.遗传算法遗传算法是一种全局搜索的优化方法,它采用模拟自然选择和基因突变机制,来进行求解问题的最优解。
在简单的用途场景中,遗传算法可以取得比较好的效果,尤其是在多元优化问题中更能表现出它的优势。
但是,遗传算法的缺点也比较明显,一方面是由于其全局搜索机制,会受到局部最优解和可行解的限制,搜索过程会比较费时,不能保证获得最优解。
另一方面,由于遗传算法是一种启发式搜索,因此其计算变量较多、难以调试,并且经常需要进行繁琐的参数调整。
3.神经网络算法神经网络算法是一种基于模仿人脑神经元运行方式的智能算法。
其主要的特点就是对非线性问题的处理效果比先进的控制算法要好得多。
由于神经网络能够胜任非常复杂的系统,因此在智能控制系统中被广泛应用。
神经网络算法的一个主要缺点就是由于网络结构和权值的选择不确定性比较大,因此,需要大量的数据进行训练。
人工智能的模糊推理和模糊控制方法人工智能(Artificial Intelligence, AI)是研究、开发用于模拟、扩展和扩展人类智能的理论、方法、技术及其应用系统的一门科学。
在人工智能领域,模糊推理和模糊控制是两个重要的方法,它们通过引入模糊集合和模糊逻辑,使计算机能够处理和推理不确定、模糊的信息,具有广泛的应用范围和潜力。
本文将对模糊推理和模糊控制的基本原理、应用领域以及发展趋势进行详细介绍。
首先,我们先来了解一下模糊推理和模糊控制的基本原理。
模糊推理是基于模糊集合和模糊逻辑的推理方法,它的核心思想是将不确定的信息和模糊的知识进行建模,通过适当的规则进行推理,从而得到模糊的结论。
模糊推理的核心步骤包括模糊化、规则匹配、推理和去模糊化。
具体来说,模糊化将现实世界中的事物或概念映射到模糊集合上,通过模糊集合来描述不确定性和模糊性;规则匹配将输入模糊集合与预定的规则集合进行匹配,确定需要使用的规则;推理根据已匹配的规则进行逻辑推理,得到模糊的结论;去模糊化将模糊的结论映射回到现实世界的具体数值上,得到人类可以理解的结果。
模糊控制是一种基于模糊逻辑的控制方法,它通过将模糊集合和模糊推理应用于控制系统中,使控制系统能够处理模糊的输入和输出信号,从而实现对复杂系统的智能控制。
模糊控制的基本原理是将不确定的输入信号经过模糊化处理得到模糊的输入变量,然后通过一系列的模糊规则进行推理和逻辑运算,得到模糊的输出变量,最后将模糊的输出变量经过去模糊化处理得到具体的控制信号,用于调节系统的行为。
模糊控制系统的结构由模糊化模块、推理机制和去模糊化模块组成,其中模糊化模块用于将输入信号映射到模糊集合上,推理机制用于根据预定的模糊规则进行推理,去模糊化模块用于将模糊的输出信号映射回到具体的控制信号上。
模糊推理和模糊控制方法在各个领域都有广泛的应用。
在工业自动化领域,模糊控制方法可以用于汽车、航空、电力、化工等复杂系统的控制,能够有效地处理系统的非线性、模糊和不确定性问题,提高系统的稳定性和鲁棒性。
用 PLC 实现模糊控制的程序设计方法摘要:采用 PLC 进行模糊控制操作的程序设计的方法,是我们在应用 PLC 实现一些复杂控制系统时发现的,以前我们经常使用的小型 PLC 由于其不具备现代控制算法植入功能而逐渐被淘汰,文中所述程序设计方法通过实际项目的检验发现可以有效地对系统进行控制,有效缩短控制系统开发周期,其优越性能正在逐步强大起来。
关键词:PLC;模糊控制PLC 即可编程控制器,是为了进行相关数据的计算而发明的一种适用于规模化工业生产条件下使用的设备,通过一定的程序和要求,进行数据的输入和结果的输出,以此来控制工业生产过程。
模糊控制就是将其建立在人类思考问题的方式上形成的一种控制方法,它反映着人类的思维在处理事情上展现出来的一种模糊化的思考,比如对于复杂看似难以解决的问题,人们往往会根据自己的经验对事物进行思考,当我们对被控系统在一定程度上有所认识的前提下,并为解决它需要实现的控制功能而进行适当的思考,这时我们便将其称之为思维的模糊性。
模糊控制就是模仿的人类面对这种状况下的思维,我们只需给予它一定的模糊的指令程序,让其对整个的控制过程进行计算运行,这种看似简单的指令却需要有专业的人士发出以便得到相对更准确的结果。
这种对于控制的模糊性和我们以往进行的自动化的控制有着完全不同的本质,而这种模仿人类思维的控制恰恰体现了它智能化的一面,更适合当今生产对于控制的要求。
一、控制算法面对现今工业生产的复杂性,简单的线性数学模型已经不能满足生产的要求,取而代之的是要建立一个可适应不停变化的、非简单性的控制系统,而这种模型的建立纯在较大的难度。
在过去生产简单产品,不需要过多操作流程的条件下,简单传统的控制就可以实现生产的要求,现在只有找到一种先进的控制模式才能让复杂的生产流程顺利进行,用 PLC 进行模糊控制便是解决这一问题的有效办法。
传统的控制需要基于一定的模型才能准确运行,而模糊控制则完全不需要,正是这一点才让它适应于复杂的条件。