实验8_步进电机实验
- 格式:doc
- 大小:261.50 KB
- 文档页数:3
实验八步进电机控制一、实验目的a)了解步进电机控制的基本原理,掌握步进电机转动编程方法。
b) 熟悉51系列单片机得工作原理及调试方法c)设计基于51系列单片机控制的步进电机调速的原理图d)实现51系列单片机对步进电机的速度控制,实现步进电机的启动与停止:实现加速,匀速,和减速控制。
二、实验仪器计算机、单片机实验箱、MCS51仿真开发系统、杜邦线若干三、实验基本原理步进电机驱动原理是通过对它每相线圈中的电流的顺序切换来使电机作步进式旋转,驱动电路由脉冲信号来控制,所以调节脉冲信号的频率便可改变步进电机的转速,微电脑控制步进电机最适合。
步进电机区别于其他控制电机的最大特点是,他是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲总数决定,而电机的转速由脉冲信号频率决定。
(程序框图)(实验电路)四、实验内容及步骤1.内容:a)步进电机插头接80958B实验系统J1插座,b)P1.O-P1.3接HA-HD也可把L1-L4接A B C D 孔。
c)执行程序,从键盘上输入数字使显示器显示,第一位为0(正转),为1(反转),第二位0-F显示转速,第3-6位为设定步数d)按EXEC键后,使步进电机开始转动,步数逐渐减小到零时步进电机停止转动。
2.程序:;================== 硬件实验步进电机控制=========================ORG 0CA0HDOJ0: MOV SP,#53HLCALL LEDPDOJ6: LCALL X2 ;X1 ;调键扫显示子程序(见软件实验十)JB ACC.4,DOJ5LCALL X3 ;调数字键处理子程序(见软件实验十)DB 79H,7EHSJMP DOJ6DOJ5: CJNE A,#16H,DOJ6 ;不是执行键转MOV A,7AHSWAP AORL A,79HMOV R6,A ;低字节步距数送R6 MOV A,7CHSWAP AORL A,7BHMOV R7,A ;高字节步距数R7 MOV A,7EHCJNE A,#00H,DOJ2 ;判转动方向DOJ1: MOV P1,#03H ;顺时针转动LCALL DEL0YLCALL GGJ0MOV P1,#06HLCALL DEL0YLCALL GGJ0MOV P1,#0CHLCALL DEL0YLCALL GGJ0MOV P1,#09HLCALL DEL0YLCALL GGJ0SJMP DOJ1DOJ2: MOV P1,#09H ;逆时针转动LCALL DEL0YLCALL GGJ0MOV P1,#0CHLCALL DEL0YLCALL GGJ0MOV P1,#06HLCALL DEL0YLCALL GGJ0MOV P1,#03HLCALL DEL0YLCALL GGJ0SJMP DOJ2DEL0Y: MOV A,7DH ;根据(7D)内容改变延时时间SWAP ACLR CRRC ARRC AMOV R2,ADELY1: MOV R5,#01HDEL1Y: LCALL DISDJNZ R5,DEL1YDJNZ R2,DELY1RETGGJ0: CJNE R7,#00H,GGJ1 ;步距数为0停止 CJNE R6,#00H,GGJ1 ;不为0减1后显示 AJMP DOJ4GGJ1: DJNZ R6,DOJ3CJNE R7,#00H,DDJ8DOJ4: LCALL DOJ7SJMP DOJ4DDJ8: DJNZ R7,DOJ3AJMP DOJ4DOJ3: LCALL DOJ7RETDOJ7: MOV R0,#79HMOV A,R6LCALL PTDS5MOV A,R7LCALL PTDS5LCALL SSEE ;显示RETPTDS5: MOV R1,AACALL PTDS6MOV A,R1PTDS6: ANL A,#0FHMOV @R0,AINC R0RETSSEE: SETB RS1 ;换工作区 MOV R5,#05HSSE2: MOV 30H,#20HMOV 31H,#7EHMOV R7,#06HSSE1: MOV R1,#0DDHMOV A,30HMOVX @R1,A ;字位送入 MOV R0,31HMOV A,@R0MOV DPTR,#DDFFMOVC A,@A+DPTR ;取字形代码 MOV R1,#0DCHMOVX @R1,A ;字形送入 MOV A,30H ;右移RR AMOV 30H,AMOV A,#0FFHMOVX @R1,A ;关显示DJNZ R7,SSE1 ;6位显示完了吗?DJNZ R5,SSE2 ;5次显示完了吗?CLR RS1RET五、实验结果及处理(数据暂时不填)六、实验结果分析及问题讨论1、根据步进电机的原理可知,步进电机可用于精确制动控制,旋转角度容易控制。
第1篇一、实验目的1. 熟悉步进电机的工作原理和特性。
2. 掌握步进电机的驱动方式及其控制方法。
3. 学会使用常用实验设备进行步进电机的调试和测试。
4. 了解步进电机在不同应用场景下的性能表现。
二、实验设备1. 步进电机:选型为双极性四线步进电机,型号为NEMA 17。
2. 驱动器:选型为A4988步进电机驱动器。
3. 控制器:选型为Arduino Uno开发板。
4. 电源:选型为12V 5A直流电源。
5. 连接线、连接器、电阻等实验配件。
三、实验原理步进电机是一种将电脉冲信号转换为角位移或线位移的电机。
它具有以下特点:1. 转动精度高,步距角可调。
2. 响应速度快,控制精度高。
3. 结构简单,易于安装和维护。
4. 工作可靠,寿命长。
步进电机的工作原理是:通过控制驱动器输出脉冲信号,使步进电机内部的线圈依次通电,从而产生步进运动。
四、实验步骤1. 搭建实验电路(1)将步进电机连接到驱动器上,确保电机线序正确。
(2)将驱动器连接到Arduino Uno开发板上,使用连接线连接相应的引脚。
(3)连接电源,确保电源电压与驱动器要求的电压一致。
2. 编写控制程序(1)使用Arduino IDE编写程序,实现步进电机的正转、反转、调速等功能。
(2)通过串口监视器观察程序运行情况,调试程序。
3. 调试步进电机(1)测试步进电机的正转、反转功能,确保电机转动方向正确。
(2)调整步进电机的转速,观察电机运行状态,确保转速可调。
(3)测试步进电机的步距角,确保步进精度。
4. 实验数据分析(1)记录步进电机的正转、反转、调速等性能参数。
(2)分析步进电机的运行状态,评估其性能。
五、实验结果与分析1. 正转、反转测试步进电机正转、反转功能正常,转动方向正确。
2. 调速测试步进电机转速可调,调节范围在1-1000步/秒之间。
3. 步距角测试步进电机的步距角为1.8度,与理论值相符。
4. 实验数据分析步进电机的性能指标符合预期,可满足实验要求。
一、实验目的1. 了解步进电动机的工作原理和驱动方式。
2. 掌握步进电动机的驱动电路设计方法。
3. 熟悉步进电动机的控制程序编写和调试方法。
4. 掌握步进电动机的速度和方向控制方法。
二、实验器材1. 步进电动机一台2. 步进驱动器一台3. 单片机实验板一块4. 电源模块一块5. 连接线若干6. 示波器一台7. 电脑一台三、实验原理步进电动机是一种将电脉冲信号转换为角位移或线位移的电机,其特点是输出角位移与输入脉冲数成正比,转速与脉冲频率成正比。
步进电动机的驱动电路主要由驱动器和控制电路组成。
驱动器负责将单片机输出的脉冲信号转换为步进电动机所需的驱动信号,而控制电路则负责生成步进电动机所需的脉冲信号。
四、实验步骤1. 步进电动机驱动电路设计(1)根据步进电动机的型号和规格,选择合适的驱动器。
(2)设计驱动电路原理图,包括驱动器、单片机、电源模块等。
(3)焊接驱动电路,并检查无误。
2. 步进电动机控制程序编写(1)编写步进电动机控制程序,包括初始化、脉冲生成、速度和方向控制等模块。
(2)通过示波器观察脉冲信号的波形,确保脉冲信号符合步进电动机的要求。
(3)调试程序,确保步进电动机能够按照预期运行。
3. 步进电动机速度和方向控制(1)通过调整脉冲频率控制步进电动机的转速。
(2)通过改变脉冲信号的顺序控制步进电动机的转动方向。
(3)观察步进电动机在不同速度和方向下的运行情况,分析控制效果。
五、实验结果与分析1. 步进电动机驱动电路设计成功,步进电动机能够按照预期运行。
2. 步进电动机控制程序编写成功,能够实现速度和方向控制。
3. 通过调整脉冲频率,步进电动机的转速在0-300转/分钟范围内可调。
4. 通过改变脉冲信号的顺序,步进电动机的转动方向可在正转和反转之间切换。
5. 实验结果表明,步进电动机的速度和方向控制方法可行,控制效果良好。
六、实验总结本次实验成功地实现了步进电动机的驱动电路设计、控制程序编写和速度、方向控制。
Arduino步进电机实验报告步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
实验目的:(1)了解步进电动机工作原理。
(2)熟悉步进电机驱动器使用方法。
(3)掌握步进电动机转向控制编程。
实验要求:(1)简要说明步进电动机工作原理。
(2)熟记步进电机驱动器的使用方法。
(3)完成步进电动机转速转向控制编程与实现。
(4)提交经调试通过的程序一份并附实验报告一份。
实验准备:1.Arduino UNO R3开发板Arduino是一块基于开放原始代码的Simple i/o平台,并且具有开发语言和开发环境都很简单、易理解的特点。
让您可以快速使用Arduino做出有趣的东西。
它是一个能够用来感应和控制现实物理世界的一套工具。
它由一个基于单片机并且开放源码的硬件平台,和一套为Arduino板编写程序的开发环境组成。
Arduino可以用来开发交互产品,比如它可以读取大量的开关和传感器信号,并且可以控制各式各样的电灯、电机和其他物理设备。
Arduino项目可以是单独的,也可以在运行时和你电脑中运行的程序(例如:Flash,Processing,MaxMSP)进行通讯。
2.ULN2003芯片ULN2003 是高耐压、大电流复合晶体管阵列,由七个硅NPN 复合晶体管组成。
可以用来驱动步进电机。
因本次使用的步进电机功率很小,所以可以直接使用一个ULN2003芯片进行驱动,如果是大功率的步进电机,是需要对应的驱动板的。
步进电机实验步进电机实验注意事项:1、系统通电后,身体的任何部位不要进入系统运动可达范围之内;2、实验中,请严格按照实验步骤进行操作,以防发生意外;3、实验完成后按下“停止”按钮,使电机停止运行,关闭电源;4、实验中注意用电安全,如遇紧急情况立即拨动电源开关,切断电源。
一、步进电机调速实验1、实验目的1.1熟悉步进电机的工作原理;1.2了解步进电机调速的方法;1.3 了解目标频率和转速之间的关系;1.4 掌握步进调速平台的操作方法。
2、实验设备1、步进电机测试平台一套3、实验原理(1)步进的工作原理步进电机是一种作为控制用的特种电机,它的旋转是以固定的角度(称为“步距角”)一步一步运行的,广泛应用于开环控制。
通过控制步进电机的脉冲频率,可以对电机进行精确调速;控制步进电机的脉冲个数,可以对电机精确定位。
步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB)。
永磁式步进电机一般为两相,转距和体积较小, 步距角一般为7.5°或15°;反应式步进一般为三相,可实现大转矩输出,步距角一般为1.5°,但噪声和振动都很大。
混合式步进电机是混合了永磁式和反应式的优点,可分为两相和五相。
两相混合式步进电机步距角一般为1.8°,而五相混合式步进电机步距角一般为0.72°。
混合式步进电机的应用最为广泛,本测试平台使用的步进电机即为步距角为1.8°的两相混合式步进电机。
( 2 ) 步进驱动器的参数及设置驱动器的细分步进电机通过细分驱动器的驱动,其步距角变小了,如驱动器工作在10细分状态时,其步距角只为电机固有步距角的十分之一,也就是说,当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动1.8°;而用细分驱动器工作在10细分状态时,电机只转动了0.18°,这就是细分的基本原理。
细分功能究全是由驱动器靠精确控制电机的相电流所产生, 与电机无关。
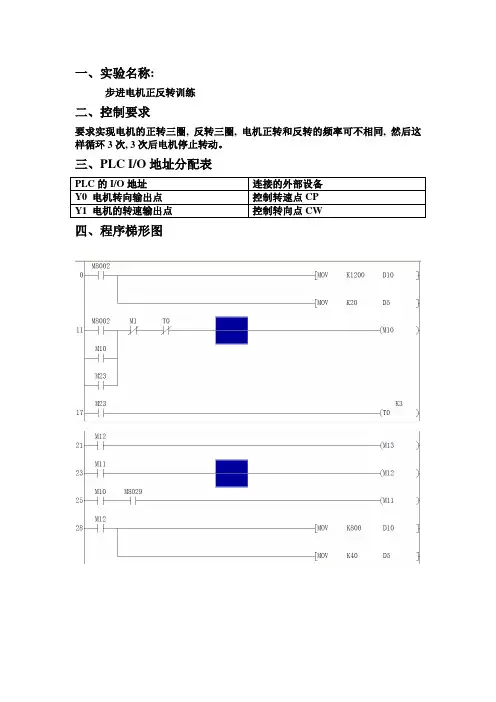
一、实验名称:
步进电机正反转训练
二、控制要求
要求实现电机的正转三圈, 反转三圈, 电机正转和反转的频率可不相同, 然后这样循环3次, 3次后电机停止转动。
三、PLC I/O地址分配表
PLC的I/O地址连接的外部设备
Y0 电机转向输出点控制转速点CP
Y1 电机的转速输出点控制转向点CW
四、程序梯形图
五、程序分析:
M11.M12、M13的波形图M21.M22.M23的波形图
电机正转的频率是20赫兹, 通过MOV指令送到D5中, 在电机正传三圈后, 电机反转, 反转的频率是40赫兹, 通过MOV指令送到D5中。
电机正转3次, 反转2次, 再通过M23得电进入正转, 重复上面的循环, 即电机正转后再反转, M23才得电一次, 所以可以加一个M23控制一个计数器计数, 当计数器计数到3时, 再通过计数器的常闭开关把M10线圈断电, 从而实现电机停止。
一、实验目的1. 了解布进电机的原理及结构;2. 掌握布进电机的驱动方法;3. 通过实验验证布进电机的性能。
二、实验原理布进电机(Stepper Motor)是一种将电脉冲信号转换为角位移的电机。
它由定子和转子组成,定子上的绕组按一定的规律排列,转子上的磁极与定子上的绕组相对应。
当给绕组通电时,会产生磁场,转子上的磁极会受到磁场的作用,产生转动。
布进电机的特点如下:1. 步进精度高,控制简单;2. 转速与脉冲数成正比;3. 可逆性,可实现正转和反转;4. 定位精度高,可实现精确定位。
三、实验仪器与材料1. 布进电机;2. 步进驱动器;3. 电源;4. 脉冲信号发生器;5. 万用表;6. 电阻、电容等元器件。
四、实验步骤1. 连接布进电机与步进驱动器,确保连接正确;2. 使用脉冲信号发生器产生脉冲信号,连接到步进驱动器的控制端;3. 接通电源,给步进驱动器供电;4. 调整脉冲信号发生器的频率和脉冲数,观察布进电机的转动情况;5. 使用万用表测量布进电机的电流和电压,分析其性能;6. 改变脉冲信号发生器的频率和脉冲数,观察布进电机的转速和定位精度;7. 改变步进驱动器的控制方式,如半步、全步等,观察布进电机的转动情况;8. 实验结束后,整理实验器材。
五、实验结果与分析1. 当脉冲信号发生器的频率为1kHz时,布进电机的转速约为120r/min;2. 当脉冲信号发生器的频率为2kHz时,布进电机的转速约为240r/min;3. 当脉冲信号发生器的频率为3kHz时,布进电机的转速约为360r/min;4. 当脉冲信号发生器的频率为4kHz时,布进电机的转速约为480r/min;5. 改变步进驱动器的控制方式,如半步、全步等,布进电机的转速和定位精度均有所变化。
通过实验可知,布进电机的转速与脉冲信号发生器的频率成正比,转速与脉冲数成正比。
改变步进驱动器的控制方式,可影响布进电机的转速和定位精度。
六、实验总结1. 本实验成功验证了布进电机的原理及性能;2. 掌握了布进电机的驱动方法;3. 了解布进电机的应用领域;4. 培养了实验操作和数据分析能力。
第1篇一、实验目的1. 理解步进电机的工作原理及控制方法。
2. 掌握单片机与步进电机驱动模块的接口连接方法。
3. 学习使用C语言编写程序,实现对步进电机的正反转、转速和定位控制。
4. 通过实验,加深对单片机控制系统的理解。
二、实验原理步进电机是一种将电脉冲信号转换为角位移或线位移的电机,其特点是控制精度高、响应速度快、定位准确。
步进电机控制实验主要涉及以下几个方面:1. 步进电机驱动模块:常用的驱动模块有ULN2003、A4988等,它们可以将单片机的数字信号转换为步进电机的控制信号。
2. 单片机:单片机是整个控制系统的核心,负责接收按键输入、处理数据、控制步进电机驱动模块等。
3. 步进电机:步进电机分为单相、双相和三相等类型,本实验使用的是双相四线步进电机。
三、实验设备1. 单片机开发板:例如STC89C52、STM32等。
2. 步进电机驱动模块:例如ULN2003、A4988等。
3. 双相四线步进电机。
4. 按键。
5. 数码管。
6. 电阻、电容等元件。
7. 电源。
四、实验步骤1. 硬件连接(1)将步进电机驱动模块的输入端(IN1、IN2、IN3、IN4)分别连接到单片机的P1.0、P1.1、P1.2、P1.3口。
(2)将按键的输入端连接到单片机的P3.0口。
(3)将数码管的段选端连接到单片机的P2口。
(4)将步进电机驱动模块的电源端连接到电源。
(5)将步进电机连接到驱动模块的输出端。
2. 编写程序(1)初始化单片机I/O端口,设置P1口为输出端口,P3.0口为输入端口,P2口为输出端口。
(2)编写按键扫描函数,用于读取按键状态。
(3)编写步进电机控制函数,实现正反转、转速和定位控制。
(4)编写主函数,实现以下功能:a. 初始化数码管显示;b. 读取按键状态;c. 根据按键状态调用步进电机控制函数;d. 更新数码管显示。
3. 调试程序(1)将程序烧写到单片机中;(2)打开电源,观察数码管显示和步进电机运行状态;(3)根据需要调整程序,实现不同的控制效果。
实验八步进实验8.1 实验目的掌握步进电机的控制方法8.2 实验设备PC机一台,TD-PIT实验装置一套。
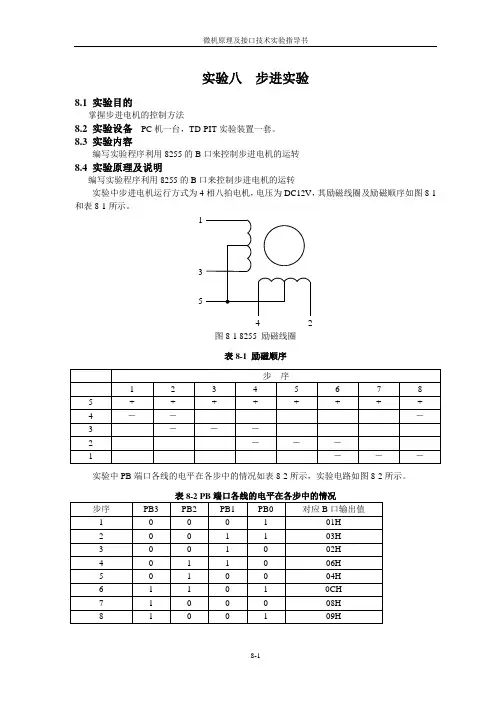
8.3 实验内容编写实验程序利用8255的B口来控制步进电机的运转8.4 实验原理及说明编写实验程序利用8255的B口来控制步进电机的运转实验中步进电机运行方式为4相八拍电机,电压为DC12V,其励磁线圈及励磁顺序如图8-1和表8-1所示。
13542图8-1 8255 励磁线圈表8-1 励磁顺序实验中PB端口各线的电平在各步中的情况如表8-2所示,实验电路如图8-2所示。
表8-2 PB端口各线的电平在各步中的情况总线接口图8-2 步进电机实验参考接线图参考程序如下:; filename: bujin.asmMY8255_A EQU 0E460H ; 9C60H MY8255_B EQU 0E461H ; 9C61H MY8255_C EQU 0E462H ; 9C62H MY8255_MODE EQU 0E463H ; 9C63HSTACK_seg SEGMENT STACKDW 256 DUP(?)STACK_seg ENDSDA TA SEGMENTPHASE_TABLE DB 01H, 03H, 02H, 06H, 04H, 0CH, 08H, 09H;; 电机的通电相序DA TA ENDSCODE SEGMENTASSUMECS:CODE,DS:DA TA,SS:STACK_segSTART: MOV AX,DA TAMOV DS,AXMAIN: M OV DX,MY8255_MODEMOV AL,80H ;;1,00,0, 0,0,0,0B ; PA,BC均为输出方式OUT DX,ALA1: MOV BX,OFFSET PHASE_TABLE MOV CX,0008H A2: MOV AL,[BX]MOV DX,MY8255_BOUT DX,ALCALL DALLYINC BXLOOP A2CALL BREAKJMP A1DALLY: PUSH CXPUSH AXMOV CX,0FFFH ;; 延时调整A3: MOV AX,5000HA4: DEC AXJNZ A4LOOP A3POP AXPOP CXRETBREAK PROC NEARMOV AH,06HMOV DL,0FFHINT 21HJE RETURNMOV AL,00H;;程序退出时所有相不通电,防止电机发热MOV DX,MY8255_BOUT DX,ALMOV AX,4C00HINT 21H RETURN: RET BREAK ENDPCODE ENDSEND START8.4实验步骤1)对照图示,完成线路连接;2)编写程序,完成汇编,连接;3)打开实验箱电源,运行程序,观察步进电机的转动情况。
一、实验目的1. 熟悉步进电机的工作原理和特性。
2. 掌握通过微机控制步进电机的基本方法。
3. 了解步进电机在微机控制下的应用。
二、实验原理步进电机是一种将电脉冲信号转换为角位移或线位移的电机,其特点是步进角固定,控制精度高,响应速度快。
步进电机的工作原理是:当给步进电机输入一定频率的脉冲信号时,电机就会以一定的步进角进行旋转。
步进电机的控制方式主要有以下几种:1. 单相控制:将步进电机绕组分为A、B、C、D四相,每相依次通电,实现电机的旋转。
2. 双相控制:将步进电机绕组分为A、B两相,通过改变A、B两相的通电顺序,实现电机的旋转。
3. 四相控制:将步进电机绕组分为A、B、C、D四相,通过改变A、B、C、D四相的通电顺序,实现电机的旋转。
三、实验设备1. 微机:一台2. 步进电机驱动器:一台3. 步进电机:一台4. 编程软件:例如Keil、IAR等5. 连接线:若干四、实验内容1. 步进电机基本特性测试(1)观察步进电机在不同脉冲频率下的转动情况。
(2)观察步进电机在不同脉冲数下的转动角度。
2. 步进电机单相控制(1)编写程序,实现步进电机单相控制。
(2)测试步进电机单相控制下的转动情况。
3. 步进电机双相控制(1)编写程序,实现步进电机双相控制。
(2)测试步进电机双相控制下的转动情况。
4. 步进电机四相控制(1)编写程序,实现步进电机四相控制。
(2)测试步进电机四相控制下的转动情况。
5. 步进电机转速控制(1)编写程序,实现步进电机转速控制。
(2)测试步进电机在不同转速下的转动情况。
6. 步进电机转向控制(1)编写程序,实现步进电机转向控制。
(2)测试步进电机正转和反转的情况。
五、实验步骤1. 连接步进电机驱动器和步进电机。
2. 在微机上编写程序,实现步进电机的基本控制。
3. 编写程序,实现步进电机单相、双相、四相控制。
4. 编写程序,实现步进电机转速和转向控制。
5. 运行程序,观察步进电机的转动情况。
一、实验目的1. 了解步进电机的工作原理,掌握其控制方式和调速方法。
2. 学习使用微机对步进电机进行控制,提高微机应用能力。
3. 培养实验操作和数据分析能力。
二、实验设备及器件1. 微机一台2. 步进电机驱动器一台3. 步进电机一台4. 电源一个5. 连接导线若干三、实验原理步进电机是一种将电脉冲信号转换为角位移或线位移的电机,具有定位精度高、响应速度快、控制简单等优点。
步进电机的工作原理是利用电机的磁极与定子磁极之间的磁力相互作用,通过控制脉冲信号的输入,使电机产生相应的角位移。
步进电机的控制方式主要有以下几种:1. 单拍控制:每输入一个脉冲信号,电机转动一个步距角。
2. 双拍控制:每输入两个脉冲信号,电机转动一个步距角。
3. 四拍控制:每输入四个脉冲信号,电机转动一个步距角。
步进电机的调速方法主要有以下几种:1. 脉冲频率调速:通过改变脉冲信号的频率,实现电机转速的调节。
2. 脉冲宽度调速:通过改变脉冲信号的宽度,实现电机转速的调节。
3. 脉冲分配调速:通过改变脉冲信号的分配方式,实现电机转速的调节。
四、实验步骤1. 将步进电机驱动器连接到微机,确保连接正确。
2. 将步进电机连接到驱动器,确保连接牢固。
3. 将电源连接到驱动器,确保电源电压符合要求。
4. 编写程序,实现步进电机的控制功能。
5. 调试程序,观察步进电机的转动情况。
6. 分析实验结果,总结实验经验。
五、实验程序以下是一个简单的步进电机控制程序,实现单拍控制方式:```c#include <reg51.h>#define STEP_PIN P2 // 定义步进电机控制端口void delay(unsigned int ms) {unsigned int i, j;for (i = 0; i < ms; i++)for (j = 0; j < 123; j++);}void main() {while (1) {STEP_PIN = 0x01; // 输入第一个脉冲信号delay(100); // 延时STEP_PIN = 0x00; // 清除脉冲信号delay(100); // 延时}}```六、实验结果与分析1. 在实验过程中,通过改变脉冲信号的频率,实现了步进电机的调速。
步进电机测速实验报告步进电机是一种特殊的电动机,它的转动步进角度是固定的。
步进电机广泛应用于各种领域,例如打印机、机床和机器人等。
因为步进电机的步进角度与控制信号的脉冲数是线性相关的,因此步进电机的速度控制通常是通过控制脉冲数来实现的。
本实验旨在通过实际测速来验证步进电机速度与脉冲数之间的关系。
二、实验原理步进电机的角速度与脉冲频率之间存在一定的对应关系,通常可以使用脉冲频率来控制步进电机的转动速度。
步进电机的转速可以通过计算单位时间内的脉冲数来间接得到。
实验设备:步进电机、恒流驱动器、信号发生器、数显频率计、示波器等。
步进电机的测速实验流程如下:1. 连接步进电机与恒流驱动器,保证电机正常工作。
2. 设置信号发生器的频率、占空比以及信号发生模式,保证输出脉冲信号的稳定性和精确性。
3. 将信号发生器的输出信号连接到恒流驱动器的脉冲输入端,通过改变脉冲频率来控制步进电机的转速。
4. 使用示波器观察步进电机的转动状态,确定电机的运动是否正常。
5. 连接数显频率计到电机驱动器的输出端,设置合适的测量范围和触发模式,测量电机的转速。
6. 记录测量数据,通过分析数据得出步进电机转速与脉冲频率的对应关系。
三、实验过程1. 搭建实验电路,并接通电源,保证电机和仪器处于正常工作状态。
2. 设置信号发生器的频率和占空比,将输出信号接入恒流驱动器的脉冲输入端。
3. 观察步进电机的转动状态,调整信号发生器的频率,使电机转动稳定。
4. 连接数显频率计到电机驱动器的输出端,设置适当的量程和触发模式。
5. 测量步进电机的转速,在不同的频率下进行多次测量,得到数据。
6. 统计测量数据,分析步进电机转速与脉冲频率之间的关系。
四、实验结果根据实验测量数据,将步进电机的转速与信号发生器的频率进行对比,得到如下关系:脉冲频率(f) 转速(转/分钟)100 300200 600300 900400 1200500 1500五、实验分析通过实验数据的分析可以得到步进电机转速与信号发生器脉冲频率之间存在线性关系。
实验八步进电机驱动实验
一.实验要求
利用8255的PC口PC0-PC3轮流输出脉冲序列,实验机上键盘控制步进电机的转速和转动方向。
二.实验目的
1.了解控制步进电机的基本原理。
2.掌握控制步进电机转动的编程方法。
三.实验电路及连线
CS8255接200H,CS8279已固定接至238H。
PC0-PC3接至SMA-SMD。
四.实验说明
1. 本实验提供的程序是供四相步进电机使用。
本实验使用的步进电机用直流+12V电压,电机线圈由A、B、C、D四相组成。
2. 驱动方式为四相单四拍方式,各线圈通电顺序如下表。
表中首先向A相线圈输入驱动电流,接着向B,C,D线圈通电,最后又返回到A相线圈驱动,按这种顺序轮流切换,电机轴按顺时针方向旋转。
若通电顺序相反,则电机轴按逆时针方向旋转。
3. 在运行过程中,可按动小键盘的“0─9”数码键,控制步进电机的转速,按“B或C”键控制步进电机的方向,按“F”键退出。
五.实验程序框图。
8-2 步进电机实验一、概述步进电机又称脉冲电机,是数字控制系统中的一种重要的执行元件,它是将电脉冲信号变换成转角或转速的执行电动机,其角位移量与输入电脉冲数成正比;其转速与电脉冲的频率成正比。
在负载能力范围内,这些关系将不受电源电压、负载、环境、温度等因素的影响,还可在很宽的范围内实现调速,并能快速启动、制动和反转。
随着数字技术和电子计算机的发展,使步进电机的控制更加简便,灵活和智能化。
现已广泛应用于各种数控机床、绘图机、自动化仪表、计算机外设,数模转换等数字控制系统中作为执行元件。
因此在高校、职大、中专等电机实验中开设步进电机实验,让学生更好的掌握其原理、主要特性及实验方法是非常必要的。
二、简介RTDJ17步进电机实验装置由步进电机智能控制箱和步进电机实验装置两部分组成。
(一)步进电机智能控制箱本控制箱用以控制步进电动机的各种运行方式,它的各种控制功能是由单片机来实现的。
通过键盘的操作和不同的显示方式来确定步进电机制运行状况。
本装置可适用于三相、四相、五相步进电动机各种运行方式的控制。
因实验装置仅提供三相反应式步进电动机,故控制箱只提供三相步进电动机的驱动电源。
1、面板示意图(1)输入脉冲频率显示器:连续运行时用于显示输入驱动板的CP脉冲频率。
(2)步进电机运行状态显示器:操作键盘用于指示各种设定状态,电机运行状态下用于指示各种运行状态。
(3)脉冲指示灯:当某一相有脉冲时对应指示灯亮,表示此相有脉冲输入。
(4)键盘:用于步进电机各种运行状态的设定和系统的复位等。
(5)脉冲观测孔:当某一相有脉冲时对应信号为高电平。
(6)脉冲输出孔:接好电机时当某一相有脉冲时对应相有电流流过,使用时接步进电机各对应相。
(7) 48伏直流电源输出:此处提供一直流电源,最低输出为48伏。
(8)电源开关:系统电源总开关。
(9)把手固定孔。
(10)面板固定孔。
(11) 48V电源保险:0.5A。
(12)系统电源总保险:0.5A。
步进电机实验-实习训练报告暨教案第一章:实验目的和意义1.1 实验目的理解步进电机的工作原理学会步进电机的驱动方法和控制技巧掌握步进电机的速度和位置控制方法1.2 实验意义培养学生的动手能力和实验技能加深学生对步进电机理论知识的理解提高学生运用步进电机解决实际问题的能力第二章:步进电机简介2.1 步进电机的发展历程介绍步进电机的历史和发展趋势2.2 步进电机的工作原理解释步进电机的构造和工作原理介绍步进电机的转子、定子和绕组等基本组成部分2.3 步进电机的特点和应用领域阐述步进电机的优点和缺点举例说明步进电机在各个领域的应用第三章:步进电机的驱动电路3.1 步进电机驱动电路的组成介绍步进电机驱动电路的基本组成部分解释驱动电路的作用和功能3.2 步进电机驱动电路的设计要点讲解步进电机驱动电路的设计原则和方法强调电路中的关键元件和参数选择3.3 步进电机驱动电路的调试与优化介绍步进电机驱动电路的调试方法和技巧讲解如何优化驱动电路的性能和稳定性第四章:步进电机的控制方法4.1 步进电机的速度控制介绍步进电机速度控制的方法和原理讲解如何实现步进电机的速度调节和控制4.2 步进电机的位置控制解释步进电机位置控制的概念和方法介绍如何通过脉冲信号和方向信号控制步进电机的运动4.3 步进电机的混合控制策略探讨步进电机速度和位置的混合控制方法分析不同控制策略的优缺点和适用场景第五章:实验步骤与数据处理5.1 实验设备的准备和连接介绍实验所需设备的清单和连接方式强调实验设备的安全使用和注意事项5.2 步进电机的驱动和控制实验详细讲解实验步骤和操作方法指导学生进行步进电机的驱动和控制实验5.3 实验数据的采集与处理介绍实验数据的采集方法和工具讲解如何处理实验数据并进行分析总结第六章:实验结果分析6.1 步进电机转速与脉冲频率的关系分析实验中步进电机转速与脉冲频率的数据讨论脉冲频率对步进电机转速的影响6.2 步进电机位置控制的精度分析实验中步进电机位置控制的精度数据讨论影响步进电机位置控制精度的因素6.3 步进电机速度与负载的关系分析实验中步进电机速度与负载的数据讨论负载对步进电机速度的影响第七章:实验问题与解决方案7.1 步进电机驱动电路的故障排查介绍步进电机驱动电路可能出现的问题和解决方案强调故障排查的方法和技巧7.2 步进电机控制信号的误动作问题分析步进电机控制信号误动作的原因提出解决方案和预防措施7.3 步进电机运行中的噪音和振动问题讨论步进电机运行中噪音和振动产生的原因给出解决噪音和振动问题的方法和建议8.1 实验报告的结构和内容要求介绍实验报告的基本结构和内容要求8.2 实验数据的整理和表述方法讲解实验数据的整理方法和表述技巧8.3 实验结论和总结强调实验报告中的逻辑性和条理性第九章:实验拓展与思考9.1 步进电机的应用场景拓展探讨步进电机在其他领域的应用可能性引导学生思考步进电机在不同应用场景下的优势和局限性9.2 步进电机的研究与发展趋势介绍步进电机的研究现状和未来发展趋势引导学生关注步进电机领域的最新进展和技术创新9.3 步进电机实验的改进与优化鼓励学生思考如何改进和优化步进电机实验引导学生提出创新性的实验方案和改进措施第十章:附录与参考文献10.1 实验所用设备和材料清单列出实验所需设备和材料的详细信息提供购买和使用这些设备和材料的建议和途径10.2 实验参考文献推荐与步进电机实验相关的参考书籍、论文和网络资源帮助学生深入了解步进电机的相关理论和实践知识十一章:实验安全与环境保护11.1 实验安全知识介绍实验过程中可能存在的安全隐患讲解步进电机实验中的安全操作规程11.2 实验室规章制度强调实验室的基本规章制度引导学生遵守实验室安全规范11.3 环境保护与废物处理讲解实验过程中如何进行环境保护介绍步进电机实验废物的处理方法十二章:实验评价与反思12.1 实验评价标准设定步进电机实验的评价标准和评分方法强调评价标准中的关键要素12.2 学生自我评价与反思指导学生进行自我评价和反思鼓励学生总结实验过程中的收获和不足12.3 实验指导教师的评价与反馈介绍实验指导教师评价的内容和方法强调教师评价对学生实验能力提升的重要性十三章:实验报告示例13.1 实验报告模板提供一份实验报告的模板13.2 实验报告示例分析分析一份优秀的实验报告案例引导学生学习报告中的优点,避免类似错误十四章:实验辅导与答疑14.1 实验过程中遇到的问题及解决方案收集学生在实验过程中遇到的问题提供针对性的解决方案和指导14.2 实验辅导与答疑方式介绍实验辅导的方式和途径强调答疑对于学生实验能力提升的重要性十五章:课后作业与练习15.1 课后作业布置布置与步进电机实验相关的课后作业强调作业的目的和重要性15.2 练习题解析提供课后练习题及详细解析帮助学生巩固实验相关知识,提升实验技能重点和难点解析本文档详细介绍了步进电机实验的实习训练报告暨教案,涵盖了实验目的、意义、步进电机简介、驱动电路、控制方法、实验步骤与数据处理等多个方面。
步进电机运动实验
一、实验目的
1.了解步进电机的工作原理。
2.掌握步进电机与滚珠丝杆之间的计算关系,为plc编程作准备.
二、步进电机工作原理
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机运动特性:
三、实验准备
1.查阅步进电机说明书,初步了解57H46403步进电机的特性:
2.测量滚珠丝杠的导程
3.掌握步进电机与滚珠丝杠间计算公式
4.设计自己所要实现的运动
5.了解移栽机整个工作过程,水平竖直运动情况
四、步进电机与滚珠丝杠的相关计算
(1)
(2)发一个脉冲步进电机转过一个,与此同时滚珠丝杠的位移为
n—步进电机转速;步距角;f—脉冲频率;
p—滚珠丝杠导;x—脉冲当量
五、实验设计
要实现滚珠丝杆先有位移mm,之后反向运动mm。
通过上面公式进行计算。
得到需要给步进电机的正转脉冲数为;反转脉冲数为;
六、实验拓展
1.与同学相互交流,写出该幼苗移栽机器人的工作原理。
2.对于该机器人的设计,提出自己的想法。
附录:电机说明书。
一、实验目的1. 了解步进电机的工作原理和特点。
2. 掌握步进电机的驱动方式和控制方法。
3. 学会使用PLC编程控制步进电机。
4. 培养动手能力和实验技能。
二、实验原理步进电机是一种将电脉冲信号转换成角位移的电动机,具有精度高、响应快、控制简单等优点。
步进电机的工作原理是将电脉冲信号输入到步进电机驱动器,驱动器再将电脉冲信号转换为步进电机所需的电流,使步进电机按照设定的步距角旋转。
三、实验仪器与设备1. PLC编程器2. 步进电机驱动器3. 步进电机4. 电源5. 连接导线6. 电脑四、实验步骤1. 步进电机驱动器与PLC的连接:将步进电机驱动器的输入端连接到PLC的输出端口,将电源连接到步进电机驱动器。
2. 步进电机与驱动器的连接:将步进电机连接到驱动器的输出端。
3. PLC编程:在PLC编程器中编写步进电机控制程序。
(1)设置步进电机控制参数:包括步进电机的步距角、脉冲频率等。
(2)编写步进电机控制程序:编写程序控制步进电机的启动、停止、正转、反转等功能。
4. 程序下载与运行:将编写好的程序下载到PLC中,运行程序控制步进电机。
五、实验结果与分析1. 步进电机启动:按下启动按钮,步进电机开始旋转。
2. 步进电机正转:按下正转按钮,步进电机按照设定的步距角正转。
3. 步进电机反转:按下反转按钮,步进电机按照设定的步距角反转。
4. 步进电机停止:按下停止按钮,步进电机停止旋转。
六、实验总结通过本次实验,我们了解了步进电机的工作原理和特点,掌握了步进电机的驱动方式和控制方法。
同时,学会了使用PLC编程控制步进电机,提高了我们的动手能力和实验技能。
以下为实验过程中的关键代码段:1. 步进电机控制参数设置:```步距角= 1.8°脉冲频率 = 1000Hz```2. 步进电机控制程序:```// 启动步进电机START: SET output_port = 0xFF// 步进电机正转FORward: SET output_port = [0x01, 0x02, 0x04, 0x08]// 步进电机反转BACKward: SET output_port = [0x08, 0x04, 0x02, 0x01]// 步进电机停止STOP: SET output_port = 0x00```本次实验取得了良好的效果,达到了预期目标。
实验八步进实验
8.1 实验目的
掌握步进电机的控制方法
8.2 实验设备PC机一台,TD-PIT实验装置一套。
8.3 实验内容
编写实验程序利用8255的B口来控制步进电机的运转
8.4 实验原理及说明
编写实验程序利用8255的B口来控制步进电机的运转
实验中步进电机运行方式为4相八拍电机,电压为DC12V,其励磁线圈及励磁顺序如图8-1和表8-1所示。
1
3
5
4
2
图8-1 8255 励磁线圈
表8-1 励磁顺序
实验中PB端口各线的电平在各步中的情况如表8-2所示,实验电路如图8-2所示。
表8-2 PB端口各线的电平在各步中的情况
总
线
接
口
图8-2 步进电机实验参考接线图参考程序如下:
; filename: bujin.asm
MY8255_A EQU 0E460H ; 9C60H MY8255_B EQU 0E461H ; 9C61H MY8255_C EQU 0E462H ; 9C62H MY8255_MODE EQU 0E463H ; 9C63H
STACK_seg SEGMENT STACK
DW 256 DUP(?)
STACK_seg ENDS
DA TA SEGMENT
PHASE_TABLE DB 01H, 03H, 02H, 06H, 04H, 0CH, 08H, 09H
;; 电机的通电相序
DA TA ENDS
CODE SEGMENT
ASSUME
CS:CODE,DS:DA TA,SS:STACK_seg
START: MOV AX,DA TA
MOV DS,AX
MAIN: M OV DX,MY8255_MODE
MOV AL,80H ;;1,00,0, 0,0,0,0B ; PA,BC均为输出方式
OUT DX,AL
A1: MOV BX,OFFSET PHASE_TABLE MOV CX,0008H A2: MOV AL,[BX]
MOV DX,MY8255_B
OUT DX,AL
CALL DALLY
INC BX
LOOP A2
CALL BREAK
JMP A1
DALLY: PUSH CX
PUSH AX
MOV CX,0FFFH ;; 延时调整A3: MOV AX,5000H
A4: DEC AX
JNZ A4
LOOP A3
POP AX
POP CX
RET
BREAK PROC NEAR
MOV AH,06H
MOV DL,0FFH
INT 21H
JE RETURN
MOV AL,00H
;;程序退出时所有相不通电,防止电机发热MOV DX,MY8255_B
OUT DX,AL
MOV AX,4C00H
INT 21H RETURN: RET BREAK ENDP
CODE ENDS
END START
8.4实验步骤
1)对照图示,完成线路连接;
2)编写程序,完成汇编,连接;
3)打开实验箱电源,运行程序,观察步进电机的转动情况。
注意步进电机不使用时请断开连线,以免误操作使电机过分发热。