高速打纬共轭凸轮运动规律的设计分析
- 格式:pdf
- 大小:234.97 KB
- 文档页数:3
一.配气凸轮优化设计1.1配气凸轮结构形式及特点配气凸轮是决定配气机构工作性能的关键零件,如何设计和加工出具有合理型线的凸轮轴是整个配气系统设计中最为重要的问题。
对内燃机气门通过能力的要求,实际上就是对由凸轮外形所决定的气门升程规律的要求,气门开启迅速就能增大时面值,但这将导致气门机构运动件的加速度和惯性负荷增大,冲击、振动加剧、机构动力特性变差。
因此,对气门通过能力的要求与机构动力特性的要求间存在一定矛盾,应该观察所设计发动机的特点,如发动机工作转速、性能要求、配气机构刚度大小等,主要在凸轮外形设计中兼顾解决发动机配气凸轮外形的设计也就是对凸轮从动件运动规律的设计。
从动件升程规律的微小差异会引起加速度规律的很大变动,在确定从动件运动规律时,加速度运动规律最为重要,通常用其基本工作段运动规律来命名,一般有下面几种:1.1.1等加速凸轮等加速凸轮的特点是其加速度分布采取分段为常数的形式,其中又可分为两类,一类可称为“正负零型”,指其相应的挺柱加速度曲线为正—负—零:另一类可称“正零负型”,指其加速度曲线为正一零一负。
当不考虑配气机构的弹性变形时,对最大正负加速度值做一定限制且在最大升程、初速度相同的各种凸轮中,这种型式的凸轮所能达到的时面值最大。
等加速型凸轮常常适用于平稳性易保证,而充气性能较差的中低速柴油机中。
但就实际情况而言,配气机构并非完全刚性,等加速凸轮加速度曲线的间断性必然会影响机构工作平稳性,在高速内燃机中一般不采用等加速型凸轮[9]。
1.1.2组合多项式型组合多项式型凸轮的基本段为一分段函数,它由几个不同的表达式拼接而成。
通过调整各段所占角度及函数方程,获得不同斜率的加速度曲线。
组合多项式型凸轮时面值大,而且能够方便地控制加速度变化率及确保正、负加速段间的圆滑过渡,可以较好地协调发动机充气性能及配气机构工作平稳性的要求[7]。
由于凸轮从动件运动规律由若干函数组成,在各段间联结点处不易保证升程规律三阶以上导数的连续性,可能会影响配气机构工作的平稳性,组合多项式型凸轮主要应用在要求气门时面值大和较好动力性能的情形。

适用于高速运动的凸轮机构从动件运动规律凸轮机构是常见的从动件,它利用凸轮的移动和定位来控制从动件的运动轨迹。
传统的凸轮机构可以在较低速度下实现良好的精度和定位能力,但是当要求高速节拍时,其节拍分辨率会受到限制,甚至出现扭曲。
为此,本文详细研究了高速运行时凸轮机构从动件运动规律,以便在此种情况下获得准确的定位精度和节拍分辨率。
1.对凸轮机构运动特性的研究首先,本文从理论上研究了凸轮机构的运动特性,该机构的形状是一个将偶合的凸轮圈板以浮动支承和滚动支承相互桥接的凸轮机构。
其动作过程可以分为三步:凸轮离合,凸轮移动以及凸轮定位。
其中,凸轮离合的目的是为了在偶合的凸轮圈板的表面形成有效的离合面,以实现凸轮间的连接;凸轮移动的目的是为了实现凸轮之间的位置变换,以实现从动件的移动;凸轮定位的目的是为了保证凸轮不滑动,也可以认为是为了实现从动件的节拍。
在凸轮机构运动特性的研究中,我们对凸轮机构的运动特性,以及其在不同节拍下的运动轨迹和运动规律进行了详细分析。
2.凸轮机构从动件运动轨迹分析接下来,我们详细研究凸轮机构从动件在高速运行时的运动规律。
研究发现,当从动件速度较低时,可通过改变凸轮离合力和移动距离来控制从动件的运动轨迹。
但是,当从动件运行速度加快时,凸轮离合力不变,而凸轮移动距离会因从动件节拍增加而减小,从而造成从动件运动轨迹的不规则性,从而影响从动件的定位精度和节拍分辨率。
3.凸轮机构从动件运动规律研究基于凸轮机构从动件运动轨迹的分析结果,本文研究了从动件在高速运行时的运动规律,从而获得良好的定位精度和节拍分辨率。
这其中主要有三个方面:(1)增加凸轮离合力,减小凸轮移动距离:凸轮离合力主要是指所需要的力量来将凸轮离合,凸轮移动距离则是指凸轮在离合状态下移动的总距离。
当凸轮离合力增加时,凸轮移动距离会减少,这将有助于保持凸轮的稳定位置,从而能够提高从动件的定位精度。
(2)增加凸轮圈板的硬度:凸轮圈板的硬度主要是指其偶合部分的硬度。
浅析高速凸轮机构的动态设计论文关键词:高速凸轮机构动力学模型动力学仿真论文摘要:建立了高速凸轮机构的动力学模型及其运动方程式,对具有摆线运动规律的从动件进行了动态响应的分析,并对凸轮机构进行动力学仿真,分析了从动件作用在凸轮上的作用力,为设计人员设计凸轮机构提供了一定的设计依据。
0引言高速凸轮机构中,由于构件的惯性力较大,构件的弹性变形及在激振力作用下系统的振动不能忽视,一方面它使得从动系统输出端的运动规律与输入端的运动规律存在差异,需要适当修正输入端运动规律,使输出端运动规律符合设计要求;另一方面,约束反力一直处于变化状态,了解约束反力的变化规律可为工程技术人员设计轴承和构件尺寸提供设计数据。
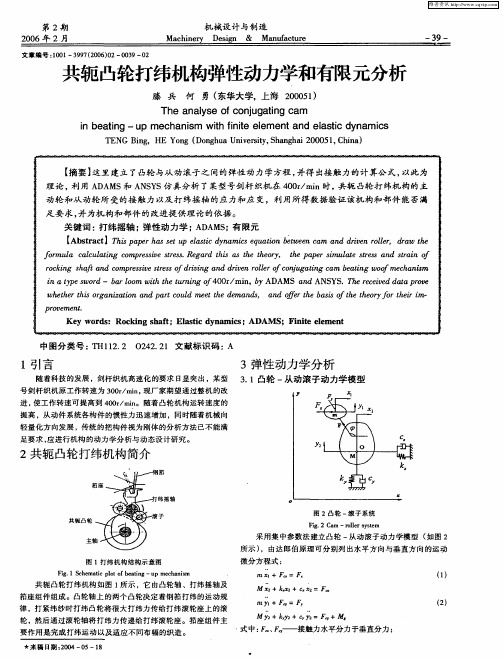
1凸轮机构动力学模型的建立及其动力学方程式为了简化计算,通常将构件的连续分布质量看作是集中在一点或若干点的集中质量,用无质量的弹簧来表示构件的弹性,用无质量、无弹性的阻尼元件表示系统的阻尼,并忽略一些次要的影响因素,从而把凸轮机构简化为由若干无弹性的集中质量和无质量的弹簧以及阻尼元件组成的弹性系统。
图1为偏置尖底直动从动件盘形凸轮机构及其动力学模型。
滚子和凸轮轴因刚性大可不计其弹性变形。
弹性系统的运动微分方程为:中E为从动件材料弹性模量,A为从动件截面积,1,为从动件长度;在不考虑工作载荷对凸轮机构输出件运动规律的影响,并忽略阻尼和锁合弹簧的弹簧刚度的情况下,该弹性系统的运动方程式简化为:2凸轮机构运动学仿真利用Matlab语言对凸轮机构进行运动学仿真。
假设凸轮轴采用铸铁,滚子采用青铜材料,从动件采用45钢(E ----- 206GPa , p= 7850kg/m3,直径为20mm,长度为1 000 mm,则m=2. 46k, kf=6. 5 Xl0’N/m,忽略锁合弹簧的弹簧刚度和系统阻尼系数,得到系统固有频率为:由于当激振频率与系统固有频率之比大于等于0. 1时,成为高速凸轮,取激振频率为800rad/s.摆线运动规律的加速度曲线没有突变,理论上不存在冲击,故常用于高速凸轮机构,下面运用摆线运动规律来求解动态下从动件的实际运动规律。
剑杆织机共轭凸轮打纬机构介绍作者:孙庆军来源:《纺织报告》 2018年第1期摘要介绍共轭凸轮打纬机构的组成和运动原理,对摆杆的运动规律进行分析,通过优化设计凸轮的轮廓曲线来满足使用要求。
关键词剑杆织机打纬共轭凸轮;运动规律;优化设计中图分类号:TH132.47 文献标识码:B1 剑杆织机共轭凸轮打纬机构1.1 组成和运动原理1- 主传动轴;2- 主凸轮;3- 副凸轮;4- 滚轮;5- 滚轮轴;6- 摇摆轴;7- 钢筘压块;8- 钢筘;9- 导轨梁(筘座);10- 铝支臂;11- 滚轮;图1 共轭凸轮打纬机构示意图共轭凸轮打纬机构包括共轭凸轮轴组件和打纬摇摆轴组件,打纬摇摆轴组件上的钢筘8、导轨梁9、铝支臂10、摇摆轴6 为刚性连接,如图1 所示。
共轭凸轮轴与主传动轴相连,凸轮轴上的共轭凸轮型面决定了打纬摇摆轴组件上钢筘的运行规律,当主传动轴1 回转时,主凸轮2推动滚轮4,使得导轨梁9 以摇摆轴6 为中心逆时针摆动,带动钢筘8 进行打纬动作。
打纬完毕后,副凸轮3 推动滚轮11,使导轨梁9 以摇摆轴6 为中心顺时针摆动。
当安装在导轨梁上的走剑板与机架两侧固定导轨的剑带通道处于平齐时,导轨梁便静止不动,剑头从两侧进出导轨梁上的走剑板,完成引纬动作。
1.2 机构特点共轭凸轮打纬机构属于高精密机械传动机构,主轴转动一周范围内的受力不均匀,速度高时,振动大。
共轭凸轮积极驱动摇摆轴打纬,筘座脚可以设计较短,可采用分离式结构,利用惯性打纬,以减少运动的冲击和能量消耗。
打纬力的大小,以及打纬时间的长短,通过设计共轭凸轮的型面来实现,从而适应不同的织造工艺。
剑头进出织口完成引纬动作时,摇摆轴组件在后死心是静止不动的,利于织机转速的提高。
可以实现较宽幅织机引纬动作的完成,打纬摇摆轴组件在后死心的静止时间可以设计成较长的时间,一般静止角为220° ~255°之间,幅宽大时大一点,织机转速高时小一点。
共轭凸轮式打纬机构
在无梭织机上,因为车速提高,允许载纬器通过梭口的时间更少,所以必须设法进一
步提高可引纬角,方能保证引纬的顺利进行。
共轭凸轮机构可按照工艺要求进行设计,实现预定的筘座运动规律,是目前在高速无梭织机上应用较多的打纬机构。
图9-7所示为片梭织机上的共轭凸轮式打纬机构。
在织机主轴1上装有一副共轭凸轮2和9。
凸轮2为主凸轮,它驱动转子3,实现筘座由后向前的摆动,凸轮9为副凸轮,它驱动转子8,实现筘座由前向后的摆动。
共轭凸轮回转一周,筘座脚6绕摇轴7往复摆动一次,通过筘夹5上固装的钢筘4向织口打入一根纬纱。
引纬期间,筘座静止不动,静止角为220~255°。
例如在筘幅216cm的片梭织机上,静止角为220°,筘座打纬的进程角为70°,打纬回程角为70°。
筘幅愈宽,则筘座静止角可设计得愈大。
图9-7 Sulzer片梭织机上的共轭凸轮式打纬机构
1-主轴 2-凸轮 3-转子 4-钢筘 5-筘夹 6-筘座脚 7-摇轴 8-转
子 9-凸轮
共轭凸轮式打纬机构与开口、引纬运动均可达到良好的配合,但制造精度较高,并要求有良好的润滑。
打纬机构要有良好的高速运行适应性,筘座往复摆动动程应小,摆动产生的振动也小。
为了使织机在
高速情况下能达到较小的振动,人们寻求筘座运动跃度连续条件下的各种运动规律。
例如高次多项式运动
规律,正弦和余弦分段组合的加速度规律,三解函数和直线交替7段组合的加速度规律,三角函数1/4周期和水平直线组成的9段加速度规律。