平面四杆机构的基本类型及其演化.ppt
- 格式:ppt
- 大小:740.01 KB
- 文档页数:18
第三讲课题:§3-1 平面四杆机构的基本类型及其演化教学目的:理解平面四杆机构的各种类型及其应用。
教学重点: 铰链四杆机构类型及其演化,理解曲柄存在条件。
教学难点:导杆机构教学方法:课堂演示、多媒体教学互动:每个知识点后提问或讨论。
教学安排:§3-1 平面四杆机构的基本类型及其演化复习旧课:机构组成,运动副,运动简图等。
平面连杆机构是常用的低副机构,其中以由四个构件组成的四杆机构应用最广泛,而且是组成多杆机构的基础。
因此本章着重讨论四杆机构的基本类型、性质及常用设计方法。
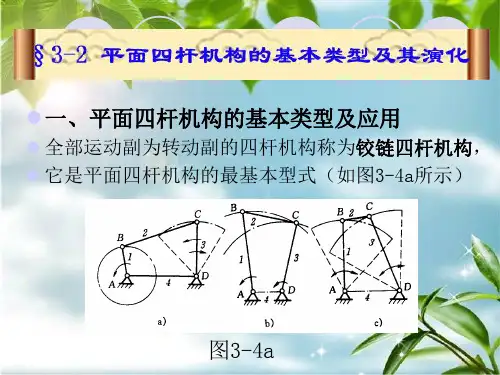
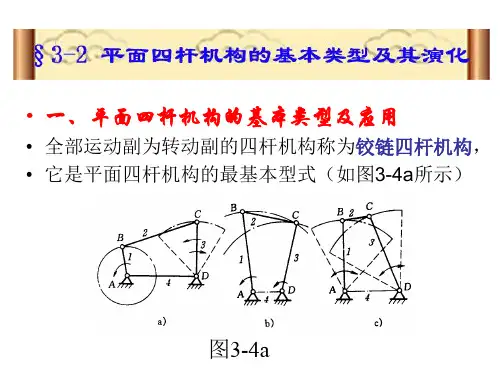
一、四杆机构的类型1.曲柄摇杆机构两连架杆一为曲柄,一为摇杆。
功能:将等速转动转换为变速摆动或将摆动转换为连续转动。
应用:雷达天线机构、缝纫机踏板机构。
2.双曲柄机构两连架杆都为曲柄功能:将等速转动转换为等速同向、不等速同向、不等速反向转动。
应用:惯性筛机构若两曲柄的长度相等,连杆与机架的长度也相等,则该机构称为平行双曲柄机构。
如铲斗机构还有反平行四边形机构,例:公共汽车车门启闭机构3.双摇杆机构两连架杆都为摇杆功能:一种摆动转换为另一种摆动。
应用:鹤式起重机、飞机起落架二、铰链四杆机构的曲柄存在条件证明:结论:铰链四杆机构存在一个曲柄的条件是:1.最短杆与最长杆长度之和小于或等于其余两杆长度之和2.曲柄为最短杆。
铰链四杆机构存在曲柄的条件是:1.最短杆与最长杆长度之和小于或等于其余两杆长度之和2.机架或连架杆为最短杆。
三、四杆机构类型判别否Lmax+Lmin< L' +L"是不可能有曲柄可能有曲柄最短杆对边最短杆最短杆邻边双摇杆机构曲柄摇杆机构双曲柄机构四、铰链四杆机构的演化1.曲柄滑块机构2.偏心轮机构3.导杆机构①摆动导杆机构(牛头刨床)②转动导杆机构③移动导杆机构4.摇块机构小结:本次课主要熟悉四杆机构的各种类型,了解它们的应用作业:预习下次课内容。
连杆机构的特点:优点:运动副单位面积所受的压力小且面接触受力小,便于润滑,磨损小;制造方便。
缺点:设计复杂误差大。
工作效率低。
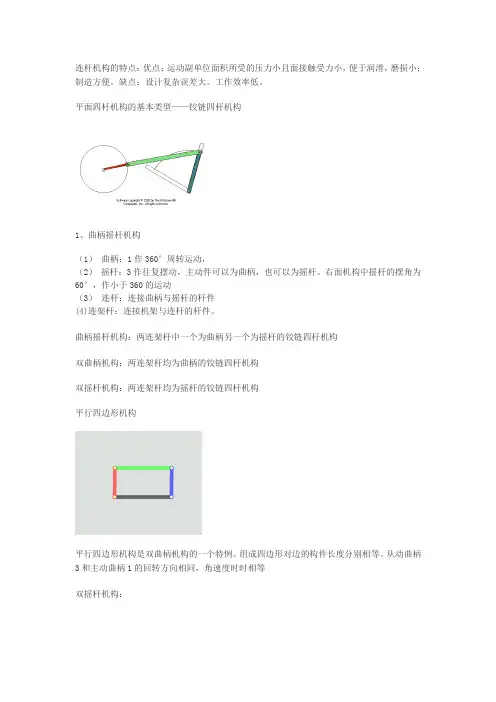
平面四杆机构的基本类型——铰链四杆机构1、曲柄摇杆机构(1)曲柄:1作360°周转运动,(2)摇杆:3作往复摆动,主动件可以为曲柄,也可以为摇杆。
右面机构中摇杆的摆角为60°,作小于360的运动(3)连杆:连接曲柄与摇杆的杆件(4)连架杆:连接机架与连杆的杆件。
曲柄摇杆机构:两连架杆中一个为曲柄另一个为摇杆的铰链四杆机构双曲柄机构:两连架杆均为曲柄的铰链四杆机构双摇杆机构:两连架杆均为摇杆的铰链四杆机构平行四边形机构平行四边形机构是双曲柄机构的一个特例。
组成四边形对边的构件长度分别相等。
从动曲柄3和主动曲柄1的回转方向相同,角速度时时相等双摇杆机构:构件1和3都作往复摆动,一般主动摇杆作等速摆动,从动摇杆作变速摆动。
平面四杆机构的演化形式(Ⅰ)——含一个移动副的四杆机构曲柄滑块机构正置曲柄滑块机构滑块(slider)铰链点的运动方位线通过曲柄转动中心,滑块动程(pitch)等于两倍曲柄1的长度,无急回运动特性。
主动件可以为曲柄,也可以为滑块。
偏置曲柄滑块机构滑块铰链点的运动方位线不通过曲柄转动中心,偏距(offset)为e,滑块动程大于两倍曲柄长度,有急回运动特性导杆机构转动导杆机构曲柄1和导杆3都能作360°周转运动,主动曲柄作等速转动,从动导杆作变速转动,摆动导杆机构曲柄1作360°周转运动,摆动导杆3作往复摆动,且有较大的急回运动特性曲柄摇块机构移动导杆机构构件2作往复摆动,构件4在滑块中作往复移动。
2 平面连杆机构的工作特性1、转动副为整转副的充分必要条件急回运动和行程速比系数原动曲柄转动一周过程中,有两次与连杆共线,即重叠共线和拉直共线,摇杆两个极限位置分别为C1D和C2D。
曲柄AB以等角速度ω顺时针转过α1角由位置AB1转到位置AB2,摇杆从C1D摆到C2D,摆角为φ,所需时间为t1,C点平均速度为V1。