《工程力学:第三章-力系的平衡条件和平衡方程》解析
- 格式:ppt
- 大小:1.38 MB
- 文档页数:19

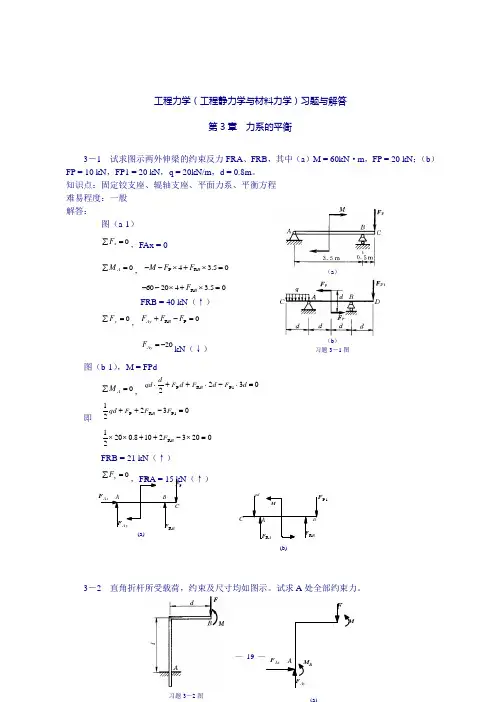
工程力学(工程静力学与材料力学)习题与解答第3章 力系的平衡3-1 试求图示两外伸梁的约束反力FRA 、FRB ,其中(a )M = 60kN ·m ,FP = 20 kN ;(b )FP = 10 kN ,FP1 = 20 kN ,q = 20kN/m ,d = 0.8m 。
知识点:固定铰支座、辊轴支座、平面力系、平衡方程 难易程度:一般 解答:图(a-1) 0=∑x F ,FAx = 00=∑A M ,05.34R P =⨯+⨯--B F F M 05.342060R =⨯+⨯--B F FRB = 40 kN (↑)=∑y F ,0P R =-+F F F B Ay20-=Ay F kN (↓)图(b-1),M = FPd 0=∑A M ,03221P R P =⋅-⋅++⋅d F d F d F dqd B即 032211P R P =-++F F F qd B 02032108.02021R =⨯-++⨯⨯B FFRB = 21 kN (↑)=∑y F ,FRA = 15 kN (↑)3-2 直角折杆所受载荷,约束及尺寸均如图示。
试求A 处全部约束力。
A MB Ay F B R F CAx F PF(a) M A B B R F A R F P 1F C qdBD(b)(a )(b ) 习题3-1图FMB习题3-3图sF W A F ABF BF AN F(a)知识点:固定端约束、平面力系、平衡方程 难易程度:一般 解答: 图(a ): 0=∑x F ,0=Ax F=∑y F ,=Ay F (↑)0=∑A M ,0=-+Fd M M AM Fd M A -=3-3 图示拖车重W = 20kN ,汽车对它的牵引力FS = 10 kN 。
试求拖车匀速直线行驶时,车轮A 、B 对地面的正压力。
知识点:固定端约束、平面力系、平衡方程 难易程度:一般解答: 图(a ):0)(=∑F A M 08.214.1NB S =⨯+⨯-⨯-F F W6.13NB =F kN=∑y F ,4.6NA =F kN3-4 图示起重机ABC 具有铅垂转动轴AB ,起重机重W = 3.5kN ,重心在D 。