单片机红绿灯的汇编语言程序设计
- 格式:doc
- 大小:49.50 KB
- 文档页数:7
基于51单片机的交通灯控制系统设计摘要:在日常生活中,交通信号灯的使用,市交通得以有效管理,对于疏导交通流量、提高道路通行能力,减少交通事故有明显效果。
交通灯控制系统由80C51单片机、键盘、LED 显示、交通灯延时组成。
系统除具有基本交通灯功能外,还具有时间设置、LED信息显示功能,市交通实现有效控制。
关键词:交通灯,单片机,自动控制一引言当今,红绿灯安装在个个道口上,已经成为疏导交通车辆最常见和最有效的手段。
但这个技术在19世纪就已经出现了。
1858年,在英国伦敦主要街头安装了以燃煤气为光源的红、蓝两色的机械般手势信号灯,用以指挥马车通行。
这是世界上最早的交通信号灯。
1868年,英国机械工程师纳伊特在伦敦威斯敏斯特区的会议大厦前的广场上,安装了世界上最早的煤气红绿灯。
它由红绿两以旋转方式玻璃提灯组成,红色表示“停止”,绿色表示“注意”。
1869年1月2日,煤气灯爆炸,是警察受伤,遂被取消!电气启动的红绿灯出现在美国,这种红绿灯由红黄绿三色圆形的投光器组成,1914年始装于纽约市5号大街的一座高塔上。
红灯亮表示“停止”,绿灯亮表示“通行”。
信号灯的出现,使得交通得以有效的管理,对于疏导交通流量、提高道路通行能力、减少交通事故有明显效果。
1968年,联合国《道路交通和道路标志信号协定》对各种信号灯的含义作了规定。
绿灯时通行信号灯,面对绿灯的车辆可以直行,左转弯和右转弯,除非两一种标志禁止某一种转向。
左右转弯车辆必需让合法的正在路口内行驶的车辆和过人行横线的行人优先通行。
红灯是禁行信号灯,面对红灯的车辆必需在交叉路口的停车线后停车。
黄灯是警告信号,面对黄灯的车辆不能越过停车线,但车辆已经十分接近停车线而不能安全停车的可以进入交叉路口!二概要设计2.1 设计思路利用单片机实现交通灯的控制,该任务分以下几个方面:a 实现红、绿、黄灯的循环控制。
要实现此功能需要表示三种不同颜色的LED灯分别接在P1个管脚,用软件实现。

单片机交通灯控制器的设计一. 设计任务在一十字路口设置交通灯,并用单片机对其进行合理的控制。
时间方向控制要求白天东西绿灯黄灯红灯南北红灯绿灯黄灯夜晚东西黄灯南北黄灯二. 总体设计方案现在流行的一种设计为两主干线相交的十字路。
本设计采用一主干道(南北方向),一从干道(东西方向)的路口,即主干道的通行时间为从干道的2倍。
在正常情况下,两干道的交通灯按图1进行转换,并以倒计数的方式将剩余时间显示在每个干道对应的两位LED上;另发挥部分为当出现紧急情况时,路口的交通灯全为红灯,紧急情况解除时,恢复到原来的状态。
其具体状态如图1。
状态持续时间/S 南北方向东西方向控制码绿黄红绿黄红1 40 亮灭灭灭灭亮01111110B2 5 灭亮灭灭灭亮10111110B3 20 灭灭亮亮灭灭11001111B4 5 灭灭亮灭亮灭11011101B5 按紧急键灭灭亮灭灭亮11011110B6 按夜晚键灭亮灭灭亮灭01111100B7 按恢复键恢复恢复恢复恢复恢复恢复恢复原来其系统框图如图2。
三.硬件电路的设计1. 单片机系统单片机系统采用atmel公司的AT89C51芯片,晶振选用6MHZ,电源电压采用5V。
其总体系统电路图见图3。
2. 信号灯与按钮电路的设计信号灯采用发光二极管组成,分红黄绿三种颜色。
该系统用于控制信号灯的输出线路有六条,按钮输出线有三条,应用AT89C51的P2.7,P3口来实现上述连接。
3个按钮一端通过上拉电阻连接到电源,并输入单片机,另一端接地,这样未按下时,输入是高电平,反之,为低电平。
采用软件消抖。
3. LED显示电路用LED显示器共有4位,需8位输出口用于位选输出,分别选用AT89C51的P1,P2口,驱动电路采用芯片7407驱动器。
四.软件设计本系统的软件包括主程序,显示程序和定时器溢出中断程序三部分。
1. 主程序:设置堆栈,定时器初始化,中断系统初始化,显示缓冲区赋初值,设置状态标志,状态切换。
题目:智能交通灯控制系统班级:p09电气四班姓名:刘强0903110429一、任务:设计并制作一个城市交道口交通灯控制糸统二、要求:根据下图交道口模型,装上交通灯。
交道口模型如图所示。
交通灯控制规则如下:1)每个街口有左拐、右拐、直行及行人四种指示灯。
每个灯有红、绿两种颜色。
自行车与汽车共用左拐、右拐和直行灯。
2)共有四种通行方式:①车辆南北直行、各路右拐,南北向行人通行。
南北向通行时间为1分钟,各路右拐比直行滞后10秒钟开放。
②南北向左拐、各路右拐,行人禁行。
通行时间为1分钟。
③东西向直行、各路右拐,东西向行人通行。
东西向通行时间为1分钟,各路右拐比直行滞后10秒钟开放。
④东西向左拐、各路右拐。
行人禁行。
通行时间为1分钟。
3)在通行结束前10秒钟,绿灯闪烁直至结束。
1, 基本部分:按照上述控制要求,用发光二极管代替交通灯,用PROTEUS绘制电路图,并仿真调试实现之。
2, 发挥部分:1.有倒计时时间显示。
2若交道口出现紧急情况,交警可将糸统设置成手动:全路口车辆禁行、行人通行。
紧急情况结束后再转成自动状态。
3当有119、120等特种车辆通过时,糸统自动转为特种车放行,其它车辆禁止状态。
特种车辆通过15秒钟后,糸统自动恢复,用模型车演示。
4其它自选措施。
智能交通灯控制系统1.系统功能的确定功能一:可以实现红绿灯的转换以及控制路口的基本功能。
功能二:有倒计时功能和最后十秒绿灯闪烁的功能。
功能三:出现紧急情况时,警察可以手动控制特殊状态,并维持交通。
功能四:119或120等特种车经过时,可转换成为特种车道行驶状态,并在情况消除后15秒,恢复原状。
2.方案论证2.1方案一:如下图所示,为proteus仿真图。
其中,P1,P0端口的8位分别来控制东西,南北方向的红绿灯。
且运用了4个74LS164的8位移位寄存器(串行输入,并行输出)来控制4个LED的数码显示,通过AT89C51单片机的P3.0,P3.1两个扩展端口来接4个并行连接的74LS164的DIN和CLK两个端口来显示倒计时的功能,这会产生乱码使得显示杂乱,而主程序以顺序执行为主,其中穿插着对P3.7的端口高低电平的测试和跳转语句来实现功能三,并且功能一、二在主程序中实现,没有功能四的的实现程序。
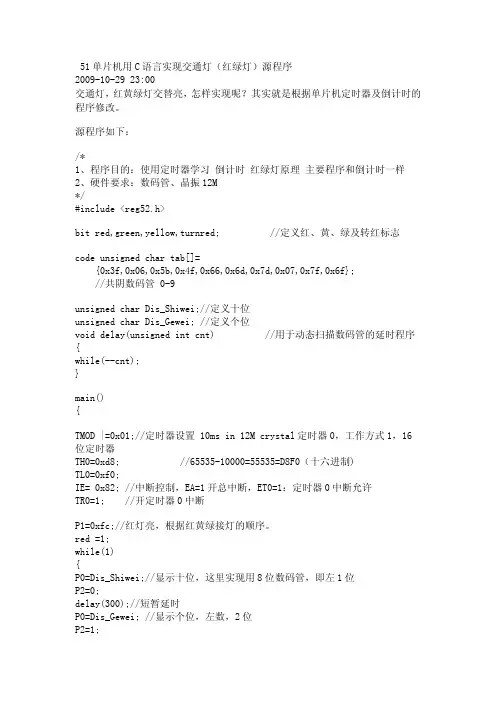
单片机红绿灯程序完整版交通灯设计交通灯设计方案:1:实现东西路----南北路红绿灯的交通指示。
2:东西路灯变化----南北路灯变化----3:红灯延时时间---25S绿灯延时时间---20S黄灯延时时间—3S4: 数码管显示:红灯---前20S不显示,只在最后5S开始倒计时显示。
绿灯---前15S不显示,只在最后5S开始倒计时显示。
黄灯---3S倒计时显示(若东西路为黄灯,南北路为红灯,那么南北绿的数码管也显示3S)。
5:交通应急事件处理:利用中断分别实现东西路---南北路的交通应急事件处理。
6:延时程序的使用:用循环延时和定时器计时的方法。
注:P1.0---北路绿灯,P1.1--北路黄灯,P1.2---北路红灯。
P1.3--东路绿灯,P1.4---东路黄灯,P1.5----东路红灯。
【交通灯流程图】延时20 53延时2553程序如下:ORG 0000HLJMP LOOPORG 000BH ;定时器0中断,实现交通应急事件LJMP WZD0 ORG 0013H ;外部中断1,实现交通应急事件LJMP WZD1 ORG 0030HLOOP:MOV R3,#5MOV R4,#5MOV R2,#20MOV SP,#70HMOV IE,#85HMOV TMOD,#01H ;置T0为工作方式1MOV TH0,#3CH ;置T0定时初值50msMOV TL0,#0B0HCLR TF0SETB TR0 ;启动定时器T0SETB P1.1 ;东---红灯亮,北---绿灯亮SETB P1.2CLR P1.0SETB P1.3SETB P1.4CLR P1.5ACALL DEL30SACALL YELLOW1 ;北---绿灯转黄灯,东---红灯亮ACALL DEL3S ;延时后北---黄灯灭SETB P1.0 ;东:红灯灭,绿灯亮,北:黄灯灭,红灯亮。
SETB P1.1 CLR P1.3CLR P1.2SETB P1.4SETB P1.5ACALL DEL55S ;北---红灯不变,东---绿灯转黄灯ACALL YELLOW2ACALL DEL3SSJMP LOOPYELLOW1: ;北---绿灯转黄灯,东---红灯不变SETB P1.0SETB P1.2CLR P1.1SETB P1.3CLR P1.5SETB P1.4RETYELLOW2: ;东---绿灯转黄灯,北---红灯不变SETB P1.0SETB P1.1CLR P1.2SETB P1.3SETB P1.5CLR P1.4RETWZD0: ;实现南北路交通应急事件CLR P1.0 ; (南北路保持畅通,东西路停止通行)SETB P1.1SETB P1.2SETB P1.3SETB P1.4CLR P1.5JNB P3.2,WZD0RETIWZD1: ;实现东西路交通应急事件CLR P1.3 ; (东西路保持畅通,南北路停止通行)CLR P1.2SETB P1.1SETB P1.0SETB P1.4SETB P1.5JNB P3.3,WZD1RETIDEL30S: ;红绿灯延时DEL25S:JNB TF0,DEL25S ;查询50ms到否CLR TF0MOV TH0,#3CH ;恢复T0定时初值50ms MOV TL0,#0B0HDJNZ R2,DEL25S ;判断1s到否?未到继续状态1 MOV R2,#20 ;置50ms计数初值DJNZ R4,DEL25S ;状态1维持25sDEL5S: ;取数延时MOV R2,#6DEL5:MOV A,R2ACALL ST ;取数MOV P0,A ;实现数码管显示ACALL DEL1S ;每隔1S减1DJNZ R2,DEL5RETDEL3S:MOV R2,#4HDEL3:MOV A,R2ACALL ST ;取数MOV P2,AMOV P0,A ;数码管显示ACALL DEL1SDJNZ R2,DEL3RETDEL55S:ACALL DEL20SMOV R2,#6 ;倒计时5S DEL55:ACALL DEL1SMOV A,R2ACALL STMOV P2,A ;数码管显示DJNZ R2,DEL55RETDEL1S: ;1S延时子程序MOV R5,#0BHST1:MOV R6,#0DAHST2:MOV R7,#0CFHDJNZ R7,$DJNZ R6,ST2DJNZ R5,ST1RETDEL20S: ;20S延时子程序MOV R5,#0BH;#0DCH ST3:MOV R6,#0DAHST4:MOV R7,#0CFHDJNZ R7,$DJNZ R6,ST4DJNZ R5,ST3RETST: ;取数MOV DPTR,#TABMOVC A,@A+DPTRRETTAB:DB 0FFH,0FFH,0F9H,0A4H,0B0H,99H,92H End。
单片机红绿灯程序完整版2篇第一篇:单片机红绿灯程序完整版(上)单片机红绿灯是一个经典的实验案例,它展示了单片机在控制和管理车辆行驶过程中的应用。
通过编写程序,我们可以模拟交通信号灯的运行,实现流畅和安全的交通流。
在这篇文章中,我将详细介绍单片机红绿灯程序的完整版,并向读者提供逐步实现该程序的指南。
我将从前期准备开始,包括所需材料和工具的概述,然后进入程序编写和单片机烧录的具体步骤。
最后,我将展示运行红绿灯程序的效果。
首先,让我们看一下所需的材料和工具。
为了完成这个项目,你将需要一块单片机开发板(如Arduino Uno),几个LED灯(红色、黄色和绿色),杜邦线,以及一台电脑。
需要特别注意的是,开发板和电脑之间需要通过USB线连接,以便将程序烧录到开发板中。
在准备好所有材料后,我们可以开始编写红绿灯程序。
我们将使用C语言来编写程序,并使用Arduino IDE作为代码编辑器。
首先,打开IDE并创建一个新的工程。
然后在代码编辑窗口中输入相关代码。
程序的主要逻辑是模拟交通信号灯的运行。
我们将交替点亮红、黄、绿三个LED灯,并设置不同的时间间隔来模拟红绿灯的变化。
例如,可以将红灯亮5秒钟,黄灯亮2秒钟,绿灯亮5秒钟。
然后,程序将循环执行这个过程,以实现连续的红绿灯变化。
在编写完程序后,我们需要将其烧录到单片机开发板中。
首先,通过USB线将开发板与电脑连接。
然后,在IDE中选择正确的开发板和端口,并点击“上传”按钮。
IDE将自动编译和烧录程序到开发板中。
一旦程序烧录完成,我们可以断开USB线,将开发板连接到电源,然后观察红绿灯的变化。
通过实验,我们可以看到红绿灯不断地在变化。
这个程序模拟了真实的交通信号灯,给我们提供了一个清晰的视觉指示,用于控制和管理车辆的行驶过程。
这个实验不仅展示了单片机的应用能力,还培养了我们对交通规则和安全的意识。
在红色、黄色和绿色的灯光交替运行中,我们可以思考如何实现更多的功能和效果。
交通灯的设计报告摘要:近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测技术日益更新。
在实时检测和自动控制的单片机应用系统中,单片机往往作为一个核心部件来使用,仅单片机方面知识是不够的,还应根据具体硬件结构软硬件结合,加以完善。
十字路口车辆穿梭,行人熙攘,车行车道,人行人道,有条不紊。
那么靠什么来实现这井然秩序呢?靠的就是交通信号灯的自动指挥系统。
交通信号灯控制方式很多。
本系统采用MSC-51系列单片机AT89C51和74LS47来设计交通灯控制器,实现了能根据实际车流量通过AT89C51芯片的P1口设置红、绿灯熄亮时间的功能;红绿灯循环点亮,绿灯熄灭时黄灯闪烁3秒(交通灯信号通过P1口输出,显示时间直接通过P0、P2口输出至二个对应的双位数码管)。
本系统实用性强、操作简单、扩展功能强。
关键词:单片机交通灯时间一、课题设计需要实现的系统功能:1.AB方向亮绿灯60s,然后黄灯闪烁3次,每次一秒(亮灭各40ms),红灯40s,同时CD方向红灯65s,绿灯35s,黄灯闪烁3s2.各路灯用LED模拟显示,同时用七段数码管显示两路的倒计时时间3.利用键盘可修改灯亮时间4.PC机设置灯亮时间,利用PC与单片机串口通信实现二、单片机概述单片机微型计算机是微型计算机的一个重要分支,也是颇具生命力的机种。
单片机微型计算机简称单片机,特别适用于控制领域,故又称为微控制器。
通常,单片机由单块集成电路芯片构成,内部包含有计算机的基本功能部件:中央处理器、存储器和I/O接口电路等。
因此,单片机只需要和适当的软件及外部设备相结合,便可成为一个单片机控制系统。
单片机经过1、2、3、3代的发展,目前单片机正朝着高性能和多品种方向发展,它们的CPU功能在增强,内部资源在增多,引角的多功能化,以及低电压底功耗。
三、芯片简介3.1、AT89C51芯片简介AT89C51单片机内部结构AT89C51单片机包含中央处理器、程序存储器(ROM)、数据存储器(RAM)、定时/计数器、并行接口、串行接口和中断系统等几大单元及数据总线、地址总线和控制总线等三大总线。
单片机红绿灯的汇编语言程序设计a>程序源代码ORG 0000H ;主程序的入口地址LJMP MAIN ;跳转到主程序的开始处ORG 0003H ;外部中断0的中断程序入口地址ORG 000BH ;定时器0的中断程序入口地址LJMP T0_INT ;跳转到中断服务程序处ORG 0013H ;外部中断1的中断程序入口地址MAIN : MOV SP,#50HMOV IE,#8EH ;CPU开中断,允许T0中断,T1中断和外部中断1中断MOV TMOD,#51H ;设置T1为计数方式,T0为定时方式,且都工作于模式1MOV TH1,#00H ;T1计数器清零MOV TL1,#00HSETB TR1 ;启动T1计时器SETB EX1 ;允许INT1中断SETB IT1 ;选择边沿触发方式MOV DPTR ,#0003HMOV A, #80H ;给8255赋初值,8255工作于方式0MOVX @DPTR, AAGAIN: JB P3.1,N0 ;判断是否要设定东西方向红绿灯时间的初值,若P3.1为1 则跳转MOV A,P1JB P1.7,RED ;判断P1.7是否为1,若为1则设定红灯时间,否则设定绿灯时间MOV R0,#00H ;R0清零MOV R0,A ;存入东西方向绿灯初始时间MOV R3,ALCALL DISP1LCALL DELAYAJMP AGAINRED: MOV A,P1ANL A,#7FH 1.7置0MOV R7,#00H ;R7清零MOV R7,A ;存入东西方向红灯初始时间MOV R3,ALCALL DISP1LCALL DELAYAJMP AGAIN;-------------------------------------------N0: SETB TR0 ;启动T0计时器MOV 76H,R7 ;红灯时间存入76HN00: MOV A,76H ;东西方向禁止,南北方向通行MOV R3,AMOV DPTR,#0000H ;置8255A口,东西方向红灯亮,南北方向绿灯亮MOV A,#0DDHMOVX @DPTR, AN01: JB P2.0,B0N02: SETB P3.0CJNE R3,#00H,N01 ;比较R3中的值是否为0,不为0转到当前指令处执行;------黄灯闪烁5秒程序------N1: SETB P3.0MOV R3,#05HMOV DPTR,#0000H ;置8255A口,东西,南北方向黄灯亮MOV A,#0D4HMOVX @DPTR,AN11: MOV R4,#00HN12: CJNE R4,#7DH,$ ;黄灯持续亮0.5秒N13: MOV DPTR,#0000H ; 置8255A口,南北方向黄灯灭MOV A,#0DDHMOVX @DPTR,AN14: MOV R4,#00HCJNE R4,#7DH,$ ;黄灯持续灭0.5秒CJNE R3,#00H,N1 ;闪烁时间达5秒则退出;------------------------------------------------------------N2: MOV R7,#00HMOV A,R0 ;东西通行,南北禁止MOV R3,AMOV DPTR,#0000H ; 置8255A口,东西方向绿灯亮,南北方向红灯亮MOV A,#0EBHMOVX @DPTR,AN21: JB P2.0,T03N22: CJNE R3,#00H,N21;------黄灯闪烁5秒程序------N3: MOV R3,#05HMOV DPTR,#0000H ;置8255A口,东西,南北方向黄灯亮MOV A,#0E2HMOVX @DPTR,AN31: MOV R4,#00HCJNE R4,#7DH,$ ;黄灯持续亮0.5秒N32: MOV DPTR,#0000H ; 置8255A口,南北方向黄灯灭MOV A,#0EBHMOVX @DPTR,AN33: MOV R4,#00HCJNE R4,#7DH,$ ;黄灯持续灭0.5秒CJNE R3,#00H,N3 ;闪烁时间达5秒则退出SJMP N00;------闯红灯报警程序------B0: MOV R2,#03H ;报警持续时间3秒B01: MOV A,R3JZ N1 ;若倒计时完毕,不再报警CLR P3.0 ;报警CJNE R2,#00H,B01 ;判断3秒是否结束SJMP N02;------1秒延时子程序-------N7: RETIT0_INT:MOV TL0,#9AH ;给定时器T0送定时10ms的初值MOV TH0,#0F1HINC R4INC R5CJNE R5,#0FAH,T01 ;判断延时是否够一秒,不够则调用显示子程序MOV R5,#00H ;R5清零DEC R3 ;倒计时初值减一DEC R2 ;报警初值减一T01: ACALL DISP ;调用显示子程序RETI ;中断返回;------显示子程序------DISP: JNB P2.4,T02DISP1: MOV B,#0AHMOV A,R3 ;R3中值二转十显示转换DIV ABMOV 79H,AMOV 7AH,BDIS: MOV A,79H ;显示十位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0F7HMOVX @DPTR,ALCALL DELAYDS2: MOV A,7AH ;显示个位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0FBHMOVX @DPTR,ARET;------东西方向车流量检测程序------T03: MOV A,R3SUBB A,#00H ;若绿灯倒计时完毕,不再检测车流量JZ N3JB P2.0,T03INC R7CJNE R7,#64H,E1MOV R7,#00H ;中断到100次则清零E1: SJMP N22;------东西方向车流量显示程序------T02: MOV B,#0AHMOV A,R7 ;R7中值二转十显示转换DIV ABMOV 79H,AMOV 7AH,BDIS3: MOV A,79H ;显示十位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0F7HMOVX @DPTR,ALCALL DELAYDS4: MOV A,7AH ;显示个位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0FBHMOVX @DPTR,ALJMP N7;------延时4MS子程序----------DELAY: MOV R1,#0AHLOOP: MOV R6,#64HNOPLOOP1: DJNZ R6,LOOP1DJNZ R1,LOOPRET;------字符表------TAB: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH ENDORG 0000HAJMP MAINORG 000BHLJMP INTORG 0030HMAIN:MOV R2,#20H MOV TMOD,#01H MOV TL0,#0B0H MOV TH0,#80H SETB EASETB ET0SETB TR0LOOP:MOV A,#01H MOV P1,ALCALL DELMOV R0,#02H LCALL FPLOOP1:MOV A,#02H MOV P1,ALCALL DELMOV R0,#02H LCALL FPLOOP2:MOV A, #04H MOV P1,ALCALL DELMOV R0,#05H LCALL FPMOV P1,#00H LCALL DELCJNE R0,#00H ,AASJMP LOOPFP:MOV R1,#80H MOV A,R1MOV DPTR,#3FFFH MOVX @DPTR,A RR AMOV A,R0ANL A,#0FHMOV DPTR,#TAB MOVC A,@A+DPTR MOV DPTR,#5FFFH MOVX @DPTR,A LCALL DELMOV A,#0FFHMOV DPTR,#5FFFH MOVX @DPTR,AMOV A,R1MOV DPTR,#3FFFH MOVX @DPTR,AMOV A,R0ANL A,#0F0HSWAP AMOV DPTR,#TAB MOVC A,@A+DPTR MOV DPTR,#5FFFH MOVX @DPTR,A LCALL DELMOV A,#0FFHMOV DPTR,#5FFFH MOVX @DPTR,ACJNE R0,#99H,FPRETDEL:MOV R5,#100H DEL0:MOV R6,#250H DEL1JNZ R6,DEL1 DJNZ R5,DEL0RETINT: CLR ET0DJNZ R2,GOONMOV A,R0ADD A,#99HDA AMOV R0,AMOV R2,#20HGOON:MOV TMOD,#01H MOV TL0,#0B0HMOV TH0,#80HSETB EASETB ET0RETITAB: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H END。
实验报告学生姓名:学号:指导教师:实验地点:实验时间:2018年4月2日实验红绿灯显示实验一、实验目的:1.掌握程序控制指令。
2.掌握分支程序、子程序、循环程序的编写方法。
3.掌握软件延时的方法、了解机器周期和指令周期的概念。
4.了解“静态显示”的含义。
二、实验内容:在显示实验的基础上,如果将第7位,第3位,第1位分别看成红灯、黄灯和绿灯,红灯5秒(对应位显示0)后,显示黄灯1秒(对应位显示0),再显示绿灯3秒,编写对应程序,程序要求,延时使用子程序,最好使用标志位。
其它内容见显示实验三、实验步骤:1.程序清单:a):#include<>typedef unsigned char u8;typedef unsigned int u16;#define Dpy P0sbit LSA = P2^2;sbit LSB = P2^3;sbit LSC = P2^4;u8 code array[17] = {0x3f, 0x06, 0x5b, 0x4f,0x66, 0x6d, 0x7d, 0x07,0x7f, 0x6f, 0x77, 0x7c,0x39, 0x5e, 0x79, 0x71,0x00};void ls(u8 c, u8 b, u8 a){L SA = a;L SB = b;L SC = c;}void delay(u16 i){w hile(i>0) i--;}void Dpy1Display(u8 i){l s(1,1,1);D py = array[i];d elay(100);D py = 0x00;}void Dpy2Display(u8 i){l s(1,1,0);D py = array[i];d elay(100);D py = 0x00;}void Dpy3Display(u8 i){l s(1,0,1);D py = array[i];d elay(100);D py = 0x00;}void Dpy4Display(u8 i){l s(1,0,0);D py = array[i];d elay(100);D py = 0x00;}void Dpy5Display(u8 i){l s(0,1,1);D py = array[i];d elay(100);D py = 0x00;}void Dpy6Display(u8 i){l s(0,1,0);D py = array[i];d elay(100);D py = 0x00;}void Dpy7Display(u8 i){l s(0,0,1);D py = array[i];d elay(100);D py = 0x00;}void Dpy8Display(u8 i){l s(0,0,0);D py = array[i];d elay(100);D py = 0x00;}void DpyDisplay(u8 a, u8 b, u8 c, u8 d, u8 e, u8 f, u8 g, u8 h){D py1Display(a);D py2Display(b);D py3Display(c);D py4Display(d);D py5Display(e);D py6Display(f);D py7Display(g);D py8Display(h);}b):#include<>typedef unsigned char u8;typedef unsigned int u16;extern void DpyDisplay(u8 a, u8 b, u8 c, u8 d, u8 e, u8 f, u8 g, u8 h); void main(){u16 i, j, n;n = 108;w hile(1){for(j=10;j>0;j--){for (i=0; i<n; i++)DpyDisplay(j-1,16,16,16,16,16,16,16);}for(j=2;j>0;j--){for (i=0; i<n; i++)DpyDisplay(16,16,j-1,16,16,16,16,16);}for(j=5;j>0;j--){for (i=0; i<n; i++)DpyDisplay(16,16,16,16,j-1,16,16,16);}}}2.实验现象:开发板数码管第一位从9逐秒递减至0后,第三位从1逐秒递减至0,之后第五位从4逐秒递减至0。
单片机课程设计基于单片机的交通灯设计2007.07.05 一.设计目的:1、通过交通信号灯控制系统的设计,掌握8255A并行口传输数据的方法,以控制发光二极管的亮与灭;2、用8255作为输出口,控制十二个发光二极管熄灭,模拟交通灯管理.3、通过单片机课程设计,熟练掌握汇编语言的编程方法,将理论联系到实践中去,提高我们的动脑和动手的能力;4、完成控制系统的硬件设计、软件设计、仿真调试。
二.设计要求:交通信号灯模拟控制系统设计利用单片机的定时器定时,令十字路口的红绿灯交替点亮和熄灭,并且用LED数码管显示时间。
用8051做输出口,控制十二个发光二极管燃灭,模拟交通灯管理。
在一个交通十字路口有一条主干道(东西方向),一条从干道(南北方向),主干道的通行时间比从干道通行时间长,四个路口安装红,黄,蓝,灯各一盏;1、设计一个十字路口的交通灯控制电路,要求南北方向(主干道)车道和东西方向(支干道)车道两条交叉道路上的车辆交替运行,时间可设置修改。
2、在绿灯转为红灯时,要求黄灯先亮,才能变换运行车道3、黄灯亮时,要求每秒闪亮一次。
4、东西方向、南北方向车道除了有红、黄、绿灯指示外,每一种灯亮的时间都用显示器进行显示(采用计时的方法)。
5、同步设置人行横道红、绿灯指示。
三.设计任务和内容:任务:设计一个能够控制十二盏交通信号灯的模拟系统。
并且要求交通信号灯按照交通规则的模试来运行。
内容:因为本课程设计是交通灯的控制设计,所以要了解实际交通灯的变化情况和规律。
假设一个十字路口为东西南北走向。
初始状态0为东西红灯,南北红灯。
然后转状态1东西红灯,南北绿灯通车,。
过一段时间转状态2南北绿灯灭,黄灯闪烁几次,东西仍然红灯。
再转状态3,东西绿灯通车,南北红灯。
过一段时间转状态4,东西绿灯灭,闪几次黄灯,南北仍然红灯。
最后循环至状态1。
四.控制系统的总体要求:1.执行程序时,初始态为四个路口的红灯全亮之后;2.东西路口的绿灯亮,南北路口的红灯亮,东西路口方向通车;3.延时一段时间后,东西路口的绿灯熄灭,黄灯开始延时并且开始闪烁,闪烁5次后,东西路口红灯亮,而同时南北路口的绿灯亮,南北路口方向开始通车;4.延时一段时间之后,南北路口的绿灯熄灭,黄灯开始延时并且开始闪烁,闪烁3次之后,再切换到东西路口方向;之后重复2到4过程。
/****************************************************************************** ** 描述: ** A T89S52液晶演示数据p0,控制p2** 功能:** 万年历、频率计、密码锁、点阵屏** 作者:** 哥不在江湖~~** 技术支持:** 湖南工学院************************************************************************************************ */;****************************************************************************** *****************;;系统起始程序区ORG 0000HSTART: LJMP MAINORG 000BHLJMP TIMEORG 001BHLJMP TIME2;****************************************************************************** *****************;;系统监控程序区ORG 0030HMAIN: MOV SP, #80H ;确立堆栈区MOV PSW, #00H ;MOV TMOD, #01H ;定时器初始化,定时器0以工作方式1工作CLR F0 ;判断表格首地址标志位CLR EAMOV R0, #20H ;RAM区首地址MOV R7, #96 ;RAM区单元个数ML: MOV @R0, #00HINC R0DJNZ R7, MLTSF: MOV DPTR, #DISBH ;系统初始化后提示符“P.”字符代码表首地址MOV R5, #08HMOV R0, #78HDISPTSF:CLR AMOVC A, @A+DPTRMOV @R0, AINC R0INC DPTRDJNZ R5, DISPTSFFUN: ACALL DISP ;调显示子程序显示提示符“P.”ACALL KEY ;调用键扫描程序JB 20H.0, JT ;S2键按下,则执行交通灯的程序JB 20H.1, SZAJ2 ;S3键按下,则执行数字按键的程序LJMP FUNSZAJ2: LJMP SZAJ;****************************************************************************** *****************;;交通灯程序入口JT: MOV IE, #82H ;定时器0初始化MOV TMOD, #01H ;(1秒钟定时)MOV TH0, #3CHMOV TL0, #0B0HMOV R4, #20CLR 21H.0CLR TR1CLR TR0;****************************************************************************** *****************;ONE: MOV R3, #15 ;第一个状态,主绿次红MOV P3, #0DEH ;灯亮,R3为秒计数;****************************************************************************** *****************;TSF1: MOV DPTR, #DISBHMOV R5, #08HMOV R0, #78HDISPTSF1:CLR A ;数码管显示缓存区扫描MOVC A, @A+DPTRMOV @R0, AINC R0INC DPTRDJNZ R5, DISPTSF1MOV 78H, #05H ;数码管显示缓存区付初值MOV 79H, #01H ;主绿次红,初值15SETB TR0 ;开定时;****************************************************************************** *****************;HA1: ACALL DISPJNB 21H.0, HUI1CLR 21H.0 ;15秒倒计时程序DJNZ 78H, HUIQU1MOV R6, 79HCJNE R6, #00H, TENLJMP HUIQU1TEN: ACALL DISPJNB 21H.0, TENMOV 78H, #09HMOV 79H, #00HDEC R3CLR 21H.0LJMP HUIQU1HUI1: LJMP HA1HUIQU1: DJNZ R3, HA1;***********************************************************************************************;CLR TR0 ;第二个状态,主黄次红;****************************************************************************** *****************;TWOTWO: MOV IE, #88H ;定时器1初始化MOV TMOD, #10H ;(0.5秒定时器)MOV TH1, #3CHMOV TL1, #0B0HMOV R4, #10;****************************************************************************** *****************;TWO: MOV R3, #5 ;R3还是秒计数MOV P3, #0DDH ;灯亮;****************************************************************************** *****************;TSF2: MOV DPTR, #DISBHMOV R5, #08HMOV R0, #78H ;数码管显示缓存区扫描DISPTSF2:CLR AMOVC A, @A+DPTRMOV @R0, AINC R0INC DPTRDJNZ R5, DISPTSF2 ;数码管显示缓存区付初值MOV 78H, #05H ;主黄次红,初值05MOV 79H, #00H;***************************************************************************** ******************;CLR 22H.0SETB TR1 ;开定时器1MOV R7, #00HHA2: ACALL DISPJNB 22H.0, HA2 ;执行两次0.5秒定时,则计1秒INC R7CLR 22H.0CJNE R7, #02H, HA2DEC 78HMOV R7, #00H;****************************************************************************** *****************;CJNE R3, #4, HUIQU2 ;当倒计时剩下3秒时,执行主行道黄灯闪烁的程序;****************************************************************************** *****************;SHAN21: CLR 22H.0LIANG2: JB 22H.0, SHAN22MOV P3, #0DFH ;主行道闪烁程序ACALL DISPLJMP LIANG2SHAN22: CLR 22H.0MIE2: JB 22H.0, SHAN2MOV P3, #0DDHACALL DISPLJMP MIE2SHAN2: DEC 78HDEC R3CJNE R3, #1, SHAN21LJMP TIAO2HUIQU2: DJNZ R3, HA2HUI2: LJMP HA2TIAO2: NOP;****************************************************************************** *****************;CLR TR1 ;第三个状态,主红次绿CLR TR0 ;定时器的选择SANSAN: MOV IE, #82HMOV TMOD, #01HMOV TH0, #3CHMOV TL0, #0B0HMOV R4, #20;****************************************************************************** *****************;SAN: MOV R3, #5MOV P3, #0F3H;****************************************************************************** *****************;TSF3: MOV DPTR, #DISBHMOV R5, #08HMOV R0, #78HDISPTSF3:CLR AMOVC A, @A+DPTRMOV @R0, AINC DPTRDJNZ R5, DISPTSF3MOV 78H, #05HMOV 79H, #00H;****************************************************************************** *****************;SETB TR0 ;开定时HA3: ACALL DISPJNB 21H.0, HA3 ;5秒倒计时程序CLR 21H.0DEC 78HDJNZ R3, HA3;****************************************************************************** *****************;CLR TR0 ;选择定时器1,即0.5秒定时器SISI: MOV IE, #88HMOV TMOD, #10HMOV TH1, #3CHMOV TL1, #0B0HMOV R4, #10;****************************************************************************** *****************;SI: MOV R3, #5MOV P3, #0EBHTSF4: MOV DPTR, #DISBHMOV R5, #08HMOV R0, #78HDISPTSF4:CLR AMOVC A, @A+DPTRMOV @R0, AINC R0INC DPTRDJNZ R5, DISPTSF4MOV 78H, #05HMOV 79H, #00HCLR 22H.0SETB TR1HA4: ACALL DISPJNB 22H.0, HA4INC R7CLR 22H.0CJNE R7, #02H, HA4MOV R7, #00H;***************************************************************************** ******************;CJNE R3, #4, HUIQU4;***************************************************************************** ******************;SHAN41: CLR 22H.0LIANG4: JB 22H.0, SHAN42MOV P3, #0FBHACALL DISPLJMP LIANG4SHAN42: CLR 22H.0MIE4: JB 22H.0, SHAN4MOV P3, #0EBHACALL DISPLJMP MIE4SHAN4: DEC 78HDEC R3CJNE R3, #1, SHAN41LJMP TIAO4HUIQU4: DJNZ R3, HA4HUI4: LJMP HA4TIAO4: NOPLJMP JT;****************************************************************************** *****************;SZAJ: MOV P3, #0FFH ;数据初始化MOV 78H, #10HMOV 79H, #10HMOV 7AH, #10HMOV 7BH, #10HMOV 7CH, #10HMOV 7DH, #10HMOV 7EH, #10HMOV 7FH, #10HXS: ACALL DISPACALL KEYJB 20H.0, KEY00 ;是S2键,转KEY00执行JB 20H.1, KEY11 ;是S3键,转KEY11执行JB 20H.2, KEY22 ;是S4键,转KEY22执行JB 20H.3, KEY33 ;是S5键,转KEY33执行JB 20H.4, KEY44 ;是S6键,转KEY44执行JB 20H.5, KEY55 ;是S7键,转KEY55执行JB 20H.6, KEY66 ;是S8键,转KEY66执行JB 20H.7, KEY77 ;是S9键,转KEY77执行LJMP OUTKEY00: LCALL JIAOHUANMOV 7FH, #00HLCALL DISPLJMP OUTKEY11: LCALL JIAOHUANMOV 7FH, #01HLCALL DISPLJMP OUTKEY22: LCALL JIAOHUANMOV 7FH, #02HLCALL DISPLJMP OUTKEY33: LCALL JIAOHUANMOV 7FH, #03HLCALL DISPLJMP OUTKEY44: LCALL JIAOHUANMOV 7FH, #04HLCALL DISPLJMP OUTKEY55: LCALL JIAOHUANMOV 7FH, #05HLCALL DISPLJMP OUTKEY66: LCALL JIAOHUANMOV 7FH, #06HLCALL DISPLJMP OUTKEY77: LCALL JIAOHUANMOV 7FH, #07HLCALL DISPOUT: LJMP XSTIME: MOV TH0, #3CHMOV TL0, #0B0HDEC R4CJNE R4, #0, ZHUANSETB 21H.0MOV R4, #20ZHUAN: RETITIME2: MOV TH1, #3CHMOV TL1, #0B0HDEC R4CJNE R4, #0, ZHUAN2SETB 22H.0MOV R4, #10ZHUAN2: RETIDISBH: DB 11H,10H,10H,10H,10H,10H,10H,10H,10H ;提示符“P.”字符序号;显示字符段选码表(共阳极代码)TAB: DB 0C0H, 0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H ;0-8DB 90H, 88H,83H,0C6H,0A1H,86H,8EH,0FFH,0CH ;9,A,B,C,D,E,F,灭,p.;****************************************************************************** ********;;键扫描子程序KEY: LCALL KEYCHULI ;调P1口数据处理子程序JZ EXIT ;没有键按下,转返回LCALL DISP ;调显示子程序去抖动LCALL DISPLCALL KEYCHULI ;调P1口数据处理子程序JZ EXIT ;没有键按下,转返回MOV B, 20H ;保存取反后的键值KEYSF: LCALL KEYCHULI ;调P1口数据处理子程序JZ KEY1 ;键释放,则将键值转移并保存LCALL DISP ;调显示子程序延时LJMP KEYSF ;等待释放KEY1: MOV 20H, B ;键值送20H保存EXIT: RET ;子程序返回;P1口按键数据处理子程序KEYCHULI: PUSH PSW ;保护现场CLR RS1 ;改变当前寄存器组为组1SETB RS0MOV P1, #0FFH ;先向P1口写1MOV A, P1 ;读P1口数据CPL A ;P1口数据取反MOV 20H, A;保存取反后的键值CLR RS1 ;恢复当前寄存器组为组0CLR RS0POP PSW ;恢复现场RET ;子程序返回;数码管显示子程序DISP;入口:7FH,7EH,7DH,7CH,7BH,7AH,79H,78H (LED7,LED6,LED5,LED4,LED3,LED2,LED1,LED0)DISP: PUSH DPHPUSH DPLPUSH ACCPUSH PSWCLR RS1 ;改变当前寄存器组为组1SETB RS0MOV R1, #78H ;显示缓冲存储单元首地址MOV R2, #0FEH ;从右至左显示MOV R5, #08H ;循环次数,即驱动数码管的位数DISP1: MOV A, @R1MOV DPTR, #TABMOVC A, @A+DPTRMOV P0, A ;送段控MOV P2, R2 ;送位控LCALL DLMOV A, R2 ;延时1毫秒RL A ;获得新的位控码MOV R2, A ;保存新的位控码INC R1 ;获得新的显示缓冲单元地址DJNZ R5, DISP1 ;循环没有结束则继续DISP2: POP PSW ;恢复当前寄存器组的组号POP ACCPOP DPLPOP DPHRET;延时1ms子程序(晶振频率12MHz)DLDL: MOV R7, #02HDL1: MOV R6, #0FFHDL2: DJNZ R6, DL2DJNZ R7, DL1RET;将78至7EH单元的内容交换子程序JIAOHUAN:MOV 78H, 79HMOV 79H, 7AHMOV 7AH, 7BH MOV 7BH, 7CH MOV 7CH, 7DH MOV 7DH, 7EH MOV 7EH, 7FH RETEND。
单片机控制交通灯源程序:DISPLAY11 EQU 40H ; 东西显示码缓冲区1 DISPLAY12 EQU 41H ; 东西显示码缓冲区2 DISPLAY21 EQU 42H ;南北显示码缓冲区1 DISPLAY22 EQU 43H ;南北显示码缓冲区2 ORG 0000H SJMP MAIN ORG 0003H ;外部中断0入口入口LJMP PINT0 ORG 0013H ;外部中断1入口入口LJMP PINT1 MAIN:MOV SP,#60H ;设栈底;设栈底MOV IE,#85H ;外部中断0、外部中断1设置设置 S0:MOV R0,#20 MOV R1,#80 MOV P1,#21H ;点亮东西左转绿灯;点亮东西左转绿灯SETB P3.0 CLR P3.1 CLR P3.4 SETB P3.5 LP0:LCALL DISP LCALL DELAY DEC R0 DEC R1 CJNE R0,#6, LP0 ;R0﹥6,转LP0 MOV R3, #0 LP1:CPL P1.0 ;绿灯闪烁3次LCALL DISP LCALL DELAY1 INC R3 CJNE R3,#2, LP1 MOV R3, #0 DEC R0 DEC R1 CJNE R0,#3, LP1 ;R0﹥3,转LP1 S1:MOV P1,#22H ;点亮东西左转黄灯点亮东西左转黄灯LP2:LCALL DISP LCALL DELAY DEC R0 DEC R1 CJNE R0,#0, LP2 ;R0﹥0,转LP2 S2:MOV P1,#0CH ;点亮东西绿灯点亮东西绿灯MOV R0,#60 LP3:LCALL DISP LCALL DELAY DEC R0 DEC R1 CJNE R0,#6, LP3 ;R0﹥6,转LP3 MOV R3, #0 LP4:CPL P1.0 ;绿灯闪烁3次LCALL DISP LCALL DELAY1 INC R3 CJNE R3,#2, LP4 MOV R3, #0 DEC R0 DEC R1 CJNE R0,#3, LP4 ;R0﹥3,转LP4 S3:MOV P1,#14H ;点亮东西黄灯点亮东西黄灯LP5:LCALL DISP LCALL DELAY DEC R0 DEC R1 CJNE R0,#0, LP5 ;R0﹥0,转LP5 S4:MOV R0,#60 MOV R1,#20 MOV P1,#64H ;点亮南北左转绿灯点亮南北左转绿灯CLR P3.0 CLR P3.1 CLR P3.4 SETB P3.5 LP10:LCALL DISP LCALL DELAY DEC R0 DEC R1 CJNE R1,#6, LP10 ;R1﹥6,转LP10 MOV R3, #0 LP11:CPL P1.6 ;绿灯闪烁3次LCALL DISP LCALL DELAY1 INC R3 CJNE R3,#2, LP11 MOV R3, #0 DEC R0 DEC R1 CJNE R1, #3, LP11 ;R1﹥3,转LP11 S5:MOV P1, #0A4H ;点亮南北左转黄灯点亮南北左转黄灯LP12:LCALL DISP LCALL DELAY DEC R0 DEC R1 CJNE R1, #0, LP12 ;R1﹥0,转LP12 S6:MOV P1, #24H ;点亮南北绿灯点亮南北绿灯SETB P3.0 SETB P3.1 CLR P3.4 CLR P3.5 MOV R1, #40 LP13:LCALL DISP LCALL DELAY DEC R0 DEC R1 CJNE R1,#6, LP13 ;R1﹥6,转LP13 MOV R3, #0 LP14:CPL P1.0 ;绿灯闪烁3次LCALL DISP LCALL DELAY1 INC R3 CJNE R3,#2, LP14 MOV R3, #0 DEC R0 DEC R1 CJNE R1,#3, LP14 ;R0﹥3,转LP14 S7:MOV P1, #24H ;点亮南北黄灯点亮南北黄灯SETB P3.0 CLR P3.1 SETB P3.4 CLR P3.5 LP15:LCALL DISP LCALL DELAY DEC R0 DEC R1 CJNE R1,#0, LP15 ;R0﹥0,转LP15 LJMP S0 DISP :MOV A,R0 ;东西时间显示(CD4511) MOV B,#1 0 DIV AB SW AP A MOV DISPLAY11, A MOV DISPLAY12, B ANL DISPLAY11, 0F0H ANL DISPLAY12, F0H MOV A, DISPLAY11 ORL A, DISPLAY12 MOV P0, A MOV A, R1 ;南北时间显示(CD4511) MOV B,#1 0 DIV AB SW AP A MOV DISPLAY21, A MOV DISPLAY22, B ANL DISPLAY21, 0F0H ANL DISPLAY22, F0H MOV A, DISPLAY21 ORL A, DISPLAY22 MOV P2, A RET DELA Y:MOV R5,#05H ;1S延时(6MH Z晶体)晶体)K1:MOV R6,# 200 K2:MOV R7,#248 NOP K3:DJNZ R7, K3 DJNZ R6, K2 DJNZ R5, K1 RET DELAY1:MOV R5, #05H ;0.5S延时延时K11:MOV R6, #100 K12:MOV R7, #248 NOP K13:DJNZ R7, K13 DJNZ R6, K12 DJNZ R5, K11 RET PINT0:PUSH 90H ;中断子0程序,紧急情况(东西通行),保存P1口原来状态口原来状态 PUSH B0H ;保存P3口原来状态口原来状态MOV P1,#0CH ;点亮东西绿灯点亮东西绿灯SETB P3.0 CLR P3.1 CLR P3.4 SETB P3.5 POP B0H POP 90H PINT1:PUSH 90H ;中断子1程序,紧急情况(南北通行),保存P1口原来状态口原来状态PUSH B0H ;保存P3口原来状态口原来状态 MOV P1, #24H ; 点亮南北绿灯点亮南北绿灯 SETB P3.0 SETB P3.1 CLR P3.4 CLR P3.5 POP B0H POP 90H RETI END S1 S2 S3 S4 S5 S6 S7 S8 S9 S10 S11 S12 P1= 21H P1= 2 P1= 2 P1= P1= P1= P1= P1= P1= P1= P1= P1= P3= 9FH P3= 9FH P3= 9FH P3= 9FH P3= 9FH P3= 9FH P3= 8FH P3= 8FH P3= 8FH P3= 3FH P3= P3= 5FH S1 S2 S3 S4 S5 S6 S7 S8 S9 S10 S11 S12 P1.0 1 闪0 0 0 0 0 0 0 0 0 0 P1.1 0 0 1 0 0 0 0 0 0 0 0 0 P1.2 0 0 0 1 1 1 1 1 1 1 1 1 P1.3 0 0 0 1 闪0 0 0 0 0 0 0 P1.4 0 0 0 0 0 1 0 0 0 0 0 0 P1.5 1 1 1 0 0 0 1 1 1 1 1 1 P1.6 0 0 0 0 0 0 1 闪0 0 0 0 P1.7 0 0 0 0 0 0 0 0 1 0 0 0 P3.4 1 1 1 1 1 1 0 0 0 1 1 1 P3.5 0 0 0 0 0 0 0 0 0 1 闪0 P3.6 0 0 0 0 0 0 0 0 0 0 0 1 P3.7 1 1 1 1 1 1 1 1 1 0 0 0 初始值:P1=21H P3=9FH 。
单片机红绿灯的设计实验报告一、实验目的1.了解单片机的基本功能与使用方法;2.学习使用Keil C51 编译器和Proteus仿真软件;3.掌握单片机编程语言C语言的基本语法和直接控制IO口的方法;4.通过设计红绿灯控制系统,加深对单片机的理解并培养自己的创新意识。
二、实验基本原理1.单片机的基本组成①微处理器是主要控制计算机系统工作的核心部件,包括指令寄存器、程序计数器、通用寄存器、测试和调试功能等。
②存储器存储程序和数据,常见的有ROM、EPROM、RAM等。
③输入输出端口把微处理器与外部器件相连,常见的有通用输入输出口I/O口、定时器/计数器、串行通信口等。
2.单片机的编程基础C语言是单片机编程最常用的编程语言之一,其基本语法与PC编程语言相同,但要了解单片机IO口的使用和编程方法。
3.红绿灯系统的设计本系统采用双向流量控制时相同步控制灯光,主要由四个模块组成:(1)计数器模块计数器模块是用来设置红绿灯系统时间的基本模块,通过定时器,定时器溢出时计数器加1,灯开始切换。
(2)红灯亮模块红灯亮模块是用来控制红灯亮起的模块,主要是通过配置P1.0口来实现,当P1.0输出1时亮红灯,P1.0输出0时灯灭。
(3)绿灯亮模块绿灯亮模块是用来控制绿灯亮起的模块,主要是通过配置P1.1口来实现,当P1.1输出1时亮绿灯,P1.1输出0时灯灭。
(4)黄灯亮模块黄灯亮模块是用来控制黄灯亮起的模块,主要是通过配置P1.2口来实现,当P1.2输出1时亮黄灯,P1.2输出0时灯灭。
三、实验步骤1. 确定系统方案,设计电路图;2. 编写程序代码;3. 进行仿真并调试代码;4. 进行实际验收,验收并记录实验结果。
四、实验步骤详解1.系统电路图设计本次实验采用晶振频率为12MHz的AT89S52单片机来控制红绿灯顺序切换。
其电路原理图如下所示:其中,SW1、SW2分别连接到P2.0、P2.1口,模拟车辆通过;LED1、LED2、LED3接到P1.0、P1.1、P1.2口,表示红灯、黄灯、绿灯。
一、实验名称:单片机设计交通灯二、实验目的1、巩固单片机基础,利用所学单片机知识编写程序。
2、掌握单片机的编程调试过程。
三、设计要求:1、A、B 两路各放行60S,并在数显管上显示各路通行标。
2、绿灯最后5S闪烁。
3、绿灯到红灯间有黄灯并闪4S。
4、在数显管上显示剩余时间。
四、硬件、软件的设计原理1、硬件设计图:见附页。
2、硬件设计说明:(1)、用单片机的P1口接6只二极管模拟交通灯,P1口先输入高电平熄灭星号灯,输出低电平点亮信号灯。
P1口线控制功能及相应控制码如表:(2)用单片机P0口皆数显管闲事剩余时间。
3、软件设计说明;(1)、软件设计思路1)、主程序主要采取调用子程序,由R7寄存器确定交通灯的各时间,并用它来做子减一坐到倒计时和各红灯的剩余时间是否到0,并用RS1中的R1控制A绿B红的倒计时5S时绿灯闪的状态,R4控制A黄灯闪的状态,R5控制A红B绿闪的状态,R6控制B黄灯闪的状态。
利用定时器查询方式定时1S。
2)、程序流程图:见附页五、程序及说明;见附页六、心得这个专周从刚开始的没头绪,到最后终于明白。
下面就是我在专周过程周遇到的一些困难的描述。
1.分析交通灯的状态的时候少了两种状态,导致最后的程序是红灯和黄灯后都有黄灯,最后在老师的提醒下,我又加了倒数5S时绿灯闪的状态。
2.硬件设计好后,开始编程。
3.编程时,我先画好大概的流程图,以致编程时不容易混乱。
4.编好程后就开始调试,通过不断的改程序,以致程序无误,调试过程中,开始的时候用中断定时,但最后数显闪得太快,经过反复的修改,最后定位定时器查询方式。
在此过程中,通过看书,反复改错,问同学、老师,终于完成了专周。
通过这次专周,我更进一步熟悉了单片机,也明白了如何去设计一个东西的思路,如何改错。
在以后的学习生活中我会更加努力,学更多的东西。
1 引言随着世界范围内城市化和机动化进程的加快,城市交通越来越成为一个全球化的问题。
在我国,随着经济实力的飞速发展,城市机动车量也随之增加,许多大中城市出现了交通超负荷运行的情况,道路超负荷承载的程度进一步加大,致使交通事故逐年增加,每年因交通事故死亡的人数占所有事故死亡总人数的比例逐年上升。
在一个交通十字路口,如果还是像以前一样由单纯的一种信号灯和交通警察的协调来维持交通是不够的。
所以这就需要一个更为合理和智能且成本不高的路口交通灯控制系统。
与此同时,随着科学技术的飞速发展,单片机的应用正在不断地走向深入,同时带动传统控制检测技术日新月异。
在实时检测和自动控制的单片机应用系统中,单片机往往是作为一个核心部件来使用,它可以嵌入到任何微型或小型仪器或设备中,同时结合具体的硬件结构进行相关的软件设计,来弥补单片机在某些方面的不足。
本次课程设计采用了一个MCS-51系列单片机和可编程并行I/O接口设计交通灯控制器的实现方法。
交通灯控制系统由AT89C51单片机、LED指示灯组成,实现了对交通的有效控制。
通过对交通灯智能控制,使交通得以有效管制,对于疏导交通流量、提高道路通行能力,减少交通事故有明显效果。
2 系统功能用单片机AT89S51实现十字路口交通信号灯的控制,完成系统的软硬件设计及调试。
交通灯控制器的具体功能如下:1、正常情况下交通信号灯的控制时序给定。
南北绿灯、黄灯、红灯分别用P1.0,P1.1,P1.2控制,东西绿黄红分别用P1.3,P1.4,P1.5控制。
2、设定东西方向、南北方向紧急切换按钮各一个,当紧急按钮按下时,相应方向紧急切换为绿灯,以便特种车辆通行。
实际设置的功能如下:东西红灯亮10s,南北绿灯亮6s;南北绿灯亮6s后,南北黄灯闪烁4s;南北黄灯闪烁4s后,南北红灯开始亮,东西红灯变绿灯;东西绿灯亮6s,南北红灯亮10s;6s之后,东西黄灯闪烁4s,东西变为红灯,南北红灯变绿灯,开始循环。
单片机红绿灯的汇编语言程序设计a>程序源代码ORG 0000H ;主程序的入口地址LJMP MAIN ;跳转到主程序的开始处ORG 0003H ;外部中断0的中断程序入口地址ORG 000BH ;定时器0的中断程序入口地址LJMP T0_INT ;跳转到中断服务程序处ORG 0013H ;外部中断1的中断程序入口地址MAIN : MOV SP,#50HMOV IE,#8EH ;CPU开中断,允许T0中断,T1中断和外部中断1中断MOV TMOD,#51H ;设置T1为计数方式,T0为定时方式,且都工作于模式1MOV TH1,#00H ;T1计数器清零MOV TL1,#00HSETB TR1 ;启动T1计时器SETB EX1 ;允许INT1中断SETB IT1 ;选择边沿触发方式MOV DPTR ,#0003HMOV A, #80H ;给8255赋初值,8255工作于方式0MOVX @DPTR, AAGAIN: JB P3.1,N0 ;判断是否要设定东西方向红绿灯时间的初值,若P3.1为1 则跳转MOV A,P1JB P1.7,RED ;判断P1.7是否为1,若为1则设定红灯时间,否则设定绿灯时间MOV R0,#00H ;R0清零MOV R0,A ;存入东西方向绿灯初始时间MOV R3,ALCALL DISP1LCALL DELAYAJMP AGAINRED: MOV A,P1ANL A,#7FH 1.7置0MOV R7,#00H ;R7清零MOV R7,A ;存入东西方向红灯初始时间MOV R3,ALCALL DISP1LCALL DELAYAJMP AGAIN;-------------------------------------------N0: SETB TR0 ;启动T0计时器MOV 76H,R7 ;红灯时间存入76HN00: MOV A,76H ;东西方向禁止,南北方向通行MOV R3,AMOV DPTR,#0000H ;置8255A口,东西方向红灯亮,南北方向绿灯亮MOV A,#0DDHMOVX @DPTR, AN01: JB P2.0,B0N02: SETB P3.0CJNE R3,#00H,N01 ;比较R3中的值是否为0,不为0转到当前指令处执行;------黄灯闪烁5秒程序------N1: SETB P3.0MOV R3,#05HMOV DPTR,#0000H ;置8255A口,东西,南北方向黄灯亮MOV A,#0D4HMOVX @DPTR,AN11: MOV R4,#00HN12: CJNE R4,#7DH,$ ;黄灯持续亮0.5秒N13: MOV DPTR,#0000H ; 置8255A口,南北方向黄灯灭MOV A,#0DDHMOVX @DPTR,AN14: MOV R4,#00HCJNE R4,#7DH,$ ;黄灯持续灭0.5秒CJNE R3,#00H,N1 ;闪烁时间达5秒则退出;------------------------------------------------------------N2: MOV R7,#00HMOV A,R0 ;东西通行,南北禁止MOV R3,AMOV DPTR,#0000H ; 置8255A口,东西方向绿灯亮,南北方向红灯亮MOV A,#0EBHMOVX @DPTR,AN21: JB P2.0,T03N22: CJNE R3,#00H,N21;------黄灯闪烁5秒程序------N3: MOV R3,#05HMOV DPTR,#0000H ;置8255A口,东西,南北方向黄灯亮MOV A,#0E2HMOVX @DPTR,AN31: MOV R4,#00HCJNE R4,#7DH,$ ;黄灯持续亮0.5秒N32: MOV DPTR,#0000H ; 置8255A口,南北方向黄灯灭MOV A,#0EBHMOVX @DPTR,AN33: MOV R4,#00HCJNE R4,#7DH,$ ;黄灯持续灭0.5秒CJNE R3,#00H,N3 ;闪烁时间达5秒则退出SJMP N00;------闯红灯报警程序------B0: MOV R2,#03H ;报警持续时间3秒B01: MOV A,R3JZ N1 ;若倒计时完毕,不再报警CLR P3.0 ;报警CJNE R2,#00H,B01 ;判断3秒是否结束SJMP N02;------1秒延时子程序-------N7: RETIT0_INT:MOV TL0,#9AH ;给定时器T0送定时10ms的初值MOV TH0,#0F1HINC R4INC R5CJNE R5,#0FAH,T01 ;判断延时是否够一秒,不够则调用显示子程序MOV R5,#00H ;R5清零DEC R3 ;倒计时初值减一DEC R2 ;报警初值减一T01: ACALL DISP ;调用显示子程序RETI ;中断返回;------显示子程序------DISP: JNB P2.4,T02DISP1: MOV B,#0AHMOV A,R3 ;R3中值二转十显示转换DIV ABMOV 79H,AMOV 7AH,BDIS: MOV A,79H ;显示十位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0F7HMOVX @DPTR,ALCALL DELAYDS2: MOV A,7AH ;显示个位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0FBHMOVX @DPTR,ARET;------东西方向车流量检测程序------T03: MOV A,R3SUBB A,#00H ;若绿灯倒计时完毕,不再检测车流量JZ N3JB P2.0,T03INC R7CJNE R7,#64H,E1MOV R7,#00H ;中断到100次则清零E1: SJMP N22;------东西方向车流量显示程序------T02: MOV B,#0AHMOV A,R7 ;R7中值二转十显示转换DIV ABMOV 79H,AMOV 7AH,BDIS3: MOV A,79H ;显示十位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0F7HMOVX @DPTR,ALCALL DELAYDS4: MOV A,7AH ;显示个位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0FBHMOVX @DPTR,ALJMP N7;------延时4MS子程序----------DELAY: MOV R1,#0AHLOOP: MOV R6,#64HNOPLOOP1: DJNZ R6,LOOP1DJNZ R1,LOOPRET;------字符表------TAB: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH ENDORG 0000HAJMP MAINORG 000BHLJMP INTORG 0030HMAIN:MOV R2,#20H MOV TMOD,#01H MOV TL0,#0B0H MOV TH0,#80H SETB EASETB ET0SETB TR0LOOP:MOV A,#01H MOV P1,ALCALL DELMOV R0,#02H LCALL FPLOOP1:MOV A,#02H MOV P1,ALCALL DELMOV R0,#02H LCALL FPLOOP2:MOV A, #04H MOV P1,ALCALL DELMOV R0,#05H LCALL FPMOV P1,#00H LCALL DELCJNE R0,#00H ,AASJMP LOOPFP:MOV R1,#80H MOV A,R1MOV DPTR,#3FFFH MOVX @DPTR,A RR AMOV A,R0ANL A,#0FHMOV DPTR,#TAB MOVC A,@A+DPTR MOV DPTR,#5FFFH MOVX @DPTR,A LCALL DELMOV A,#0FFHMOV DPTR,#5FFFH MOVX @DPTR,AMOV A,R1MOV DPTR,#3FFFH MOVX @DPTR,AMOV A,R0ANL A,#0F0HSWAP AMOV DPTR,#TAB MOVC A,@A+DPTR MOV DPTR,#5FFFH MOVX @DPTR,A LCALL DELMOV A,#0FFHMOV DPTR,#5FFFH MOVX @DPTR,ACJNE R0,#99H,FPRETDEL:MOV R5,#100H DEL0:MOV R6,#250H DEL1JNZ R6,DEL1 DJNZ R5,DEL0RETINT: CLR ET0DJNZ R2,GOONMOV A,R0ADD A,#99HDA AMOV R0,AMOV R2,#20HGOON:MOV TMOD,#01H MOV TL0,#0B0HMOV TH0,#80HSETB EASETB ET0RETITAB: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H END。