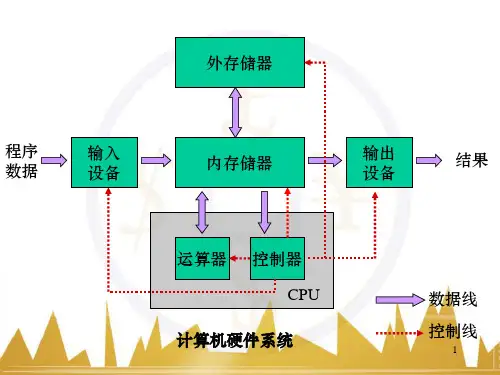
流程图+硬件框图
- 格式:vsd
- 大小:267.50 KB
- 文档页数:1
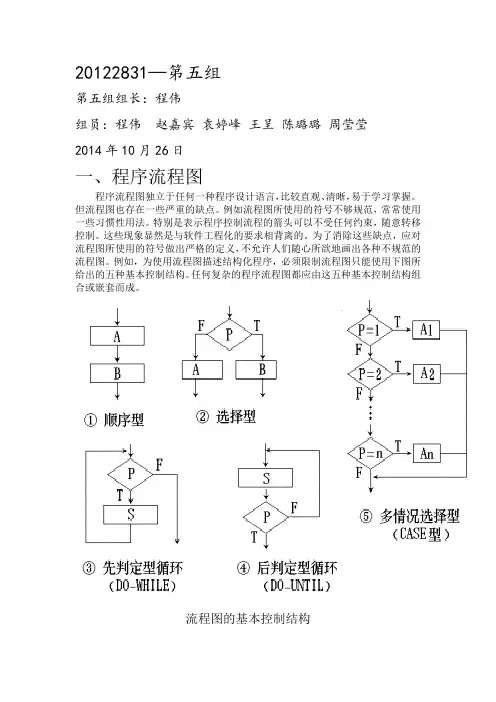
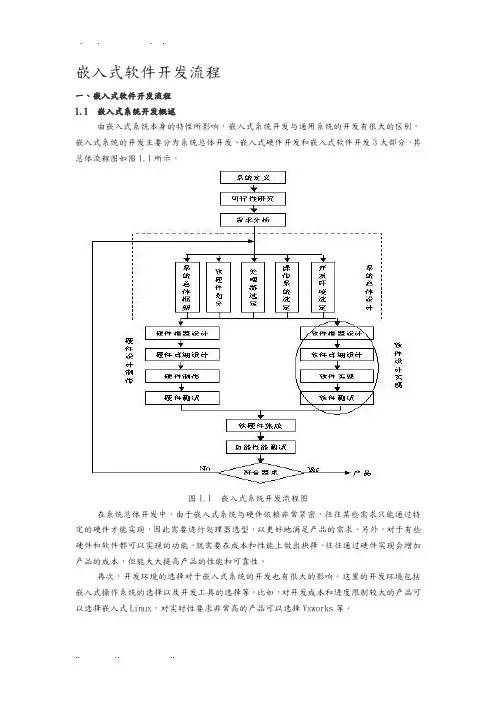
20122831—第五组第五组组长:程伟组员:程伟赵嘉宾袁婷峰王呈陈璐璐周莹莹2014年10月26日一、程序流程图程序流程图独立于任何一种程序设计语言,比较直观、清晰,易于学习掌握。
但流程图也存在一些严重的缺点。
例如流程图所使用的符号不够规范,常常使用一些习惯性用法。
特别是表示程序控制流程的箭头可以不受任何约束,随意转移控制。
这些现象显然是与软件工程化的要求相背离的。
为了消除这些缺点,应对流程图所使用的符号做出严格的定义,不允许人们随心所欲地画出各种不规范的流程图。
例如,为使用流程图描述结构化程序,必须限制流程图只能使用下图所给出的五种基本控制结构。
任何复杂的程序流程图都应由这五种基本控制结构组合或嵌套而成。
流程图的基本控制结构实例:输入三个正整数作为边长,判断该三条边构成的三角形是等边、等腰还是一般三角形。
流程图:二、盒图(N-S图)Nassi和Shneiderman 提出了一种符合结构化程序设计原则的图形描述工具,叫做盒图,也叫做N-S图。
任何一个N-S 图,都是前面介绍的五种基本控制结构相互组合与嵌套的结果。
当问题很复杂时,N-S图可能很大。
N-S图的五种基本控制结构实例:输入三个正整数作为边长,判断该三条边构成的三角形是等边、等腰还是一般三角形。
盒图三、PAD 图PAD是Problem Analysis Diagram的缩写,它是日本日立公司提出,由程序流程图演化来的,用结构化程序设计思想表现程序逻辑结构的图形工具。
PAD也设置了五种基本控制结构的图式,并允许递归使用。
PAD的基本控制结构实例:输入三个正整数作为边长,判断该三条边构成的三角形是等边、等腰还是一般三角形。
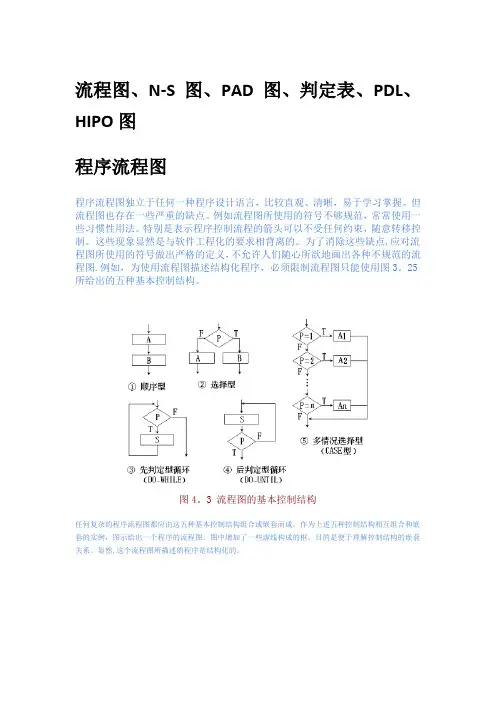
流程图、N-S图、PAD图、判定表、PDL、HIPO图程序流程图程序流程图独立于任何一种程序设计语言,比较直观、清晰,易于学习掌握。
但流程图也存在一些严重的缺点。
例如流程图所使用的符号不够规范,常常使用一些习惯性用法。
特别是表示程序控制流程的箭头可以不受任何约束,随意转移控制。
这些现象显然是与软件工程化的要求相背离的。
为了消除这些缺点,应对流程图所使用的符号做出严格的定义,不允许人们随心所欲地画出各种不规范的流程图.例如,为使用流程图描述结构化程序,必须限制流程图只能使用图3。
25所给出的五种基本控制结构。
图4。
3 流程图的基本控制结构任何复杂的程序流程图都应由这五种基本控制结构组合或嵌套而成。
作为上述五种控制结构相互组合和嵌套的实例,图示给出一个程序的流程图。
图中增加了一些虚线构成的框,目的是便于理解控制结构的嵌套关系。
显然,这个流程图所描述的程序是结构化的。
图4.4流程图的基本控制结构N-S图Nassi和Shneiderman 提出了一种符合结构化程序设计原则的图形描述工具,叫做盒图,也叫做N-S图。
为表示五种基本控制结构,在N-S图中规定了五种图形构件。
参看图4.5。
为说明N—S图的使用,仍用图4.4给出的实例,将它用如图4.6所示的N—S图表示.如前所述,任何一个N—S图,都是前面介绍的五种基本控制结构相互组合与嵌套的结果。
当问题很复杂时,N—S图可能很大.图4。
5 N-S图的五种基本控制结构图4。
6 N—S图的实例PADPAD是Problem Analysis Diagram的缩写,它是日本日立公司提出,由程序流程图演化来的,用结构化程序设计思想表现程序逻辑结构的图形工具.现在已为ISO认可。
PAD也设置了五种基本控制结构的图式,并允许递归使用。
图4。
7 PAD的基本控制结构做为PAD应用的实例,图4。
8给出了图4。
4程序的PAD表示。
PAD所描述程序的层次关系表现在纵线上。
每条纵线表示了一个层次.把PAD图从左到右展开。
NAND Flash寄存器和流程图优秀doc资料NAND Flash的读写:NAND Flash存储器件有非易失,容量大,功耗低,易擦除等特点,这里就涉及到Flash的种类问题,NORFLASH和NANDFLASH区别在于:NOR的特点是在芯片内执行,即应用程序可以直接在flash闪存内运行,不必再把代码读到系统RAM内,但是工艺复杂,价格较贵.NAND结构能提供极高的单元密度,可以达到高存储密度,大容量存储,而且便宜.缺点就是无法寻址直接运行程序,只能存储数据.另外NADNFLASH非常容易出现坏区,所以需要有校验的算法.在NAND闪存中每个块的最大擦鞋次数是100万次,而NOR的擦鞋次数是10万次.并且NAND 块的尺寸比NOR期间小8倍.NAND Flash的操作方式按页写按块擦除,写操作只能在空或者已经擦除的单元进行.(本视频内用的NAND Flash的类型是K9F2808)Flash连接电路图:编程时要涉及到:设定总线宽度和相应bank的片选信号和总线速度.本flash要用到的一些指令:一下是编程时要用到的时序图.Read ID Operation:(这张表的作用就是来判断芯片类型是否正确.)读取到的数据为:(Maker Code和Device Code是读取数据的过程)Status Read Cycle:Block ErasePage Write(一页是528Byte):Page Read1 Operation:Page Read2 Operation:数据手册上的NandFlash控制器:LUT链和寄存器链的使用在Cyclone的LE之间除了LAB局部互连和进位外,还有LUT链、寄存器链。
使用LUT 链可以把相邻的LE中的LUT连接起来构成复杂的组合逻辑,寄存器链可以把相邻的LE中的寄存器连接起来,构成诸如移位寄存器的功能,如图1所示。
图1 LUT链和寄存器链的使用寄存器的原理及应用课型:讲授 主讲:史娟芬教学目的:掌握数码寄存器和移位寄存器的逻辑功能 教学重点:掌握中规模四位双向移位寄存器的逻辑功能 教学难点:掌握中规模四位双向移位寄存器的逻辑功能 教学课时:两课时复习提问:写出RS 触发器、JK 触发器、D 触发器、T 触发器、T`触发器的逻辑功能、特性方程。
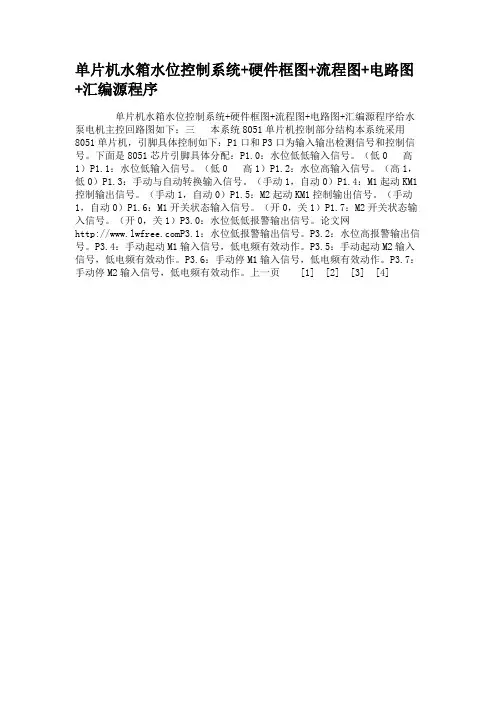
单片机水箱水位控制系统+硬件框图+流程图+电路图+汇编源程序
单片机水箱水位控制系统+硬件框图+流程图+电路图+汇编源程序给水泵电机主控回路图如下:三本系统8051单片机控制部分结构本系统采用8051单片机,引脚具体控制如下:P1口和P3口为输入输出检测信号和控制信号。
下面是8051芯片引脚具体分配:P1.0:水位低低输入信号。
(低0 高1)P1.1:水位低输入信号。
(低0 高1)P1.2:水位高输入信号。
(高1,低0)P1.3:手动与自动转换输入信号。
(手动1,自动0)P1.4:M1起动KM1控制输出信号。
(手动1,自动0)P1.5:M2起动KM1控制输出信号。
(手动1,自动0)P1.6:M1开关状态输入信号。
(开0,关1)P1.7:M2开关状态输入信号。
(开0,关1)P3.0:水位低低报警输出信号。
论文网
P3.1:水位低报警输出信号。
P3.2:水位高报警输出信号。
P3.4:手动起动M1输入信号,低电频有效动作。
P3.5:手动起动M2输入信号,低电频有效动作。
P3.6:手动停M1输入信号,低电频有效动作。
P3.7:手动停M2输入信号,低电频有效动作。
上一页[1] [2] [3] [4]。

智能玩具——机器狗的研发摘要:凌阳科技公司的SPCE061A,不但具备微控制器的功能,还具有DSP运算功能,可以用来进行数字语音信号处理,可以实现语音的播放、识别、录制等功能。
本产品就是利用SPCE061A的该功能设计的一款智能玩具。
该玩具可以在人的语音指令下完成“前进”、“后退”、“变速”、“演奏”等动作,和人有良好的互动性,实现了玩具的智能化。
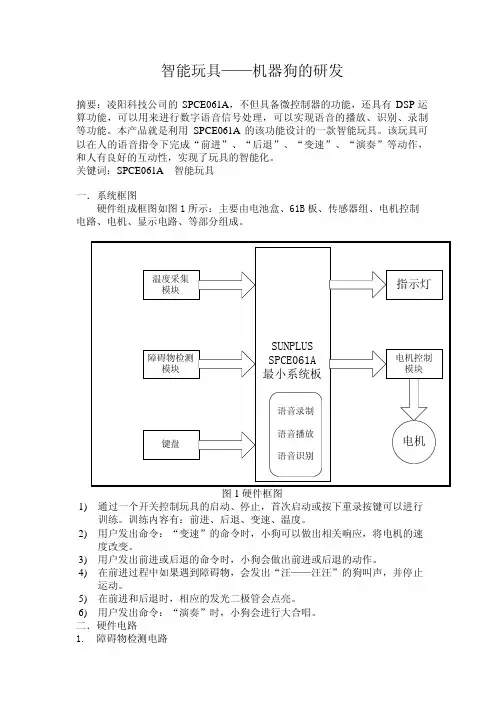
关键词:SPCE061A 智能玩具一.系统框图硬件组成框图如图1所示:主要由电池盒、61B板、传感器组、电机控制电路、电机、显示电路、等部分组成。
图1 硬件框图1) 通过一个开关控制玩具的启动、停止,首次启动或按下重录按键可以进行训练。
训练内容有:前进、后退、变速、温度。
2) 用户发出命令:“变速”的命令时,小狗可以做出相关响应,将电机的速度改变。
3) 用户发出前进或后退的命令时,小狗会做出前进或后退的动作。
4) 在前进过程中如果遇到障碍物,会发出“汪——汪汪”的狗叫声,并停止运动。
5) 在前进和后退时,相应的发光二极管会点亮。
6) 用户发出命令:“演奏”时,小狗会进行大合唱。
二.硬件电路1. 障碍物检测电路出于成本的考虑,这里采用红外对管作为障碍物检测的传感器。
由于红外对管容易受可见光干扰,为避免在不同的光线环境下,该传感器都能正常工作,特采用循环检测的方式。
实践证明该方式非常的有效。
2. 显示电路显示电路由两个发光二极管指示电机工作状态。
前进时D5绿灯(IOB11)亮,后退时D6红灯(IOB10)亮。
电路原理图如下:图3 显示电路3. 电机驱动控制电路电机控制电路原理及控制模块:其控制电路如图4所示。
电机驱动控制电路由I/O 口输出信号送PB8和PB9,J13是电机插座,VDD 是给电机供电的电源。
电机的控制原理为:通过PB8和PB9的不同电平输入,在J13处得到正反向控制电压来实现电机的正反转,例如:当PB8为高PB9为低时,三极管Q1、Q2、Q3导通;三极管Q6、Q7、Q8截止,此时由于Q2导通Q8截止,J13的1脚相当于接地,由于Q3导通Q7截止,电源J13的2脚相当于接电源VDD ,这样就可以在J13处获得一个正向电压(2(+),1(—)),从而驱动电机正向转动,当需要电机反转时,同理只需使输入端PB8和PB9的电平反向即可。
课程设计题目:简易数字信号发生器学院:电子工程学院专业:光电信息科学与工程班级:一、 课程设计要求以msp430单片机为核心,通过一个DA (数字模拟)转换芯片,将单片机输出的方波、三角波、正弦波(数字信号)转换为模拟信号输出。
提供芯片:msp430G2553/msp430f5529、DAC0832、REF102、LM384、OP07。
1.基本要求(1)供电电压 VDD= 5V~12V ; (2)信号频率:5~500Hz(可调);(3)输出信号电压可调范围:≥0.5*VDD ,直流偏移可调:≥0.5*VDD ; (4)完成输出信号切换;(5)方波占空比:平滑可调20%~80%;(6)通带内正弦波峰峰值稳定度误差:≤±10%(负载1K ); (7)提交设计报告。
2.发挥部分(1) 信号频率:5~2000Hz(可调);(2) 多通道同时输出同频正弦波,方波,三角波。
(频率可调); (3) 输出频率与幅度可调的正弦波与余弦波,相位误差≤±5度; (4) 自由发挥。
二、 系统硬件和软件框图1、系统硬件框图图1 系统硬件框图 MSP430GDAC0832LM358 放大模块控制按键 DAC0832电源模块2、软件框图图2 系统软件框图各函数的作用和相互关系:在主函数中首先对系统的时钟、I /O 口、定时器进行了初始化。
初始化完毕,开启总中断。
接着进入循环等待定时器中断子程序的执行。
按键中断函数主要对三个菜单按键的动作进行处理。
这三个菜单按键可以实现波形的切换,频率的加减,信号的使能输出。
在按键中断函数中修改的信号频率大小和波形的种类这两个参数会被主函数和定时器中断函数调用。
三、 硬件系统设计1、 方案论证与选择 方案一:利用DAC 0832的11号管脚做为信号输出端,8号管脚输入基准电压,将其输出的电流信号再转换为电压信号进行检测调试。
方案二:利用DAC 0832的8号管脚做为信号输出端,11号管脚输入基准电压,其输出直接为电压信号,可以直接利用示波器进行检测调试。
硬件设计流程图1整个产品的开发步骤,从宏观来看还是遵循从设计到初样到用户试用到改进到产品定型的过程(具体见下图),从阶段上讲是从研发到中试的过程,最后产品技术定型,生产工艺基本定型。
流程各阶段事件说明如下:I.阶段A以上是按照公司的相关流程,如《产品识别程序》、《项目计划编写规范》、《系统设计程序》、《配置管理计划编写规范》等完成,(由部门经理、项目经理等组织完成)II.阶段B(产品、系统整体设计方案)该阶段对于纯粹的软件产品(不涉及硬件)则相当于阶段D1(软件部分概要设计),完成软件的概要设计,这时阶段D1可以忽略;对于纯粹的硬件产品(不涉及软件及电路开发),则直接走外包外协或采购的流程;对于含电路开发的产品(不含软件),则相当于阶段C1(硬件部分概要设计),这时阶段C1可以忽略。
对于软硬件结合的产品,结合《需求规格说明》在《设计方案》中将软硬件的界限,达到的性能要求划分清楚,同时要提出更详细的进度计划和人员安排,若有外形要求也需加入,外形设计直接走外协外包方式。
(由项目经理组织由项目主管设计师、产品结构设计工程师、电路设计工程师和软件设计工程师完成,形成《产品(项目) 系统整体设计报告》)III.阶段C1(硬件部分概要设计)包括行为动作设计,结构设计,框图设计及简单逻辑设计,(根据单位成本和开发时间来具体决定系统结构),若硬件简单,可以省略阶段C2(硬件部分详细设计),(由硬件设计工程师组织完成,《硬件部分概要设计》)IV.阶段C2(硬件部分详细设计)包括细化结构框图,详细的框图与框图之间接口,及完整的逻辑设计,芯片基本定型,并要详细说明涉及的需采购或外包的电路模块。
(由硬件设计工程师组织完成,《硬件部分详细设计》)V.阶段C3(设计实现阶段)完成电路原理图设计,包括可能的软件仿真设计,完成电路板制作和焊接及元器件采购,这里涉及到印刷电路板的外协生产,焊接外协和器件采购等,所有需外协的要求及图纸,均需在项目主管设计师处电子文挡备案,同时需将图纸等打印出来,并要有设计工程师签字,然后由项目主管设计师签字认可,最后由项目经理签字,最后走外协流程;对于采购,也是由设计工程师上报,然后由项目主管设计师签字,最后由项目经理签字,最后走采购流程。
目前,可编程序控制器〔简称PLC〕由于具有功能强、可编程、智能化等特点,已成为工业控制领域中最主要的自动化装置之一,它是当前电气程控技术的主要实现手段。
用PLC 控制系统取代传统的继电器控制方式,可简化接线,方便调试,提高系统可靠性。
触摸屏是专为PLC 应用而设计的一种高科技人机界面产品,由于操作简便、界面美观、节省控制面板空间、性价比高和人机交互性好等优点,近年来已越来越多地被应用于工业控制等领域。
本文利用PLC 和触摸屏技术研制了水位传感器测试系统,该系统主要用于进行洗衣机用水位传感器的质量检测,整个系统实现简单、稳定性好、自动化程度高,代替了以前的纯手动操作,较好地满足实际生产的要求,提高了生产效率。
洗衣机用水位传感器的工作原理是将水位高度的变化转换成传感器内部膜片上压力的变化,从而导致传感器输出电感L 的变化,将水位传感器输出电感与外部电路组成LC 振荡电路,就可将电感的变化转换成振荡频率的变化,不同的水位高度通过水位传感器可以产生不同的振荡频率,最后通过检测振荡频率与水位高度的对应关系,就可实现水位传感器的质量检测。
图 1 控制系统原理框图图 1 为控制系统原理框图。
测试系统要求能在不同的水位高度时,准确测量出由水位传感器组成的振荡电路的振荡频率,水位高度和振荡频率的测量精度要求较高,因此,对测试系统的要求较高。
作为主电机的直流电动机由PLC 进行控制,电机实现PID 调速,电机的输出通过减速机构与执行机构相连,最后带动细钢管在水箱中上下移动来按检测要求控制管内水位高度的准确变化,通过编码器实现水位高度变化的实时检测,频率的实时检测由PLC 的高速计数器来完成。
控制命令的输入接PLC 的输入端,PLC 的输出端接执行继电器和工作状态指示灯等。
系统中采用触摸屏作为人机界面,显示操作画面,进行参数修改和指令输入。
通过触摸屏可实现水位上升、下降高度等参数的设定和修改,实现实际水位高度变化、输出振荡频率和总产量等的实时显示等,并可对工作进程进行实时监控。