差分GPS定位技术在ITS中的应用.
- 格式:doc
- 大小:39.50 KB
- 文档页数:15

GPS全球定位系统原理及应用一、简介GPS 是英文Global Positioning System(全球定位系统)的简称,而其中文简称为“球位系”。
GPS是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统。
其主要目的是为陆、海、空三大领域提供实时、全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的,是美国独霸全球战略的重要组成。
经过20余年的研究实验,耗资300亿美元,到1994年3月,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。
在机械领域GPS则有另外一种含义:产品几何技术规范(Geometrical Product Specifications)-简称GPS。
二、GPS发展历程1. GPS实施计划共分三个阶段第一阶段为方案论证和初步设计阶段。
从1973年到1979年,共发射了4颗试验卫星。
研制了地面接收机及建立地面跟踪网。
第二阶段为全面研制和试验阶段。
从1979年到1984年,又陆续发射了7颗试验卫星,研制了各种用途接收机。
实验表明,GPS定位精度远远超过设计标准。
第三阶段为实用组网阶段。
1989年2月4日第一颗GPS工作卫星发射成功,表明GPS系统进入工程建设阶段。
1993年底实用的GPS 网即(21+3)GPS星座已经建成,今后将根据计划更换失效的卫星。
2.卫星导航的发展历史1957年十月四日,第一课人造卫星Sputink I(苏联)发射。
1959年,从卫星上发回第一张地球照片。
1960年,从“泰罗斯”与“云雨”气象卫星上获得全球云图。
1971年,美国“阿波罗”对月球表面进行航天摄影测量,且“水手号”对水星进行测绘作业。
目前,空间在轨卫星约为3000颗。
三、定位原理1.GPS构成:①空间部分GPS的空间部分是由21颗工作卫星组成,它位于距地表20200km的上空,均匀分布在6 个轨道面上(每个轨道面4 颗) ,轨道倾角为55°。

浅谈GPS实时动态定位原理及应用0、引言随着我国经济的高速发展,为了满足工程施工、测绘等工作的需要,采用GPS 实时动态定位技术的测绘系统逐步进入我国市场。
采用传统GPSRTK (Real-Time-Kinematic)技术的测绘系统的数据链路电台,必须经过无线电管理部门批准才可设置使用,但在此前的几起此类设备所造成的无线电干扰案例中,所查获的无线电台均未向无线电管理部门申报。
目前这类设备使用时所造成的无线电干扰越来越多,因此无线电管理部门应该加强对这类设备的管理。
而增加对GPSRTK技术的了解和认识,将会对查处工作及无线电管理工作大有帮助。
1RTK概述RTK(Real-Time-Kinematic)技术是GPS实时载波相位差分的简称。
这是一种将GPS与数传技术相结合,实时解算并进行数据处理,在1~2秒时间内得到高精度位置信息的技术。
RTK的工作原理是将一台接收机置于基准站上,另一台或几台接收机置于载体(称为流动站)上,基准站和流动站同时接收同一时间、同一GPS卫星发射的信号,基准站所获得的观测值与已知位置信息进行比较,得到GPS差分改正值。
然后将这个改正值通过无线电数据链电台及时传递给共视卫星的流动站精化其GPS观测值,从而得到经差分改正后流动站较准确的实时位置。
精密GPS定位均采用相对技术。
无论是在几点间进行同步观测的后处理(RTK),还是从基准站将改正值传输给流动站(DGPS),这些都称为相对技术,以采用值的类型为依据可分为4类:(1)实时差分GPS,其精度为1m~3m;(2)广域实时差分GPS,其精度为1m~2m;(3)精密时差分GPS,其精度为1cm~5cm;(4)实时精密时差分GPS,其精度为1cm~3cm。
差分的数据类型有伪距差分、坐标差分和相位差分三类。
前两类定位误差的相关性,会随基准站与流动站的空间距离的增加而迅速降低。
故RTK采用第三类方法。
RTK的观测模型为:因轨道误差、钟差、电离层折射及对流层折射的影响在实际的数据处理中一般采用双差观测值方程来解算,在定位前需确定整周未知数,这一过程称为动态定位的“初始化”(OnTheFly即OTF)。
GPS控制测绘技术在地理信息系统中的应用摘要在信息技术迅猛发展的刺激下,gps卫星定位技术不仅给控制测绘工作带来了一系列的新变化,如影响地籍测量、地形图绘制、工程测量,而且被运用地理信息系统之中,这就反作用于现代信息技术发展。
本文对gps控制测绘技术进行分析,并探讨其如何在地理信息系统中应用。
关键词 gps控制测绘技术;地理信息系统;应用分析中图分类号p2 文献标识码a 文章编号 1674-6708(2013)93-0115-02全球卫星定位系统(gps),是在全球范围内,通过卫星导航进行测距,而形成的一个全球定位系统,其具有全球性、连续性以及实时性特征,能够有效抵御外部干扰,具有良好的保密性,并且提供精准的三维坐标。
随着gps技术的发展,其应用领域越来越广,尤其在地籍测量、工程测量以及地形图绘制中发挥着重要作用,这就给控制测绘工作带来了积极性影响,而随着gps控制测绘技术的发展,gps控制测绘技术与gis系统相结合,且被应用到城市gis系统的电子地图制作中。
1 gps控制测绘技术1.1 gps控制测绘技术特点随着信息技术的发展,gps控制测绘技术被应用到实际测量中,并建立起新型的测量模式,具体来看,gps控制测绘技术与传统的测绘技术相比,具有以下几个创新点:其一,创新性的测量方法。
传统的测量方法,使用经纬仪测角、测距仪测距和水准仪测量高差,而gps控制测绘技术不仅采用以上测量方法,而且采用gps定位技术,并以此技术为主,这就实现了传统测量技术与现代技术的结合,利于确定空间中点的准确位置。
其二,从测量效果上来看。
首先,由于gps系统具有实时性特征,因此gps控制测绘技术能够根据不同的客户需求,提供多样化的设计形式,并能够根据客户的不定时要求,作出实时更改,这就有效避免了事后更改造成的人力、物力的损失,进而提升了工作效率。
其次,gps控制测绘技术的数据传输和处理都必须经过计算机作业后才能完成,这就有效保障了数据质量,进而获得更具准确性的三维坐标。

测绘技术中的差分GPS技术原理差分GPS技术是现代测绘技术中一种重要的定位和测量方法。
通过使用差分GPS技术,可以得到高精度、高精度的位置信息,这对于土地测量、工程建设、导航等领域都具有重要意义。
本文将介绍差分GPS技术的原理和应用。
一、差分GPS技术的基本原理差分GPS技术是利用地面上的一个或多个基准站的GPS接收机,与测量场地的GPS接收机进行卫星观测,然后将两者的观测结果进行比较,计算出差分校正值,并将差分校正值应用到需要测量的位置上,从而得到高精度的位置信息。
差分GPS技术的原理可以简单地描述为以下几个步骤:1. 基准站观测:选取一个或多个基准站,在这些基准站上安装GPS接收机,通过接收卫星信号,得到基准站的位置信息。
2. 测量场地观测:在需要进行测量的场地上,同样安装GPS接收机,通过接收卫星信号,得到场地的位置信息。
3. 观测数据处理:将基准站和测量场地的GPS观测数据进行差分计算,得到差分校正值。
4. 差分校正:将差分校正值应用到测量场地的GPS位置信息上,从而得到高精度的测量结果。
二、差分GPS技术的应用差分GPS技术在测绘领域具有广泛的应用。
下面将介绍几个典型的应用场景:1. 土地测量:在进行土地测量时,使用差分GPS技术可以得到高精度的位置信息,从而实现土地边界的精确定位和测量。
2. 工程建设:在进行工程建设时,需要准确测量土地的形状和位置。
差分GPS技术可以为工程建设提供高精度的测量数据,从而确保工程的准确定位和建设质量。
3. 地理信息系统(GIS): GIS是一种集成了位置信息和属性信息的系统,广泛用于城市规划、资源管理等领域。
差分GPS技术可以为GIS提供高精度的位置信息,从而提高GIS数据的准确性和可靠性。
4. 导航系统:差分GPS技术可以提供精确的位置信息,因此可以被应用到导航系统中,使得导航设备能够更准确地定位用户的位置和导航目标。
三、差分GPS技术的优势和挑战差分GPS技术相比传统的GPS技术有以下几个优势:1. 高精度:通过差分校正,可以实现亚米级的位置测量精度,比传统GPS技术提高了一个数量级。

GPS定位测量技术的优势及其在工程测绘中的运用摘要:在工程测量工作中应用GPS技术,有利于提高测绘工作的效率,有利于提高定位数据信息的精确性,也有利于提高工程测量工作的自动化水平,还有利于加强对于灾害的预测工作。
因此,相关工作人员应该充分发挥GPS技术在工程测量工作中的优势,提高实际工作的规范性与科学性,严格按照相关要求来进行测量任务。
关键词:工程测绘;GPS定位测量;应用优势前言现阶段,GPS伪距差分测绘技术在建筑工程测量中的应用范围最广,几乎所有的商用差分GPS接收机均采用这种技术。
这种技术的主要应用过程为:基于基准站的接收机设备,计算目标观测点位到可见卫星(一般确定四颗位置确定的卫星即可)之间的距离,之后将这一通过计算获得的距离具体值与含有误差的测量值相互比较,最终将与所有可见卫星的测距误差全部传输给测绘人员。
测绘人员可以利用测距误差,实现对测量伪距的修正,最后基于修正后的伪距,将观测点位的精确位置相关参数求出,待消去公共误差之后,便可得到较为精准的观测点位信息。
1 GPS测绘技术在工程测量中的应用优势GPS测绘技术中,定位系统起支撑作用。
现阶段的GPS定位系统由三个部分组成,分别是:(1) GPS卫星及其构成的星座,属于空间部分。
(2)地面监控系统,属于地面控制部分。
(3) GPS信号接收机,属于用户设备部分。
GPS卫星的主要作用是:(1)能够接收来自地面站发射的导航电文以及其他信号;(2)能够接收地面站发出的各种指令,从而对出现偏差的轨道进行修正或是启动备用设备;(3)能够连续不断地向地面发送GPS导航以及定位信号地面监测系统一般设置一个主控站、三个注入站、五个监测站。
主控站内一般设置大型电子计算机,以其为主体,负责开展数据的收集、计算、传输作业。
监测站的主要功能是,收集并传递各类型信息并将之传递给主控站。
注入站一般设有特定型号的抛物面天线、固定电路C波段发射机和计算机,主要作用是将来自主控站的导航电文注入卫星存储器中。
测绘技术中常用的GPS差分技术介绍GPS(全球定位系统)作为现代测绘技术中不可或缺的一部分,已经广泛应用于地图绘制、地理信息系统以及导航等众多领域。
在GPS测绘中,差分技术是一种重要手段,它通过比较接收机所接收到的GPS信号与参考站接收到的信号之间的差异,实现对GPS测量误差的补偿,提高测量精度和可靠性。
一、差分测量的基本原理差分测量是通过同时接收接收机分别与基准站之间的GPS信号,比较这两个信号之间的差异来消除误差的一种方法。
基础差分技术包括实时差分技术和后处理差分技术,两者的差异主要在于差分信号的获取方式和处理时间。
实时差分技术是指测量过程中,接收机与基准站通过无线电或者互联网传输实时观测数据,并实时进行差分处理。
该技术具有实时性强、响应速度快的优点,适用于需要快速获取测量结果的场景,如施工现场测量、导航系统等。
后处理差分技术是在测量结束后,将接收机的观测数据与基准站的观测数据进行比较和差分处理。
相对于实时差分技术来说,后处理差分技术的精度更高,适用于对测量精度要求较高的场合,如地质勘探、大地测量等。
二、实时差分技术的应用实时差分技术是差分测量中最常见和最广泛应用的一种技术手段。
在实时差分技术中,需要建立一个基准站,该基准站同时接收到GPS卫星的信号并记录下来,然后与周围的移动接收机进行通信和数据传输。
通过对接收机信号和基准站信号进行差分处理,可以得到更为精确的测量结果。
实时差分技术主要用于导航和地理信息系统。
在导航系统中,实时差分技术可以帮助车辆、飞机等交通工具准确地定位,为导航提供精确的位置信息。
在地理信息系统中,实时差分技术可以提供高精度的地图数据,使得地理信息系统的应用更加精准和可靠。
三、后处理差分技术的应用后处理差分技术相对于实时差分技术来说,对计算机性能要求较高,但是其精度更为可靠,并且可以应用于多种场合。
后处理差分技术需要在测量结束后,将接收机记录的测量数据与基准站记录的数据进行差分处理,得到最终的测量结果。
GPS定位技术——差分GPS技术一、GPS系统的提出全球定位系统是美国国防部部署的一种卫星无线电定位导航与报时系统,GPS是全球定位系统的简称。
20世纪50年代后期,美国派侦察船跟踪侦察苏联向太平洋发射洲际弹道导弹时发现,如果知道导弹轨迹,就可推出船的位置,那么导弹换成在轨卫星也行。
在此思想指导下,1958年底,美国海军委托霍普金斯大学应用物理实验室研究军用舰艇导航服务的卫星系统,即海军导航卫星(又称子午仪导航系统),于1964年1月研制成功,用于北极星核潜艇的导航定位并逐步用于各种军舰导航定位。
尽管子午仪导航系统已得到广泛的应用,并显示出巨大的优越性,但也存在严重缺陷,一台接收机需观察15次合格卫星通过才能达到10m的单点定位精度,而且只能给出2维坐标———经度和纬度,不能给出高程。
鉴于子午仪导航系统存在的缺陷及海陆空三军和民用部门对导航要求越来越高,美国于1973年正式开始GPS的研究和论证工作。
开始方案是24颗卫星平均分布在互成120°的3个轨道平面上,对于地球上的任何位置均能同时观测到6~9颗,后调整为18颗卫星分布在互成60°的6个轨道面上,每个轨道面上布3颗,彼此相距120°,从一个轨道面到下一个轨道面的卫星错动40°,保证地球上任何一点均能同时观察到4颗星,经过一段实验后于1990年初对卫星配置进行第三次修改,最终由21颗工作卫星和3颗在轨备用星组成,于1993年建成(如图1)。
除了美国的GPS之外,俄罗斯也拥有类似系统———全球导航卫星系统,于1995年建成,我国于2000年先后发射了两颗自行研制的“北斗导航试验卫星”,构成北斗导航系统,标志着我国将拥有自主研制的第一代卫星导航定位系统。
二、GPS系统的组成GPS系统由导航星座、地面台站和GPS接收机3部分组成。
导航星座由21颗工作星和3颗备用星,分布在6条轨道上,轨道呈圆形,偏心率为0·01,轨道高度20200km,倾角55°,运行周期为12小时,每颗星以1575·42Hz和1227·60Hz两种频率为军事用户播发加密的高精度导航数据(P码),定位精度可达10米,测速精度0·1m/s,授时精度为10ns,同时以1575·42Hz的频率为民用用户播发精度较低的导航数据(C/A码),定位精度100米。
概述1 随着社会的发展,机动车辆增加,交通拥塞导致时间延迟,交通事故增多,环境污染加剧,这些都会造成巨大的经济损失。
各国纷纷开展研究,旨在利用计算机、现代通信及自动化等现代高新技术来改善交通状况,建立智能交通系统 ,合理利用现有道路交通设施,充分发挥道路交通的 (ITS潜能,提高道路通行能力,以便有效地解决交通拥塞现象。
是将先进的信息技术、导航定位技术、数据通信技术、 ITS 自动控制技术、图像分析技术以及计算机网络与处理技术等现代高新技术有效地运用于整个交通运输体系,使人、车辆、道路密切配合,和谐地统一,建立在一种大范围内、全方位发挥作用的实时、准确、高效的运输综合系统,是一种新型交通系统。
在智能交通系统中的应用主要基于这样一种考虑:GPS 在中,一个关键的问题就是要准确地知道车辆当前所在 ITS 的位置,这个问题通常采用全球定位系统技术解决。
(GPS是美国维护的卫星全球定位系统,包括个部分:GPS 3GPS卫星空间部分、地面支撑系统地面监控部分、接收 ( ( GPS 机用户部分。
它可以为地面用户提供精确的三维位置、三 ( 维速度和时间。
它由颗距地球万多公里的人造地球卫星 242组成,形成对地面的连续、均匀覆盖。
定位的特点是全 GPS 天候、实时性和高精度,因此倍受测量和导航用户的青睐。
在中的应用主要体现在车辆定位和导航上,在 GPS ITS 的诸多应用中,车辆定位导航应用发展最快,它可以改 GPS 善交通条件,提高交通流量和系统动态响应通行条件,从而避免地区交通拥挤,取得巨大的经济效益和社会效益。
目前,车辆应用已跃居各应用之首, 车辆应用有种 GPS GPS 3类型:美国的汽车急救系统; 日本的车辆导航仪; (1(2(3中国的车辆调度系统。
从目前的情况来看,日本的车辆导航仪应用最具规模,而且已有全国性的与之匹配的道路交通信息系统及其中心。
美国的急救系统也在不断的扩大应用之中。
我国的车辆调度指挥系统正值蓬勃发展,尤其在公 GPS 安、金融部门中应用最为广泛。
是一套较为完备的服务体系, 服务可分为大 ITS ITS 6组,包括:旅行和交通管理、商业车辆管理、公共运输管理、电子付款、应急管理和先进的车辆安全系统,这大服 6务又可进一步细化为个服务种类,其中至少有种需要知 288道车辆的实时位置。
对车辆导航的精度要求见表。
ITS 1表对车辆导航的精度要求表1 ITS服务种类精度要求(m 服务种类精度要求(m 防撞 1导航与路线引导5~20自动车辆监视 30数据采集 25~35自动车辆识别30车辆指挥与控制 30~50公共安全 10自动话音报站 25~30资源管理30应急响应75~100事故或应急响应 30采用差分技术的原因在于:美国政府在设计 GPS GPS 中,计划提供两种服务:一种是标准定位服务 ,利用— SPS 粗码定位,精度约为试验应用时,实际精度达(C/A100m(,提供给民间用户使用;另一种是精密定位服务 14m — ,利用精码码定位,精度达到试验应用时,实际 PPS (P 10m(精度达 ,提供给军方和特许的民间用户使用。
鉴于现实 3m 与计划的矛盾,美国政府采取了政 SA(Selective Availability策,人为地将误差引入卫星时钟和卫星数据中,故意降低的定位精度,保证其军事上的优势。
事实上,差分技术 GPS 很早就被人们所应用,它实际上是在一个测站对两个目标的观测量、两个测站对一个目标的观测量或一个测站对一个目标的两次观测量之间进行求差。
其目的在于消除公共项,这包括公共误差和公共参数,而提取有用的相对量。
在差分技术中,通过求差通常包括位置差分和伪距差分部分 GPS ( 地消除距离不远的两个单点的卫星种差、星历误差、电离层延迟误差、对流层延迟误差。
经过差分之后,民用的精GPS 差分定位技术在中的应用GPS ITS 金辉,胡福乔,霍宏上海交通大学图像处理与模式识别研究所,上海(200030摘要 : 差分技术在智能交通系统中的应用主要体现在车辆定位和导航两个方面,而实现导航首先必须要解决定位问题。
文章内容包 GPS 括:差分的定位原理主要介绍伪距差分原理,误差估算的数学模型,最后给出采用集中差分技术的应用实例以及对它的评价,并简要介 GPS ( 绍了一些差分设备。
GPS 关键词 :智能交通系统; ;差分 GPS GPSApplications of Differential GPS in ITS, , JIN HuiHU FuqiaoHUO Hong(Institute of Image Processing & Pattern Recognition, Shanghai Jiaotong Univ., Shanghai 200030【】 -Abstract There are two ways using DGPS in ITSvehicles location and navigation, and location is the base of navigation .This paper summarizesthe theory of DGPS (mainly about pseudo-range DGPS and presents the mathematical model for error estimation .At last an application using centralized differential GPS technology and its estimation are given .Some DGPS devices are introduced in addition.【】 ; ; Key wordsIntelligent transportation systems(ITSGlobal positioning systemDifferential GPS第 28卷第 10期Vol.28 № 10计算机工程 Computer Engineering2002年 10月 October 2002・工程应用技术与实现・中图分类号 : TP18文章编号 :1000— 3428(200210 — 0200— 03文献标识码 :A— 200—度可达到的水平。
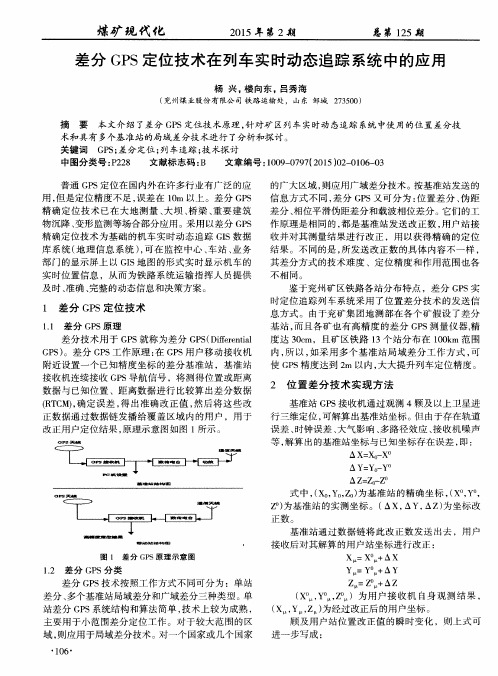
3~5m差分的定位原理2 GPS根据差分基准站发送的信息方式不同可将差分 GPS GPS 定位技术分为:伪距差分、相位平滑伪距差分、载波相位差分和位置差分原理较简单,本文略去介绍。
它们的工作原 ( 理是相同的,都是由基准站发送改正数,由用户站接收并对其测量结果进行改正,以获得精确的定位结果。
所不同的是,发送改正数的具体内容不一样,其差分定位精度也不同,这里主要介绍采用的伪距差分原理。
安装在基准站上的接收机观测颗卫星后便可进行三维定位,解算出基准 GPS 4站的坐标。
伪距差分(1伪距差分是目前用途最广的一种技术。
几乎所有的商用差分接收机均采用这种技术。
在基准站上的接收机要求 GPS 得到它与可见卫星间的距离,并将此计算出的距离与含有误βα−差的测量值加以比较。
利用一个滤波器将此差值进行滤波并求出偏差。
然后将所有卫星的测距误差传输给用户, 用户利用此测距误差来改正测量的伪距。
最后,用户利用改正后的伪距求解出本身的位置,就可消去公共误差,提高定位精度。
iρ基准站的接收机测量出全部卫星的伪距和收集 GPS等、、、、、t i e A Ωω全部卫星的星历文件。
利用已采集 (的轨道根数计算出各个卫星的地心坐标 , , [XY Z]i ,同时, 我们可以获得基准站的地心坐标 , , [XY Z]b 。
这样,利用每一时刻计算的卫星地心坐标和基准站的已知地心坐标求出每iR 一时刻到基准站的真距 :222 ( ( b i b i b i i Z Z Y Y X X R −+−+−=式中,上标 i表示第颗卫星,下同。
i 基准站接收机测量的伪距包括各种误差,与真距不 GPS 同。
可以求出伪距的改正数:iiiR ρρ−=∆ (1iρ&∆同时可求出伪距改正数的变化率为i ρ∆iρ&∆基准站将和传给各用户台,用户台测量出伪i uρ距再加上以上的改正数,便求得经过改正的伪距:( ( ( (0t t t t t ii i u i ucorr −∆+∆+=ρρρρ& (3利用改正后的伪距 ,只要观测颗卫星就可以 4按下式计算用户站的坐标。
iucorr ρ1v d CR i u +•+τ = =1222 ( ( (v d C Z Z Y Y X X u i u i u i +•+−+−+−ττd 式中, 为钟差, 为接收机噪声。
v 相位平滑伪距差分(2接收机除了提供伪距测量外,稍加改进,可同时提 GPS 供载波相位测量。
由于载波相位的测量精度比码相位的测量精度高个数量级,因此如果能获得载波整周数,就可以获 2得近乎无噪声的伪距测量。
一般情况下,无法获得载波整周数,但能获得载波多普勒频率计数。
实际上,载波多普勒计数测量反映了载波相位变化信息,即反映了伪距变化率的测量。
在接收机中一般利用这一信息作为用户的速度估 GPS 计。
考虑到载波多普勒测量的高精度,并且精确地反映了伪距变化,因此若能利用这一信息来辅助码伪距测量就可以获得比单独采用码伪距离测量更高的精度。
这一思想也就称为相位平滑伪距测量。
载波相位差分技术(3精度为米级的差分应用已成功应用于较多的领域, GPS 随之而来的是更加精密的测量技术——载波相位差分技术, 这又称为技术,是建立在实时处 RTK(Real Time Kinematic理两个测站的载波相位基础上的。
它能实时提供观测点的三维坐标,并达到厘米级的高精度。
与伪距差分原理相同,由基准站通过数据链实时将其载波观测量及站坐标信息一同传送给用户站。
用户站接收卫星的载波相位与来自基准站 GPS 的载波相位,并组成相位差分观测值进行实时处理,能实时给出厘米级的定位精度。
实现载波相位差分技术的方法分为两类:修正法与差分法。
前者与伪距差分相同,基准站将载波相位修正量发送给用户站,以改正其载波相位,然后求解坐标。
后者将基准站采集的载波相位发送给用户台进行求差解算坐标。
前者为准技术,后者为真正的技术。
RTK RTK 引入误差估算的数学模型3 掌握差分定位技术在中应用所采用的原理后, GPS ITS 还必须经过实际的测试检验。
一般采用这两种方法:相 (1对测量包括静止测量和运动测量 :这是在统一的坐标系中 ( 进行的,它代表了差分测量系统的定位精度; 绝对测 GPS (2量:在差分应用中,一般都是与当地坐标系或当地地形 GPS 图相联的。
如一定地区航线运动时偏离量是多少,利用 GPS 测量的距离与真实距离差别有多大,这就需要绝对测量。