电动机转速的测量
- 格式:ppt
- 大小:5.27 MB
- 文档页数:72
电动车转速测量的原理电机转速测量方法有哪些1、测速发电机测速定义:利用直流发电机输出电压与转速成正比的原理,在被测电动机轴上安装一台小型直流发电机即测速发电机,根据测速发电机的输出电压,间接地获得被测电动机的稳态转速和转速变化规律。
原理:电机转动带动测速发电机转动,测速发电机的转子切割磁力线产生感应电动势,速度越高,感应电动势越大。
特点:动态响应较慢。
使用范围:只能用于电机稳态测量或缓变过程的测量,在电机转速较低时不能使用,因为测速发电机会进入非线性区而产生较大误差。
2、光电数字测速定义:通过转速传感器将光信号变为与转速有关的电信号,从而测量电机转速的一种方法。
转速传感器主要有光电码盘或光栅,它们都能产生与速度相关的脉冲式电信号。
原理:电机带动编码器转动发出高速脉冲,速度越高,脉冲频率越快。
特点:光栅分辨率很高,能够达到较高的测量精度。
测量方式:a、测频法:通过测量标准单位时间内与转速成正比的脉冲数来测定转速,适合于转速较髙时的测量。
b、测周法:通过测量产生一个电脉冲信号(即电机转过固定的角位移)所需要的时间来测定转速,适合于低转速测量。
3、磁电转速传感器测速定义:以磁电感应为基本原理来实现转速测量,属于非接触式转速测量仪表。
原理:磁电式转速传感器由铁芯、磁钢、感应线圈等部件组成的,测量对象转动时,转速传感器的线圈会产生磁力线,齿轮转动会切割磁力线,磁路由于磁阻变化,在感应线圈内产生电动势,转速越快输出的电压也就越大。
特点:抗干扰性很强,输出的信号强,测量范围广。
优点:a、工作维护成本较低,运行过程无需供电;b、运转不需要机械动作,无需润滑;c、结构紧凑、体积小巧、安装使用方便,可以和各种二次仪表搭配使用。
使用范围:可用于表面有缝隙的物体转速测量,有很好的抗干扰性能,能够在烟雾、油气、水汽等环境中工作。
注意:被测电机的转速范围不能超过磁电转速传感器的测速范围,一旦超过测速范围,磁路耗损会过大,使得输出电动势饱和甚至锐减,测量结果不准确。
电动机转速该如何测量1.可以用真尚有科技的转速测量系统要测量圆柱体微小转角,首先要知道被测物的半径,然后测出物体在单位时间内走的距离。
知道了两个参数后就可以求得转动角度。
解决:Px可以测得物体微小变化调试的方式:λ通过软件检查系统安装是否满足测量条件,调节传感器安装位置,调节到最佳测量状态,然后可以开始在线测量。
λ通过软件能进行简单的测量, 并最终求出角度值。
通过增量输出:用户自己将测量结果值进行转换λ通过接收传感器发出脉冲个数,然后换算成距离最终求得转动角度。
最简单的计算增量脉冲的方法是用计数器进行读取,计数器说明:可设置计数与转动周长的对应关系,每个脉冲代表一定长度,例如1个脉冲= 0.01mm,则图1-3所示距离= 92896 * 0.01mm = 928.96mm定制软件:通过软件方式将得到数据进行处理,并最终将结果显示给用户看,能让用户直观的观测到当前测量值。
其他功能可以定制。
2. 前不久在一个网站上找的:可自制一个简单实用的振动式转速计,它是根据物理学上共振原理制成的,测速时并且不会消耗发动机的功率。
振动式转速计由十几根不同长度的钢丝做成。
每根钢丝的自振频率都不同,钢丝越长,自振频率越低;长度越短,自振频率越高。
小发动机工作时,每转一转,活塞上下一次,产生一次振动。
当发动机产生的振动频率和某根钢丝的自振频率相同或成整数的倍数时,这根钢丝就会因共振而开始振动。
使用时,将振动式转速计固定在发动机附近,或直接用底座靠在发动机的气缸头等部位上;只要观察那一根钢丝的振动幅度最大,就可根据该钢丝的刻度测得发动机的转速。
其准确度依钢丝质量、直径大小及钢丝和底座的夹紧程度不同而略有出入,一般为±200转/分。
最好先用标准转速表校准刻度。
钢丝的自振频率和它的直径、自由长度及钢材的弹性有关。
一般钢丝的自振频率f可按下式计算:其中:d 钢丝直径(单位厘米)L 钢丝自由长度(单位厘米)或其中:n 发动机转速(单位转/分)利用上式,可以求出不同直径的钢丝在代表某一转速而产生共振时所需要的自由长度。
电动机的转速测量与监测技术电动机是现代工业中常见的动力设备,其转速的测量与监测对于保证电动机的正常运行和安全性至关重要。
本文将介绍电动机转速的测量原理和常用的转速监测技术。
一、电动机转速测量的原理电动机转速的测量可以通过不同的原理和方法来实现,下面将介绍两种常用的测速原理。
1. 电磁感应原理:电动机中通常会装配一个转子,通过检测转子上装配的齿轮或磁铁与传感器之间的变化,可以间接测量电动机的转速。
传感器可以是霍尔效应传感器、磁敏电阻、光电传感器等,根据不同的测量方式选择合适的传感器。
2. 频率变化原理:利用电动机的转速与输出信号频率之间的关系进行测量。
通过检测输出信号的脉冲数量,可以计算出电动机的转速。
这种方法通常使用旋转变压器或光电编码器。
二、电动机转速监测技术电动机的转速监测是为了实时监测电动机的工作状态和运行质量,以及随时查询故障和异常情况。
下面将介绍两种常用的转速监测技术。
1. 嵌入式监测技术:通过在电动机内部嵌入传感器和监测模块,实现对电动机转速的实时监测和数据采集。
这种技术可以获得高精度的数据,并能够提供丰富的故障诊断信息。
同时,该技术可以与其他监测系统集成,实现远程监测和控制。
2. 无线监测技术:使用无线传感器和通信技术,实现对电动机转速的远程监测。
传感器安装在电动机上,通过无线通信将测量数据传输到监测中心。
这种技术具有灵活性高、安装方便等特点,可以满足对电动机转速监测的实时性和远程性要求。
三、电动机转速测量与监测技术的应用电动机转速测量与监测技术已经广泛应用于各个领域,例如工业生产线、物流设备、船舶、机械制造等。
下面将介绍几个具体的应用案例。
1. 工业生产线:在工业生产线中,电动机的正常运行是保证生产进度和质量的关键。
通过监测电动机的转速,可以及时发现异常情况并进行处理,避免生产故障和停机造成的损失。
2. 物流设备:物流设备中常常使用电动机驱动输送带、提升机等设备。
通过转速测量和监测技术,可以实时监控设备的运行状态,并提前发现设备故障,避免停机和物流中断。
万用表判断电动机的转速和区分绕组的头尾在电机维修的过程中,万用表可以说是一个必备的工具。
通过使用万用表可以判断电机的一些基础参数,比如电动机的转速等。
另外,还可以通过万用表区分电机的绕组头和尾。
万用表的使用万用表是应急电气测量的基本工具。
他们有两个测量端,一个用于测试电流和电压,而另一个则用于测试电阻。
按照不同的用途,万用表的使用方法也会有所不同。
在测试电动机的转速时,需要将万用表的测量端接到电机的相应区域。
如果电动机是三相的,需要将万用表的测量端依次接到每个三相电线上并记录下每个相的电压值。
根据公式 V=IR,将电压值和三相电线的电流值计算出来,并通过这个计算出电动机的转速。
值得注意的是,电机的转速也可以通过安装测速器进行测量。
不过使用万用表可以有效地简化电路测试,也不需要花费额外的费用购买测速器。
电机绕组的头尾区分通过万用表区分电机绕组头尾需要先了解电机绕组的结构。
电机的绕组由两部分组成:定子绕组和转子绕组。
定子绕组是由多个线圈绕在铁芯上形成的,通常是三相的。
而转子绕组则是由一组导线绕在转子上形成的。
电机绕组的头和尾非常重要,因为它们决定了电机的运转方向。
如果当绕组头和尾分别接反,那么电机就会逆转。
在区分绕组头尾时,需要使用万用表做以下步骤:1.找到电机绕组的线圈两端。
2.用导线将两端连接。
3.将测量端点在一个线圈的一个端点,并将另一个测量端点移动到电机的另一个线圈的相对端点上。
4.查看电压的极性变化情况。
如果极性在两个线圈之间变化,那么这个线圈的头和尾就被区分出来了。
通过对电机绕组头尾的正确区分,可以有效地保证电机的正常运转。
如果头尾区分不清,则可能导致电机无法正常启动,或者运转方向相反。
总结在进行电机的维修或者维护工作时,万用表可以起到非常重要的作用。
通过万用表可以判断电动机的转速等基础参数,并且可以通过区分绕组的头尾来保证电机的正常运转。
当然,万用表的使用需要在正确的环境和操作下进行。
电动机工作特性的测定原理
电动机的工作特性是指电动机在不同负载下的转速、负载转矩和电机电流之间的关系。
电动机工作特性的测定可以通过以下原理进行:
1. 转速测定原理:使用转速传感器或测速仪器测量电动机的转速。
常用的转速测定方法包括光电式转速测定、霍尔式转速测定和接触式转速测定等。
2. 负载转矩测定原理:通过测量电动机输出轴或负载轴的扭矩来确定电动机的负载转矩。
常用的负载转矩测定方法包括力传感器测定、压力传感器测定和直接测定等。
3. 电机电流测定原理:使用电流传感器或测电表等仪器测量电动机的电流。
常用的电机电流测定方法包括电流互感器测定、电流放大器测定和直接测定等。
通过以上测定原理,可以获得电动机在不同负载下的工作特性曲线,进而了解电动机的性能和效率。
这些测定结果对于电动机的设计、选择和控制非常重要。
电动机性能实验中的测量误差及处理方法引言:电动机作为重要的动力源之一,其性能的准确测试对于电动机的应用和研究具有重要意义。
然而,在电动机性能实验中,由于各种原因,测量误差常常会导致测试结果的不准确,这给电动机性能的评估和研究带来了一定的困扰。
本文将探讨电动机性能实验中常见的测量误差及其处理方法,以期为电动机实验研究提供一定的参考。
一、电流测量误差及处理方法在电动机实验中,电流是一个重要的参数。
然而,由于电流传感器的精度限制、电缆阻抗和电流的瞬时变化等因素,电流测量常常会出现误差。
对于这一问题,可以采取如下处理方法:1.使用高精度的电流传感器,并校准传感器以提高测量精确度;2.避免使用过长的电缆,以减小电缆阻抗对电流测量的影响;3.采用滤波技术对电流信号进行处理,降低瞬时变化对测量结果的影响。
二、转速测量误差及处理方法转速是电动机性能测试的关键参数之一。
然而,由于测量设备的限制和转子惯量等因素,转速测量误差是常见的问题。
对于这一问题,可以采取如下处理方法:1.使用高精度的转速测量仪器,并校准仪器以提高测量精确度;2.避免使用过长的传感器连接线,以减小传感器信号损失和电磁干扰对测量结果的影响;3.对转速信号进行滤波处理,减少噪声和干扰的影响;4.在实验过程中,采取多次测量并求取平均值的方法,提高测量结果的稳定性。
三、功率测量误差及处理方法功率是评估电动机性能的重要指标,然而功率测量误差是电动机实验中常见的问题。
对于这一问题,可以采取如下处理方法:1.使用高精度的功率测量仪器,并校准仪器以提高测量精确度;2.选用合适的功率传感器,根据电动机额定功率和测量范围,避免传感器的过量测量或测量范围不足的问题;3.避免功率因子和功率波形的变化对测量结果的影响,采用功率因数校正和波形校正技术。
四、温度测量误差及处理方法温度是电动机工作状态的重要指标,但在测量过程中常常会受到环境温度、测量点位置和传感器的热惯性等因素的影响,导致误差的产生。
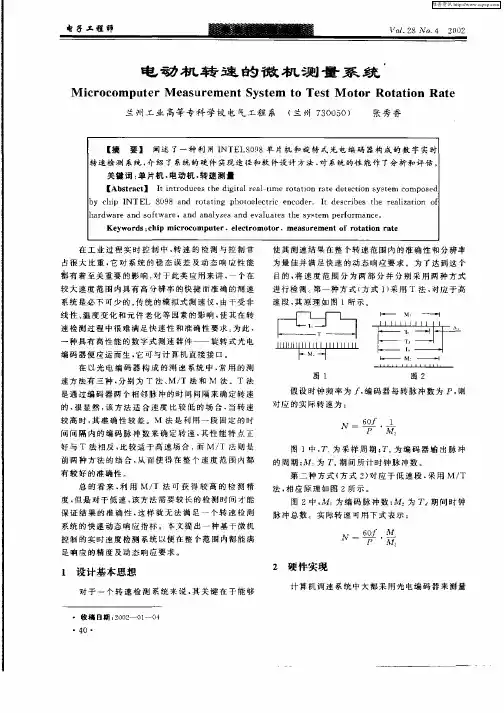
转速测量方法可以分为两类,一类是直接法,即直接观测机械或者电机的机械运动,测量特定时间内机械旋转的圈数,从而测出机械运动的转速;另一类是间接法,即测量由于机械转动导致其他物理量的变化,从这些物理量的变化与转速的关系来得到转速。
同时从测速仪是否与转轴接触又可分为接触式,非接触式。
目前国内外常用的测速方法有光电码盘测速法、霍尔元件测速法、离心式转速表测速法、测速发电机测速法、漏磁测速法、闪光测速法和振动测速法。
1.光电码盘测速法这是通过测出转速信号的频率或周期来测量电机转速的一种无接触测速法。
光电码盘安装在转子端轴上,随着电机的转动,光电码盘也跟着一起转动,如果有一个固定光源照射在码盘上,则可利用光敏元件来接受光,接收到光的次数就是码盘的编码数。
若编码数为l,测量时间为t,测量到的脉冲数为N,则转速n=(N/t*l)*60。
2.霍尔元件测速法利用霍尔开关元件测转速的。
霍尔开关元件内含稳压电路、霍尔电势发生器、放大器、施密特触发器和输出电路。
输出电平与TTL电平兼容,在电机转轴上装一个圆盘,圆盘上装若干对小磁钢,小磁钢越多,分辨率越高,霍尔开关固定在小磁钢附近,当电机转动时,每当一个小磁钢转过霍尔开关,霍尔开关便输出一个脉冲,计算出单位时间的脉冲数,即可确定旋转体的转速。
3.离心式测速法离心式转速表是利用物体旋转时产生的离心力来测量转速的。
当离心式转速表的转轴随被测物体转动时,离心器上的重物在惯性离心力作用下离开轴心,并通过传动系统带动指针回转。
当指针上的弹簧反作用力矩和惯性离心力矩相平衡时,指针停止在偏转后所指示的刻度值处,即为被测转速值。
这就是离心式转速表的原理。
测转速时,转速表的端头要插入电机转轴的中心孔内,转速表的轴要与电机的轴保持同心,否则易响准确读数。
4.测速发电机测转速利用直流发电机的电枢电动势E与发电机的转速成正比的这一关系测量转速。
测转速时,测速发电机连接到被测电机的轴端,将被测电机的机械转速变换为电压信号输出,在输出端接一个刻度以转速为单位的电压表,即可读出转速。

PLC高速计数器测量电机转速的标准程序通过与电动机同轴齿轮齿条变化来测量电动机转速,电动机输出轴与齿轮的传动比=1,齿条数=12,要求测量单位:转/分钟。
主程序:子程序0主程序MAIN程序初始化,PLC上电运行的第一个扫描周期执行一次初始化子程序SBR_0。
用于程序运行的初始设置子程序SBR_0在PLC运行的第一个扫描周期,将用于记录累加数据次数和累加数据的中间变量VB8和VD0置0设置高速计数器HC0的控制字节SMB37,用十六进制表示(16#F8),也可以用二进制表示(2#11111000)。
设置高速计数器HC0工作模式为0,单相计数输入,没有外部控制功能。
设置高速计数器HC0初始值寄存器SMD38为0。
执行HSC指令,将控制字节SMB37、初始值/预置值寄存器(SMD38/SMD42)以及工作模式写入高速计数器HC0。
设定定时中断事件的时间为50ms定时中断事件号10和中断处理程序INT_0建立关联。
允许中断,将定时中断事件和中断处理程序连接中断程序0中断处理程序INT_0中断处理程序每隔50ms扫描刷新一次。
采用整数加法指令,将高速计数器HC0的计数当前值(32位)和累加数据相加一次。
用于数据的累加。
采用整数递增指令,记录累加次数。
执行HSC指令,在这里执行的目的,是将初始值寄存器SMD38(0)再次写入高速计数器HC0,使计数当前值为0,以便下个定时采样。
当累加数据次数等于32次,子程序中网络2中程序执行。
采用除法指令,计算32次的累加数据平均值。
将平均值转换成测量单位:转/分,转换后的数据送入双字VD4。
将平均值转换成字数据,送入字VW10中。
VW10中的数据就是电机速度值。
之所以转换,是因为在程序中一般要求以字的概念存在。
将记录累加数据次数的字节VB6中数据置0。
用于下一次开始时,从新开始累加。
将用于累叫数据的中间变量VD4置0。
电机测速原理
电机测速原理是通过测量电机旋转轴的速度,从而掌握电机运行状态。
测速方法有多种,下面将介绍其中两种常见的测速原理。
1. 电磁感应测速原理:
电磁感应测速原理是利用电磁感应现象来测量电机旋转速度。
当电机转子上的导体通过磁场时,会在导体两端产生感应电动势。
通过测量这个感应电动势的大小,可以得到电机转子的速度。
具体实现中,可在电机定子上固定一个速度传感器,传感器内部包含一个线圈和一个磁铁。
当电机旋转时,磁铁也会跟随转动,产生磁场。
线圈中产生的感应电动势与磁场的变化量成正比,通过测量感应电动势的大小和频率,可以计算出电机的转速。
2. 光电编码器测速原理:
光电编码器是另一种常用的电机测速装置。
它通过光电效应来测量电机转速。
光电编码器由发光二极管和光敏二极管组成。
发光二极管发出一束光,光敏二极管接收到光后产生电信号。
具体实现中,将一个光电编码器安装在电机旋转轴上,编码器上有一个圆盘,圆盘上刻有一系列的凹槽。
当电机旋转时,光电编码器接收到的光强会不断变化。
通过检测光敏二极管产生电信号的频率和变化幅度,可以得到
电机的转速。
通常,一圈圆盘上的凹槽数量已知,因此可以通过计算脉冲信号的频率和圆盘一周的凹槽数量,来确定电机的转速。
这些是电机测速的两种常见原理,通过这些原理可以实现对电机转速的准确测量和监控。
电动机的运行参数监测与分析方法概述:电动机作为现代工业生产中最常见的动力设备,其运行参数的监测与分析对于实现高效稳定的生产至关重要。
本文将介绍电动机的运行参数监测与分析的方法,并探讨其在工业生产中的应用。
一、电动机运行参数的监测方法1. 电流监测方法:通过安装电流传感器,实时监测电动机的电流参数。
电流的变化可以反映电动机的负载情况以及工作效率。
2. 电压监测方法:通过安装电压传感器,实时监测电动机的电压参数。
电压的波动可以反映电动机供电状况以及电源的稳定性。
3. 温度监测方法:通过安装温度传感器,实时监测电动机的温度参数。
温度的变化可以反映电动机的散热情况以及可能存在的过热问题。
4. 转速监测方法:通过安装转速传感器,实时监测电动机的转速参数。
转速的变化可以反映电动机的负载情况以及回转力矩的变化。
二、电动机运行参数的分析方法1. 谱分析法:利用频谱分析仪对电动机运行时的电流、电压等信号进行频谱分析,可以获得电动机的谐波分布情况,从而判断电动机的运行状态和负载状况。
2. 故障诊断法:根据电动机运行参数的实时监测数据,结合故障诊断软件的分析,可以找出电动机存在的故障,如过载、断相、短路等,及时采取相应措施进行修复。
3. 统计分析法:通过对电动机运行参数的长期数据进行统计分析,可以了解电动机的平均负载状况、能耗量等参数,并进行进一步的优化和改进。
4. 效能计算法:通过测量电动机的输入功率和输出功率,并通过计算得出电动机的效率和能耗量,从而评估电动机的工作效率和能源利用情况。
三、电动机运行参数监测与分析方法的应用1. 提高生产效率:通过监测电动机的运行参数,及时发现电动机的故障情况并进行修复,从而保证生产设备的正常运转,提高生产效率。
2. 节约能源:通过分析电动机的运行参数,找出能源浪费的原因,并采取相应的措施,如改进电动机的调速方式、优化负载分配等,实现能源的节约。
3. 预防维护:通过定期监测电动机的运行参数,建立电动机的健康档案,提前预判可能出现的故障,进行定期维护和检修,延长电动机的使用寿命。
一、概述该课程设计是关于直流电动机转速的测量。
转速是电动机极为重要的一个状态参数,一般是指电机转子的每分钟转数,通常用r/min表示。
本次课程设计选用光电测速法,测量电路由光电转换电路,整形电路,晶体振荡电路,分频电路,倍频电路,时序控制电路和计数、译码、驱动、显示电路构成,电机转速的测量范围为600r/min~30000r/min,测量的相对误差<1%并用5位LED数码管显示出相应的电机转速。
本次课设需满足以下设计要求:1根据技术指标,设计各部分电路并确定元器件参数;2. 用5位LED数码管显示出相应的电机转速;3. 画出电路原理图(元器件标准化,电路图要规范化)。
二、方案论证本课程设计是设计电机转速测量系统,采用光电测速方案,将转速信号转化为脉冲信号,然后用数字系统内部的时钟来对脉冲信号的频率进行测量,方案中包括光电转换电路,整形电路,闸门电路,晶体振荡电路,分频电路,倍频电路,控制电路和计数、译码、驱动、显示电路。
原理方框图如图1所示:图1电机转速测量系统原理框图在电动机转轴上安装一个圆盘,在圆盘上打6个均匀小孔。
当电动机旋转时光源通过小孔投射到光敏三极管上,就产生了一序列的脉冲信号,光敏三极管产生的脉冲信号频率与电机转速成正比。
脉冲信号经过整形电路转变成方波,再用二倍频电路使整形后的信号频率变为原来的二倍。
再由晶体振荡电路输出的信号经过215分频电路,产生1Hz的基准信号,再经过10分频,便可产生一个0.1Hz的基准信号,该基准信号用来控制闸门电路,把经过倍频的光电转换后的信号计数并显示出来三、电路设计1.光电转换电路在该部分可以用发光元件作为光的发射部分,可以选择发光二极管作发光元件,接收部分则要选择光敏三级管作为接受部件。
其原理是用光敏三极管接收发光二极管通过小孔发射过来的光信号。
在电机的转轴上安装上已打好6个均匀小孔的圆盘,让发光二极管与光敏三极管通过小孔相对,这样电机每转动一周,光线就会相应通过小孔6次,因为光电转换器受光一次就会产生一个脉冲,所以说电机在每转一周后就会相应的产生了6个脉冲。
电动机的运行参数测量与分析电动机是现代社会中广泛应用的一种电力驱动设备,其运行参数的测量与分析对于电机的性能评估、故障诊断以及系统优化具有重要意义。
本文将从测量方法、常见参数以及参数分析方面进行介绍与阐述。
一、测量方法电动机的运行参数测量通常包括电流、电压、功率、转速及转矩等多个方面的测量。
下面将分别介绍几种常用的测量方法。
1. 电流测量:电流可以通过电动机的电流表直接测量,也可以通过电流互感器、电流变送器等外部装置间接测量。
2. 电压测量:电压可以通过电动机的电压表直接测量,也可以通过电压互感器、电压变送器等外部装置间接测量。
3. 功率测量:功率可以通过电动机的功率表直接测量,也可以通过电压和电流的测量结果计算得出。
4. 转速测量:转速可以通过装置测量,如转速测量仪、霍尔传感器等。
5. 转矩测量:转矩通常可以通过电动机的输出轴上的力传感器或者通过测量电动机输出端的电流得出。
二、常见参数电动机的运行参数通常包括额定功率、额定电压、额定电流、额定频率、功率因数、效率等。
1. 额定功率:电动机在额定工作条件下能够连续输出的功率。
2. 额定电压:电动机在额定工作条件下运行所需的电压。
3. 额定电流:电动机在额定工作条件下运行所需的电流。
4. 额定频率:电动机在额定工作条件下运行所需的电源频率。
5. 功率因数:电动机在运行过程中,有助于将电力转换为机械功率的比例。
6. 效率:电动机输出的实际功率与输入的电力之间的比例。
三、参数分析通过对电动机运行参数的测量和分析,可以得到电动机的性能评估、故障诊断以及系统优化等 valuable 信息。
1. 性能评估:通过测量额定功率和效率等参数,可以评估电动机的性能指标,比如能源利用效率、运行稳定性等。
2. 故障诊断:通过测量电流、电压和转速等参数,可以对电动机的故障进行诊断,如过载、短路、绕组断路等。
3. 系统优化:通过对电动机运行参数的测量与分析,可以提供优化方案,如提高电动机的功率因数、改进系统效率等。
毕业设计(论文)题目:电机转速测量系统设计院(系)光电工程学院专业测控技术与仪器班级100106班姓名叶亚锋学号100106117导师李党娟2014 年 5 月20 日电机转速测量系统设计西安工业大学光电工程学院叶亚锋摘要:电机是电力系统的主要设备,而电机转速是衡量动力系统正常工作的重要的性能指标,因而需要测量电机转速,使它满足人们的各种需求。
在本设计中多次采用施密特触发器,成为电路的主控芯片,控制着信号的定时和锁純。
用三片CD40110BE级联实现电路的计数、译码、数码管的驱动等功能,通过对光电耦合器产生的脉冲数进行统计,并把所得到的计数脉冲转化为电机的转速值,利用施密特触发器完成数器的清零和锁純,计数器计数译码后将信号输送到数码管,动态的显示脉冲数目,最后根据脉冲数目计算电机的转速。
本设计采用的电子元器件简单普遍,线路连接简单,安装调试容易,测量结果精确,具有较高的实用价值。
关键词:光电耦合器;施密特触发器;计数器;数码显示。
Design of motor speed measurement system Abstract: The motor is the main equipment of power system, and the motor speed is an important performance ind ex to measure the power system normal operation, therefore need to speed measuring motor, make it meet the needs of peopl e. The Schmidt trigger multipl e times in the d esign of main circuit, a control signal timing and l ock the key part of pure. Circuit realization of counting, d ecoding, digital tube driver functions with three slice CD40110BE cascad e, statistics through the pulse number on the photoelectric coupl er, and count the pulses to the motor speed value, compl ete number is cl ear and pure use l ock Schmidt flip-fl op, counter after d ecoding the signal transmitted to the the digital tube dynamic display, pulse number, pulse number according to the cal culated motor speed. El ectronic components used in this d esign simpl e and common, simpl e circuit, easy installation, accurate measurement result, and has higher practical value.Keywords:photoelectric coupler;Schmidt trigger;timer;counter;digital display.目录第一章绪论 (4)1.1课题研究的目的和意义 (4)1.2 转速测量在国内外的研究 (4)1.3电机转速的测量方法 (5)1.3.1测频法“M法” (5)1.3.2测周期法“T法” (6)1.3.3 测频测周法“M/T法” (7)第二章转速测量系统的总体方案 (9)2.1 设计任务 (9)2.2设计思路 (9)2.3原理框图 (9)2.4设计的意义 (9)第三章系统硬件电路的设计 (10)3.1 主控芯片的选择 (10)3.2 硬件电路的实现 (10)3.2.1电源电路 (10)3.2.2电机转速脉冲产生电路 (11)3.2.3计数电路 (14)3.2.4控制电路 (16)3.2.5显示电路设计 (19)第四章电路的焊接与调试 (21)4.1电路连接过程的注意事项 (21)4.2电路的调试 (22)4.3转速测量系统的误差分析 (24)第五章总结与展望 (25)5.1 总结 (25)5.2 展望 (25)致谢 (26)参考文献 (27)附录:电机转速测量系统原理图 (28)第一章绪论1.1课题研究的目的和意义电机是将电能从最初的能源形式转换过来的重要桥梁,又是再将大部分电能转换为机械能的装置,电机在电力工业、工矿企业、农业、交通运输业、国防、科学文化及日常生活等方面都是十分重要的设备,在电力工业中,将机械能转换为电能的发电机以及将电网电压升高或降低的变压器,都是电力系统中的关键设备。
电机转速检测报告模板
背景
电机是工业生产和生活中不可或缺的重要设备之一,负责驱动各种设备运行。
在电机正常运行过程中,我们需要对其转速进行检测,以确认其是否符合要求,以及是否存在潜在的故障隐患。
因此,进行电机转速检测就显得尤为重要。
检测设备及工具
•电机
•转速测量仪
•电源
•连接线
•稳定器
•手机或笔记本电脑
检测步骤
1.确定检测位置。
确定电机需要检测的位置,通常情况下会在电机轴承底部或侧面测量。
检测位置需要尽可能靠近叶片。
2.准备检测设备及工具。
将转速测量仪与电源通过连接线连接起来,检查仪器是否正常运行。
如果需要,可以连接稳定器以确保电源稳定。
3.安装转速测量仪。
将转速测量仪安装到电机检测位置上。
4.执行检测。
启动电机,记录转速测量仪显示的数据,并将其保存到手机或笔记本电脑上。
5.分析检测结果。
根据检测结果,可以判断电机的运行情况是否正常,并在必要的时候进行修理或更换。
检测数据记录模板
在进行电机转速检测时,需要记录以下数据:
•电机型号
•检测日期
•检测人员
•检测位置
•检测设备型号
•检测条件(例如:环境温度、电源稳定器型号等)
•检测结果
电机型号检测日期检测人员检测位置检测设备型号检测条件检测结果
Y90S-2 2021-
10-01
张
三
电机
侧面
GOWE转速
测量仪
环境温度25°C,SMT-
100电源稳定器
2980
RPM
YE。