3第三章 曲面网格划分
- 格式:pdf
- 大小:1.38 MB
- 文档页数:46
建筑设计中曲面网格的划分方式及优化策略建筑设计中曲面网格的划分方式及优化策略一、引言建筑设计中,曲面网格的划分是一个关键的步骤,能够影响建筑物外形的流畅性、结构的稳定性以及施工的困难程度。
因此,合理的曲面网格划分方式和优化策略对于建筑设计的成功至关重要。
本文将介绍几种常见的曲面网格划分方式,并讨论一些优化策略。
二、曲面网格划分方式1. 均匀划分均匀划分是一种较为简单直接的划分方式,将曲面分成等大小的小面片。
这种方式适用于形状简单、平面性强的曲面,能够快速构建曲面网格。
然而,在曲面形状复杂或者曲面上存在规律性变化的情况下,均匀划分方式可能无法充分利用网格点,导致网格精度不高。
2. 均匀切割划分均匀切割划分是一种常见的曲面网格划分方式,通过将曲面切割成若干个小块,并在各个小块上采用均匀网格的方式,实现整体的曲面网格。
这种方式提供了更高的网格精度和平滑性,适用于较复杂的曲面形状。
3. 自适应划分自适应划分方式根据曲面上的变化程度来调整网格的密度,以使网格更好地适应曲面的复杂性。
例如,在曲面上的锐角和平面区域附近使用较密的网格,而在曲面上的平滑区域则采用较稀疏的网格。
自适应划分方式能够在保证网格精度的同时,减少网格数量,提高计算效率。
三、曲面网格优化策略1. 网格平滑曲面网格划分后,常常存在网格点之间的不平滑现象。
为了提高网格的平滑性,可以通过一些优化策略进行调整。
例如,使用曲线插值或者曲面拟合等方法,对网格进行局部调整,以消除不平滑部分。
2. 网格剖分在某些需要高精度曲面表达的区域,可以通过网格剖分策略进行优化。
网格剖分是指在曲面局部区域进行重复划分,以提高局部区域的曲面精度。
这种策略常用于建筑物的装饰部分,例如外墙砖面贴装等。
3. 网格调整在曲面网格划分中,边界网格的位置和精度往往是关键问题。
因此,在曲面网格优化中,需要特别关注边界网格的调整。
通过一些算法和方法,可以对边界网格进行调整,以满足设计要求。

三维网格分割的经典方法摘要:本文针对三维网格分割问题,提出一个经典的方法。
该方法基于微分几何和测地距离。
在算法中,将面片类型相同的顶点分割在一起。
测地距离利用顶点之间的最短路径表示,这里可以利用一些经典的算法求最短路径,如Dijkstra 算法。
但是当网格的数量很多时,Dijkstra 算法的效率很低。
因此,此算法避免了在整个网格上应用最短路径算法,在局部网格中求最短路径,从而减少了计算量。
本文在人造物体的三维网格模型以及分子结构中验证了该方法的有效性。
关键字:几何算法 面片分割 测地距离简介3D 物体的三维网格表示法具有很多的应用。
例如,在图像分析中,表示利用深度图像重建的物体表面。
此外,在复杂物体和场景的建模和可视化中也有广泛的应用。
在网格面片的分析中,网格分割已经成为一个关注的问题。
网格分割也就是将网格上相互接近并且具有相似曲率的顶点分成一组。
网格分割在很多方面具有重要的应用。
特征提取,模型匹配等。
Mangan 和Whitaker 提出三维网格分割的分水岭算法。
Razdan 和Bae 扩展了此算法,将基于点元(voxel-based )和分水岭算法相结合,来分割三角网格。
这两种方法在分割中都需要计算整个曲率,然后在局部曲率最小处建立初始分割。
然而,在某些物体中,局部曲率的最小值是很难确定的。
因此,在这里提出一个初始分割的新方法。
在该算法中,应用基于面片的类型信息的网格区域增长方法,对顶点进行初始分割。
利用高斯曲率和平均曲率对顶点所在的面片进行分类。
这里利用离散微分几何计算高斯曲率和平均曲率。
通过本文提出的新方法来求得测地距离。
文章结构:第二部分,介绍网格面片的曲率分析和面片分类。
第三部分,详述本文的分割算法。
第四部分,实验以及其分割结果。
第五部分,结论。
2 面片分析在面片分析中,首先计算高斯曲率和平均曲率,然后利用它们进行面片分类。
顶点P 0的高斯曲率K 的计算公式如下:,A K θρ∆= ,∑-=∆i i 2θπθ ∑=ii A A , A 为相邻三角形T i ( i =1,2,3,…)的面积总和。

第二篇预处理技术第三章 GAMBIT网格划分基础GAMBIT软件是Fluent 公司提供的前处理器软件,它包含功能较强的几何建模能力和强大的网格划分工具,可以划分出包含边界层等CFD特殊要求的高质量的网格。
GAMBIT 可以生成FLUENT6、FLUENT5.5、FIDAP、POLYFLOW等求解器所需要的网格。
使用Gambit 软件,将可大大缩短用户在CFD应用过程中建立几何模型和流场以及划分网格所需要的时间。
用户可以直接使用Gambit软件建立复杂的实体模型,也可以从主流的CAD/CAE系统中直接读入数据。
Gambit软件高度自动化,可生成包括结构和非结构化的网格,也可以生成多种类型组成的混合网格。
如果你熟练掌握了GAMBIT, 那么在CFD应用中你将如虎添翼。
让我们赶紧进入GAMBIT的学习吧。
3.1 对连续场的离散化处理现阶段对非定常(完全)N-S方程的直接数值求解往往受到计算机运行速度和内存大小的限制尚不现实,而且工程上对瞬时流场也不感兴趣,因此在实际应用中一般是从简化的数学模型出发,并要在简化模型的复杂程度和可处理的几何外形的复杂程度之间作出某种权衡,要求对模型的合适程度和计算的可行性(物理上和几何上)作出判断。
目前计算流体力学完全可以模拟具有复杂几何外形的简单物理问题或者模拟具有简单几何外形的复杂物理问题,而不能完全模拟既具有几何复杂性又具有物理复杂性的问题,对此仍在进一步发展中。
完全N-S方程按时间平均并按从高到低的层次可简化成雷诺平均N-S方程、边界层方程、无粘非线性方程(如Euler方程、位势方程、跨音速小扰动方程)、无粘线性方程(如Lap1ace方程)等。
从数值求解上述控制方程的进程来看,20世纪60年代解决了无粘线性方程的求解,已能用无粘线性方程模拟相当复杂外形的小攻角绕流,并有大量的实用软件;20世纪70年代主要集中于无粘非线性全位势方程和Eu1er方程的求解,已能用于模拟许多复杂外形的亚、跨、超音速绕流;20世纪80年代较集中于求解雷诺平均N-S方程及其它近似的N-S方程,着重解决定常问题,已取得了丰硕的成果,并趋于成熟;20世纪90年代开始了非定常粘性流场模拟的新局面,并且它已逐渐成为计算流体力学的发展主流。
以网格曲线为骨架,蒙上自由曲面生成的曲面称之为网格曲面。
网格曲线是由特征线组成横竖相交线。
(1)网格面的生成思路:首先构造曲面的特征网格线确定曲面的初始骨架形状。
然后用自由曲面插值特征网格线生成曲面。
(2)特征网格线可以是曲面边界线或曲面截面线等等。
由于一组截面线只能反应一个方向的变化趋势,还可以引入另一组截面线来限定另一个方向的变化,这形成一个网格骨架,控制住两方向(U和V两个方向)的变化趋势如图,使特征网格线基本上反映出设计者想要的曲面形状,在此基础上插值网格骨架生成的曲面必然将满足设计者的要求。
(3)可以生成封闭的网格面。
注意,此时拾取U向、V向的曲线必须从靠近曲线端点的位置拾取,否则封闭网格面失败。
(1)单击“造型”,指向“曲面生成”,单击“网格面”,或者单击按钮。
(2)拾取空间曲线为U向截面线,单击鼠标右键结束。
(3)拾取空间曲线为V向截面线,单击鼠标右键结束,完成操作。
注意
(1)每一组曲线都必须按其方位顺序拾取,而且曲线的方向必须保持一致。
曲线的方向与放样面功能中一样,由拾取点的位置来确定曲线的起点。
(2)拾取的每条U向曲线与所有V向曲线都必须有交点。
(3)拾取的曲线应当是光滑曲线。
(4)对特征网格线有以下要求:网格曲线组成网状四边形网格,规则四边网格与不规则四边网格均可。
插值区域是四条边界曲线围成的(如下图a、b),不允许有三边域、五边域和多边域(如下图c)。
希望对你有帮助!。
任意曲面的三角形网格划分任意曲面的三角形网格划分是基于三角形网格生成算法实现的。
这些算法通常采用参数化方法表示曲面,并使用分割线段、迭代细分等方式将曲面划分为许多小的三角形网格。
具体实现过程中,可以采用不同的三角形网格生成算法,如Loop subdivision、Butterfly subdivision等。
这些算法在处理复杂曲面时具有不同的特点和适用范围。
任意曲面的三角形网格划分的优点主要表现在以下几个方面。
三角形网格结构清晰,易于理解和实现。
这种网格划分操作简单,可快速生成并处理大量网格数据。
三角形网格具有广泛的适用范围,可以适用于各种不同形状和性质的曲面。
任意曲面的三角形网格划分在计算机图形学、几何计算和可视化等领域有着广泛的应用。
在计算机图形学中,三角形网格是构建复杂三维模型的基础,也是进行渲染、动画等操作的基础。
在几何计算中,三角形网格可用于表面重建、形状匹配、有限元分析等任务。
在可视化领域,三角形网格可以用于生成高质量的渲染图像和动画,也可用于科学计算结果的可视化。
在使用任意曲面的三角形网格划分时,需要注意以下问题。
由于这种网格生成算法的计算量较大,因此需要优化算法以提高生成效率。
网格生成过程中需要存储大量的网格数据,因此需要合理组织数据结构以减少存储需求。
实现复杂度较高,需要仔细设计算法和数据结构以避免错误和漏洞。
任意曲面的三角形网格划分是一种非常重要的技术,在计算机图形学、几何计算和可视化等领域有着广泛的应用。
通过深入了解这种网格划分的原理和优点,掌握其应用场景及注意事项,我们可以更好地利用这种技术来处理和计算各种不同形状和性质的曲面。
曲面重构是一种从几何形状中提取特征并生成新的几何表示的技术,在计算机图形学、计算机视觉、生物医学工程等领域具有广泛的应用。
三角形网格是一种常见的曲面表示形式,具有灵活性和高效性,因此成为曲面重构领域的重要研究对象。
本文旨在探讨三角形网格上曲面重构技术的现状、研究方法、研究成果及未来发展方向。
HyperMesh之网格划分CAE软件在导入CAD几何模型的时候经常会遇到这样几种情况。
一、CAE软件导入几何数模时发生错误,无法导入。
这种问题可能是由于版本的限制问题,例如HyperMesh5.0不能直接导入UG18的prt文件,但5.1就可以了。
5.*不能直接导入pro/e 的数据,但6.0就可以了。
这种问题比较好解决,用CAD软件把这些几何用iges格式输出处理一下就可以了。
但这种问题也可能是几何数模中存在严重错误所致,这就需要修改模型了。
二、导入几何模型后发现有些曲面无法导入,这样模型就会缺少一些比较重要的面,或者曲面存在缝隙、重叠、错位等缺陷,对较复杂的模型这种问题是经常性的。
边界错位经常引起网格扭曲,导致单元质量不高,求解精度差。
三、导入的模型很完整,没有错误。
但是由于CAE分析和CAD设计的思想不同,会产生一些两难的问题。
CAD设计主要是为生产服务的,模型中通常会包含某些细微特征,例如曲面和边的倒圆,小孔。
进行分析时如果要准确模拟这些特征,需要用到很多小单元,导致求解时间过长。
上面第一种情况不是我想讨论的内容,第二种和第三种情况则比较复杂,因为在这两种情况下,一些在前处理方面号称自动化程度高的软件,如Ansys、Marc、Patran等都会很郁闷。
就算网格能划分出来,质量怎么保证呢?毕竟我们对计算结果的精度和计算过程的费用是有要求的。
那么怎么办?一种办法是在做网格的时候忽略这些问题,比如说遇到缺少曲面,用户可以自己设法在CAE 中做一个,毕竟简单的CAD工具还是有的。
但也只能对简单的曲面。
另外一种办法就是几何清理,不幸的是,据我所知,目前只有两种软件可以做到,HyperMesh 和I-deas,另外我注意到I-deas的帮助里提到她的几何清理功能使用了HyperMesh的专利。
关于HyperMesh的几何清理,基础内容请参考Hypermesh基础培训Day 1部分的第三章,培训材料的中文版我即将发布。
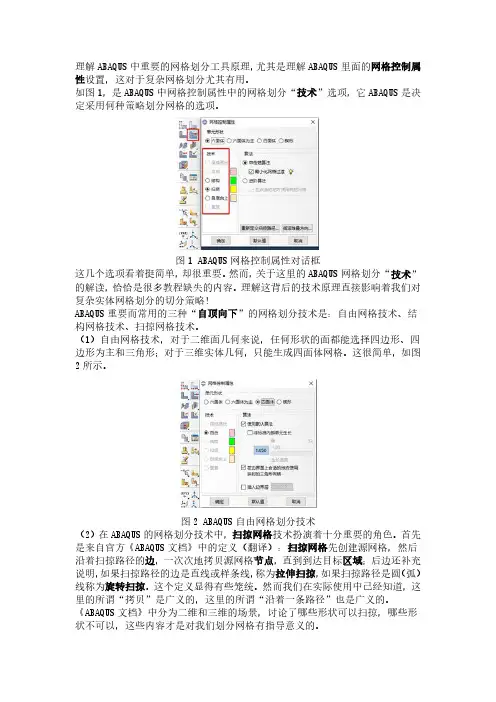
理解ABAQUS中重要的网格划分工具原理,尤其是理解ABAQUS里面的网格控制属性设置,这对于复杂网格划分尤其有用。
如图1,是ABAQUS中网格控制属性中的网格划分“技术”选项,它ABAQUS是决定采用何种策略划分网格的选项。
图1 ABAQUS网格控制属性对话框这几个选项看着挺简单,却很重要。
然而,关于这里的ABAQUS网格划分“技术”的解读,恰恰是很多教程缺失的内容。
理解这背后的技术原理直接影响着我们对复杂实体网格划分的切分策略!ABAQUS重要而常用的三种“自顶向下”的网格划分技术是:自由网格技术、结构网格技术、扫掠网格技术。
(1)自由网格技术,对于二维面几何来说,任何形状的面都能选择四边形、四边形为主和三角形;对于三维实体几何,只能生成四面体网格。
这很简单,如图2所示。
图2 ABAQUS自由网格划分技术(2)在ABAQUS的网格划分技术中,扫掠网格技术扮演着十分重要的角色。
首先是来自官方《ABAQUS文档》中的定义(翻译):扫掠网格先创建源网格,然后沿着扫掠路径的边,一次次地拷贝源网格节点,直到到达目标区域;后边还补充说明,如果扫掠路径的边是直线或样条线,称为拉伸扫掠,如果扫掠路径是圆(弧)线称为旋转扫掠。
这个定义显得有些笼统。
然而我们在实际使用中已经知道,这里的所谓“拷贝”是广义的,这里的所谓“沿着一条路径”也是广义的。
《ABAQUS文档》中分为二维和三维的场景,讨论了哪些形状可以扫掠,哪些形状不可以,这些内容才是对我们划分网格有指导意义的。
注意一个重要的要求是:对三维实体,目标面必须是单一的面。
这里我们引用ABAQUS官方文档的图例简单解释,如图3,图左边可以,而右边不行。
图3 ABAQUS扫掠网格的源面和目标面然而上述这个事实却不是针对曲面网格的,针对曲面网格必须是四边形才能做扫掠网格(并且不管四边形的边是直边还是曲边);而曲面网格对划分结构网格的几何要求反而放得更松一些,实际上,只要没有孔,几乎所有的连续面都可以是结构网格,有孔也没关系,做一下切分就可以。
第三章曲面网格划分本章介绍2D网格的划分方法。
主要包括3部分内容:划分三角形网格:对曲面指定线性或者2次三角形单元;曲面网格划分器:对曲面进行网格划分,允许用户进入【Surface Meshing】(曲面网格划分)工作台;高级曲面划分器:曲面进行网格划分,允许用户进入【Advanced Surface Meshing】(高级曲面网格划分)工作台。
3.1 进入曲面网格划分工作台本节说明如何进入曲面网格划分工作台,有两个方法:●通过生成新的网格零件(使用曲面网格划分器的功能);●编辑已有的网格零件。
3.1.1 生成网格零件打开文件Sample06.CATAnalysis。
(1)点击【Meshing Methods】(网格划分方法)工具栏内的【Surface Mesher】(曲面网格划分器)按钮,如图3-1所示。
图3-1【Meshing Methods】(网格划分方法)工具栏(2)选择要划分网格的几何图形,如图3-2所示。
选中几何图形后,弹出【Global Parameters】(全局网格参数)对话框,如图3-3所示。
图3-2选择要划分网格的几何图形图3-3 【Global Parameters】(全局网格参数)对话框下面说明【Global Parameters】(全局网格参数)对话框内各参数的含义:●【Mesh】(网格)选项卡:⏹【Shape】(形状):允许用户定义划分曲面网格的形状:三角形或者四边形。
⏹【Type】(类型):允许用户定义【Linear】(线性)或者【Parabolic】(二次单元)。
注意!显示出的选项和选择的【Shape】(形状)有关。
●【Triangle Method】(三角形)网格按钮:⏹【Mesh size】(网格尺寸):指定网格全局尺寸。
⏹【Absolute sag】(绝对垂度):网格与几何形状之间最大的差值,如图3-4所示。
⏹【Relative sag】(相对垂度):绝对垂度值与局部网格棱边长度的比值。
曲线和曲面的网格法9.1 简介曲线和曲面在无论是在结构化的网格生成法还是在非结构化的网格生成法中都是非常普遍的几何体。
在网格中曲线看作是二维区域或曲面的边界,或者是三维模块的边缘;曲面则出现在三维区域或模块的边界和表面。
曲线上的网格划分的主要目的是为二维平面区域或曲面的贴体网格生成元提供边界数据。
类似的,曲面的网格划分主要用来在三维区域或模块的边界上建立网格,为网格法提供边界数据。
在结构化的观念中,曲面上的网格构造包括以下几个方面:曲面块集合,每个曲面块的参数说明,以及曲面块边界上的一维曲线的网格构造(为曲面网格生成元提供边界条件)。
实际上,为了简洁和保持曲面网格法和实体几何直观上的一致性,网格通常在二维参数平面中构造,然后再映射到原始的曲面块上。
因此,曲面网格生成的过程可以分为以下三步:前期的映射,网格生成,后期映射。
前期映射是把曲面块的表示由三维实体域转换为二维参数域。
一旦前期映射完成后,就在参数空间中划分网格,然后再映射回实体空间(后期映射)。
曲面块被划分成曲边三角形或四边形,分别有三条或四条边界。
相应的参数域可能也是由曲线围成的三角形状或四边形状。
后期将参数域变换成实体域由调整的插值决定,具体的要看曲面特征的变化。
参数域的网格划分和平面中介绍的一样,有代数法,微分法,变分法。
然而,这些方法需要根据曲面的必要特征加以调整,按照曲面二次型来表示,以满足曲面网格的一些性质。
这章我们回顾以前的曲线和曲面的网格生成法。
9.2 曲线上的网格曲线上的网格划分方法规定方面和分析方面都是最简单的。
这些方法为曲面网格法提供了一些参考。
这部分我们讨论一些普遍的网格划分的方法。
9.2.1 曲线上网格的规定N维空间的曲线用一个光滑的、非奇异的向量值函数表示,自变量区间为标准化的[0,1]:由参数函数表示的曲线标记为。
利用(9.1)所示的变换,我们可以把区间[0,1]上的网格节点映射成曲线上的离散网格,例如,网格点为,其中但是,为了构造具有更好性质的网格,我们需要引进一个控制工具。
基于曲面拟合的复杂自由曲面网格划分陈礼杰;吴慧;李铁瑞;高博青【摘要】为了实现复杂自由曲面的建筑网格划分,将复杂自由曲面拟合成1个曲面,并利用映射法进行网格划分.首先提出基于非均匀有理B样条(NURBS)的线面求交和基于NURBS的面面求交2种方法,获得复杂自由曲面的N×M点云;将N×M点云作为控制点构造NURBS曲面,然后把修剪后的NURBS曲面边界按给定数目或给定长度划分,连接参数域上的边界节点后得到参数域网格,将其映射回空间曲面.对边界处网格进行投影处理以减少曲面拟合出现的边界褶皱及内缩问题.采用加密点阵技术减小曲面拟合的误差.研究结果表明:与多曲面网格划分方法相比,采用曲面拟合及映射法能够得到线条流畅、大小基本一致的网格,具有良好的建筑美学效果.【期刊名称】《中南大学学报(自然科学版)》【年(卷),期】2018(049)007【总页数】8页(P1718-1725)【关键词】非均匀有理B样条(NURBS);复杂自由曲面;曲面拟合;映射法;网格划分【作者】陈礼杰;吴慧;李铁瑞;高博青【作者单位】浙江大学建筑工程学院,浙江杭州,310058;浙江财经大学公共管理学院,浙江杭州,310018;浙江大学建筑工程学院,浙江杭州,310058;浙江大学建筑工程学院,浙江杭州,310058【正文语种】中文【中图分类】TU393.3随着计算机科学技术的进步、建筑施工工艺的发展和人们建筑审美水平的提高,自由曲面结构以其优美的造型越来越多地出现在人们的视野当中。
“自由曲面”指无法用单个或几个解析函数表达的曲面,也可理解为那些明显区别于传统建筑造型的曲面[1]。
由于解析曲面具有一定的周期性或规律性,其网格划分比较方便。
而自由曲面的不规则性使传统的网格划分方法难以适用于自由曲面结构。
因此,如何在自由曲面上生成线条流畅、大小基本一致的网格,是空间结构领域的热点和难题[2]。
网格划分起源于有限元领域[3],常用的方法有Delaunay法[4]、波前法[5]、映射法[6]等。
第3章⽹格划分技术及技巧.第3章⽹格划分技术及技巧创建⼏何模型后,必须⽣成有限元模型才能分析计算,⽣成有限元模型的⽅法就是对⼏何模型进⾏⽹格划分,⽹格划分主要过程包括三个步骤:⑴定义单元属性单元属性包括单元类型、实常数、材料特性、单元坐标系和截⾯号等。
⑵定义⽹格控制选项★对⼏何图素边界划分⽹格的⼤⼩和数⽬进⾏设置;★没有固定的⽹格密度可供参考;★可通过评估结果来评价⽹格的密度是否合理。
⑶⽣成⽹格★执⾏⽹格划分,⽣成有限元模型;★可清除已经⽣成的⽹格并重新划分;★局部进⾏细化。
3.1 定义单元属性3.1.1 单元类型1. 定义单元类型命令:ET, ITYPE, Ename, KOP1, KOP2, KOP3, KOP4, KOP5, KOP6, INOPRITYPE---⽤户定义的单元类型的参考号。
Ename---ANSYS单元库中给定的单元名或编号,它由⼀个类别前缀和惟⼀的编号组成,类别前缀可以省略,⽽仅使⽤单元编号。
KOP1~KOP6---单元描述选项,此值在单元库中有明确的定义,可参考单元⼿册。
也可通过命令KEYOPT进⾏设置。
INOPR---如果此值为1则不输出该类单元的所有结果。
例如:et,1,link8 !定义LINK8单元,其参考号为1;也可⽤ET,1,8定义et,3,beam4 !定义BEAM4单元,其参考号为3;也可⽤ET,3,4定义2. 单元类型的KEYOPT命令:KEYOPT,ITYPE,KNUM,V ALUEITYPE---由ET命令定义的单元类型参考号。
KNUM---要定义的KEYOPT顺序号。
V ALUE---KEYOPT值。
该命令可在定义单元类型后,分别设置各类单元的KEYOPT参数。
例如:et,1,beam4 !定义BEAM4单元的参考号为1et,3,beam189 !定义BEAM189单元的参考号为3keyopt,1,2,1 !BEAM4单元考虑应⼒刚度时关闭⼀致切线刚度矩阵keyopt,3,1,1 !考虑BEAM189的第7个⾃由度,即翘曲⾃由度!当然这些参数也可在ET命令中⼀并定义,如上述四条命令与下列两条命令等效:et,1,beam4,,1et,3,beam189,13. ⾃由度集命令:DOF,Lab1,Lab2,Lab3,Lab4,Lab5,Lab6,Lab7,Lab8,Lab9,Lab104. 改变单元类型命令:ETCHG,Cnv5. 单元类型的删除与列表删除命令:ETDELE,ITYP1,ITYP2,INC列表命令:ETLIST,ITYP1,ITYP2,INC3.1.2 实常数1. 定义实常数命令:R,NSET,R1,R2,R3,R4,R5,R6续:RMORE,R7,R8,R9,R10,R11,R12NSET---实常数组号(任意),如果与既有组号相同,则覆盖既有组号定义的实常数。
第三章 曲面网格划分本章介绍2D网格的划分方法。
主要包括3部分内容:划分三角形网格:对曲面指定线性或者2次三角形单元;曲面网格划分器:对曲面进行网格划分,允许用户进入【Surface Meshing】(曲面网格划分)工作台;高级曲面划分器:曲面进行网格划分,允许用户进入【Advanced Surface Meshing】(高级曲面网格划分)工作台。
3.1 进入曲面网格划分工作台本节说明如何进入曲面网格划分工作台,有两个方法:●通过生成新的网格零件(使用曲面网格划分器的功能);●编辑已有的网格零件。
3.1.1 生成网格零件打开文件Sample06.CATAnalysis。
(1) 点击【Meshing Methods】(网格划分方法)工具栏内的【Surface Mesher】(曲面网格划分器)按钮,如图3-1所示。
图3-1【Meshing Methods】(网格划分方法)工具栏(2) 选择要划分网格的几何图形,如图3-2所示。
选中几何图形后,弹出【Global Parameters】(全局网格参数)对话框,如图3-3所示。
图3-2选择要划分网格的几何图形图3-3 【Global Parameters】(全局网格参数)对话框下面说明【Global Parameters】(全局网格参数)对话框内各参数的含义:●【Mesh】(网格)选项卡:⏹【Shape】(形状):允许用户定义划分曲面网格的形状:三角形或者四边形。
⏹【Type】(类型):允许用户定义【Linear】(线性)或者【Parabolic】(二次单元)。
注意!显示出的选项和选择的【Shape】(形状)有关。
●【Triangle Method】(三角形)网格按钮:⏹【Mesh size】(网格尺寸):指定网格全局尺寸。
⏹【Absolute sag】(绝对垂度):网格与几何形状之间最大的差值,如图3-4所示。
⏹【Relative sag】(相对垂度):绝对垂度值与局部网格棱边长度的比值。
图3-4绝对垂度含义注意!绝对垂度和相对垂度可以改变局部网格棱边的长度。
可以同时定义绝对垂度和相对垂度,系统将使用两个值中控制严格的一个。
⏹【Min size】(最小值):网格尺寸的最小值。
只有当使用相对垂度或者绝对垂度时,该选项才被激活。
⏹【Automatic mesh capture】(自动网格捕捉):当该选项激活时,对于所有的约束元素(只有棱边,内部棱边,外部棱边),或者约束变化之后,网格捕捉将动态执行捕捉。
用户不必依次选择每个约束。
注意到可以定义捕捉公差值,用户可以决定是否对相邻的棱边强制增加一个限值,自动捕捉使用精简功能自动执行。
从几何形状上说,网格是从同一个CATAnalysis有限元文件中的网格零件中捕捉。
注意!只能捕捉已经更新后的网格零件。
⏹【Tolerance】(公差):网格捕捉的最大距离。
⏹【Mesh Part Selection】(网格零件选择)按钮:执行选择网格过滤功能。
●【Quadrangle Method】(四边形网格方法):⏹【Mesh size】(网格尺寸):指定网格全局尺寸。
⏹【Default method】(默认方法):允许用户选择网格划分方法应用到每次网格划分操作中。
如果选中该选项,则程序忽略【Mesh size】(网格尺寸)参数。
选中【Defaultmethod】(默认方法)选项后,对话框该部分显示有变化,会显示一个下拉列表框,如图3-5所示。
图3-5 选中【Default method】(默认方法)选项选中该选项后,可以进行下面的方法:◆【Mapped free mesh】(映射自由网格):采用映射自由网格划分方法。
◆【Minimal mesh】(最小网格):采用最小网格划分方法。
◆【Automatic mesh capture】(自动网格捕捉):激活该选项后,当该选项激活时,对于所有的约束元素(只有棱边,内部棱边,外部棱边),或者约束变化之后,网格捕捉将动态执行捕捉。
用户不必依次选择每个约束。
注意到可以定义捕捉公差值,用户可以决定是否对相邻的棱边强制增加一个限值。
自动捕捉使用精简功能自动执行。
从几何形状上说,网格是从同一个CATAnalysis有限元文件中的网格零件中捕捉。
注意!只能捕捉已经更新后的网格零件。
⏹【Tolerance】(公差):网格捕捉的最大距离。
⏹【Mesh Part Selection】(网格零件选择)按钮:执行选择网格过滤功能。
●【Geometry】(几何形状选项卡)⏹【Constraint sag】(控制垂度):在沿曲面棱边方向创建控制,避免在棱边方向创建单元(单元的垂度将高于指定的值)。
这项设置并不能保证整个网格划分过程均考虑垂度值,但会帮助生成控制。
对于给定的网格尺寸,垂度值越小,创建的控制数量越多,反之则反之。
下面举例进行说明:当垂度值太高时,棱边未被控制,如图3-6所示的棱边。
(a)几何图形(b)划分的网格图3-6 棱边未被控制垂度值足够低时,棱边被控制,如图3-7所示的棱边。
(a)几何图形(b)划分的网格图3-7 棱边被控制⏹【Constraints independent from mesh size】(控制与网格尺寸独立):如果本选项未被激活,【Mesh size】(网格尺寸)数值栏内定义的值将在形貌分组过程中作为参考值进行考虑。
如果激活本选项,用户要自己再定义一个参考值。
⏹【Constraints ref size】(控制参考尺寸):允许用户定义一个参考值。
◆将定义值设置未和网格尺寸值相同。
◆如果用户修改参考值,结果可能不可预测。
(所以该选项形同虚设!)⏹【Add sharp edges】(添加尖角棱边):计算轮廓上两条相切元素间的角度。
⏹【Min holes size】(最小孔尺寸):设置自动删除孔的直径。
⏹【Offset】(偏移值):根据几何形状简化和网格划分两个因素确定的偏移值。
◆【Automatic curve capture】(自动曲线捕捉):当本选项激活时,激活该选项后,当该选项激活时,对于所有的约束元素(只有棱边,内部棱边,外部棱边),或者约束变化之后,网格捕捉将动态执行捕捉。
用户不必依次选择每个约束。
注意到可以定义捕捉公差值,用户可以决定是否对相邻的棱边强制增加一个限值。
自动捕捉使用精简功能自动执行。
从几何形状上说,网格是从同一个CATAnalysis有限元文件中的网格零件中捕捉。
注意!只能捕捉已经更新后的网格零件。
⏹【Tolerance】(公差):网格捕捉的最大距离。
⏹【Mesh Part Selection】(网格零件选择)按钮:执行选择网格过滤功能。
(3) 在【Global Parameters】(全局参数)对话框内定义合适的全局参数。
(4) 点击对话框内的【确定】按钮。
显示的几何形状如图3-8所示。
图3-8 定义网格尺寸后的几何形状同时,在左边模型树【Nodes and Elements】(节点和单元)组下面显示新的网格元素【Surface Mesh.2】,如图3-9所示。
图3-9 模型树显示新的网格元素【Surface Mesh.2】注意!用户进入【Surface Mesher】(曲面网格划分器)工作台后。
可以执行下面的操作:a.在任何时候激活全局参数定义;b.定义曲面网格划分器的局部参数;c.执行网格划分操作;d.执行手动修改;e.任何时候离开【Surface Mesher】(曲面网格划分器)工作台。
3.1.2 编辑网格零件打开零件Sample06.CATAnalysis。
零件的模型树显示如图3-10所示。
(1) 更新【Surface Mesh.1】网格零件。
右击模型树上的【Surface Mesh.1】,在弹出的右键快捷菜单中选择【Update Mesh】(更新网格)选项,如图3-11所示。
程序将执行网格划分功能。
(2) 双击模型树上的【Surface Mesh.1】,弹出【Global Parameters】(全局参数)对话框,此时可以对全局参数进行修改。
(3) 修改参数后,点击【Global Parameters】(全局参数)对话框内的【确定】按钮,关闭对话框。
注意!用户进入【Surface Mesher】(曲面网格划分器)工作台后。
可以执行下面的操作:a.在任何时候激活全局参数定义;b.定义曲面网格划分器的局部参数;c.执行网格划分操作;d.执行手动修改;e.任何时候离开【Surface Mesher】(曲面网格划分器)工作台。
图3-10 零件的模型树图3-11选择【Update Mesh】(更新网格)选项3.2 曲面网格划分器的局部参数定义3.2.1 忽略小孔定义本小节说明如何定义在划分网格时想忽略的几何形状上的小孔。
(1) 打开文件Sample03.CATAnalysis。
(2) 进入【Surface Mesher】(曲面网格划分器)工作台。
具体方法是在【Advanced Meshing Tools】(高级网格划分工具)工作台内点击【Surface Mesher】(曲面网格划分器)按钮,选择要划分网格的几何图形。
选中几何图形后,弹出【Global Parameters】(全局网格参数)对话框。
在对话框内点击【OK】(确定)按钮,关闭对话框,就进入【Surface Mesher】(曲面网格划分器)工作台。
(3) 点击【Local Specifications】(局部参数定义)工具栏内的【Boundary Simplifications】(边界简化)按钮,如图3-10所示。
弹出【Hole Suppression】(孔抑制)对话框,如图3-11所示。
图3-10【Local Specifications】(局部参数定义)工具栏图3-11 【Hole Suppression】(孔抑制)对话框●【Support】(支撑):允许用户定义在网格划分过程中想忽略的孔或者想考虑进来的孔。
注意!可以选择多个孔。
●【Mode】(模式):用户定义选择的孔是忽略还是要考虑进来。
●【Activate】(激活):划分网格时考虑用户定义选择的孔。
●【Inactivate】(锁定):划分网格时忽略用户定义选择的孔。
●【Browse】(浏览):⏹【Auto Focus】(自动聚焦):对激活的孔进行缩放。
⏹【Diameter】(直径):提供用户所选孔的直径值。
(4) 在几何图形上选择一个孔,如图3-12所示。
(5) 在【Mode】(模式)下拉列表框内选择【Inactivate】(锁定)选项。
(6) 点击对话框内的【确定】按钮,关闭对话框。
几何图形上选择的孔将亮显为蓝色,如图3-13所示,这些孔在划分网格时将忽略。
图3-12选择一个孔图3-13 选择的孔亮显在左边的模型树上【Surface Mesh.1】网格零件下方出现一个新的元素【Suppress Hole.1】,属于【Geometry Specifications.1】,如图3-14所示。