能力风暴仿真机器人培训PPT课件
- 格式:pptx
- 大小:1.61 MB
- 文档页数:14
目录第一章欢迎进入个人机器人时代................ 错误!未定义书签。
. 个人机器人时代........................ 错误!未定义书签。
. 在学校应用能力风暴个人机器人.......... 错误!未定义书签。
第二章让你的个人机器人动起来................ 错误!未定义书签。
. 打开包装.............................. 错误!未定义书签。
. 了解能力风暴个人机器人................ 错误!未定义书签。
. 检测能力风暴.......................... 错误!未定义书签。
. 连接能力风暴.......................... 错误!未定义书签。
. 使用JC编程环境........................ 错误!未定义书签。
. 让能力风暴跳舞........................ 错误!未定义书签。
第三章感觉、大脑与驱动器.................... 错误!未定义书签。
. 个人机器人的三大要素.................. 错误!未定义书签。
. 能力风暴的传感器及其处理电路.......... 错误!未定义书签。
碰撞传感器......................... 错误!未定义书签。
红外传感器......................... 错误!未定义书签。
光敏传感器......................... 错误!未定义书签。
麦克风............................. 错误!未定义书签。
光电编码器......................... 错误!未定义书签。
其他传感器......................... 错误!未定义书签。
. 能力风暴的计算机硬件.................. 错误!未定义书签。

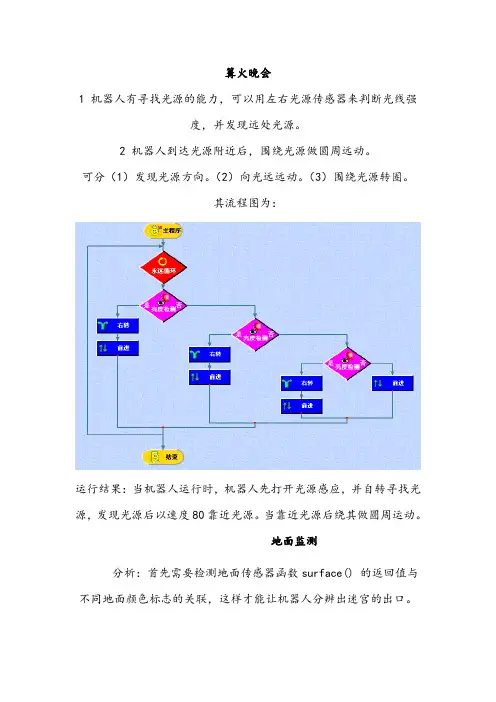
篝火晚会1 机器人有寻找光源的能力,可以用左右光源传感器来判断光线强度,并发现远处光源。
2 机器人到达光源附近后,围绕光源做圆周远动。
可分(1)发现光源方向。
(2)向光远远动。
(3)围绕光源转圈。
其流程图为:运行结果:当机器人运行时,机器人先打开光源感应,并自转寻找光源,发现光源后以速度80靠近光源。
当靠近光源后绕其做圆周运动。
地面监测分析:首先需要检测地面传感器函数surface() 的返回值与不同地面颜色标志的关联,这样才能让机器人分辨出迷宫的出口。
一般出现的地面标志圆圈颜色有三种.在迷宫中的行走模式可采用沿墙走。
沿墙走机器人可以左手走(右手走)。
左手(右手走)走是指机器人始终沿着左边(右边)的墙壁行走,一直走结束。
该方法要求机器人能实现沿着墙壁前进,当拐弯或是门口时,机器人能自动转过去。
机器人如果前方发现有障碍物,一般说明正对着墙,就右转(左转)90度,如果发现左方有障碍物,一般说明左侧对着墙,就右转(左转)约60度。
在门口拐角处要求机器人处理碰撞,程序中,让机器人一旦检测到碰撞,就后退一点,再右转(左转)约60度。
在虚拟环境中配上合适的虚拟环境试验。
声音测试在较安静的情况下,机器人静止不动,当有人发出声音时,有节奏的回应。
设置流程图为:运行结果:当没有声音时,机器人处于待机状态静止不动,当有声源时,机器人有节奏的回应。
红外检测(碰撞检测同理)机器人附带红外检测模板,在虚拟环境中运行机器人,机器人能够在虚拟环境中依靠红外测试仪检测周边环境中是否存在障碍物,如果存在障碍物,机器人将执行后退,右转(左转)的操作。
然后沿着墙壁行走直至检测到下一个障碍物接着做避免的动作,碰撞测试与此相同。
检测模板不同而已。
设置流程图如下:。
